

Numerical Research of the Pressure Fluctuation of the Bow of the Submarine at Different Velocities

Abstract
:1. Introduction
2. Numerical Simulation Methods
3. Numerical Simulation of Submarine
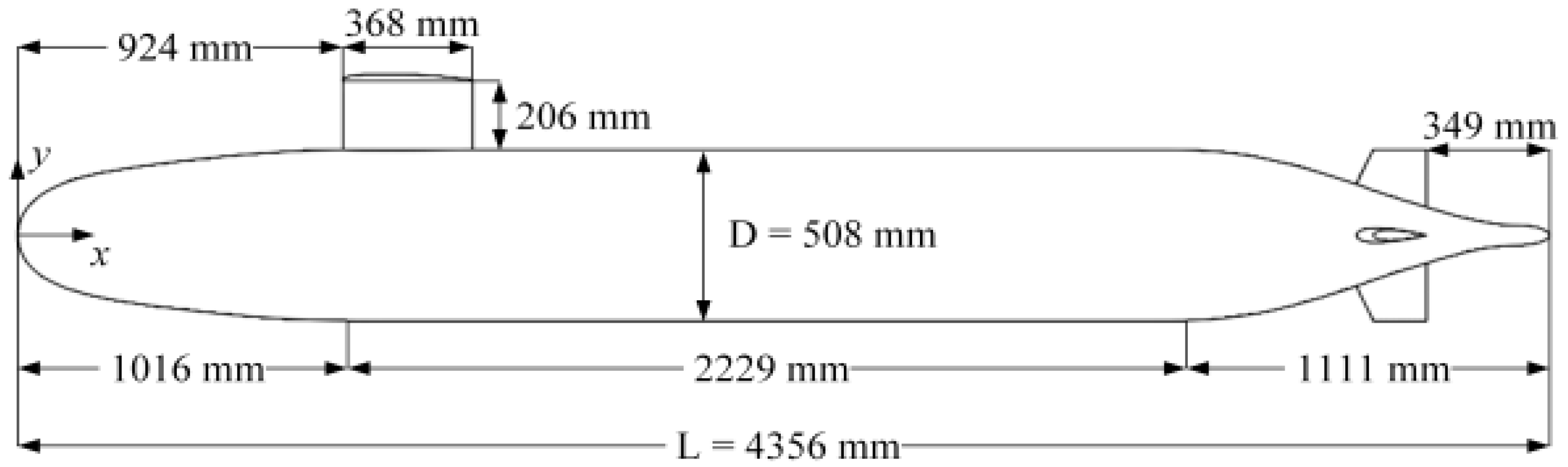
3.1. Model Geometry
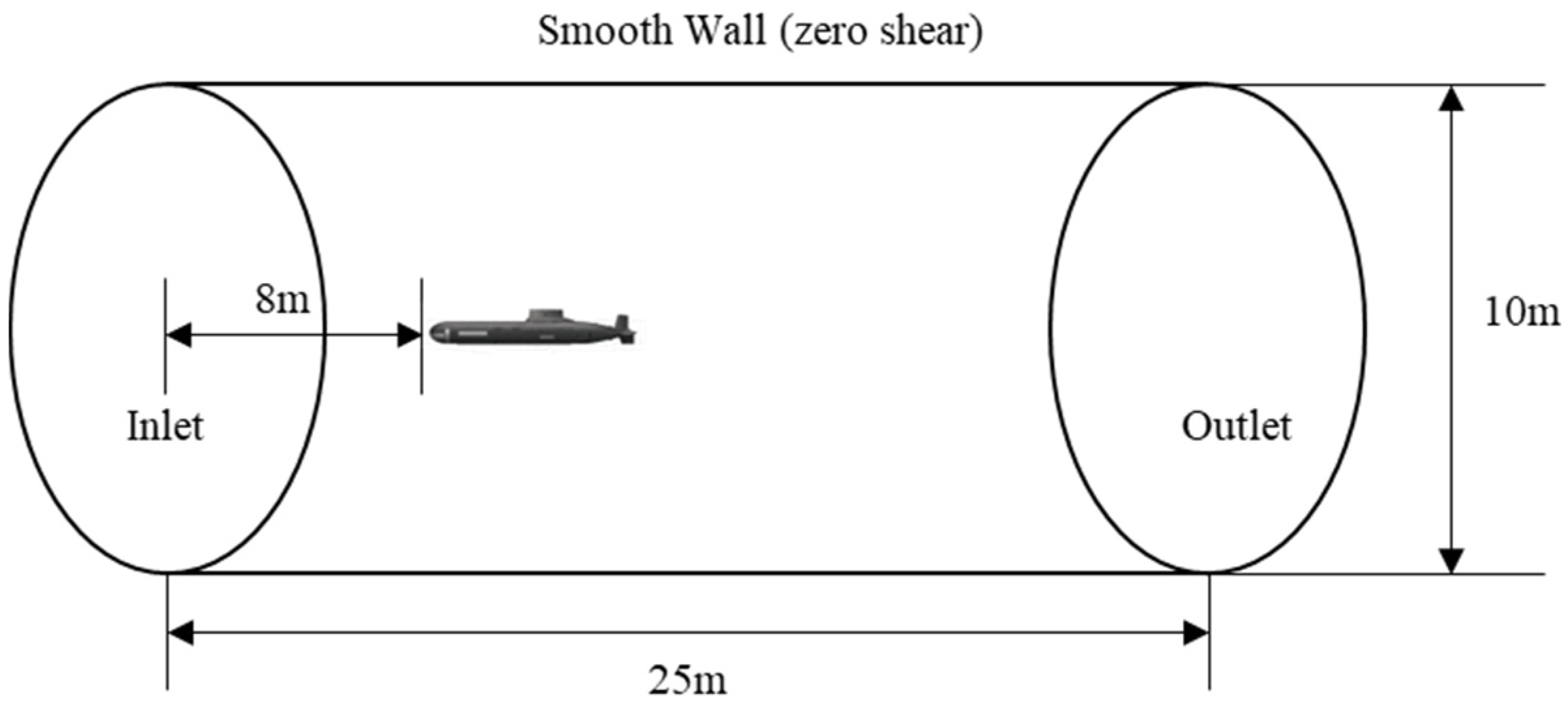
