

Progress of Combined Wind and Wave Energy Harvesting Devices and Related Coupling Simulation Techniques

 , , ,
, , ,
Abstract
1. Introduction
2. Classification of CWWHDs
2.1. Wave Energy Converter (WEC)
2.2. Offshore Wind Turbine (OWT)
2.3. Combined Wind and Wave Energy Harvesting Devices (CWWHDs)
2.3.1. Oscillating Buoy CWWHDs
2.3.2. Oscillating Water Column CWWHDs
2.3.3. Overtopping CWWHDs
3. Theoretical Basis for Numerical Simulation of CWWHDs
3.1. Computational Theory of Hydrodynamics
3.1.1. Potential Flow Theory
3.1.2. Morrison Equation
3.1.3. Computational Fluid Dynamics
3.2. Computational Theory of Structural Dynamics
3.2.1. Quasi-Static Method
3.2.2. Static Catenary Method
3.2.3. Lumped Mass Method
3.2.4. Finite Element Method
3.3. Computational Theory of Aerodynamics
3.3.1. Blade Element Momentum Theory
3.3.2. Vortex Wake Method
3.3.3. Computational Fluid Dynamics (CFD)
4. Combined Simulation Implementation Method for CWWHDs
4.1. Adding Constant Aerodynamic Loads to the Hydrodynamic Time Domain Solver
4.2. ANSYS AQWA + External Dynamic Link Library
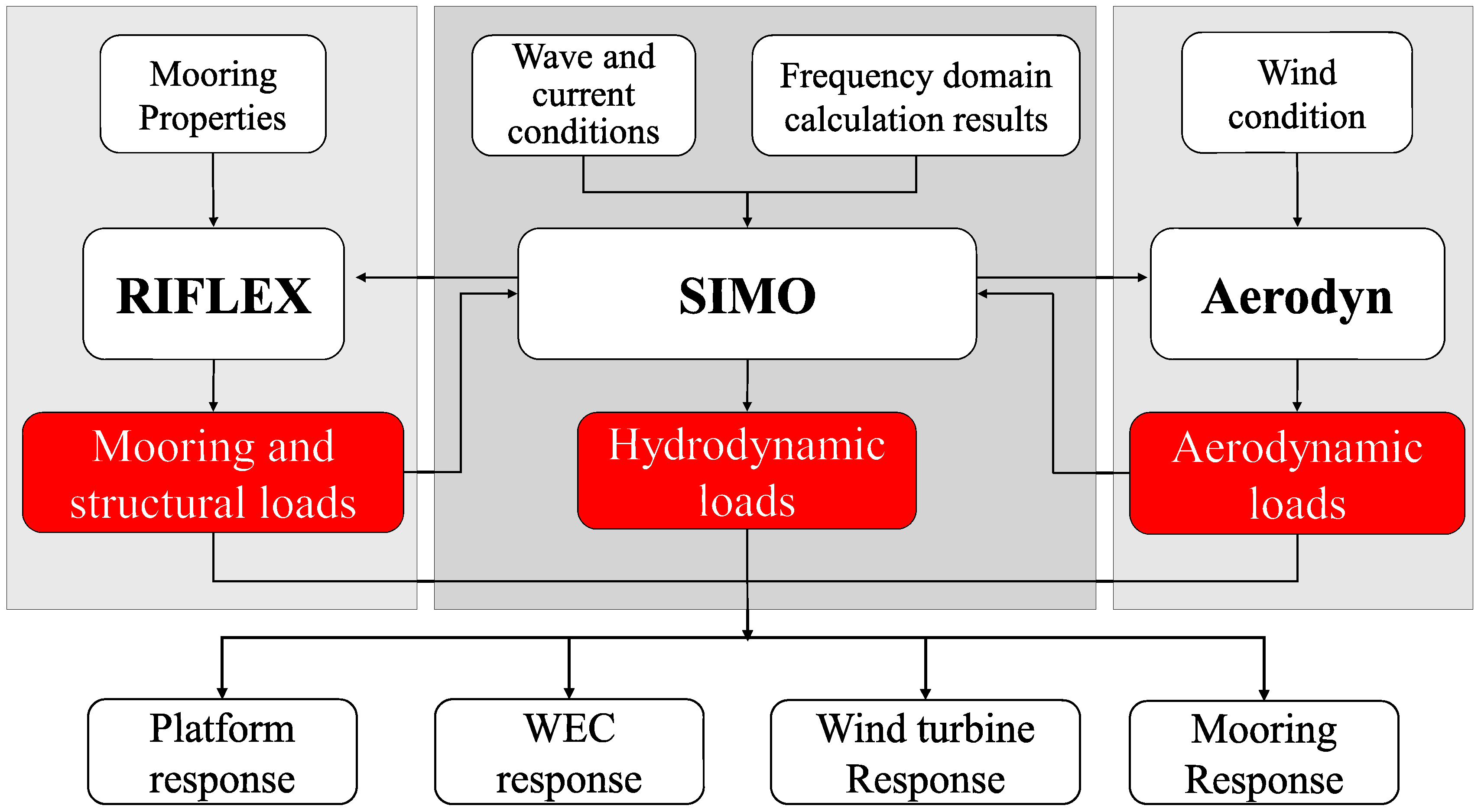
4.3. SIMO-RIFLEX-Aerodyn Combined Simulation System
4.4. Coupled Computational Solution Method Based on the Self-Developed Mathematical Model
4.5. F2A (FAST + ANSYS AQWA) Coupled Simulation System
4.6. Simulation with Aerodynamic Calculation Programs Such as FAST and HAWC2, Combined with Frequency Domain Solution Results of Hydrodynamic Software Such as WAMIT, ANSYS AQWA, and HydroD
5. Conclusions and Suggested Directions for Future Research
- (1)
- Increasing wind and wave energy development in deep and distant marine: wind and wave energy resources in the deep sea are better than those offshore, and the offshore device will greatly reduce the impact on near-shore facilities. Based on the above reasons and the current situation, a floating foundation may be the choice to balance economic efficiency and reliability.
