1. Introduction
In recent times, non-metallic pipes have gained precedence in offshore project development. A multitude of research has delved into understanding the behaviour of such pipelines [
1,
2,
3]. High-density polyethylene (HDPE) often finds use as an internal lining for steel pipes in marine environments and forms part of composite pipe material. Regarding the HDPE, limited studies have been conducted recently, as follows.
Kuliczkowska and Gierczak [
4] examined the buckling failure mechanisms of HDPE rehabilitation pipes and assessed various design strategies against this issue. Their research revealed notable discrepancies in different calculation methods and highlighted key factors in buckling evaluation. Yang et al. [
5] investigated the abnormal leakage effect of a buried HDPE pipe. They concluded that most of the failures may be caused by erosion–corrosion and mechanical damage and have investigated the biological degradation. Wu et al. [
6] conducted field explosion tests on buried HDPE pipelines, analysing factors influencing dynamic responses. Based on their findings, they established explosive charge standards and devised damage prediction models for different damage levels. Majid and Elghorba [
7] conducted HDPE pipe failure analysis by a static test and proposed simplified approaches to assess the damage. Guidara et al. [
8] performed a structural integrity assessment of defected HPDE pipes. They focused on the burst test and FE-based ECA by a J-integral technique. Guidara et al. [
9] continuously proposed a semi-empirical model for structural integrity assessment for HDPE pipes. However, studies related to subsea pipeline installation using HDPE pipes are limited.
Other frequent linings include polyvinyl chloride (PVC), fusion-bonded epoxy (FBE), and corrosion-resistant alloy (CRA) [
10,
11]. Conversely, pure HDPE pipes dominate the construction of seawater intake and discharge systems in coastal processing facilities. Extensive research has been conducted on the installation of offshore carbon steel pipelines and pipe-in-pipe systems [
12,
13,
14]. However, offshore HDPE pipeline installations diverge from carbon steel installations, primarily because of HDPE’s lightweight properties. Carbon steel pipes predominantly employ the S-lay and J-lay installation methods. The S-lay process sees the pipeline transition from a horizontal vessel position, curving downwards to the seabed in an emblematic S-shape. In contrast, the J-lay method, preferred for deeper waters, deploys the pipeline from a vertical lay system (VLS) tower, assuming a J-shape [
15].
Pipelines during offshore installations endure external pressure, bending, and axial load from various environmental forces [
16,
17], impacting their fatigue life over operational phases [
18,
19,
20,
21]. Hence, ensuring pipelines perform as designed without compromising integrity is paramount. Analytical optimization of the design is vital for effective real-world operation, underlining the importance of a profound understanding of installation analysis modelling techniques. HDPE pipes in marine applications, predominantly for water intake or discharge, are favoured due to their high corrosion resistance, low surface roughness (enhancing hydraulic behaviour), and exceptional resilience against environmental forces. Roberts et al. [
22] indicated that outfall diffuser depths typically range from 20 m to 40 m. Pipelines situated in water depths beyond 60 m are classified as deep water. Notably, in 2012, Makai Ocean Engineering undertook a repair study on a 40” diameter HDPE intake pipeline located at a depth of 670 m. Utilising the Orcaflex software (ver 9.6), Rocheleau and Jensen [
23] crafted a finite element (FE) model to emulate a large-diameter catenary HDPE pipeline and its anchoring system, enhancing the repair methodologies through a better understanding of design behaviour.
Several authors, including Johansen et al. [
24] and Ravlic et al. [
25], have illuminated the challenges of subsea pipeline installations. In brief, the challenges including the research gap and the technical reviews on HDPE pipeline studies and guidelines are concisely illustrated in
Figure 1a,b. More recently, Kim et al. [
26] detailed the design and installation of an ultra-large HDPE intake pipeline in Algeria, boasting a diameter of 2.5 m and dimension ratios of 26 and 30. The pipe dimension ratio (DR) is defined as the ratio of a pipe’s outer diameter to its wall thickness. Intriguingly, as the DR increases, indicating a larger diameter, the wall thickness proportionally decreases.