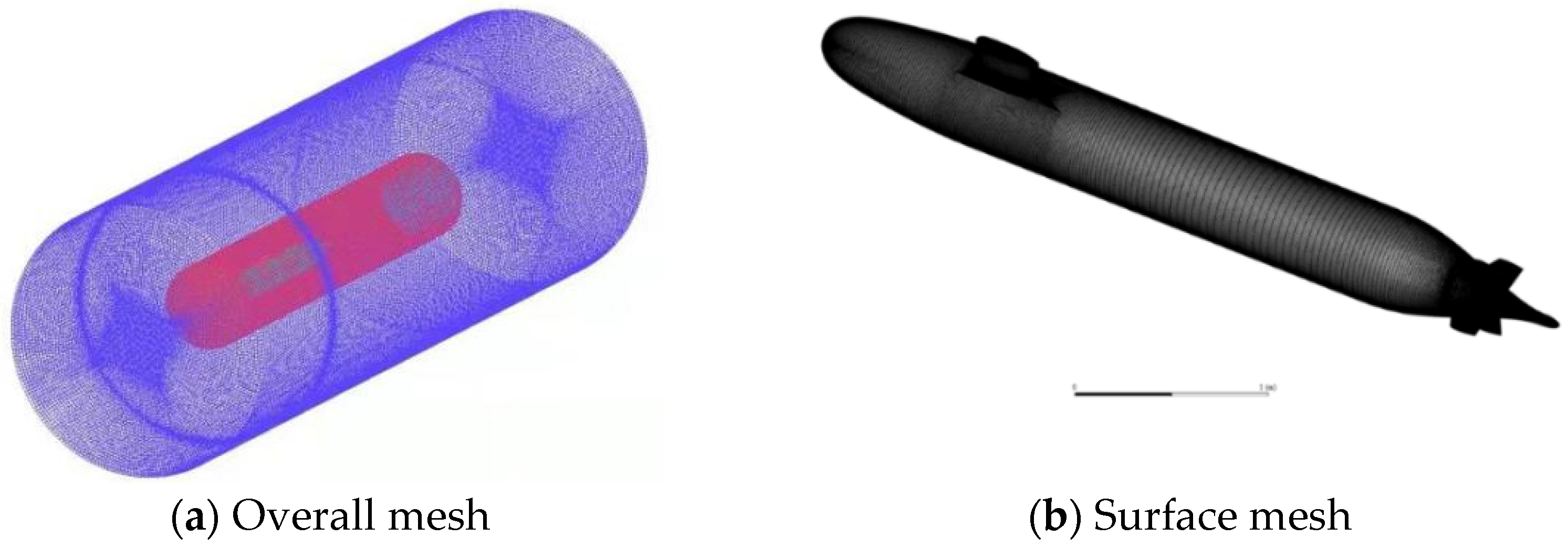
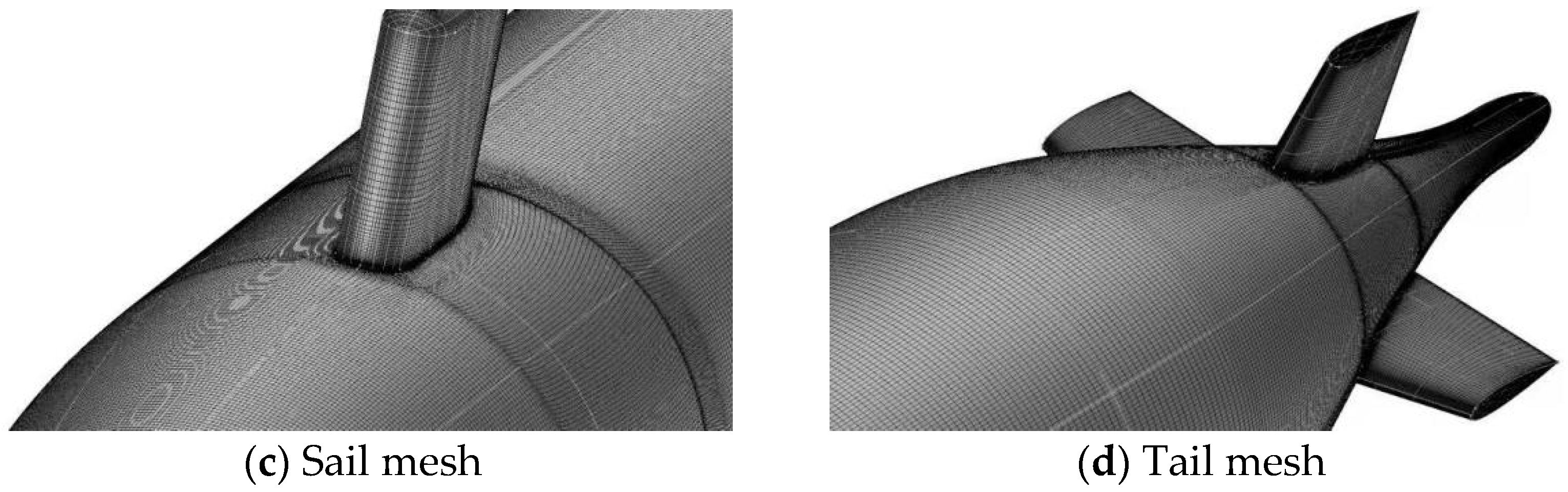
3.2. Mesh and Numerical Setup