- (2)
- Promoting research on the conditions and mechanisms of FOWT-WEC synergy: the hysteresis effect between the multi-floating bodies due to the interaction causes the wind turbine to generate more resistance, thus absorbing more wind energy and making the WECs move asynchronously with the semi-submersible platform, which improves the efficiency of the WECs. The synergy is manifested by the self-balancing effect of multi-floating body coupling, which reduces the motion amplitude of the semi-submersible platform. Therefore, it is an important direction for CWWHDs to realize the synergistic effect.
- (3)
- Advancing the development of integrated aero-hydro-servo-elastic fully coupled simulation software: the coupling among aerodynamic loads, hydrodynamic loads, and structural dynamic loads needs to be solved by combined simulation between different programs at the current stage, which usually has errors. Implementing data transfer and maintaining real-time is a major challenge for the current combined simulation calculation. Therefore, the development of integrated numerical simulation software with high accuracy is necessary for the design of CWWHDs.
- (4)
- Emphasizing the simulation of the constraints on the relative positions of WECs and OWTs and the simulation of the PTO: the current combined simulation system is not perfect for the simulation of the positional constraints of WECs in the time domain; for example, the limit setting of the heave-type WECs in the existing combined simulation system is difficult to achieve. The simulation of PTO often needs to be conducted by the secondary development of simulation software, which creates some difficulties for the combined simulation. Consequently, it is crucial to complete the simulation of the limitation of the position of the WECs and the PTO reaction force conveniently in the simulation process.
- (5)
- Promoting the improvement of computational accuracy and computational efficiency of integrated simulation systems: considering the behavior of wind turbine blades usually requires a large number of computational resources and high computational accuracy to support. Based on the existing theory, improving and optimizing the algorithm of the computational model and the method of numerical computation may greatly improve the efficiency of numerical computation on the demand of ensuring computational accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, J.; Wang, G.; Li, Z.; Yang, S.; Chong, W.T.; Xiang, X. A review on development of offshore wind energy conversion system. Int. J. Energy Res. 2020, 44, 9283–9297. [Google Scholar] [CrossRef]
- Global Wind Report 2022. Available online: https://gwec.net/global-wind-report-2022/ (accessed on 4 April 2022).
- Statistical Review of World Energy 2022. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporate/pdfs/energy-economics/statistical-review/bp-stats-review-2022-full-report.pdf (accessed on 12 June 2022).
- López, I.; Andreu, J.; Ceballos, S.; De Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Pérez-Collazo, C.; Greaves, D.; Iglesias, G. A review of combined wave and offshore wind energy. Renew. Sustain. Energy Rev. 2015, 42, 141–153. [Google Scholar] [CrossRef]
- Sheng, W. Wave energy conversion and hydrodynamics modeling technologies: A review. Renew. Sustain. Energy Rev. 2019, 109, 482–498. [Google Scholar] [CrossRef]
- Chen, G.; Belcher, S.E. Effects of long waves on wind-generated waves. J. Phys. Oceanogr. 2000, 30, 2246–2256. [Google Scholar] [CrossRef]
- Astariz, S.; Iglesias, G. Output power smoothing and reduced downtime period by combined wind and wave energy farms. Energy 2016, 97, 69–81. [Google Scholar] [CrossRef]
- Kalogeri, C.; Galanis, G.; Spyrou, C.; Diamantis, D.; Baladima, F.; Koukoula, M.; Kallos, G. Assessing the European offshore wind and wave energy resource for combined exploitation. Renew. Energy 2017, 101, 244–264. [Google Scholar] [CrossRef]
- McTiernan, K.L.; Sharman, K.T. Review of Hybrid Offshore Wind and Wave Energy Systems. J. Phys. Conf. Ser. 2020, 1452, 012016. [Google Scholar] [CrossRef]
- Du, X.; Du, L.; Cai, X.; Hao, Z.; Xie, X.; Wu, F. Dielectric elastomer wave energy harvester with self-bias voltage of an ancillary wind generator to power for intelligent buoys. Energy Convers. Manag. 2022, 253, 115178. [Google Scholar] [CrossRef]
- Li, L.; Gao, Y.; Yuan, Z.; Day, S.; Hu, Z. Dynamic response and power production of a floating integrated wind, wave and tidal energy system. Renew. Energy 2018, 116, 412–422. [Google Scholar] [CrossRef]
- Zhao, C.; Thies, P.R.; Ye, Q.; Lars, J. System integration and coupled effects of an OWT/WEC device. Ocean Eng. 2021, 220, 108405. [Google Scholar] [CrossRef]
- Cong, P.; Teng, B.; Bai, W.; Ning, D.; Liu, Y. Wave power absorption by an oscillating water column (OWC) device of annular cross-section in a combined wind-wave energy system. Appl. Ocean Res. 2021, 107, 102499. [Google Scholar] [CrossRef]
