



Systematization of Legal Procedures for Collision Avoidance between a Fully Autonomous Ship and a Traditional Manned Ship


Abstract
:1. Introduction
1.1. Background
1.2. Contributions
- (1)
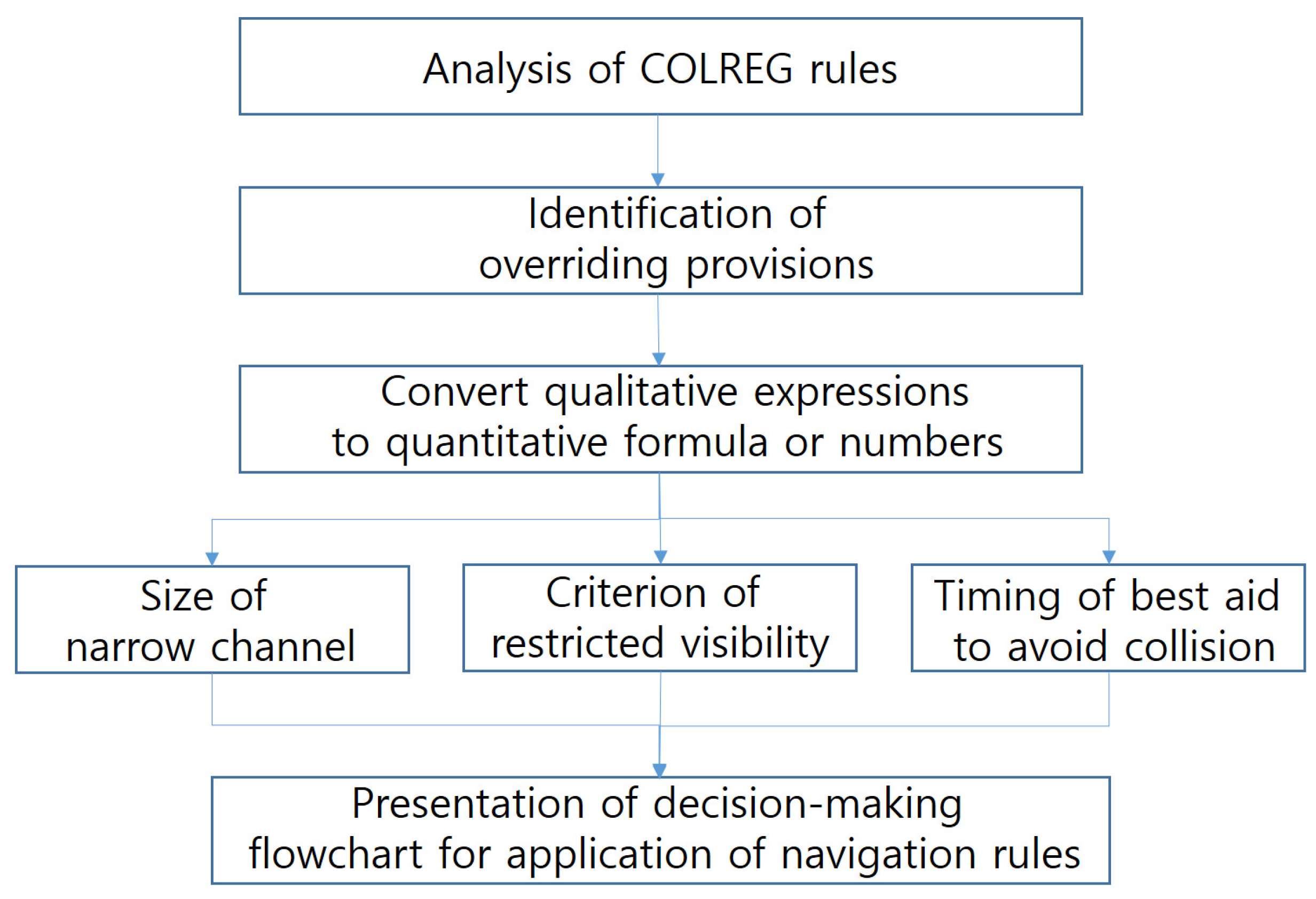
- This paper carefully analyzes the navigation rules of the COLREG and develops a decision-making flowchart that is essential for determining the appropriate legal actions to avoid collisions between ships;
- (2)
- Numbers and formulas have enabled autonomous ships to interpret legal terms written for human navigators by the COLREG.
2. Methodology
3. Analysis of Navigation Rules
3.1. History of Navigation Rules
3.2. Geographic Coverage of the COLREG
3.2.1. Narrow Channel
3.2.2. TSS Zones
3.2.3. Port Zone and the Other Waters
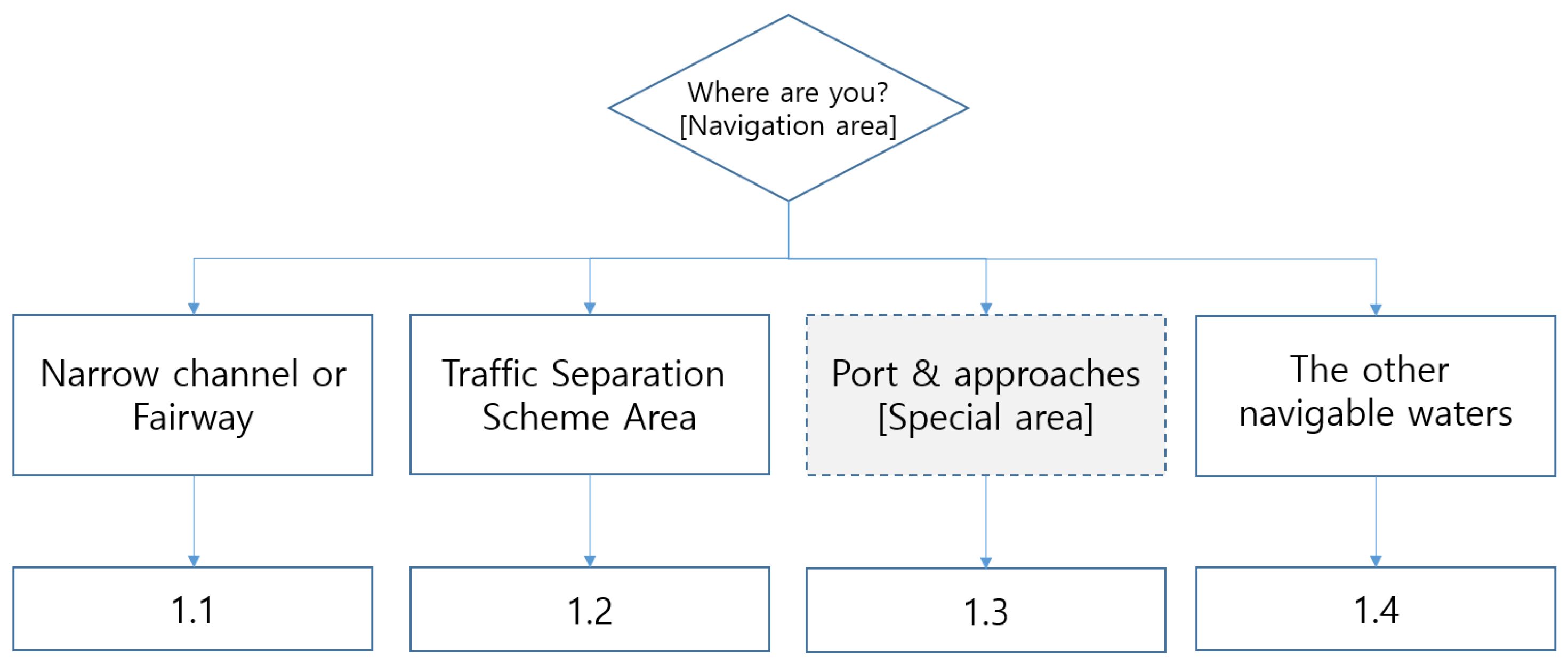
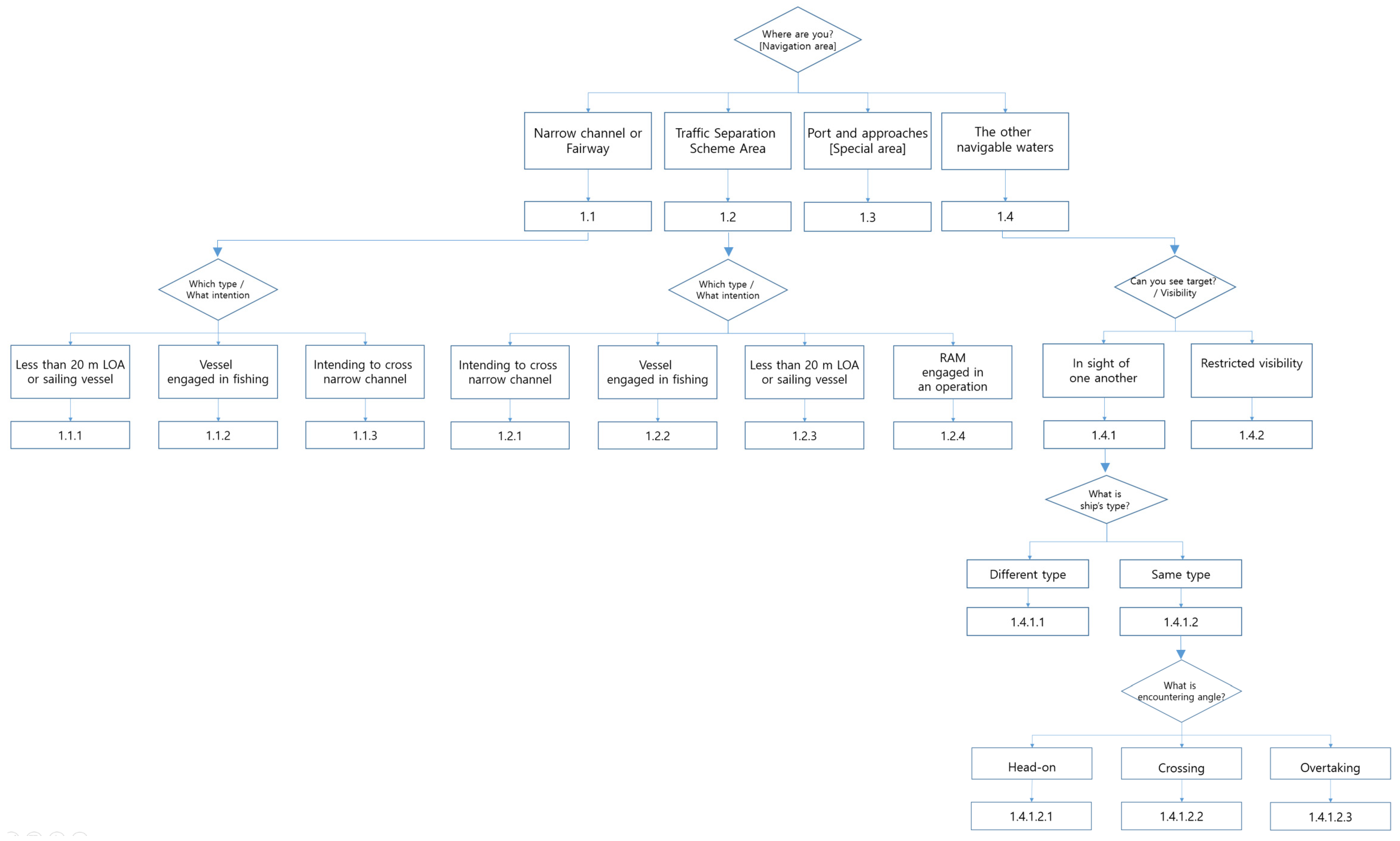
3.2.4. Flowchart of Geographical Application