3.3. Verification of Mesh
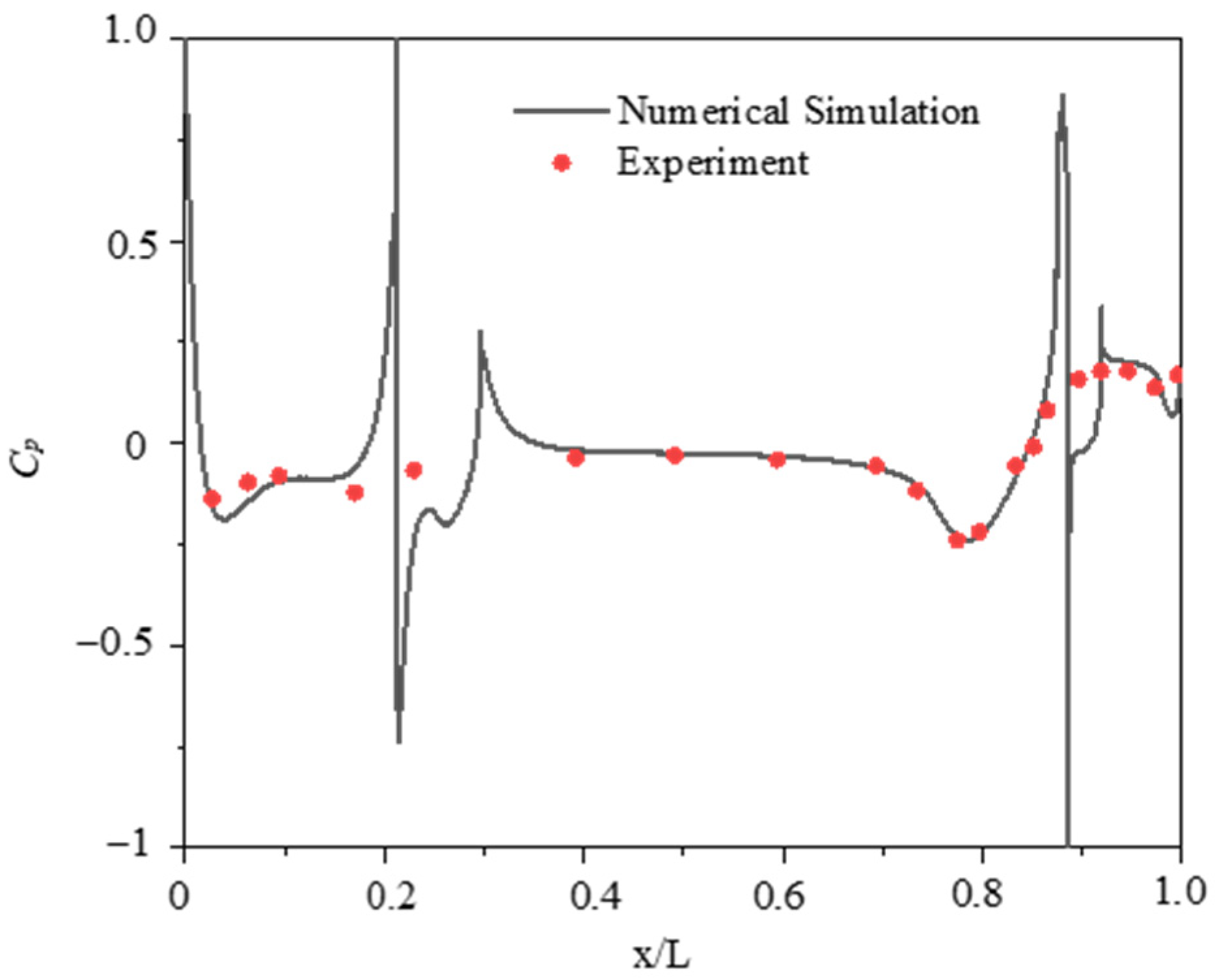
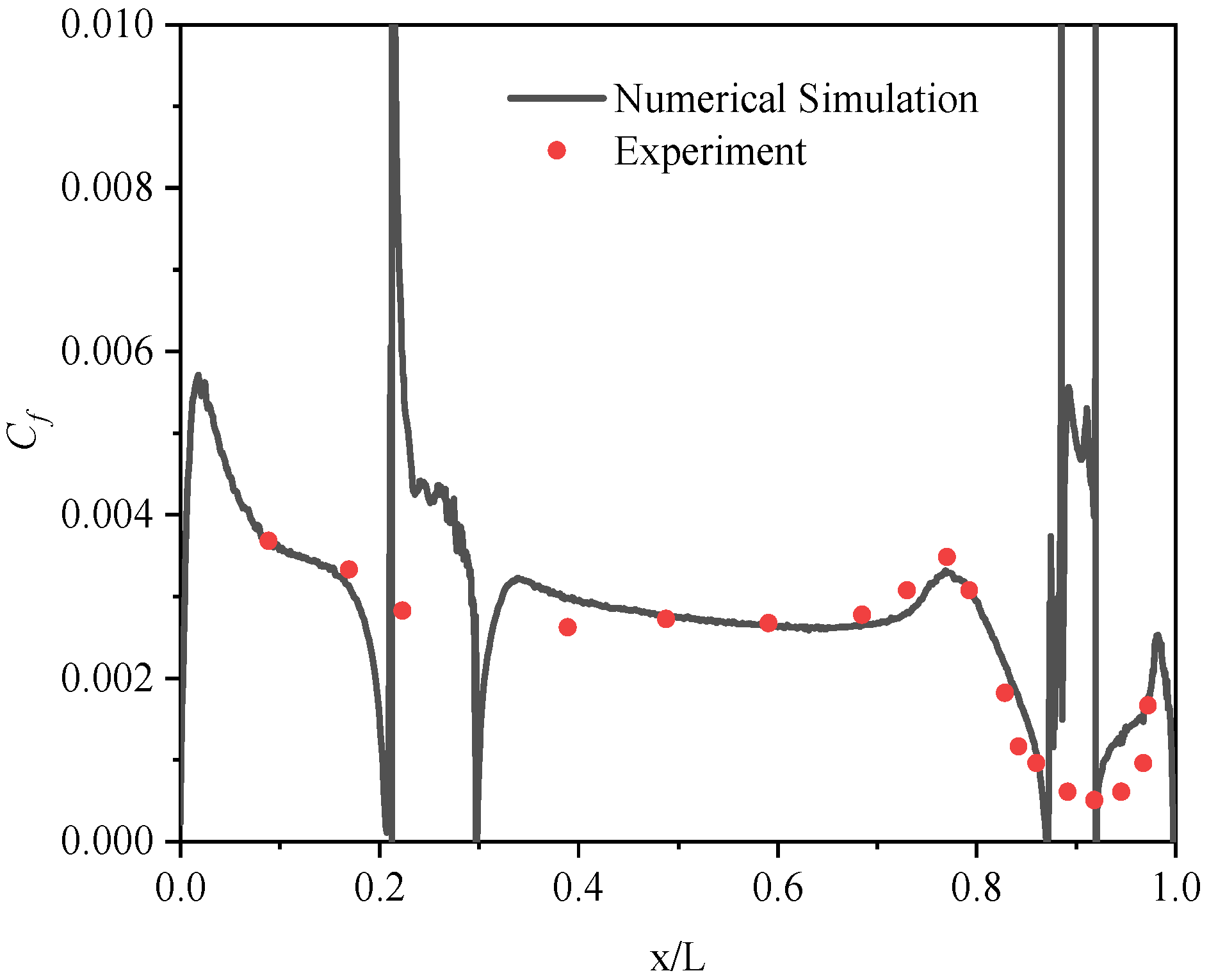