- Si, Y.; Chen, Z.; Zeng, W.; Sun, J.; Zhang, D.; Ma, X.; Qian, P. The influence of power-take-off control on the dynamic response and power output of combined semi-submersible floating wind turbine and point-absorber wave energy converters. Ocean Eng. 2021, 227, 108835. [Google Scholar] [CrossRef]
- Li, L.; Ruzzo, C.; Collu, M.; Gao, Y.; Failla, G.; Arena, F. Analysis of the coupled dynamic response of an offshore floating multi-purpose platform for the Blue Economy. Ocean Eng. 2020, 217, 107943. [Google Scholar] [CrossRef]
- Saeidtehrani, S.; Fazeres-Ferradosa, T.; Rosa-Santos, P.; Taveira-Pinto, F. Review on floating wave-wind energy converter plants: Nonlinear dynamic assessment tools. Sustain. Energy Technol. Assess. 2022, 54, 102753. [Google Scholar] [CrossRef]
- Lee, C.F.; Ong, M.C. Combined Wind and Wave Energy System: A Review of Current Technology and State-of-the-Art Simulation Tools. In Proceedings of the 2022 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Kuala Lumpur, Malaysia, 7–10 December 2022; pp. 0665–0669. [Google Scholar]
- Dong, X.; Li, Y.; Li, D.; Cao, F.; Jiang, X.; Shi, H. A state-of-the-art review of the hybrid wind-wave energy converter. Prog. Energy 2022, 4, 042004. [Google Scholar] [CrossRef]
- Gao, Q.; Ertugrul, N.; Ding, B.; Negnevitsky, M. Offshore wind, wave and integrated energy conversion systems: A review and future. In Proceedings of the 2020 IEEE Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 November–2 December 2020; pp. 1–6. [Google Scholar]
- Wang, Y.; Zhang, L.; Michailides, C.; Wan, L.; Shi, W. Hydrodynamic Response of a Combined Wind–Wave Marine Energy Structure. J. Mar. Sci. Eng. 2020, 8, 253. [Google Scholar] [CrossRef]
- Ren, N.; Ma, Z.; Shan, B.; Ning, D.; Ou, J. Experimental and numerical study of dynamic responses of a new combined TLP type floating wind turbine and a wave energy converter under operational conditions. Renew. Energy 2020, 151, 966–974. [Google Scholar] [CrossRef]
- Yue, M.; Liu, Q.; Li, C.; Ding, Q.; Cheng, S.; Zhu, H. Effects of heave plate on dynamic response of floating wind turbine Spar platform under the coupling effect of wind and wave. Ocean Eng. 2020, 201, 107103. [Google Scholar] [CrossRef]
- Wright, C.; Pakrashi, V.; Murphy, J. Numerical modelling of a combined tension moored wind and wave energy convertor system. In Proceedings of the 12th European Wave and Tidal Energy Conference (EWTEC), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Aboutalebi, P.; Garrido, A.J.; M’zoughi, F.; Garrido, I. Stabilization of a Floating Offshore Wind Turbine Using Oscillating Water Columns. In Proceedings of the 2nd Workshop on Wind and Marine Energy (WWME), Online, 17 December 2020; pp. 75–79. [Google Scholar]
- Aboutalebi, P.; M’zoughi, F.; Martija, I.; Garrido, I.; Garrido, A.J. Switching control strategy for oscillating water columns based on response amplitude operators for floating offshore wind turbines stabilization. Appl. Sci. 2021, 11, 5249. [Google Scholar] [CrossRef]
- Lee, H.; Poguluri, S.K.; Bae, Y.H. Performance analysis of multiple wave energy converters placed on a floating platform in the frequency domain. Energies 2018, 11, 406. [Google Scholar] [CrossRef]
- Gao, Z.; Moan, T.; Wan, L.; Michailides, C. Comparative numerical and experimental study of two combined wind and wave energy concepts. J. Ocean Eng. Sci. 2016, 1, 36–51. [Google Scholar] [CrossRef]
- Muliawan, M.J.; Karimirad, M.; Gao, Z.; Moan, T. Extreme responses of a combined spar-type floating wind turbine and floating wave energy converter (STC) system with survival modes. Ocean Eng. 2013, 65, 71–82. [Google Scholar] [CrossRef]
- Li, J.; Shi, W.; Zhang, L.; Michailides, C.; Li, X. Wind–Wave Coupling Effect on the Dynamic Response of a Combined Wind–Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 1101. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Y.; Sun, W.; Li, J. Ocean wave energy converters: Technical principle, device realization, and performance evaluation. Renew. Sustain. Energy Rev. 2021, 141, 110764. [Google Scholar] [CrossRef]
- Kim, B.-H.; Wata, J.; Zullah, M.A.; Ahmed, M.R.; Lee, Y.-H. Numerical and experimental studies on the PTO system of a novel floating wave energy converter. Renew. Energy 2015, 79, 111–121. [Google Scholar] [CrossRef]
- Guo, B.; Wang, T.; Jin, S.; Duan, S.; Yang, K.; Zhao, Y. A Review of Point Absorber Wave Energy Converters. J. Mar. Sci. Eng. 2022, 10, 1534. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. A review of the technologies for wave energy extraction. Clean Energy 2018, 2, 10–19. [Google Scholar] [CrossRef]
- Al Shami, E.; Wang, X.; Zhang, R.; Zuo, L. A parameter study and optimization of two body wave energy converters. Renew. Energy 2019, 131, 1–13. [Google Scholar] [CrossRef]
- Aderinto, T.; Li, H. Review on power performance and efficiency of wave energy converters. Energies 2019, 12, 4329. [Google Scholar] [CrossRef]
- Suchithra, R.; Ezhilsabareesh, K.; Samad, A. Development of a reduced order wave to wire model of an OWC wave energy converter for control system analysis. Ocean Eng. 2019, 172, 614–628. [Google Scholar] [CrossRef]