3.3. Application of Navigation Rules in Confined Waters
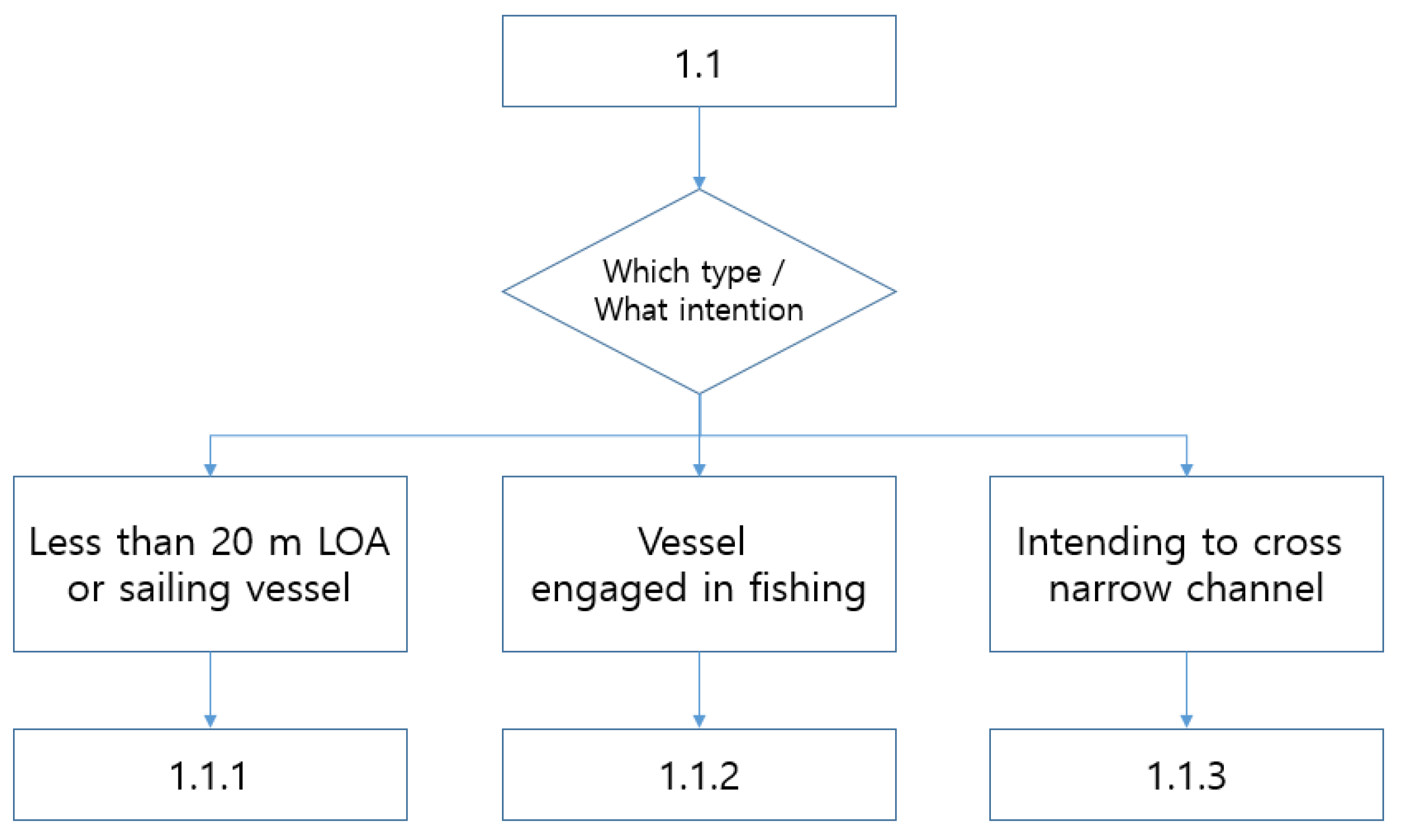
3.3.1. Navigation Rules in a Narrow Channel
- No. 1.1.1 is provided in COLREG Rule 9(b): “A vessel of less than 20 m in length or a sailing vessel shall not impede the passage of a vessel which can safely navigate only within a narrow channel or fairway.”
- No. 1.1.2 is provided in COLREG Rule 9(c): “A vessel engaged in fishing shall not impede the passage of any other vessel navigating within a narrow channel or fairway.”
- No. 1.1.3 is prescribed in COLREG Rule 9(d): “A vessel shall not cross a narrow channel or fairway if such crossing impedes the passage of a vessel which can safely navigate only within such channel or fairway. The latter vessel may use the sound signal prescribed in Rule 34(d) if in doubt as to the intention of the crossing vessel.”