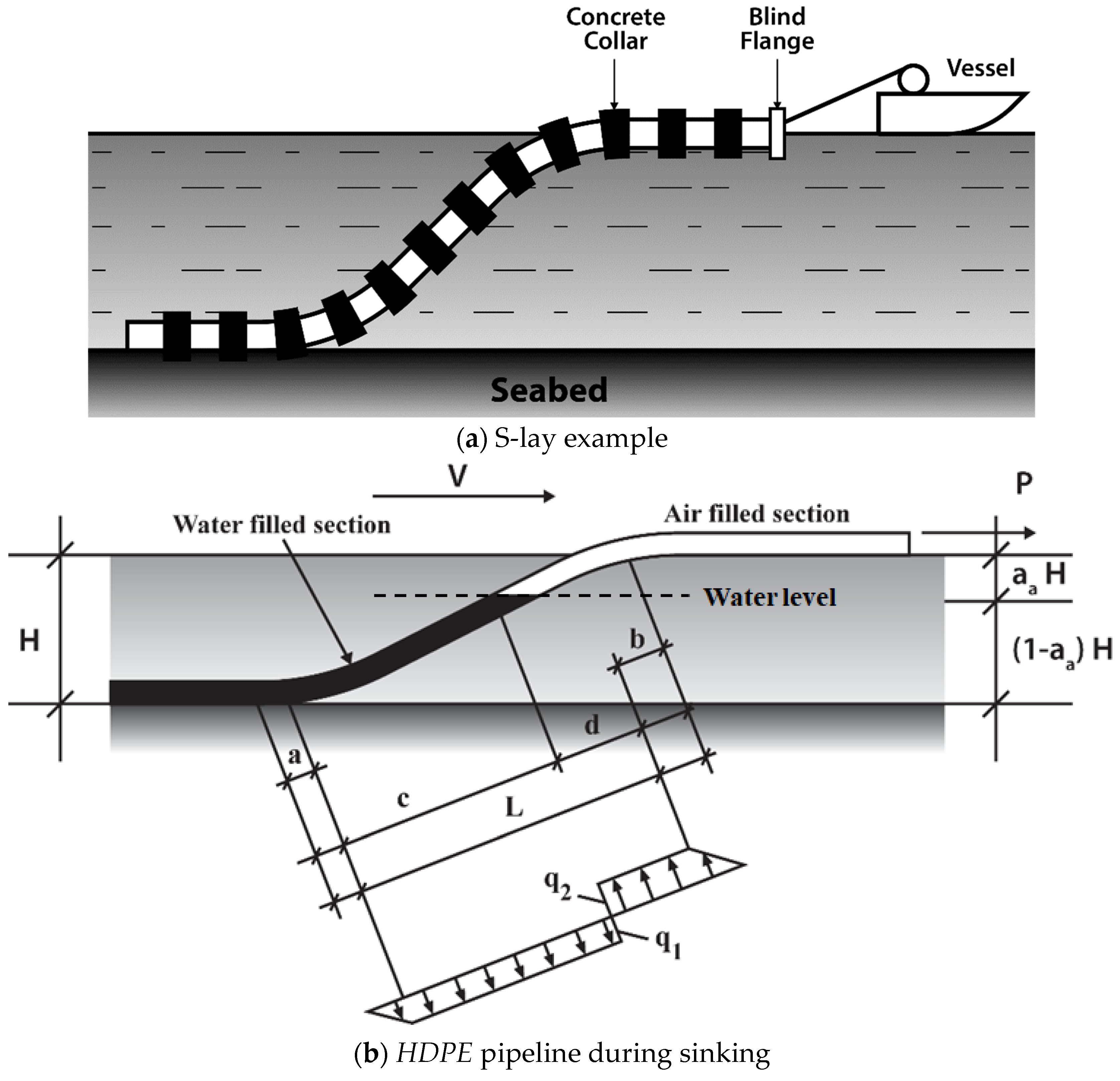
A critical observation was that the pipe’s simplified minimum yield stress (SMYS) stood at a significant 92%, especially when considering a 70 kN pulling force. The HDPE pipeline is typically installed via the float-and-sink method, as illustrated in
Figure 2a. Enhanced modelling techniques during the sinking phase can potentially yield improved analysis results. Since the introduction of PE pipes for marine installations in the late 1950s, the S-lay sinking method has predominantly been employed. As presented by Andtbacka et al. [
33], the essential premise of this method involves the pipe initially floating on the seawater’s surface, followed by water being filled from one end while pull tension is exerted at the opposite end.