- Falcão, A.F.d.O.; Justino, P.A.P. OWC wave energy devices with air flow control. Ocean Eng. 1999, 26, 1275–1295. [Google Scholar] [CrossRef]
- Nguyen, H.P.; Wang, C.M.; Tay, Z.Y.; Luong, V.H. Wave energy converter and large floating platform integration: A review. Ocean Eng. 2020, 213, 107768. [Google Scholar] [CrossRef]
- Martins, J.C.; Goulart, M.M.; Gomes, M.d.N.; Souza, J.A.; Rocha, L.A.O.; Isoldi, L.A.; Dos Santos, E.D. Geometric evaluation of the main operational principle of an overtopping wave energy converter by means of Constructal Design. Renew. Energy 2018, 118, 727–741. [Google Scholar] [CrossRef]
- Contestabile, P.; Crispino, G.; Di Lauro, E.; Ferrante, V.; Gisonni, C.; Vicinanza, D. Overtopping breakwater for wave Energy Conversion, Review of state of art, recent advancements and what lies ahead. Renew. Energy 2020, 147, 705–718. [Google Scholar] [CrossRef]
- Sunday, K.; Brennan, F. A review of offshore wind monopiles structural design achievements and challenges. Ocean Eng. 2021, 235, 109409. [Google Scholar] [CrossRef]
- Micallef, D.; Rezaeiha, A. Floating offshore wind turbine aerodynamics, Trends and future challenges. Renew. Sustain. Energy Rev. 2021, 152, 111696. [Google Scholar] [CrossRef]
- Yang, J.; He, Y.-P.; Zhao, Y.-S.; Shao, Y.-L.; Han, Z.-L. Experimental and numerical studies on the low-frequency responses of a spar-type floating offshore wind turbine. Ocean Eng. 2021, 222, 108571. [Google Scholar] [CrossRef]
- Ahmed, M.O.; Yenduri, A.; Kurian, V.J. Evaluation of the dynamic responses of truss spar platforms for various mooring configurations with damaged lines. Ocean Eng. 2016, 123, 411–421. [Google Scholar] [CrossRef]
- Chuang, T.-C.; Yang, W.-H.; Yang, R.-Y. Experimental and numerical study of a barge-type FOWT platform under wind and wave load. Ocean Eng. 2021, 230, 109015. [Google Scholar] [CrossRef]
- Ren, Y.; Venugopal, V.; Shi, W. Dynamic analysis of a multi-column TLP floating offshore wind turbine with tendon failure scenarios. Ocean Eng. 2022, 245, 110472. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.; Tong, J.; Xu, J. Load control of floating wind turbine on a Tension-Leg-Platform subject to extreme wind condition. Renew. Energy 2020, 151, 993–1007. [Google Scholar] [CrossRef]
- Aryai, V.; Abbassi, R.; Abdussamie, N.; Salehi, F.; Garaniya, V.; Asadnia, M.; Baksh, A.-A.; Penesis, I.; Karampour, H.; Draper, S. Reliability of multi-purpose offshore-facilities: Present status and future direction in Australia. Process Saf. Environ. Prot. 2021, 148, 437–461. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Zhou, B.; Vogel, C.; Liu, P.; Willden, R.; Sun, K.; Zang, J.; Geng, J.; Jin, P.; Cui, L. Optimal design and performance analysis of a hybrid system combing a floating wind platform and wave energy converters. Appl. Energy 2020, 269, 114998. [Google Scholar] [CrossRef]
- Karimirad, M. Combined Wave-and Wind-Power devices. In Offshore Energy Structures; Springer: Cham, Switzerland, 2014; pp. 105–128. [Google Scholar]
- Sun, K.; Yi, Y.; Zheng, X.; Cui, L.; Zhao, C.; Liu, M.; Rao, X. Experimental investigation of semi-submersible platform combined with point-absorber array. Energy Convers. Manag. 2021, 245, 114623. [Google Scholar] [CrossRef]
- Wei, Y.; Bechlenberg, A.; Van Rooij, M.; Jayawardhana, B.; Vakis, A.I. Modelling of a wave energy converter array with a non-linear power take-off system in the frequency domain. Appl. Ocean Res. 2019, 90, 101824. [Google Scholar] [CrossRef]
- Perez-Collazo, C.; Greaves, D.; Iglesias, G. Hydrodynamic response of the WEC sub-system of a novel hybrid wind-wave energy converter. Energy Convers. Manag. 2018, 171, 307–325. [Google Scholar] [CrossRef]
- Zhou, Y.; Ning, D.; Shi, W.; Johanning, L.; Liang, D. Hydrodynamic investigation on an OWC wave energy converter integrated into an offshore wind turbine monopile. Coast. Eng. 2020, 162, 103731. [Google Scholar] [CrossRef]
- Sarmiento, J.; Iturrioz, A.; Ayllón, V.; Guanche, R.; Losada, I.J. Experimental modelling of a multi-use floating platform for wave and wind energy harvesting. Ocean Eng. 2019, 173, 761–773. [Google Scholar] [CrossRef]
- Ding, S.; Han, D.; Zan, Y. The application of wave energy converter in hybrid energy system. Open Mech. Eng. J. 2014, 8, 936–940. [Google Scholar] [CrossRef]
- Moschos, E.; Manou, G.; Dimitriadis, P.; Afentoulis, V.; Koutsoyiannis, D.; Tsoukala, V.K. Harnessing wind and wave resources for a Hybrid Renewable Energy System in remote islands: A combined stochastic and deterministic approach. Energy Procedia 2017, 125, 415–424. [Google Scholar] [CrossRef]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.G.C.; Thiebaut, F.; Soares, C.G. Experimental analysis of wave energy converters concentrically attached on a floating offshore platform. Renew. Energy 2020, 152, 1171–1185. [Google Scholar] [CrossRef]
- Kallesøe, B.S. Aero-Hydro-Elastic Simulation Platform for Wave Energy Systems and Floating Wind Turbines; RISO-R-1767(EN); Technical University of Denmark: Kongens Lyngby, Denmark, 2011. Available online: https://www.osti.gov/etdeweb/biblio/1033695 (accessed on 4 April 2022).
