
Virtual Underwater Datasets for Autonomous Inspections



Abstract
:1. Introduction
Related Work
2. Methods for Data Capture and Processing
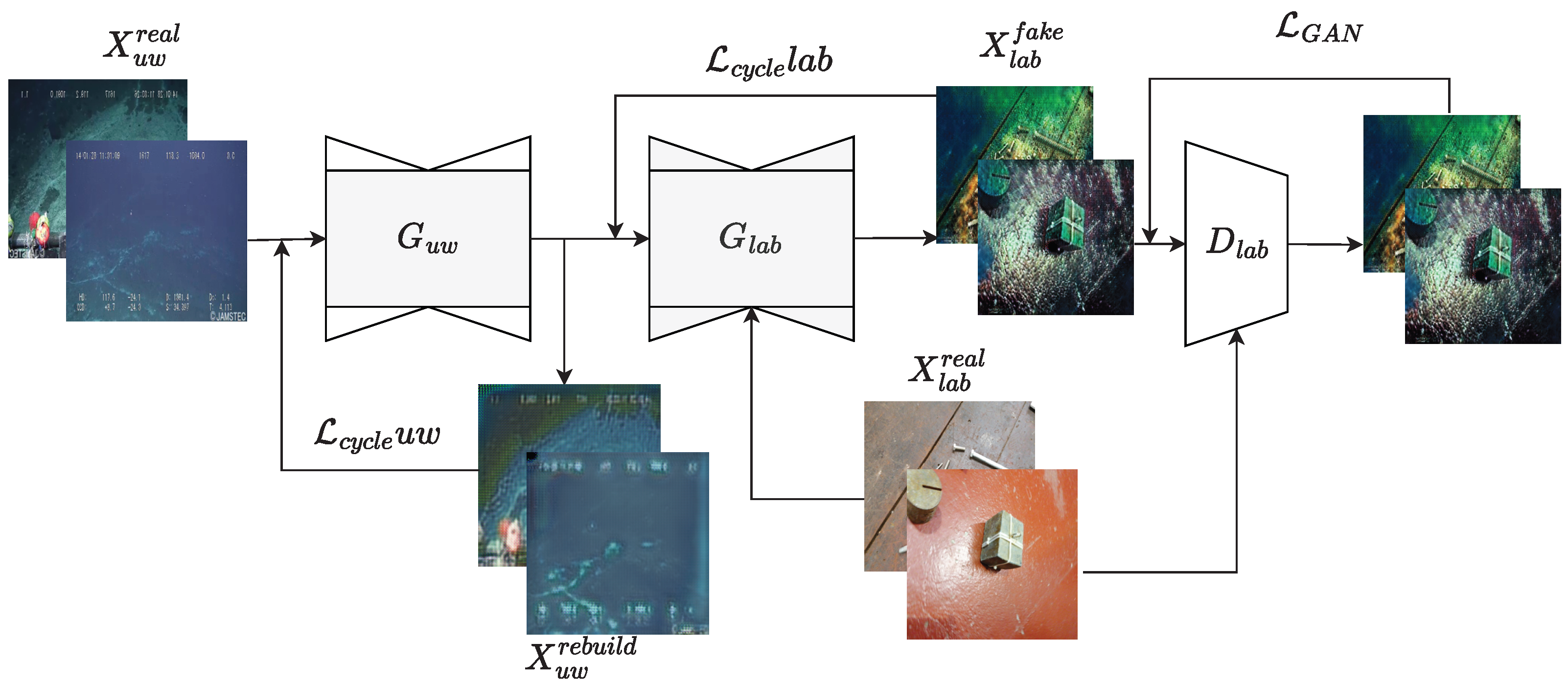
2.1. Formulation of the Proposed Method
2.2. Cycle Consistency Loss
2.3. Dataset
2.4. Data Augmentation
2.5. Deep Learning Augmentation
2.6. Image Classification
2.7. Object Detection
3. Results
3.1. Model Evaluation
3.2. Object Detection
3.2.1. YOLO v1
3.2.2. YOLO v4
- 50% probability of horizontal flip.
- Random Gaussian blur between 0 and 1.25 pixels.