However, a novel conceptual study by Stentiford and Wooley [
27] proposed three distinct installation methods for PE pipelines for depths of up to 1000 m. The first, known as the ocean surface floating tow method, requires buoyancy modules to be fixed at specific intervals. These modules ensure the pipeline’s top breaches the seawater’s surface. Following this, the pipeline is towed to its designated location by a tugboat. Once in position, buoys are gradually released, causing the pipeline to descend onto the seabed. The second method, termed the buoyant catenary, employs a clump weight attached at both the inshore and offshore ends of the pipeline. Installation is orchestrated so that both weights descend to their respective positions. Due to its low-density nature, the buoyancy of the PE pipeline makes it assume an inverted catenary shape. Lastly, the ocean floor tow method allows the pipeline to be towed out to sea, hovering just above the seabed to minimise current impacts.
Historically, the definition of “large diameter” for PE pipes has evolved. In 1982, a pipe with a 1.0 m diameter and a dimension ratio of 23 was deemed large [
28]. By 2009, marine cooling water pipelines for the Terga power plant were being constructed with a diameter of 2.0 m and a dimension ratio of 26 [
34]. Presently, PE pipes are manufactured in sizes reaching up to 3260 mm in diameter, with dimension ratios ranging from 17 to 41 [
35]. Consequently, it is plausible to infer that mechanical properties consistent with pipes smaller than 3.0 m can be achieved, given the similarity in dimension ratios. This research endeavours to provide insights into the characteristics and behaviour of large-diameter HDPE and to introduce a streamlined model to predict the bend radius of the pipeline during offshore installation. This study specifically examines pipes of 2.0 m, 2.5 m, and 3.0 m in diameter, spanning dimension ratios of 17, 21, 26, 33, and 41.
2. Sinking Process Mechanism
Earlier research primarily relied on static analysis of pipeline issues. Initially, the pipeline profile, often assumed to adopt an S-shape during the sinking operation, was an unknown variable. The most critical stage is the sinking process, depicted in
Figure 2b. For a successful installation, it is imperative to strike a balance between the downward forces (
q1) and upward forces (
q2). Downward forces primarily stem from the concrete weights attached to the pipeline, while the buoyancy of the air-filled pipeline section generates the upward forces.
For the sinking process to commence and progress, the downward forces must slightly outweigh the upward forces. However, maintaining this delicate balance remains a central challenge. It is crucial to prevent the acceleration of downward forces; this can be managed by monitoring the sinking speed and adjusting the internal air pressure accordingly. If sinking speed escalates, air pressure can be increased, and the reverse is also true. Tools like valves and compressors play a vital role in regulating this pressure. A primary concern for the pipeline is potential damage due to buckling at the sea’s surface or bottom, caused by bending. As illustrated in
Figure 2b, key factors influencing the sinking process include upward and downward forces, pulling force (
P), air pressure, and sinking velocity (
V). Notably, this study specifically focuses on the upward, downward, and pulling forces.