- Chakrabarti, S.K. Hydrodynamics of Offshore Structures; Springer: Berlin/Heidelberg, Germany, 1987; ISBN 3-540-17319-6. [Google Scholar]
- Veritas, N. Environmental Conditions and Environmental Loads; Det Norske Veritas: Oslo, Norway, 2000. [Google Scholar]
- Xu, K.; Shao, Y.; Gao, Z.; Moan, T. A study on fully nonlinear wave load effects on floating wind turbine. J. Fluids Struct. 2019, 88, 216–240. [Google Scholar] [CrossRef]
- Wendt, F.F.; Robertson, A.; Jonkman, J.M.; Hayman, G. Verification of new floating capabilities in FAST v8. In Proceedings of the 33rd Wind Energy Symposium, Kissimmee, FL, USA, 5–9 January 2015; p. 1204. [Google Scholar]
- Ghafari, H.R.; Ghassemi, H.; He, G. Numerical study of the Wavestar wave energy converter with multi-point-absorber around DeepCwind semisubmersible floating platform. Ocean Eng. 2021, 232, 109177. [Google Scholar] [CrossRef]
- Papillon, L.; Costello, R.; Ringwood, J.V. Boundary element and integral methods in potential flow theory: A review with a focus on wave energy applications. J. Ocean Eng. Mar. Energy 2020, 6, 303–337. [Google Scholar] [CrossRef]
- Chung, J.S. Morison Equation in Practice and Hydrodynamic Validity. Int. J. Offshore Polar Eng. 2018, 28, 11–18. [Google Scholar] [CrossRef]
- Fish, P.R.; Dean, R.B.; Heaf, N.J. Fluid-structure interaction in Morison’s equation for the design of offshore structures. Eng. Struct. 1980, 2, 15–26. [Google Scholar] [CrossRef]
- Zan, X.; Lin, Z.; Gou, Y. Numerical study on the force distribution on cylindrical structure by internal solitary wave and its prediction with Morison equation. Ocean Eng. 2022, 248, 110701. [Google Scholar] [CrossRef]
- Avila, J.P.J.; Adamowski, J.C. Experimental evaluation of the hydrodynamic coefficients of a ROV through Morison’s equation. Ocean Eng. 2011, 38, 2162–2170. [Google Scholar] [CrossRef]
- Benitz, M.; Schmidt, D.P.; Lackner, M.; Stewart, G.; Jonkman, J.; Robertson, A. Validation of hydrodynamic load models using CFD for the OC4-DeepCwind semisubmersible. In Proceedings of the ASME 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Clement, C.; Kosleck, S.; Lie, T. Investigation of viscous damping effect on the coupled dynamic response of a hybrid floating platform concept for offshore wind turbines. Ocean Eng. 2021, 225, 108836. [Google Scholar] [CrossRef]
- Nematbakhsh, A.; Bachynski, E.E.; Gao, Z.; Moan, T. Comparison of wave load effects on a TLP wind turbine by using computational fluid dynamics and potential flow theory approaches. Appl. Ocean Res. 2015, 53, 142–154. [Google Scholar] [CrossRef]
- Liu, Y.; Yoshida, S.; Yamamoto, H.; Toyofuku, A.; He, G.; Yang, S. Response characteristics of the DeepCwind floating wind turbine moored by a single-point mooring system. Appl. Sci. 2018, 8, 2306. [Google Scholar] [CrossRef]
- Haji, M.N.; Kluger, J.M.; Sapsis, T.P.; Slocum, A.H. A symbiotic approach to the design of offshore wind turbines with other energy harvesting systems. Ocean Eng. 2018, 169, 673–681. [Google Scholar] [CrossRef]
- Wilson, J.F. Dynamics of Offshore Structures, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Jonkman, J.M. Dynamics of offshore floating wind turbines—Model development and verification. Wind Energy: Int. J. Prog. Appl. Wind Power Convers. Technol. 2009, 12, 459–492. [Google Scholar] [CrossRef]
- Such, M.; Jimenez-Octavio, J.R.; Carnicero, A.; Lopez-Garcia, O. An approach based on the catenary equation to deal with static analysis of three dimensional cable structures. Eng. Struct. 2009, 31, 2162–2170. [Google Scholar] [CrossRef]
- Kreuzer, E.; Wilke, U. Mooring systems—A multibody dynamic approach. Multibody Syst. Dyn. 2002, 8, 279–296. [Google Scholar] [CrossRef]
- Matha, D.; Schlipf, M.; Pereira, R.; Jonkman, J. Challenges in simulation of aerodynamics, hydrodynamics, and mooring-line dynamics of floating offshore wind turbines. In Proceedings of the Twenty-First International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Hall, M.; Buckham, B.; Crawford, C. Evaluating the importance of mooring line model fidelity in floating offshore wind turbine simulations. Wind Energy 2014, 17, 1835–1853. [Google Scholar] [CrossRef]
- Veritas, D.N. DNV-OS-E302: Offshore Mooring Chain; DNV: Høvik, Norway, 2015. [Google Scholar]
- Jang, H.-K.; Park, S.; Kim, M.-H.; Kim, K.-H.; Hong, K. Effects of heave plates on the global performance of a multi-unit floating offshore wind turbine. Renew. Energy 2019, 134, 526–537. [Google Scholar] [CrossRef]
- Subbulakshmi, A.; Verma, M.; Keerthana, M.; Sasmal, S.; Harikrishna, P.; Kapuria, S. Recent advances in experimental and numerical methods for dynamic analysis of floating offshore wind turbines—An integrated review. Renew. Sustain. Energy Rev. 2022, 164, 112525. [Google Scholar] [CrossRef]
- Mahmuddin, F. Rotor blade performance analysis with blade element momentum theory. Energy Procedia 2017, 105, 1123–1129. [Google Scholar] [CrossRef]
- Jeon, M.; Lee, S.; Lee, S. Unsteady aerodynamics of offshore floating wind turbines in platform pitching motion using vortex lattice method. Renew. Energy 2014, 65, 207–212. [Google Scholar] [CrossRef]
- Øye, S. Dynamic stall simulated as time lag of separation. In Proceedings of the 4th IEA Symposium on the Aerodynamics of Wind Turbines, Enea Casaccia Research Laboratory, Rome, Italy, 20–21 November 1990; p. 28. [Google Scholar]
- Snel, J.G.; Schepers, H. Joint Investigation of Dynamic Inflow Effects and Implementation of an Engineering Method. Available online: https://publications.ecn.nl/E/1995/ECN-C--94-107 (accessed on 12 June 2020).