- Salt-and-pepper noise was applied to 8 per cent of pixels.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence. |
| AUVs | Autonomous Underwater Vehicles. |
| CNN | Convolutional Neural Network. |
| CV | Computer Vision. |
| DL | Deep Learning. |
| DNN | Deep Neural Networks. |
| EM | Electron Microscopy. |
| GANs | Generative Adversarial Networks. |
| HPC | High Performance Computing. |
| ROVs | Remote Operated Vehicles. |
| UWCycleGAN | UnderWaterCycleGAN. |
| Real-world underwater environment image. | |
| Reconstructed real world underwater environment image. | |
| Laboratory image. | |
| Artificial underwater image. | |
| Underwater environment generator. | |
| Laboratory environment generator. |
References
- Ridolfi, A.; Conti, R.; Costanzi, R.; Fanelli, F.; Meli, E. A Dynamic Manipulation Strategy for an Intervention Autonomous Underwater Vehicle. Adv. Robot. Autom. 2015, 4. [Google Scholar] [CrossRef]
- Corchs, S.; Schettini, R. Underwater Image Processing: State of the Art of Restoration and Image Enhancement Methods; Hindawi Publishing Corporation: London, UK, 2010; Volume 14. [Google Scholar] [CrossRef]
- Han, F.; Yao, J.; Zhu, H.; Wang, C. Underwater Image Processing and Object Detection Based on Deep CNN Method. J. Sens. 2020, 2020, 6707328. [Google Scholar] [CrossRef]
- Cazzato, D.; Cimarelli, C.; Sanchez-Lopez, J.L.; Voos, H.; Leo, M. A Survey of Computer Vision Methods for 2D Object Detection from Unmanned Aerial Vehicles. J. Imaging 2020, 6, 78. [Google Scholar] [CrossRef]
- Chen, L.; Tong, L.; Zhou, F.; Jiang, Z.; Li, Z.; Lv, J.; Dong, J.; Zhou, H. A Benchmark dataset for both underwater image enhancement and underwater object detection. arXiv 2020, arXiv:2006.15789. [Google Scholar]
- Xu, Z.; Haroutunian, M.; Murphy, A.J.; Neasham, J.; Norman, R. An Underwater Visual Navigation Method Based on Multiple ArUco Markers. J. Mar. Sci. Eng. 2021, 9, 1432. [Google Scholar] [CrossRef]
- Yang, H.; Xu, Z.; Jia, B. An Underwater Positioning System for UUVs Based on LiDAR Camera and Inertial Measurement Unit. Sensors 2022, 22, 5418. [Google Scholar] [CrossRef]
- Ludvigsen, M.; Sørensen, A.J. Towards Integrated Autonomous Underwater Operations for Ocean Mapping and Monitoring. Annu. Rev. Control. 2016, 42, 145–157. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. arXiv 2014, arXiv:1311.2524. [Google Scholar]
- Girshick, R. Fast R-CNN. arXiv 2015, arXiv:1504.08083. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. arXiv 2017, arXiv:1703.06870. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; IEEE Computer Society: Washington, DC, USA, 2016; Volume 2016, pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Bochkovskiy, A.; Wang, C.-Y.; Mark Liao, H.-Y. Yolo v4, v3 and v2 for Windows and Linux. Versions 2, 3 and 4. 2021. Available online: https://github.com/AlexeyAB/darknet (accessed on 19 August 2022).