3.3.2. Navigation Rules in TSS Zones
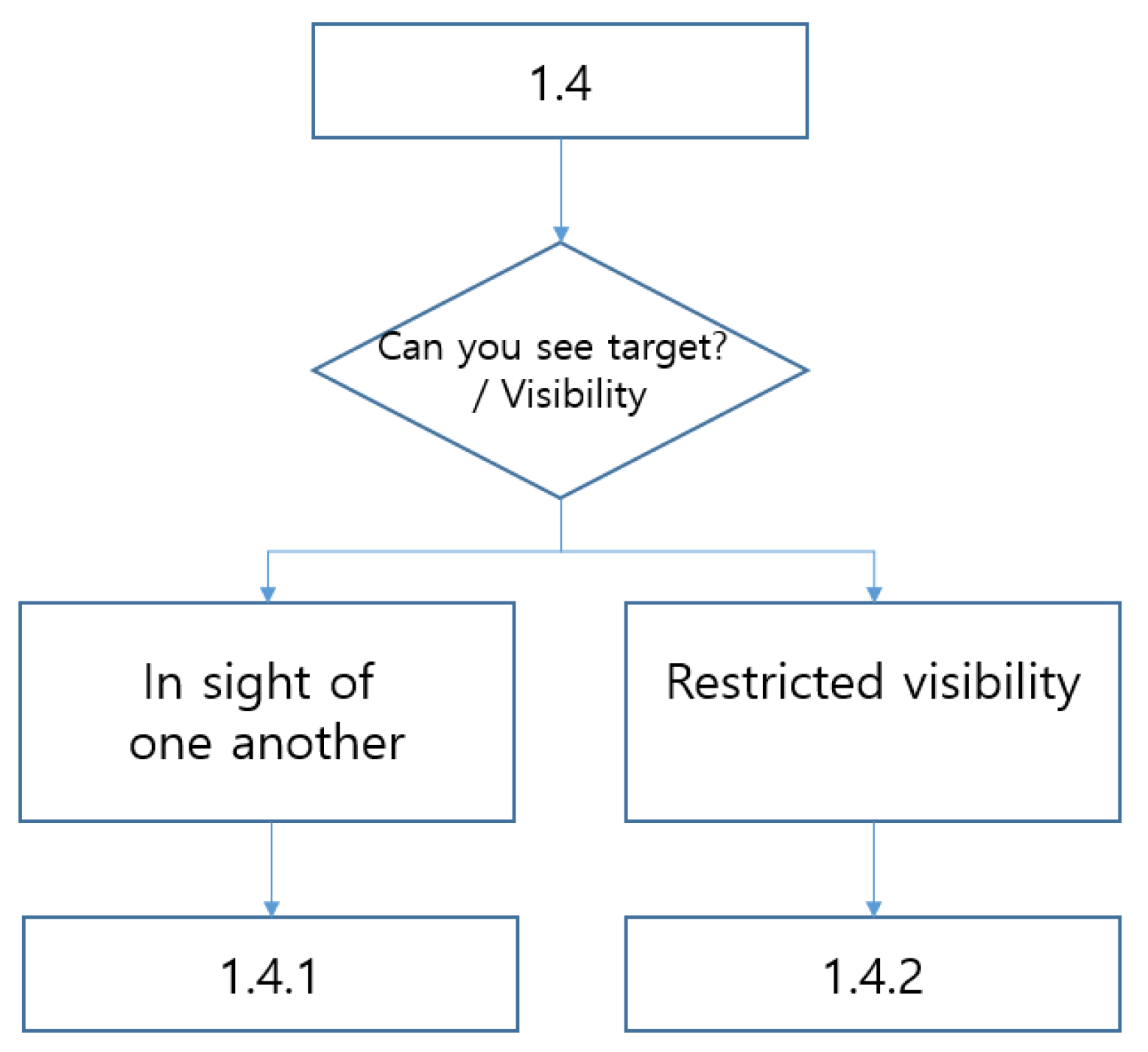
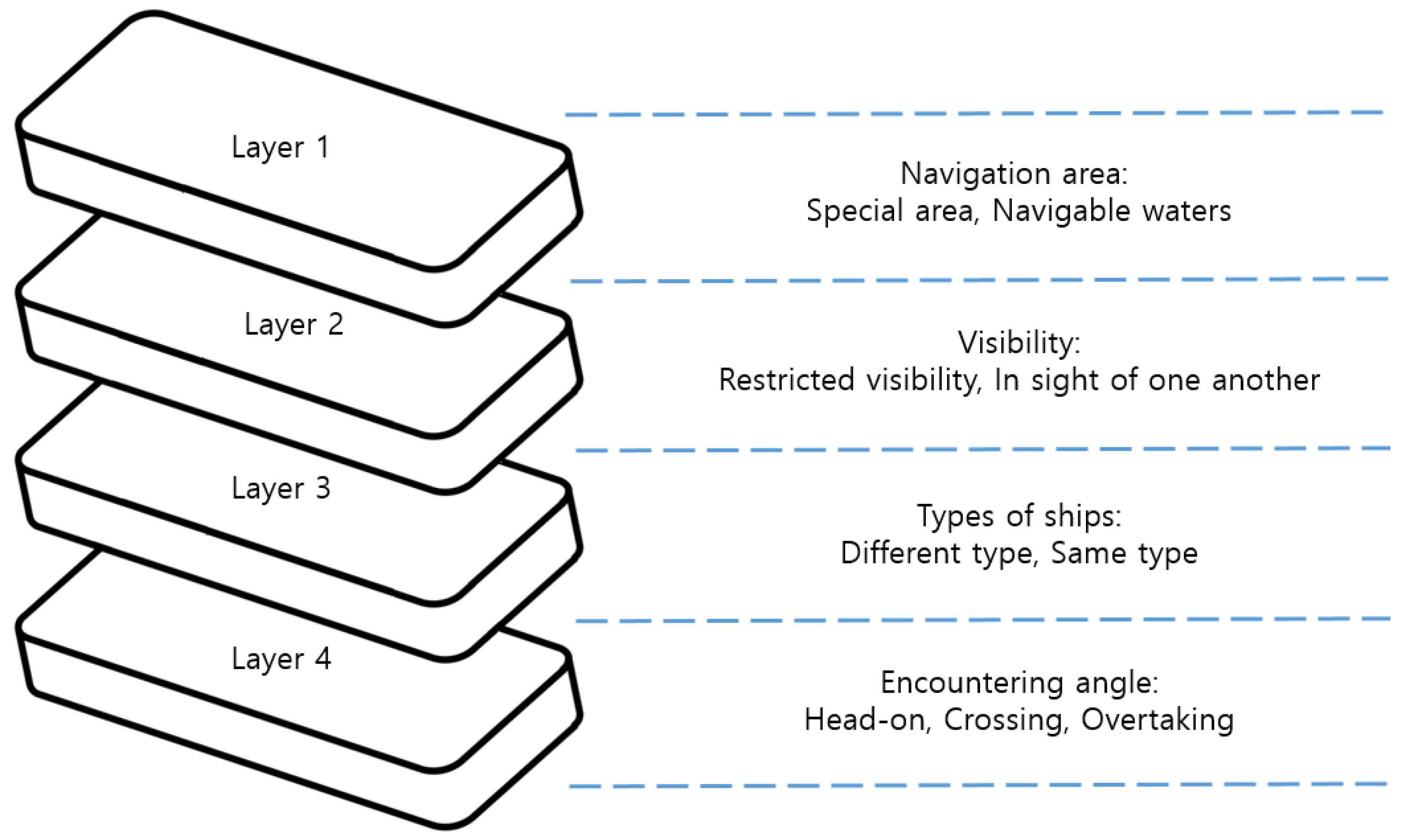
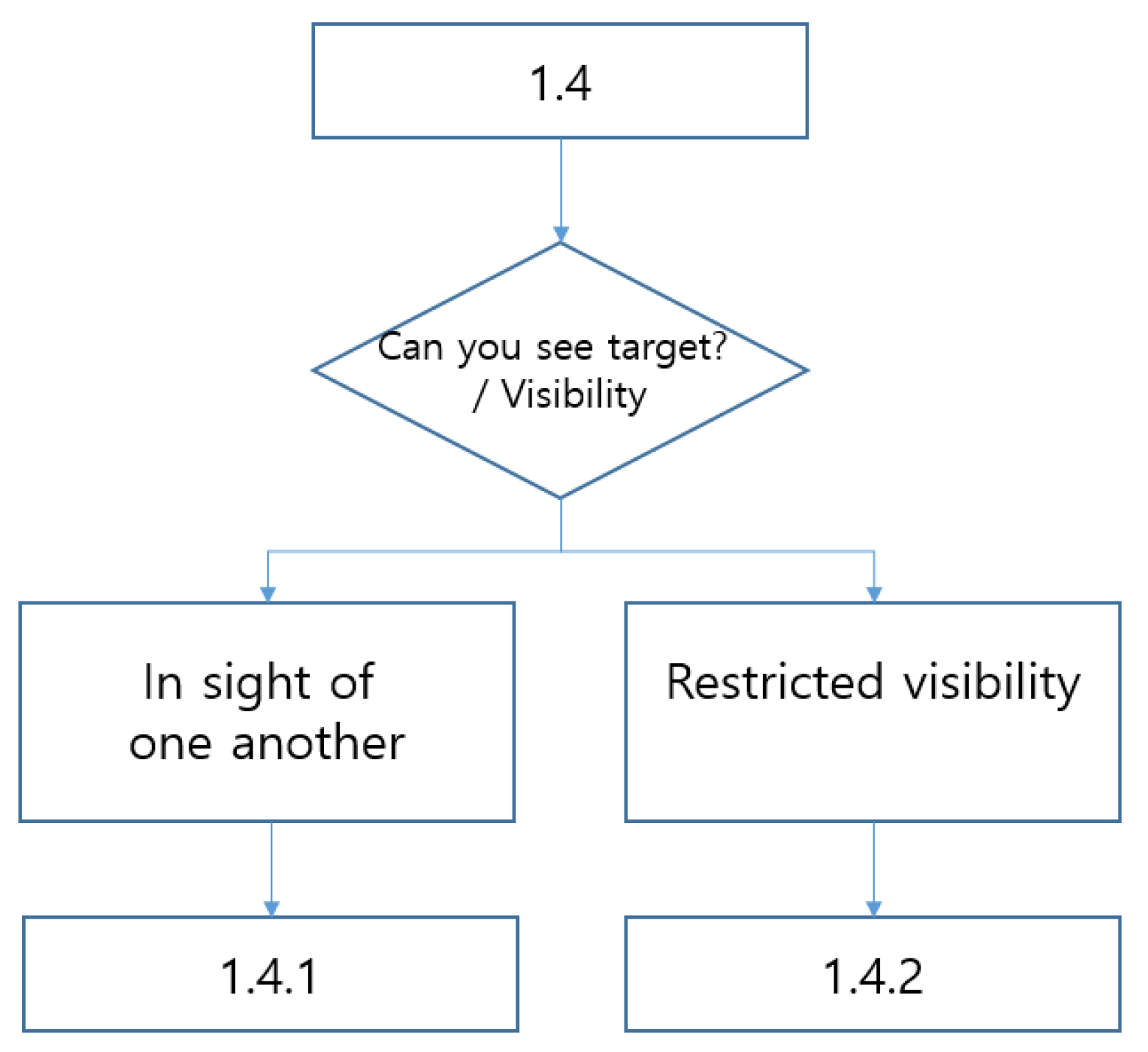
3.4. Application of Navigation Rules Based on Visibility
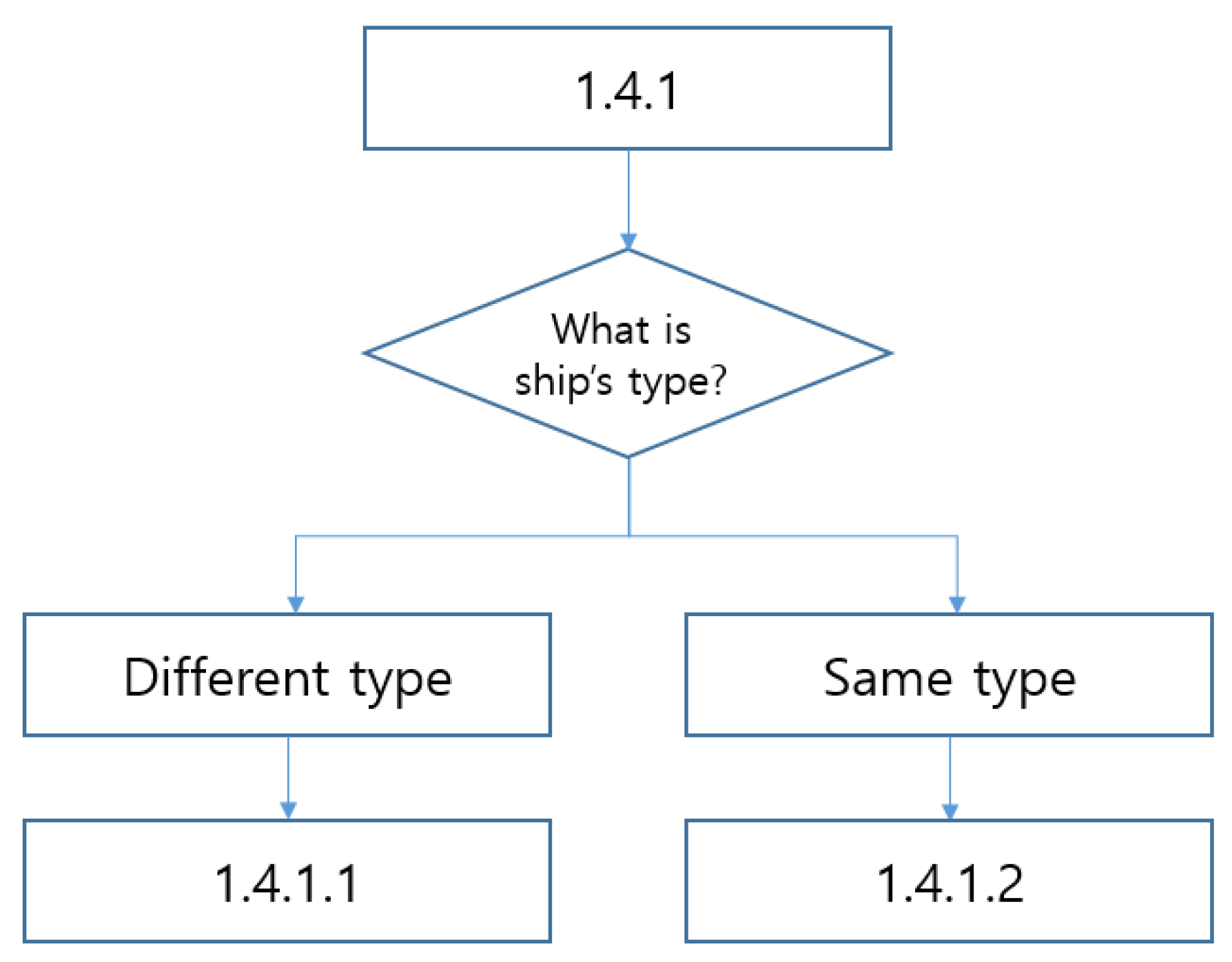
3.4.1. Navigation Rules When Vessels Are in Sight of One Another
Responsibilities to Give Way between Vessels
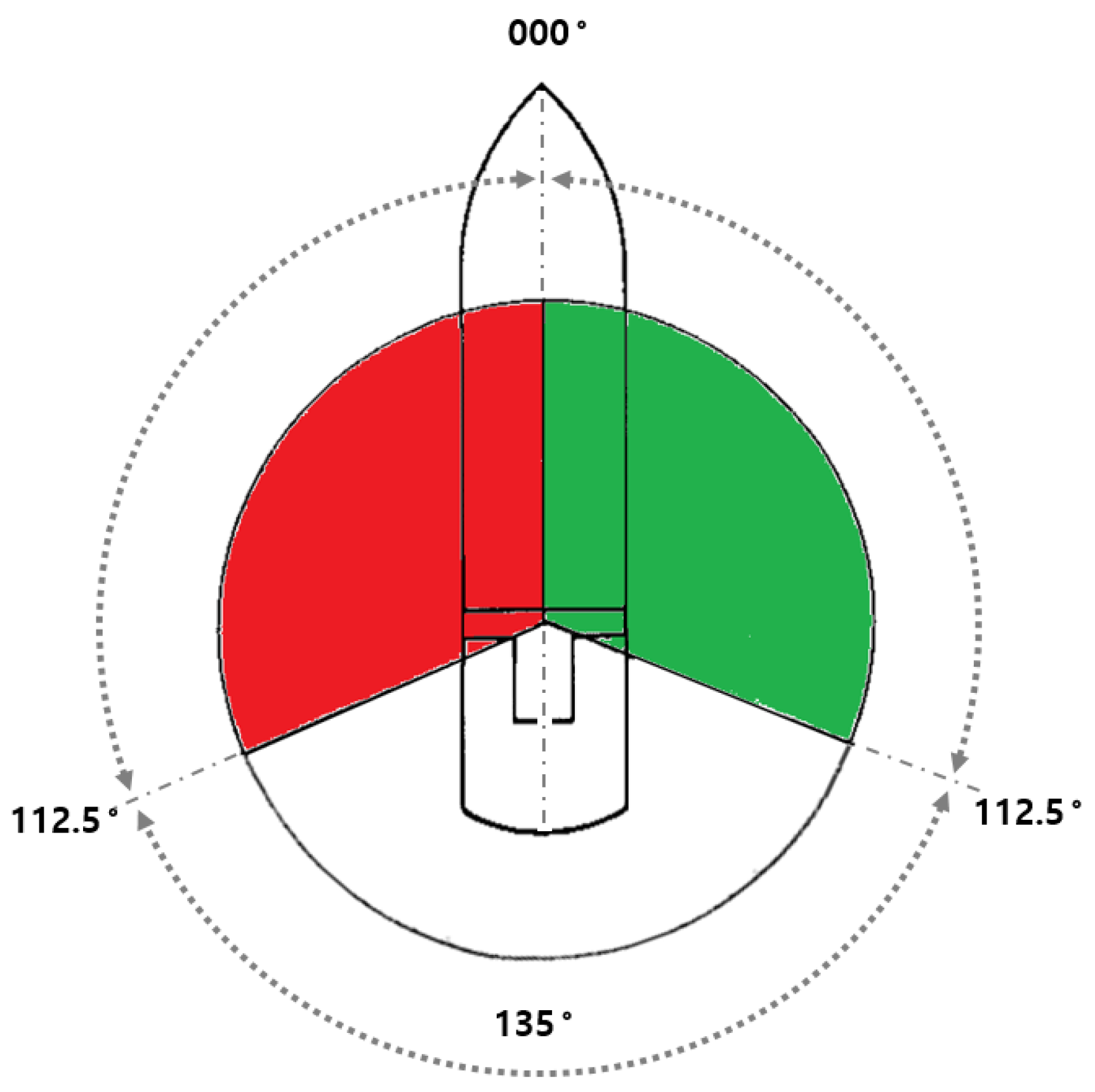
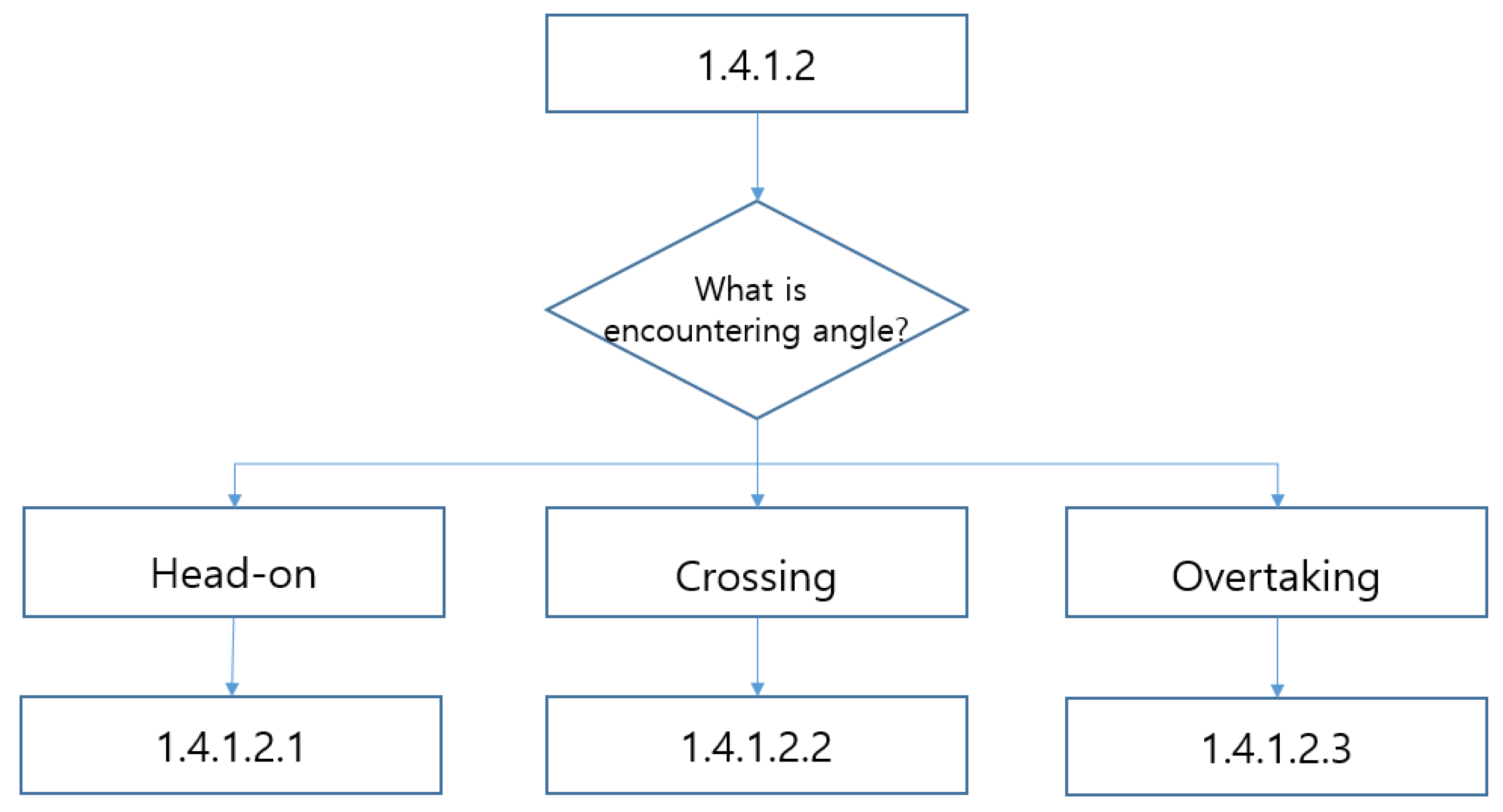
Responsibilities for Encounter Angle
3.4.2. Conduct of Vessels in Restricted Visibility
3.4.3. Summary of Tree Structure for Decision-Making
4. Quantification of Qualitative Expression
4.1. Width of Narrow Channel
4.1.1. Distance Exposed to Risk of Collision