- Du, Z.; Selig, M. A 3-D stall-delay model for horizontal axis wind turbine performance prediction. In Proceedings of the 1998 ASME Wind Energy Symposium, Reno, NV, USA, 12–15 January 1998; p. 21. [Google Scholar]
- Bhagwat, M.J.; Leishman, J.G. Rotor Aerodynamics During Maneuvering Flight Using a Time-Accurate Free-Vortex Wake. J. Am. Helicopter Soc. 2003, 48, 143–158. [Google Scholar] [CrossRef]
- Bouatem, A.; Almers, A.; Boutammachte, N. Load evaluation of horizontal-axis wind turbine rotor using coupled Beddoes near-wake model and free-wake method. Int. J. Energy Environ. Eng. 2013, 4, 35. [Google Scholar] [CrossRef]
- Chkir, S. Unsteady loads evaluation for a wind turbine rotor using free wake method. Energy Procedia 2011, 6, 777–785. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, X.; Dong, X.; Zhu, B.; Huang, D.; Zheng, Z. Numerical investigation on aerodynamic performance of a novel vertical axis wind turbine with adaptive blades. Energy Convers. Manag. 2016, 108, 275–286. [Google Scholar] [CrossRef]
- Lee, H.; Lee, D.-J. Numerical investigation of the aerodynamics and wake structures of horizontal axis wind turbines by using nonlinear vortex lattice method. Renew. Energy 2019, 132, 1121–1133. [Google Scholar] [CrossRef]
- Gabor, O.Ş.; Koreanschi, A.; Botez, R.M. A new non-linear vortex lattice method: Applications to wing aerodynamic optimizations. Chin. J. Aeronaut. 2016, 29, 1178–1195. [Google Scholar] [CrossRef]
- Li, Y.; Castro, A.M.; Sinokrot, T.; Prescott, W.; Carrica, P.M. Coupled multi-body dynamics and CFD for wind turbine simulation including explicit wind turbulence. Renew. Energy 2015, 76, 338–361. [Google Scholar] [CrossRef]
- Churchfield, M.J.; Lee, S.; Michalakes, J.; Moriarty, P.J. A numerical study of the effects of atmospheric and wake turbulence on wind turbine dynamics. J. Turbul. 2012, 13, N14. [Google Scholar] [CrossRef]
- Bhushan, S.; Walters, D.K. A dynamic hybrid Reynolds-averaged Navier Stokes–Large eddy simulation modeling framework. Phys. Fluids 2012, 24, 015103. [Google Scholar] [CrossRef]
- Heinz, S.; Mokhtarpoor, R.; Stoellinger, M. Theory-based Reynolds-averaged Navier–Stokes equations with large eddy simulation capability for separated turbulent flow simulations. Phys. Fluids 2020, 32, 065102. [Google Scholar] [CrossRef]
- Yu, G.; Shen, X.; Zhu, X.; Du, Z. An insight into the separate flow and stall delay for HAWT. Renew. Energy 2011, 36, 69–76. [Google Scholar] [CrossRef]
- Nicolle, J.; Morissette, J.F.; Giroux, A.M. Transient CFD simulation of a Francis turbine startup. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2012; Volume 15, p. 062014. [Google Scholar]
- Cheng, Z.; Wen, T.R.; Ong, M.C.; Wang, K. Power performance and dynamic responses of a combined floating vertical axis wind turbine and wave energy converter concept. Energy 2019, 171, 190–204. [Google Scholar] [CrossRef]
- Mazarakos, T.; Konispoliatis, D.; Katsaounis, G.; Polyzos, S.; Manolas, D.; Voutsinas, S.; Soukissian, T.; Mavrakos, S.A. Numerical and experimental studies of a multi-purpose floating TLP structure for combined wind and wave energy exploitation. Mediterr. Mar. Sci. 2019, 20, 745–763. [Google Scholar] [CrossRef]
- Ren, N.; Gao, Z.; Moan, T.; Wan, L. Long-term performance estimation of the Spar–Torus-Combination (STC) system with different survival modes. Ocean Eng. 2015, 108, 716–728. [Google Scholar] [CrossRef]
- Wan, L.; Gao, Z.; Moan, T.; Lugni, C. Comparative experimental study of the survivability of a combined wind and wave energy converter in two testing facilities. Ocean Eng. 2016, 111, 82–94. [Google Scholar] [CrossRef]
- Muliawan, M.J.; Karimirad, M.; Moan, T.; Gao, Z. STC (Spar-Torus Combination): A combined spar-type floating wind turbine and large point absorber floating wave energy converter—Promising and challenging. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; Volume 44946, pp. 667–676. [Google Scholar]
- Li, Q.; Michailides, C.; Gao, Z.; Moan, T. A comparative study of different methods for predicting the long-term extreme structural responses of the combined wind and wave energy concept semisubmersible wind energy and flap-type wave energy converter. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 85–96. [Google Scholar] [CrossRef]