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. arXiv 2017, arXiv:1612.03144. [Google Scholar] [CrossRef]
- Perez, L.; Wang, J. The Effectiveness of Data Augmentation in Image Classification Using Deep Learning. arXiv 2017, arXiv:1712.04621. [Google Scholar]
- Buslaev, A.; Parinov, A.; Khvedchenya, E.; Iglovikov, V.I.; Kalinin, A.A. Albumentations: Fast and flexible image augmentations. Information 2020, 11, 125. [Google Scholar] [CrossRef]
- Riba, E.; Mishkin, D.; Ponsa, D.; Rublee, E.; Bradski, G. Kornia: An open source differentiable computer vision library for pytorch. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2020; pp. 3674–3683. [Google Scholar]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Networks. arXiv 2014, arXiv:1406.2661. [Google Scholar] [CrossRef]
- Park, J.; Han, D.K.; Ko, H. Adaptive Weighted Multi-Discriminator CycleGAN for Underwater Image Enhancement. J. Mar. Sci. Eng. 2019, 7, 200. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Li, J.; Skinner, K.A.; Eustice, R.M.; Johnson-Roberson, M. WaterGAN: Unsupervised Generative Network to Enable Real-time Color Correction of Monocular Underwater Images. IEEE Robot. Autom. Lett. 2017, 3, 387–394. [Google Scholar] [CrossRef]
- Anwar, S.; Li, C.; Porikli, F. Deep Underwater Image Enhancement. arXiv 2018, arXiv:1807.03528. [Google Scholar]
- Berman, D.; Avidan, S. Diving into Haze-Lines: Color Restoration of Underwater Images. In Proceedings of the British Machine Vision Conference (BMVC 2017), London, UK, 4–7 September 2017. [Google Scholar]
- Arnold-Bos, A.; Malkasse, J.P.; Kervern, G. A preprocessing framework for automatic underwater images denoising. In Proceedings of the European Conference on Propagation and Systems, Copenhagen, Denmark, 15–20 March 2020. [Google Scholar]
- Sandfort, V.; Yan, K.; Pickhardt, P.J.; Summers, R.M. Data augmentation using generative adversarial networks (CycleGAN) to improve generalizability in CT segmentation tasks. Sci. Rep. 2019, 9, 16884. [Google Scholar] [CrossRef]
- Fakhry, A.; Peng, H.; Ji, S. Deep models for brain EM image segmentation: Novel insights and improved performance. Bioinformatics 2016, 32, 2352–2358. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. arXiv 2015, arXiv:1409.4842. [Google Scholar] [CrossRef]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Geirhos, R.; Janssen, D.H.J.; Schütt, H.H.; Rauber, J.; Bethge, M.; Wichmann, F.A. Comparing deep neural networks against humans: Object recognition when the signal gets weaker. arXiv 2018, arXiv:1706.06969. [Google Scholar]
- Chen, X.; Zhang, P.; Quan, L.; Yi, C.; Lu, C. Underwater Image Enhancement based on Deep Learning and Image Formation Model. arXiv 2021, arXiv:2101.00991. [Google Scholar]
- Li, H.; Li, J.; Wang, W. A Fusion Adversarial Underwater Image Enhancement Network with a Public Test Dataset. arXiv 2019, arXiv:1906.06819. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2016, arXiv:1512.03385. [Google Scholar]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An Underwater Image Enhancement Benchmark Dataset and Beyond. IEEE Trans. Image Process. 2019, 29, 4376–4389. [Google Scholar] [CrossRef] [Green Version]
- Panetta, K.; Kezebou, L.; Oludare, V.; Agaian, S. Comprehensive Underwater Object Tracking Benchmark Dataset and Underwater Image Enhancement With GAN. IEEE J. Ocean Eng. 2021, 47, 59–75. [Google Scholar] [CrossRef]
- Han, J.; Shoeiby, M.; Malthus, T.; Botha, E.; Anstee, J.; Anwar, S.; Wei, R.; Armin, M.A.; Li, H.; Petersson, L. Underwater Image Restoration via Contrastive Learning and a Real-world Dataset. Remote Sens. 2022, 14, 4297. [Google Scholar] [CrossRef]
- He, K.; Fan, H.; Wu, Y.; Xie, S.; Girshick, R. Momentum Contrast for Unsupervised Visual Representation Learning. arXiv 2020, arXiv:1911.05722. [Google Scholar] [CrossRef]
- Li, C.; Anwar, S.; Porikli, F. Underwater Scene Prior Inspired Deep Underwater Image and Video Enhancement. Pattern Recognit. 2020, 98, 107038. [Google Scholar] [CrossRef]
- Islam, M.J.; Enan, S.S.; Luo, P.; Sattar, J. Underwater image super-resolution using deep residual multipliers. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 900–906. [Google Scholar]
- Japan Agency for Marine-Earth Science and Technology. Deep-Sea Debris Database JAMSTEC; JAMSTEC: Kanagawa, Japan, 2021.