4. Geometric Formulation of S-Lay Bend Radius
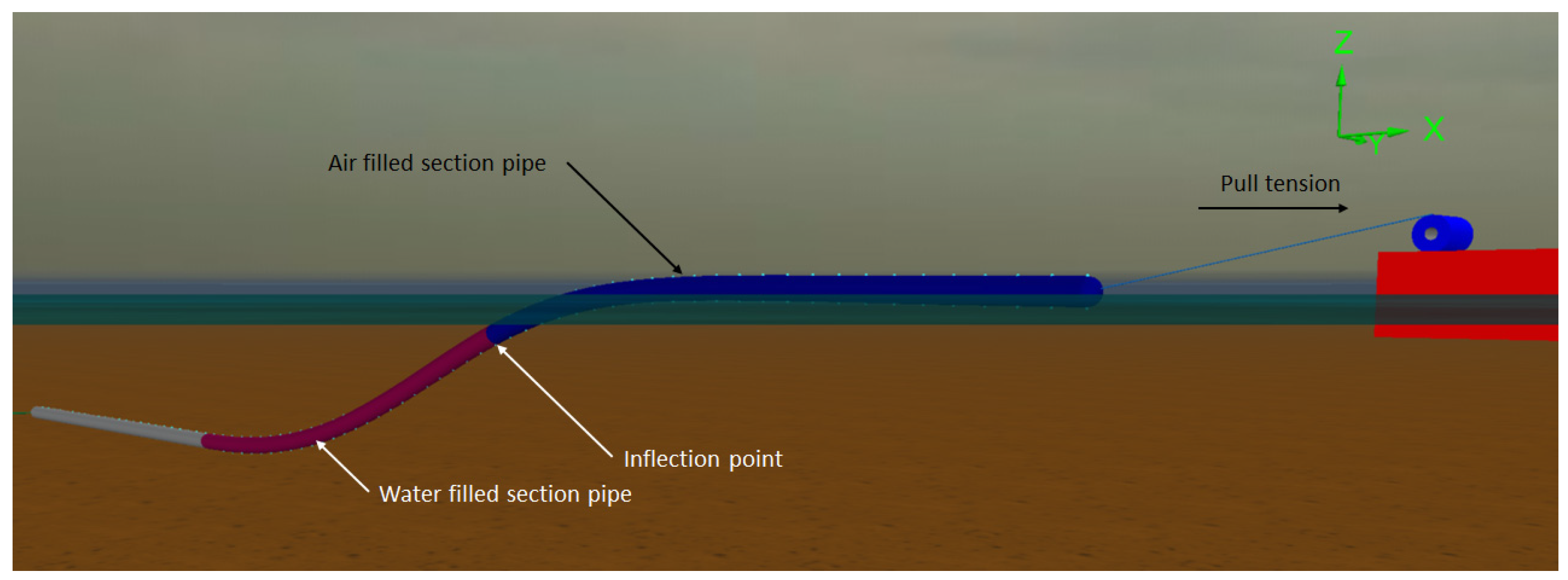
During the float-and-sink operation, the pipeline’s static configuration is primarily influenced by two factors: the pulling tension and the internal air pressure. Of these, only the pulling tension can be actively controlled during the sinking process, given that the bend radius inherently depends on this tension. This axial tension in the pipeline is characterised by both vertical and horizontal components.