- Michailides, C.; Gao, Z.; Moan, T. Response analysis of the combined wind/wave energy concept SFC in harsh environmental conditions. In Proceedings of the RENEW2014 1st International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014. [Google Scholar]
- Luan, C.; Michailides, C.; Gao, Z.; Moan, T. Modeling and analysis of a 5 MW semi-submersible wind turbine combined with three flap-type wave energy converters. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; Volume 45547, p. V09BT09A028. [Google Scholar]
- Karimirad, M.; Koushan, K. WindWEC: Combining wind and wave energy inspired by hywind and wavestar. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 96–101. [Google Scholar]
- Aboutalebi, P.; M’zoughi, F.; Garrido, I.; Garrido, A.J. Performance analysis on the use of oscillating water column in barge-based floating offshore wind turbines. Mathematics 2021, 9, 475. [Google Scholar] [CrossRef]
- Mitra, A.; Sarkar, S.; Chakraborty, A.; Das, S. Sway vibration control of floating horizontal axis wind turbine by modified spar-torus combination. Ocean Eng. 2021, 219, 108232. [Google Scholar] [CrossRef]
- Hanssen, J.E.; Margheritini, L.; O’sullivan, K.; Mayorga, P.; Martinez, I.; Arriaga, A.; Agos, I.; Steynor, J.; Ingram, D.; Hezari, R. Design and performance validation of a hybrid offshore renewable energy platform. In Proceedings of the 2015 IEEE Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–8. [Google Scholar]
- Bachynski, E.E.; Moan, T. Point absorber design for a combined wind and wave energy converter on a tension-leg support structure. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 9–14 June 2013; Volume 55423, p. V008T09A025. [Google Scholar]
- Chen, W.; Gao, F.; Meng, X.; Chen, B.; Ren, A. W2P: A high-power integrated generation unit for offshore wind power and ocean wave energy. Ocean Eng. 2016, 128, 41–47. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.; Sun, J.; Tan, M.; Yang, S.; Ying, Y.; Qian, P.; Zhang, D.; Si, Y. Load Reduction of Semi-Submersible Floating Wind Turbines by Integrating Heaving-Type Wave Energy Converters with Bang-Bang Control. Front. Energy Res. 2022, 10, 929307. [Google Scholar] [CrossRef]
- Li, L.; Yuan, Z.; Gao, Y. Dynamic response and power production of an integrated offshore renewable energy system. In Proceedings of the 28th International Ocean and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Li, L.; Cheng, Z.; Yuan, Z.; Gao, Y. Short-term extreme response and fatigue damage of an integrated offshore renewable energy system. Renew. Energy 2018, 126, 617–629. [Google Scholar] [CrossRef]
- Ren, N.; Ma, Z.; Fan, T.; Zhai, G.; Ou, J. Experimental and numerical study of hydrodynamic responses of a new combined monopile wind turbine and a heave-type wave energy converter under typical operational conditions. Ocean Eng. 2018, 159, 1–8. [Google Scholar] [CrossRef]
- Li, Y.; Ong, M.C.; Wang, K.; Li, L.; Cheng, Z. Power performance and dynamic responses of an integrated system with a semi-submersible wind turbine and four torus-shaped wave energy converters. Ocean Eng. 2022, 259, 111810. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Zhai, Y.; Xu, C.; Zhao, H.; Wang, W.; Li, X. Dynamic Analysis of an Integrated Floating Structure Consisting of a Barge Offshore Wind Turbine with an Aquaculture Cage. In Proceedings of the 32nd International Ocean and Polar Engineering Conference, Shanghai, China, 5–10 June 2022. [Google Scholar]
- Cheng, Z.; Madsen, H.A.; Gao, Z.; Moan, T. A fully coupled method for numerical modeling and dynamic analysis of floating vertical axis wind turbines. Renew. Energy 2017, 107, 604–619. [Google Scholar] [CrossRef]
- Oguz, E.; Clelland, D.; Day, A.H.; Incecik, A.; López, J.A.; Sánchez, G.; Almeria, G.G. Experimental and numerical analysis of a TLP floating offshore wind turbine. Ocean Eng. 2018, 147, 591–605. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Li, C.; Wang, J. Investigation on mooring breakage effects of a 5 MW barge-type floating offshore wind turbine using F2A. Ocean Eng. 2021, 233, 108887. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Michailides, C.; Li, C.; Wang, J. Development and application of an aero-hydro-servo-elastic coupling framework for analysis of floating offshore wind turbines. Renew. Energy 2020, 161, 606–625. [Google Scholar] [CrossRef]
- Nielsen, F.G.; Hanson, T.D.; Skaare, B. Integrated Dynamic Analysis of Floating Offshore Wind Turbines. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 671–679. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Published Time | Research Content | |||