4.1.2. Judgment Based on Legal Stability
4.1.3. Audible Distance of Sound Signal
4.1.4. Ship’s Safe Domain
4.1.5. Judicial Precedent
4.1.6. Discussion and Proposal
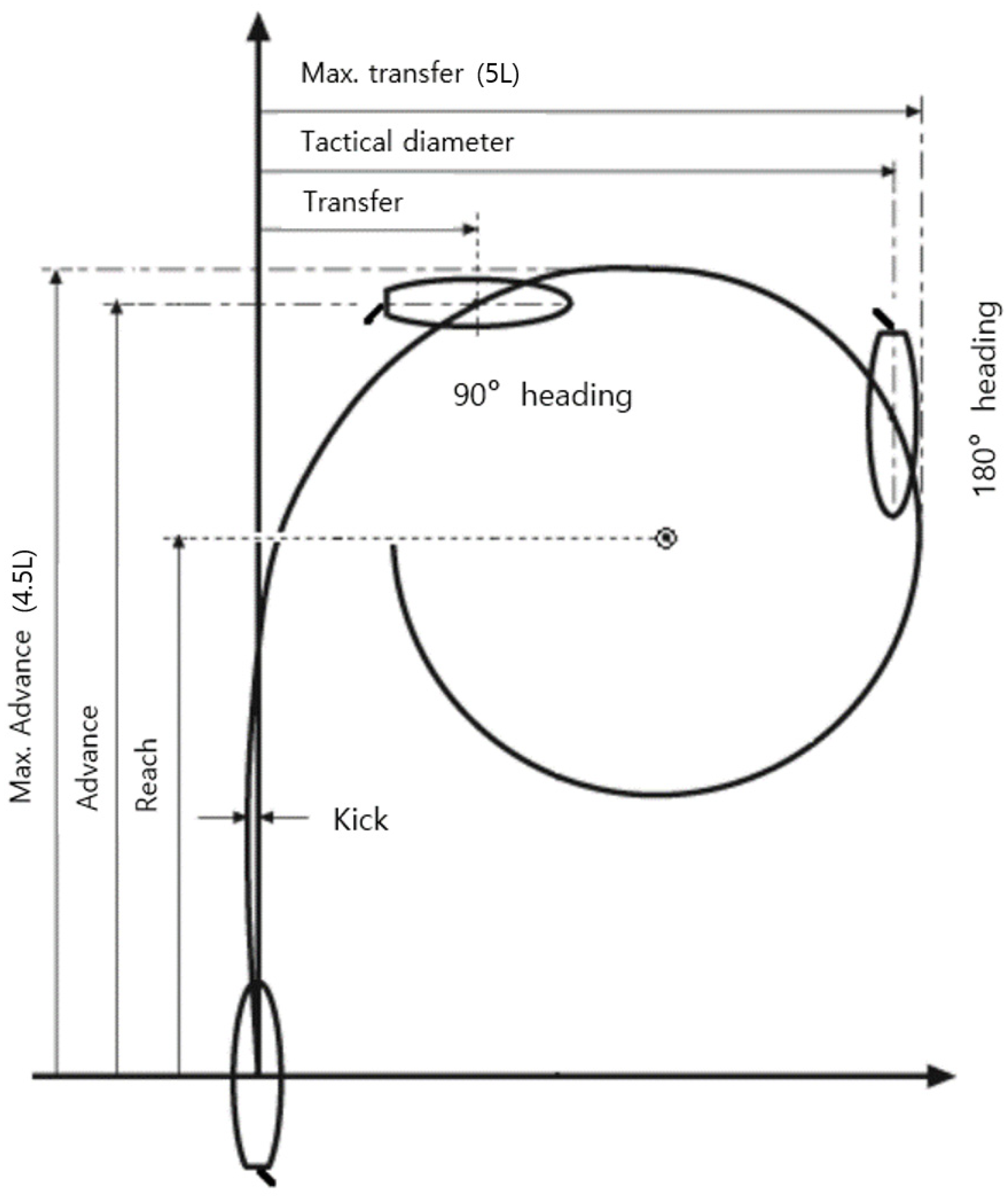
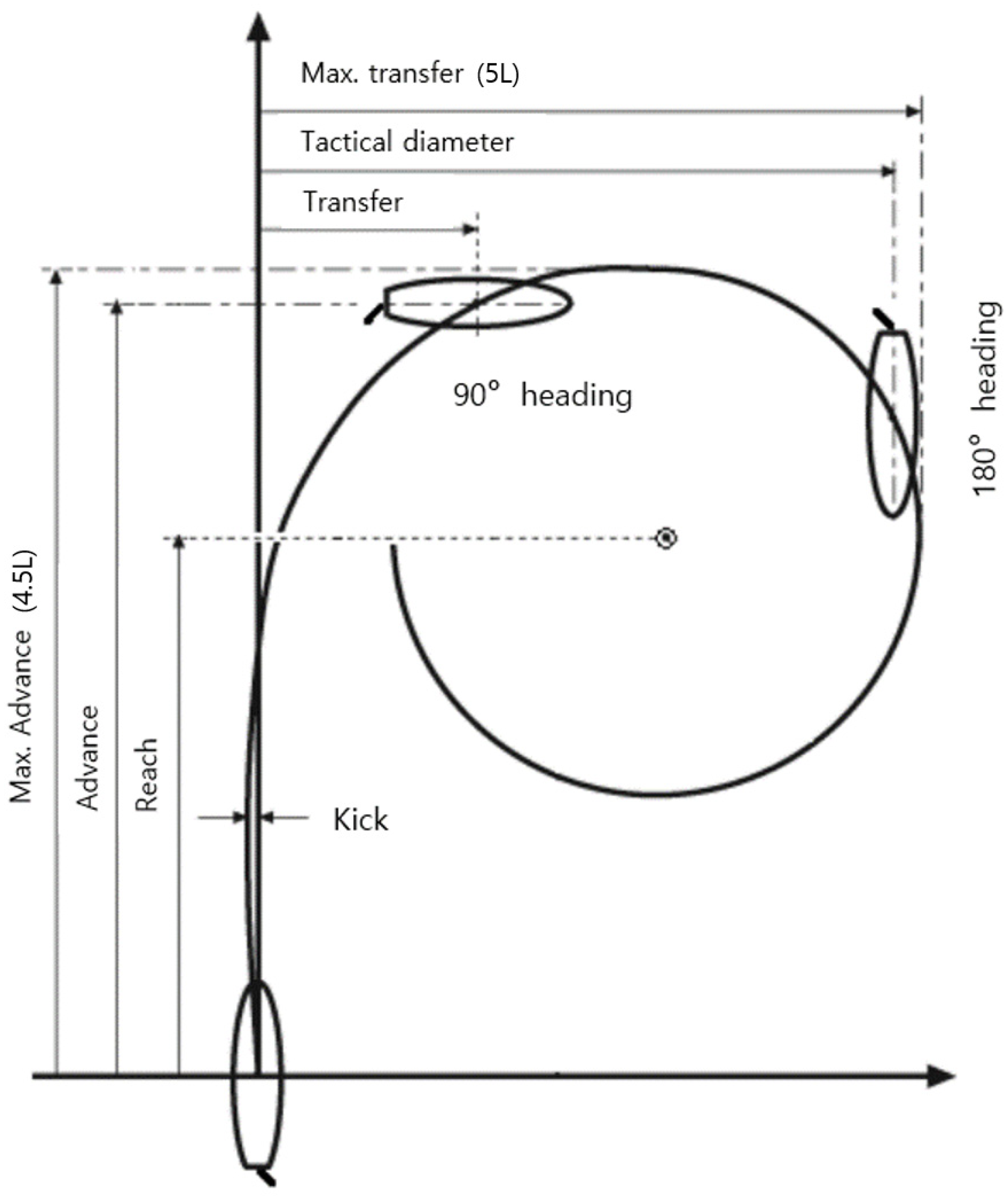
4.2. Time to Take the Best Aid to Avoid Collision
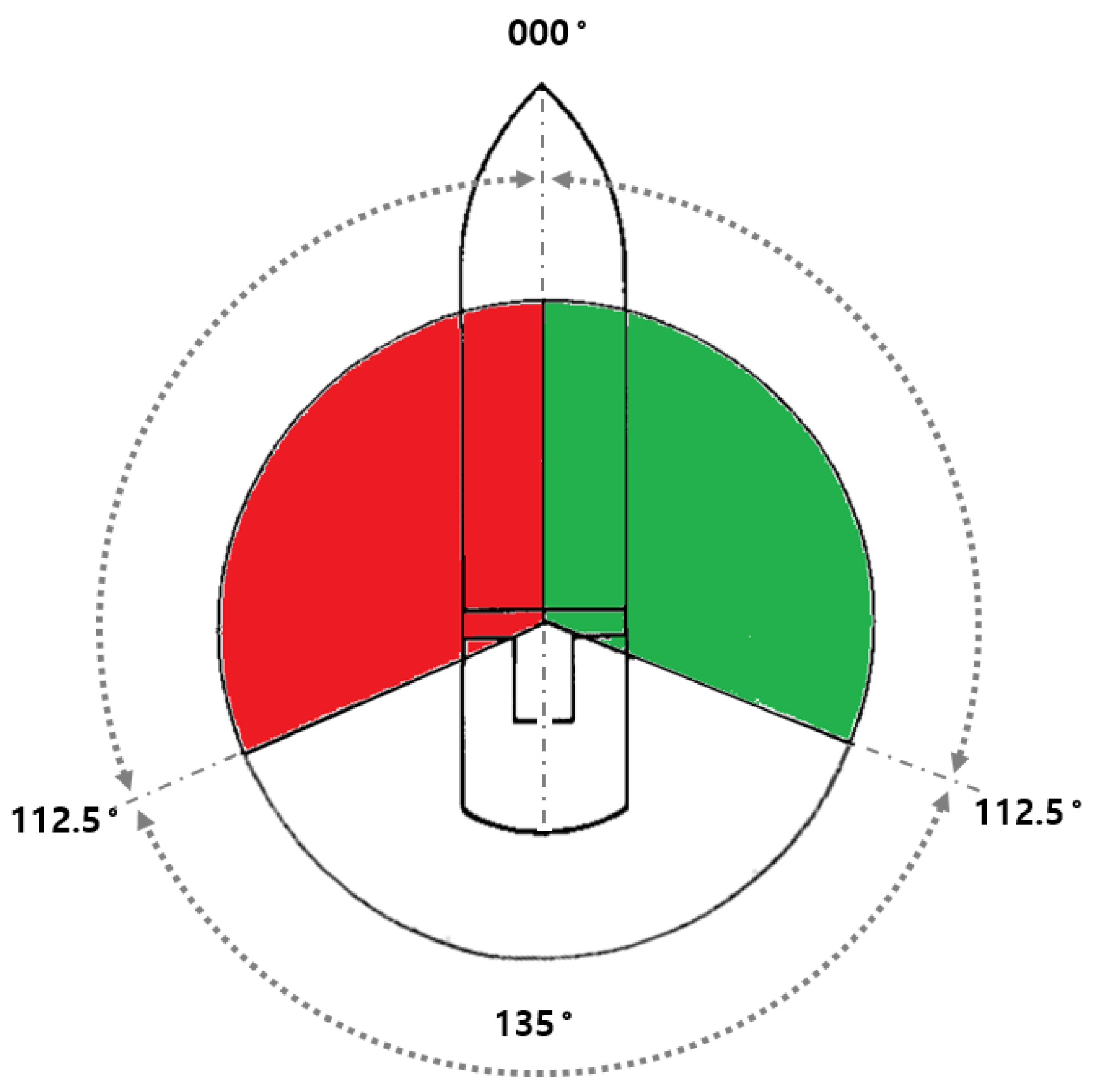
4.3. Visual Length in Restricted Visibility
4.4. Summary of Quantitative Analysis of Qualitative Expression
5. Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | Artificial intelligence |
| CBD | Vessel constrained by her draft |
| COLREG | Convention on the International Regulations for Preventing Collisions at Sea |
| CPA | Closest Point of Approach |