- Md Jahidul, I.; Peigen, L.; Junaed, S. The UFO-120 Dataset; Interactive Robotics and Vision Lab.: Minneapolis, MN, USA, 2022. [Google Scholar]
- Heusel, M.; Ramsauer, H.; Unterthiner, T.; Nessler, B.; Hochreiter, S. GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium. arXiv 2018, arXiv:1706.08500. [Google Scholar]
- Goodfellow, I. NIPS 2016 Tutorial: Generative Adversarial Networks. arXiv 2016, arXiv:1701.00160. [Google Scholar]
- Wu, H.; Gu, X. Max-pooling dropout for regularization of convolutional neural networks. In Proceedings of the International Conference on Neural Information Processing, Istanbul, Turkey, 9–12 November 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 46–54. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Brownlee, J. How to Implement the Frechet Inception Distance (FID) for Evaluating GANs. Retrieved Dec. 2019, 5, 2019. [Google Scholar]
- Seitzer, M. Pytorch-Fid: FID Score for PyTorch. Version 0.2.1. 2020. Available online: https://github.com/mseitzer/pytorch-fid (accessed on 19 August 2022).
- MAST Maritime Services, S.A. Underwater Services. 2021. Available online: https://mastms.gr/ (accessed on 19 August 2022).
- Vincent, P.; Larochelle, H.; Lajoie, I.; Bengio, Y.; Manzagol, P.A. Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 19 August 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Images | Number of Objects | |
|---|---|---|
| First set | 300 | 2372 |
| Second set | 250 | 2328 |
| Total set | 550 | 4700 |
| Layer | Filters | Output |
|---|---|---|
| Input image | 3 | 150 × 150 |
| Convolutional | 16 | 150 × 150 |
| Max Pooling | 16 | 75 × 75 |
| Convolutional | 32 | 75 × 75 |
| Max Pooling | 32 | 37 × 37 |
| Convolutional | 64 | 37 × 37 |
| Max Pooling | 64 | 18 × 18 |
| Flatten | 20,736 | 18 × 18 |
| Dense | 128 | 18 × 18 |
| Dense | 5 | 18 × 18 |
| Softmax | Prediction | |
| CycleGAN | Dataset Size | Image Size | Hardware | RAM Usage | Training Time | Batch Size | Learning Rate |
|---|---|---|---|---|---|---|---|
| Full Image | 2670 | 256 × 256 | Tesla V100 | 14.2 GB | 18 h | 4 | |
| Object Image | 4700 | 128 × 128 | Tesla V100 | 15.0 GB | 22 h | 8 |
| FID Score | vs. | vs. | vs. | vs. | vs. | vs. | |
|---|---|---|---|---|---|---|---|
| UWCycleGAN | Full Image | 301.05 | 21.92 | 20.31 | 11.93 | 7.38 | 42.12 |
| Object Image | 326.10 | 29.19 | 36.79 | 20.58 | 15.90 | - | |
| Classical Augnentation | - | - | 174.26 | 212.91 | - | - | - |
| Object Detection | Dataset Size | Image Size | Hardware | RAM Usage | Training Time | Batch Size | Learning Rate |
|---|---|---|---|---|---|---|---|
| YOLO v1 | 1128 | 416 × 416 | Tesla V100 | 4.2 GB | 3.8 h | 16 | 0.01 |
| YOLO v4 | 1128 | 416 × 416 | Tesla V100 | 2.1 GB | 1 h | 16 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Polymenis, I.; Haroutunian, M.; Norman, R.; Trodden, D. Virtual Underwater Datasets for Autonomous Inspections. J. Mar. Sci. Eng. 2022, 10, 1289. https://doi.org/10.3390/jmse10091289
Polymenis I, Haroutunian M, Norman R, Trodden D. Virtual Underwater Datasets for Autonomous Inspections. Journal of Marine Science and Engineering. 2022; 10(9):1289. https://doi.org/10.3390/jmse10091289
Chicago/Turabian StylePolymenis, Ioannis, Maryam Haroutunian, Rose Norman, and David Trodden. 2022. "Virtual Underwater Datasets for Autonomous Inspections" Journal of Marine Science and Engineering 10, no. 9: 1289. https://doi.org/10.3390/jmse10091289
APA StylePolymenis, I., Haroutunian, M., Norman, R., & Trodden, D. (2022). Virtual Underwater Datasets for Autonomous Inspections. Journal of Marine Science and Engineering, 10(9), 1289. https://doi.org/10.3390/jmse10091289