The vertical component arises from the combination of the water depth and the weight of the flooded pipe. In contrast, the horizontal pull tension serves a crucial role in managing the characteristic “S” configuration of the pipeline as it transitions from the water’s surface to the seabed. This transition can be segmented geometrically into two distinct sections: the overbend and sagbend, visualised in
Figure 19. From the configuration provided in
Figure 19, a relationship between R, X, and Y is derived, with the Pythagoras theorem offering the foundational basis for the relationship, as articulated in Equation (3):
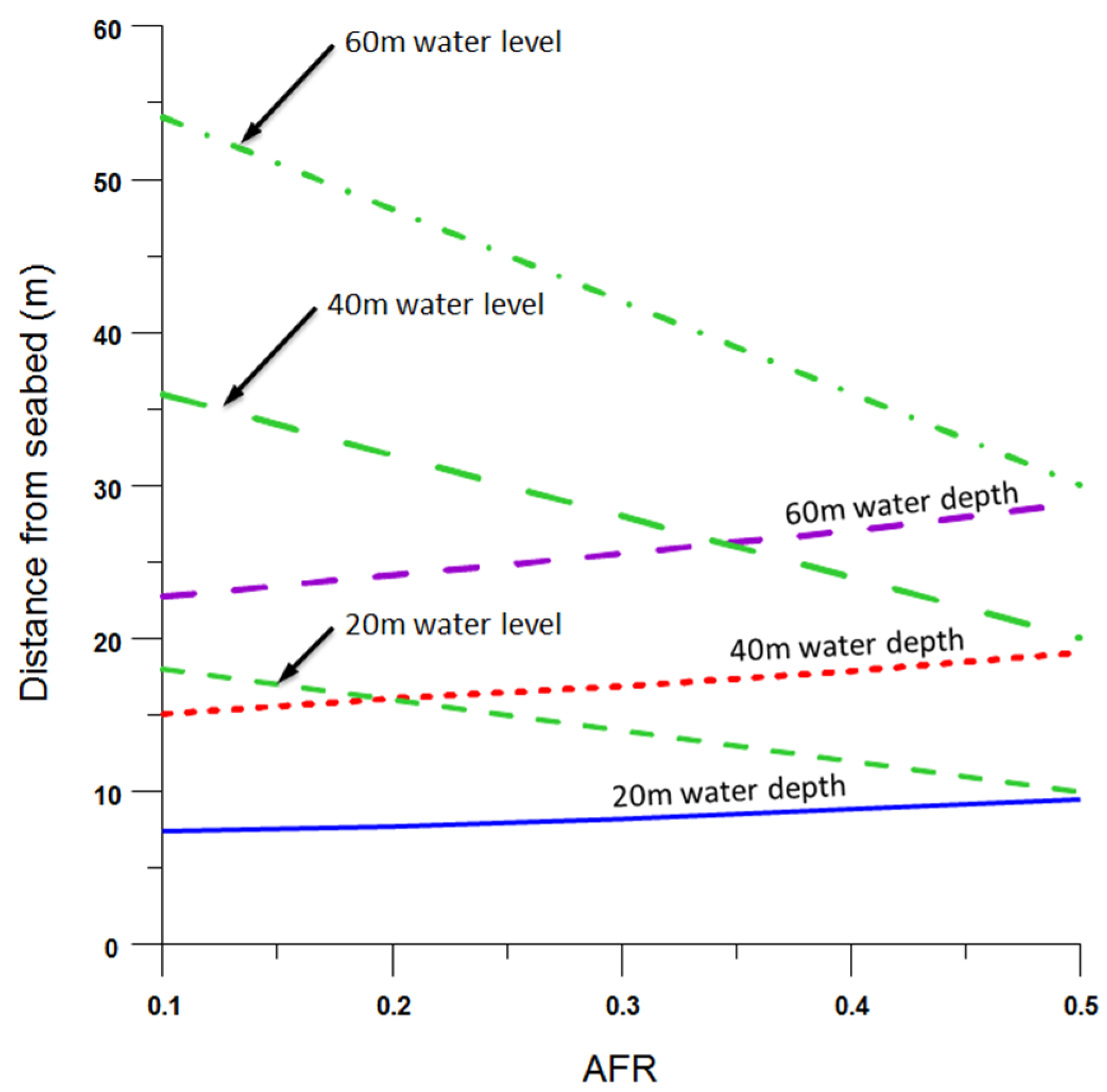
where R represents the pipe’s bending radius in the sagbend region. The parameter X denotes the horizontal distance between the inflexion point and the touchdown point (TDP), while Y signifies the vertical distance from the inflexion point to the seabed. Additionally, “w.d.” refers to the water depth, and AFR stands for the air fill ratio. Interestingly, a design with a 50% air fill ratio results in comparable pipe curvature in both the overbend and sagbend regions.
In practical scenarios, the general understanding is that the bend radius along a catenary continuously decreases, reaching its minimum value in the touchdown zone (TDZ). However, this study’s focus is on large-diameter pipes, characterised by their heightened bending stiffness. As a result, the influence of the bend radius on the catenary’s shape becomes less pronounced.