| DCPA | Distance to CPA |
| ICT | Information and communications technology |
| IMO | International Maritime Organization |
| IoT | Internet of Things |
| KMST | Korea Maritime Safety Tribunal |
| LOA | Length Overall |
| MASS | Maritime Autonomous Surface Ship |
| NM | Nautical mile |
| NTSB | United States National Transportation Safety Board |
| NUC | Vessel not under command |
| OPEX | Operating expenditure |
| PDV | Power-driven vessel |
| R&D | Research and development |
| RAM | Vessel restricted in her ability to maneuver |
| SOLAS | International Convention for the Safety of Life at Sea |
| TCPA | Time to CPA |
| TSS | Traffic Separation Scheme |
| USCG | United States Coast Guard |
| VHF | Very High Frequency |
| WIG | Wing-in-ground craft |
References
- Burmeister, H.; Bruhn, W. Designing an autonomous collision avoidance controller respecting COLREG. In Maritime-Port Technology and Development; Taylor & Francis Group: London, UK, 2015; pp. 83–88. [Google Scholar]
- Marine News. First Commercial Operation of an Autonomous Vessel Begins. Available online: https://www.marinetopia.com/news/articleView.html?idxno=43549 (accessed on 25 April 2023).
- Yonhap News. A Large Ship without a Crew—Full-Scale Competition in the Autonomous Navigation Market. Available online: https://yonhapnewstv.co.kr/news/MYH20230712006200641 (accessed on 12 July 2023).