|---|---|---|---|---|---|
| Hybrid Concepts | Numerical Calculation Tools | Environmental Load Assessment Methodology | Detailed Coupling Simulation Methods | ||
| [17] | 2022 | ● | ● | ||
| [18] | 2022 | ● | ● | ||
| [19] | 2022 | ● | ● | ||
| [10] | 2020 | ● | |||
| [20] | 2020 | ● | |||
| This Review | — | ● | ● | ● | ● |
| Hydrodynamics | Structural Dynamics | Aerodynamics |
|---|---|---|
| Morrison Equation (ME) | Dynamic Analysis Theory (Dyn) | Blade Element Momentum Theory (BEM) |
| Potential Flow Theory (PF) | Finite Element Method (FEM) | Vortex Wake Method (VWM) |
| Computational Fluid Dynamics (CFD) | Quasi-Static Method (QS) | Computational Fluid Dynamics (CFD) |
| Name of the Device | Structural Form | Simulation Solution |
|---|---|---|
| A 5-MW braceless wind turbine with a heave-type WEC [21] | Semi + Heave-type WEC | ANSYS AQWA + External dynamic link library |
| DWC (DeepCwind-Wavestar-Combined) [15] | Semi + OB | ANSYS AQWA + External dynamic link library |
| A system of three identical OWC devices and TLP [103] | TLP + OWC | In-house code (HAMVAB) + hGAST |
| STC (Spar-Torus Combination) [28,29,104,105,106] | Spar + Torus-shaped WEC | HydroD + SIMO + Mean constant thrust load/RIFLEX + SIMO + Aerodyn |
| A hybrid wind-wave energy concept includes WECs by point-absorbers and DeepCwind [65] | Semi + OB | Only ANSYS AQWA |
| SFC [28,107,108,109] | Semi + Flap-type WEC | RIFLEX + SIMO + Aerodyn |
| WindWEC [110] | Semi + OB | RIFLEX + SIMO + WAMIT |
| Barge-based floating offshore wind turbine with four OWCs [111] | Barge + OWC | WAMIT + FAST |
| TWWC((TLP-WT-WEC-Combination) [22] | TLP + Heave-type WEC | ANSYS AQWA + Equivalent thrust and torque loading |
| The coupled concept of the OWT and the heaving buoy WEC [13,26] | OWT + Heaving buoy WEC | ANSYS AQWA + OrcaFlex |
| A combined concept combing a heave-type WEC with a semisubmersible floating wind turbine [30] | Semi + Heave-type WEC | F2A (ANSYS AQWA + FAST) |
| A conceptual 10 MW-class wave-offshore wind hybrid power generation system [27] | Semi + OB | HARP-CHARM3D-WAMIT |
| MSTC (Modified Spar-torus Combination) [112] | Spar + Torus-type WEC | A self-developed mathematical model based on Matlab + Turbsim + FAST |
| TWindWave [24] | TLP + OB | OrcaFlex + ANSYS AQWA |
| MPP (Multi-Purpose Platform) [16] | TLP + OWC | RIFLEX + SIMO + WADAM\ANSYS AQWA |
| W2power [113] | Semi + OB | RIFLEX + SIMO |
| TLPWT with 3-point absorber WECs with hinged guides [114] | TLP + OB | SIMO + RIFLEX + Aerodyn |
| A high-power integrated generation unit for offshore wind power and ocean wave energy (W2P) [115] | Semi + OB | OnlyANSYS AQWA |
| The coupled concept of the barge platform and OWC [25] | Barge + OWC | WAMIT + FAST |
| A novel hybrid wind-wave energy platform consisting of a semi-submersible FOWT and three heaving-type WECs [116] | Semi + Heaving-type WEC | F2A (FAST + ANSYS AQWA) |
| HWNC (Hywind-Wavebob-NACA Combination) [12,117,118] | Spar + Heaving-type WEC | Wind-SKLOE + WEC-Sim |
| MWWC (Monopile-WT-WEC- Combination) [119] | Monopile + Heave-type WEC | ANSYS AQWA + Aerodyn |
| CTC (CSC-torus-combination) [120] | Semi + Torus-shaped WEC | HydroD + SIMO + RIFLEX |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, F.; Yu, M.; Liu, B.; Wei, Z.; Xue, L.; Han, M.; Shi, H. Progress of Combined Wind and Wave Energy Harvesting Devices and Related Coupling Simulation Techniques. J. Mar. Sci. Eng. 2023, 11, 212. https://doi.org/10.3390/jmse11010212
Cao F, Yu M, Liu B, Wei Z, Xue L, Han M, Shi H. Progress of Combined Wind and Wave Energy Harvesting Devices and Related Coupling Simulation Techniques. Journal of Marine Science and Engineering. 2023; 11(1):212. https://doi.org/10.3390/jmse11010212
Chicago/Turabian StyleCao, Feifei, Mingqi Yu, Bing Liu, Zhiwen Wei, Lei Xue, Meng Han, and Hongda Shi. 2023. "Progress of Combined Wind and Wave Energy Harvesting Devices and Related Coupling Simulation Techniques" Journal of Marine Science and Engineering 11, no. 1: 212. https://doi.org/10.3390/jmse11010212
APA StyleCao, F., Yu, M., Liu, B., Wei, Z., Xue, L., Han, M., & Shi, H. (2023). Progress of Combined Wind and Wave Energy Harvesting Devices and Related Coupling Simulation Techniques. Journal of Marine Science and Engineering, 11(1), 212. https://doi.org/10.3390/jmse11010212