5. Identification of Parameters X and Y
The geometry of parameter (
Xh) also depends on the water depth, tension, and AFR [
29]. The general equation derived for this parameter is:
In the equation, the factor “K” stands as the slope of the regression line when comparing tension to the parameter—Xh. This slope, represented by factor K, conveys the rate of change in parameter X with respect to the pull tension, T. Furthermore, the term Xi designates the initial horizontal distance. Given that both the water depth and the pipe diameter influence the parameter X, the factor K is adjusted to encompass effects from these variables, making it a function of both water depth and pipe diameter.
To shed light on this relationship, a correlation analysis was conducted. This analysis assessed the water depth—acting as the predictor—across all three pipe sizes in relation to factor “
K”.
Figure 20 captures this relationship, showcasing a positive linear regression for pipes with diameters of 2.0 m, 2.5 m, and 3.0 m. Stemming from these observed relationships, a more comprehensive equation, Equation (5), was crafted. This equation positions factor
K as a function of water depth and pipe diameter, and it is grounded in the principles of linear regression analysis.
Since
Xi is the initial horizontal distance (pipeline without pull tension), it is dependent on the water depth and AFR property.
Figure 21 shows that
and
have a power relationship with constants
and
as Equation (6). This diagram also demonstrates that these constants are dependent on water depth. As water depth increases, the constant
and
increase as well. Hence, the correlation of constant
and
as a function of water depth and pipe diameter was established. From a simple correlation study, both constants
and
have quadratic correlation, and the general equation for these constants can be derived as shown in Equations (7) and (8).
Thus, combining all of these functions, the general equation for parameter
is proposed as below:
The relationship developed between
AFR and
Y is a linear regression line with linear term m and constant term
C. Constant (
m) is the slope, and (
C) is the y-intercept where both of these values are functions of water depth. Based on the parameter
profile in
Figure 22, there is a positive linear correlation observed between (
m) and (
C) and the water depth. As water depth increases, these two constant terms increase as well. Thus, from observation, factors (
m) and (
C) can be obtained from Equation (10).
Table 8 summarises this correlation and the recommended factor values. The recommended values were selected by averaging the factor for each water depth linear profile. Then, these two-factor values were substituted into a linear equation to form a general equation for estimating the inflexion point location or lay vertical parameter
Y. Hence, the recommended general equation derived for parameter
proposed is as Equation (11).
7. Concluding Remarks and Recommendations
In light of these findings, the outcomes presented in this research are best suited for the Pre-FEED stage of HDPE structural design. This implies that they hold considerable potential for early-phase considerations, aiding in preliminary evaluations without the need for exhaustive data or analysis. However, as with any scientific endeavour, it is essential to recognise the boundaries of its applicability. While this study has made significant strides, there are specific limitations that have been underscored:
Diameter Constraints: The reliability of the design equation may diminish for pipes with a diameter of less than 2.0 m or those that exceed 3.0 m.
Water Depth Considerations: The model’s efficiency might be compromised in locations where water depths extend beyond 60 m.
DR Spectrum: The equation is finely tuned to a particular DR (dimension ratio) range, specifically between 17 and 41. Results outside this domain need to be interpreted with caution.
Given these constraints, it is pivotal for stakeholders to treat this equation as a preliminary tool, avoiding its application for conclusive design decisions. In closing, while the research has bridged some gaps, the journey towards a comprehensive and universally applicable design equation is ongoing. To fortify the findings and expand the horizons of the proposed model, further research is advocated. Such endeavours would aim to refine the model, addressing its present limitations, and ensuring it is adaptable to a broader spectrum of marine HDPE pipeline installations.
The influence of pipelay parameters on the dynamic behaviour of HDPE pipeline offshore installation is an essential aspect for broader understanding. Therefore, it is recommended to carry out further study on the hydrodynamic behaviour of offshore HDPE pipeline installation in the future.



 and
and 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