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Sawada, R.; Sato, K.; Majima, T. Automatic ship collision avoidance using deep reinforcement learning with LSTM in continuous action spaces. J. Mar. Sci. Technol. 2021, 26, 509–524. [Google Scholar] [CrossRef]
- Fan, Y.; Sun, Z.; Wang, G. A novel reinforcement learning collision avoidance algorithm for USVs based on maneuvering characteristics and COLREGs. Sensors 2022, 22, 2099. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Cai, P.; Ahmed, Z.; Yellapu, V.S.; Zhang, W. Path planning and dynamic collision avoidance algorithm under COLREGs via deep reinforcement learning. Neurocomputing 2022, 468, 181–197. [Google Scholar] [CrossRef]
- Zhai, P.; Zhang, Y.; Shabo, W. Intelligent Ship Collision Avoidance Algorithm Based on DDQN with Prioritized Experience Replay under COLREGs. J. Mar. Sci. Eng. 2022, 10, 585. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Negenborn, R.R.; Van Gelder, P.H.A.J.M. A ship collision avoidance system for human-machine cooperation during collision avoidance. Ocean Eng. 2020, 217, 107913. [Google Scholar] [CrossRef]
- Puisa, R.; McNay, J.; Montewka, J. Maritime safety: Prevention versus mitigation? Saf. Sci. 2021, 136, 105151. [Google Scholar] [CrossRef]
- IMO (International Maritime Organization). Outcome of the Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS) (MSC.1/Circ.1638); IMO: London, UK, 2021. [Google Scholar]
- Kim, G.; Lee, S.I. A Study on Adaptation of the ISM Code to Maritime Autonomous Surface Ships (MASS). Marit. Law Rev. 2022, 34, 359–396. [Google Scholar] [CrossRef]
- Issa, M.; Ilinca, A.; Ibrahim, H.; Rizk, P. Maritime Autonomous Surface Ships: Problems and Challenges Facing the Regulatory Process. Sustainability 2022, 14, 15630. [Google Scholar] [CrossRef]
- Choi, J.H.; Lee, S.I. Brief Study on Duty to Render Assistance in Distress at Sea of Maritime Autonomous Surface Ship. Marit. Law Rev. 2020, 32, 147–178. [Google Scholar]
- Lee, S.I.; Choi, J.H.; Yoo, J.H. Current Status and Legal Issues of Autonomous Ships; Dasom: Busan, Republic of Korea, 2021. [Google Scholar]
- Yoo, J.H.; Jung, C.S.; Lee, S.I. A Study on the Ordinary Practice of Seamen as a Controlling Principle of MASS and its Revision of Maritime Laws. Marit. Law Rev. 2019, 31, 55–88. [Google Scholar] [CrossRef]
- Lee, S.I.; Choi, J.H.; Yoo, J.H. Normative Issues of Maritime Autonomous Surface Ships (MASS) Pursuant to the State Jurisdictions under UNCLOS. KMI Ocean Policy Res. 2018, 33, 145–180. [Google Scholar] [CrossRef]
- Choi, J.H.; Yoo, J.H.; Lee, S.I. Roles and Legal Status of the Remote Operator in a Maritime Autonomous Surface Ship: Focusing on the Concept of a Crew and a Master. Marit. Law Rev. 2018, 30, 155–186. [Google Scholar] [CrossRef]
- Choi, J.H.; Lee, S.I. An Interpretive Consideration relating to the Ship’s Definition of the Unmanned Ship. KMI Ocean Policy Res. 2018, 33, 171–192. [Google Scholar] [CrossRef]
- Kim, J.; Jang, H.S. Autonomous ship technology trends and preparations. BSNAK 2019, 56, 4–7. [Google Scholar]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; Van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Krzysztof, W.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar]
- De Vos, J.; Hekkenberg, R.; Valdez Banda, O. The Impact of Autonomous Ships on Safety at Sea—A Statistical Analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Bačkalov, I.; Vidić, M.; Rudaković, S. An analysis of accidents in inland navigation in context of autonomous shipping. In Proceedings of the 1st International Conference on the Stability and Safety of Ships and Ocean Vehicles, Scotland, UK, 7–11 June 2021. [Google Scholar]
- Bizwatch. ‘Tesla of the Sea’ When will the Autonomous Ship Launch? Available online: http://news.bizwatch.co.kr/article/industry/2022/05/06/0004 (accessed on 25 April 2023).
- Choi, J.Y. A Study on the Causes of Marine Accidents and Prevention of Marine Accidents in Vessels. CISSPC 2021, 25, 337–360. [Google Scholar] [CrossRef]
- Choi, C.W.; Noh, Y.; Shin, D.S.; Kim, H.M.; Park, H.C. Identifying Risk Factors of Marine Accidents in Coastal Area by Marine Accident Types. J. Korean Soc. Transp. 2021, 39, 540–554. [Google Scholar] [CrossRef]
- Kim, I.C.; Lee, H.H.; Lee, D.H. Development of a new tool for objective risk assessment and comparative analysis at coastal waters. J. Int. Marit. Saf. Environ. Aff. Shipp. 2019, 2, 58–66. [Google Scholar] [CrossRef]
- Kizilay, F.E.; Arslan, O.; Akyuz, E.; Kececi, T. Prediction of human error probabilitiy for officers during watchkeeping process under SLIM approach. Aust. J. Marit. Ocean Aff. 2023, 1–18. [Google Scholar] [CrossRef]
- Sheng, T.; Weng, J.; Shi, K.; Han, B. Analysis of human errors in maritime accidents: A Bayesian spatial multinomial logistic model. J. Transp. Saf. Secur. 2023, 1–17. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hannan, M.A.; Oraby, M.Y.; Maimun, A. COLREGs compliant fuzzy-based collision avoidance system for multiple ship encounters. J. Mar. Sci. Eng. 2021, 9, 790. [Google Scholar] [CrossRef]
- Chen, C.; Ma, F.; Xu, X.; Chen, Y.; Wang, J. A novel ship collision avoidance awareness approach for cooperating ships using multi-agent deep reinforcement learning. J. Mar. Sci. Eng. 2021, 9, 1056. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, D.J. SASD Modeling Using an ANFIS to Prevent the Collision of MASS in Restricted Areas. J. Mar. Sci. Eng. 2022, 10, 961. [Google Scholar] [CrossRef]
- Shaobo, W.; Yingjun, Z.; Lianbo, L. A collision avoidance decision-making system for autonomous ship based on modified velocity obstacle method. Ocean Eng. 2020, 215, 107910. [Google Scholar] [CrossRef]
- Wang, W.; Huang, L.; Liu, K.; Wu, X.; Wang, J. A COLREGs-Compliant Collision Avoidance Decision Approach Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2022, 10, 944. [Google Scholar] [CrossRef]
- Zhu, Z.; Lyu, H.; Zhang, J.; Yin, Y. An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field. J. Mar. Sci. Eng. 2021, 10, 3. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Chui, K.T.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef]
- Benjamin, M.R.; Curcio, J.A. COLREGS-based navigation of autonomous marine vehicles. In Proceedings of the 2004 IEEE/OES Autonomous Underwater Vehicles (IEEE Cat. No.04CH37578), Sebasco, ME, USA, 17–18 June 2004; pp. 32–39. [Google Scholar] [CrossRef]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events. Saf. Sci. 2019, 116, 33–44. [Google Scholar] [CrossRef]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The Algorithm of Determining an Anti-Collision Manoeuvre Trajectory Based on the Interpolation of Ship’s State Vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef] [PubMed]
- Kim, I.C.; Cheong, D.Y. Regulations for Preventing Collision at Sea; Doonam: Seoul, Republic of Korea, 2020; p. 13. [Google Scholar]
- The History of the Rule of the Road—Sailing Vessel History. Available online: https://www.allatsea.net/the-history-of-the-rule-of-the-road/ (accessed on 17 August 2003).
- History of the Collision Regulations. Available online: https://www.academia.edu/14931412/History_of_the_Collision_Regulations (accessed on 17 August 2003).
- IMCO (International Maritime Consultative Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMCO Res. A.464(12I)); IMO: London, UK, 1981. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.626(15)); IMO: London, UK, 1987. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.478(16)); IMO: London, UK, 1989. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.736(18)); IMO: London, UK, 1993. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.910(22)); IMO: London, UK, 2001. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.1004(25)); IMO: London, UK, 2007. [Google Scholar]
- IMO (International Maritime Organization). Amendments to the International Regulations For Preventing Collisions At Sea, 1972 (IMO Res. A.1085(28)); IMO: London, UK, 2013. [Google Scholar]
- Cockcroft, A.N. A Guide to the Collision Avoidance Rules, 6th ed.; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Lee, Y.C. Instruction of Maritime Traffic Law, 2016th ed.; Dasom: Busan, Republic of Korea, 2016; p. 248. [Google Scholar]
- Park, S.H.; Lee, Y.C. A Study on the Application of Navigation Rule in a Narrow Channel. J. Fish. Mar. Sci. Educ. 2018, 30, 1022–1031. [Google Scholar]
- Park, Y.S. Theory of Maritime Traffic Law; Hyungseol: Busan, Republic of Korea, 1998; p. 315. [Google Scholar]
- Yoon, J.D. COLREGs, 1972 and Related Domestic Rules in Korea, 12th ed.; Sejong: Busan, Republic of Korea, 2008; p. 102. [Google Scholar]
- Lee, C.H. A Study on the Definition and Navigation Rules for Narrow Channels. Res. Mar. Law 2017, 29, 42. [Google Scholar]
- Ji, S.W. A Study on the Status of Vessel Restricted in Her Ability to Manoeuvre in Narrow Channel. J. Navig. Port Res. 2010, 34, 833–838. [Google Scholar] [CrossRef]
- Kang, D.H. A Comments on the Case about Application of Navigation Rule in a Narrow Channel -Supreme Court Decision 2020.1.16. Docket No. 2019du54092 and Daejeon High Court Decision 2019.9.18. Docket No. 2019nu10342-. J. Law 2020, 44, 339–372. [Google Scholar]
- Kim, J.S. Narrow Channel Navigation Rule and whether a Vessel Engaged in a Towing is Restricted in her Ability to Manoeuvre or not—Focused on the Korean Supreme Court Judgment 2005.9.28 Docket No 2004chu65. JKMLA 2007, 29, 105–128. [Google Scholar]
- Kim, I.H. Maritime Traffic Law, 5th ed.; Samwoo: Seoul, Republic of Korea, 2018; p. 132. [Google Scholar]
- Lim, S.W. A Study about Navigation Application on Ship Collision Accident at Narrow Waterway. Korean Assoc. Marit. Police Sci. 2021, 11, 55–76. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543552. [Google Scholar] [CrossRef]
- Hasegawa, K. Fuzzy modelling of the behaviors and decision-making of ship navigators. In Proceedings of the 3rd International Fuzzy Systems Association (IFSA) Congress, Tokyo, Japan, 20–25 July 1989; pp. 663–666. [Google Scholar]
- Hasegawa, K.; Kouzuki, A. Automation Collision Avoidance System for Ships Using Fuzzy Control. J. Kansai Soc. Nav. Archit. 1987, 205, 1–10. [Google Scholar]
- Kijima, K.; Furukawa, Y. Design of Automatic Collision Avoidance System Using Fuzzy Inference. IFAC Proc. 2001, 34, 65–70. [Google Scholar] [CrossRef]
- Park, Y.S.; Park, J.S.; Shin, D.W.; Lee, M.K.; Park, S.W. Application of potential assessment of risk (PARK) model in Korea waterways. J. Int. Marit. Saf. Environ. Aff. Shipp. 2017, 1, 1–10. [Google Scholar] [CrossRef]
- Um, J.C.; Jang, W.J.; Cho, K.M.; Cho, I.S. A Study on the Assessment of the Marine Traffic Congestion and the Improvement of a Technical Standards. Korean Soc. Mar. Environ. Saf. 2012, 18, 416–422. [Google Scholar] [CrossRef]
- 68. DNV GL. Risikoanalyse av Farleder. Lengdebegrensninger ved Bruk av Farledsbevis; Kystverket Vest: Oslo, Norway, 2015. [Google Scholar]
- Kim, H.S. A Study on the safe width and alignment of the navigation channel. Korean Soc. Mar. Environ. Saf. 1995, 1, 9–25. [Google Scholar]
- Craig, H.A. Farewell’s Rules of the Nautical Road; Naval Institute Press: Annapolis, MD, USA, 2005; p. 286. [Google Scholar]
- Supreme Court of Korea Decision, 11 June 1993, Docket No. 1992chu55; Supreme Court of Korea: Seoul, Republic of Korea, 1993.
- Supreme Court of Korea Decision, 10 Dec. 1991, Docket No. 1991chu10; Supreme Court of Korea: Seoul, Republic of Korea, 1991.
- Supreme Court of Korea Decision, 28 Sep. 2005, Docket No. 2004chu65; Supreme Court of Korea: Seoul, Republic of Korea, 2005.
- Lee, Y.C. Theory of Maritime Traffic Law, 3rd ed.; Dasom: Busan, Republic of Korea, 2013; pp. 246–279.
- IMO (International Maritime Organization). Interim Standards for Ship Manoeuvrability (A.751 (18)); IMO: London, UK, 1993. [Google Scholar]
- IMO (International Maritime Organization). Standards for Ship Manoeuvrability (MSC.137 (76)); IMO: London, UK, 2002. [Google Scholar]
- IMO (International Maritime Organization). Appendix 3 on Stopping Ability of Very Large Ships of Interim Standards for Ship Manoeuvrability (MSC/Circ.644); IMO: London, UK, 1994. [Google Scholar]
- Eldridge, C. Electronic eyes for the allies: Anglo-American cooperation on radar development during World War II. Hist. Technol. 2000, 17, 1–20. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree | Level | Description |
|---|---|---|
| 1 | Ship with automated processes and decision support for seafarers on board | Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated and at times be unsupervised but with seafarers on board ready to take control. |
| 2 | Remotely controlled ship with seafarers on board | The ship is controlled and operated from another location. Seafarers are available on board to take control and to operate the shipboard systems and functions. |
| 3 | Remotely controlled ship without seafarers on board | The ship is controlled and operated from another location. There are no seafarers on board. |
| 4 | Fully autonomous ship | The operating system of the ship is able to make decisions and determine actions by itself. |
| Part | Title (Section) | Rule No. |
|---|---|---|
| Part A | General | 1–3 |
| Part B | Steering and Sailing Rules
| 4–10 |
| 11–18 | ||
| 19 | ||
| Part C | Lights and Shapes | 20–31 |
| Part D | Sound and Light Signals | 32–37 |
| Part E | Exemptions | 38 |
| Part F | Verification of Compliance with the Provisions of the Convention | 39–41 |
| Annex |
| - |
| Revised Year | Adopted/Entered into Force | Amended Rules |
|---|---|---|
| 1972 | 20 October 1972 15 July 1977 | Adoption |
| 1981 | 19 November 1981 1 June 1983 | Rule 1(c), 3(g), 3(g,v), 10(b,iii), 10(d), 10(e), 10(k), 10(1), 13(a), 22(d), 23(c), 24((a)(i), 24(c)(1), 24(d), 24(e), 24(g), 24(h), 24(1),25(b), 27(b), 27(b)(iii), 27(c) 27(d), 27(e), 27(f), 27(g), 29(a)(iii), 30(e), 30(f), 33(a), 34(b)(iii), 35(d), 36, 37, 38, 38h), Annex l/sec. 1, 2(f), 2(i)(i)„ 2(i)(ii), 2(j), 2(k), 3(b), 3(c), 5, 8, 9(a)(i), 9(a)(ii), 10(a), 10(b), 13, Annex lll/1(d), 2(a), 2(b), 3 [44] |
| 1987 | 19 November 1987 19 November 1989 | Rule 1(e), 3(h), New rule 8(f), 10(a), 10(c), Annex 1/section 2(d), 2(i)(ii), 10(a), (b), Annex IV/new para 1(o) [45] |
| 1989 | 19 October 1989 19 April 1991 | Rule 10(d)(i), 10(d)(ii) [46] |
| 1993 | 4 November 1993 4 November 1995 | Rule 26(b)(i), 26(c)(i), 26(d), Annex l/sec. 3(d), sec. 9(b), 9(b) (ii), New sec. 13, Annex ll/sec. 2(a), 2(b), 2(c), Annex IV/subpara. 1(0) [47] |
| 2001 | 29 November 2001 29 November 2003 | Rule 3(a), (m), Rule 8(a), Rule 18(f), Rule 23(c), Rule 31, Rule 33(a), Rule 35(i), Annex l/sec. 13, Annex 11 l/sec. 1-Whistles para, (a), (c), sec. 2-Bell or gong para. (b) [48] |
| 2007 | 29 November 2007 1 December 2009 | Annex IV [49] |
| 2013 | 10 December 2013 1 January 2016 | Rule 39 (new), Rule 40 (new), Rule 41 (new) [50] |
| Ship (Give-Way) | NUC | RAM | CBD | Vessel Engaged in Fishing | Sailing Vessel | PDV | Seaplane, WIG Craft |
|---|---|---|---|---|---|---|---|
| Seaplane, WIG Craft | |||||||
| PDV | |||||||
| Sailing vessel | |||||||
| Vessel engaged in fishing | |||||||
| CBD | |||||||
| RAM | |||||||
| NUC |
| Length of Vessel in Meters | 1/3rd-Octave Band Level at 1 m in dB Referred to 2 × 10−5 N/M2 | Audibility Range in NMs |
|---|---|---|
| 200 or More | 143 | 2.0 |
| 75 but Less than 200 | 138 | 1.5 |
| 20 but Less than 75 | 130 | 1.0 |
| Less than 20 | 120 | 0.5 |
| 115 | ||
| 111 |
| Light (NMs) | Masthead Light | Side Lights | Stern Light | Towing Light | All-Round Light | |
|---|---|---|---|---|---|---|
| LOA (Meter) | ||||||
| 50 or More | 6 | 3 | 3 | 3 | 3 | |
| 20~50 | 5 | 2 | 2 | 2 | 2 | |
| 12~20 | 3 | 2 | 2 | 2 | 2 | |
| Less than 12 | 2 | 1 | 2 | 2 | 2 | |
| Qualitative Terms | Proposal of Formula | Numbers |
|---|---|---|
| Width of Narrow Channel | First ship’s transfer (port 5L + starboard 5L) + approaching ship’s transfer (port 5L + starboard 5L) | Less than 20L |
| Time to Take the Best Aid to Avoid Collision | First ship’s advance (4.5L) + approaching ship’s advance (4.5L) and time to CPA | 9L TCPA |
| Visual Length in Restricted Visibility | Illuminated range of side lights |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, I. Systematization of Legal Procedures for Collision Avoidance between a Fully Autonomous Ship and a Traditional Manned Ship. J. Mar. Sci. Eng. 2023, 11, 1850. https://doi.org/10.3390/jmse11101850
Kim I. Systematization of Legal Procedures for Collision Avoidance between a Fully Autonomous Ship and a Traditional Manned Ship. Journal of Marine Science and Engineering. 2023; 11(10):1850. https://doi.org/10.3390/jmse11101850
Chicago/Turabian StyleKim, Inchul. 2023. "Systematization of Legal Procedures for Collision Avoidance between a Fully Autonomous Ship and a Traditional Manned Ship" Journal of Marine Science and Engineering 11, no. 10: 1850. https://doi.org/10.3390/jmse11101850
APA StyleKim, I. (2023). Systematization of Legal Procedures for Collision Avoidance between a Fully Autonomous Ship and a Traditional Manned Ship. Journal of Marine Science and Engineering, 11(10), 1850. https://doi.org/10.3390/jmse11101850