3.4. Verification of Numerical Method
4. Results and Discussion
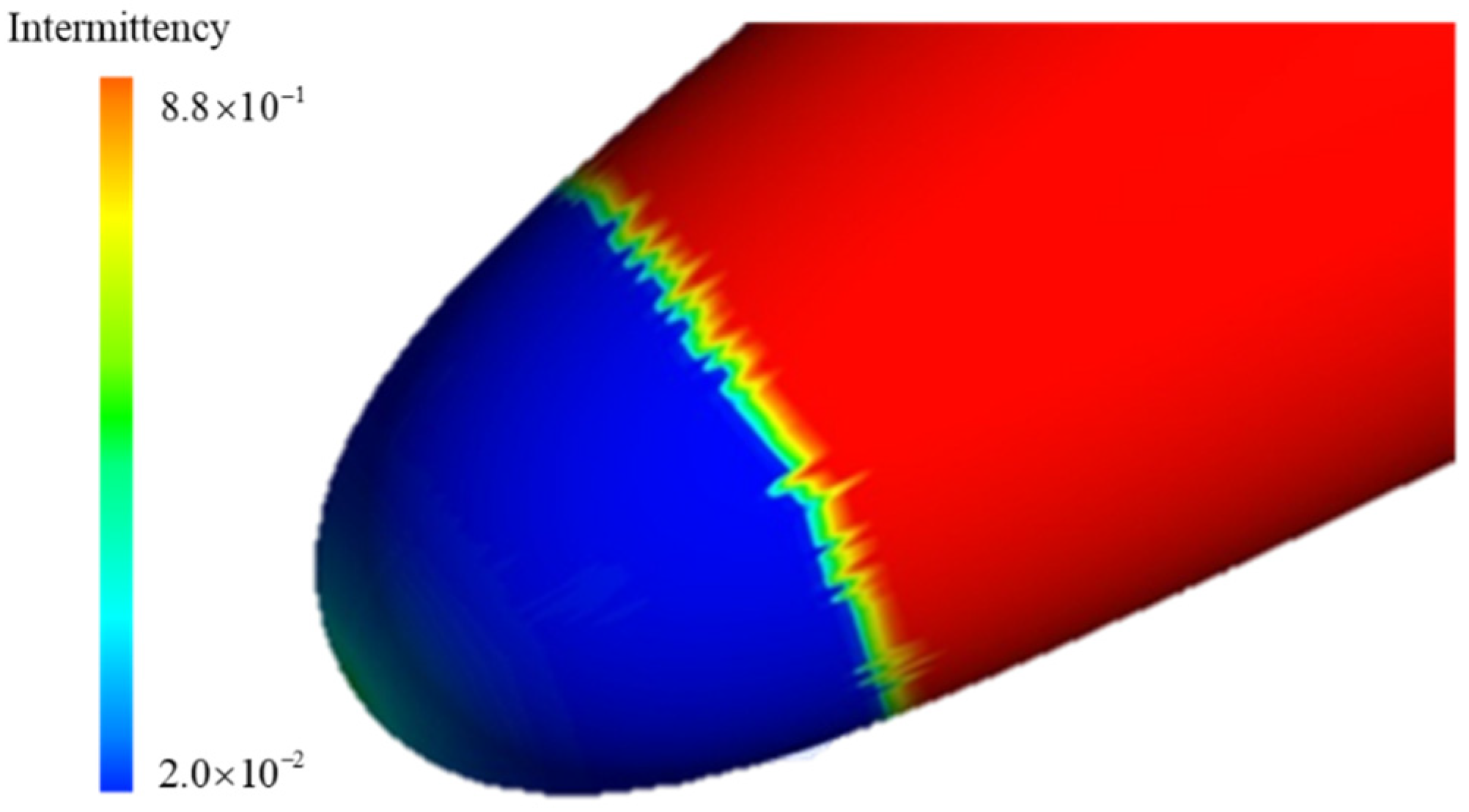
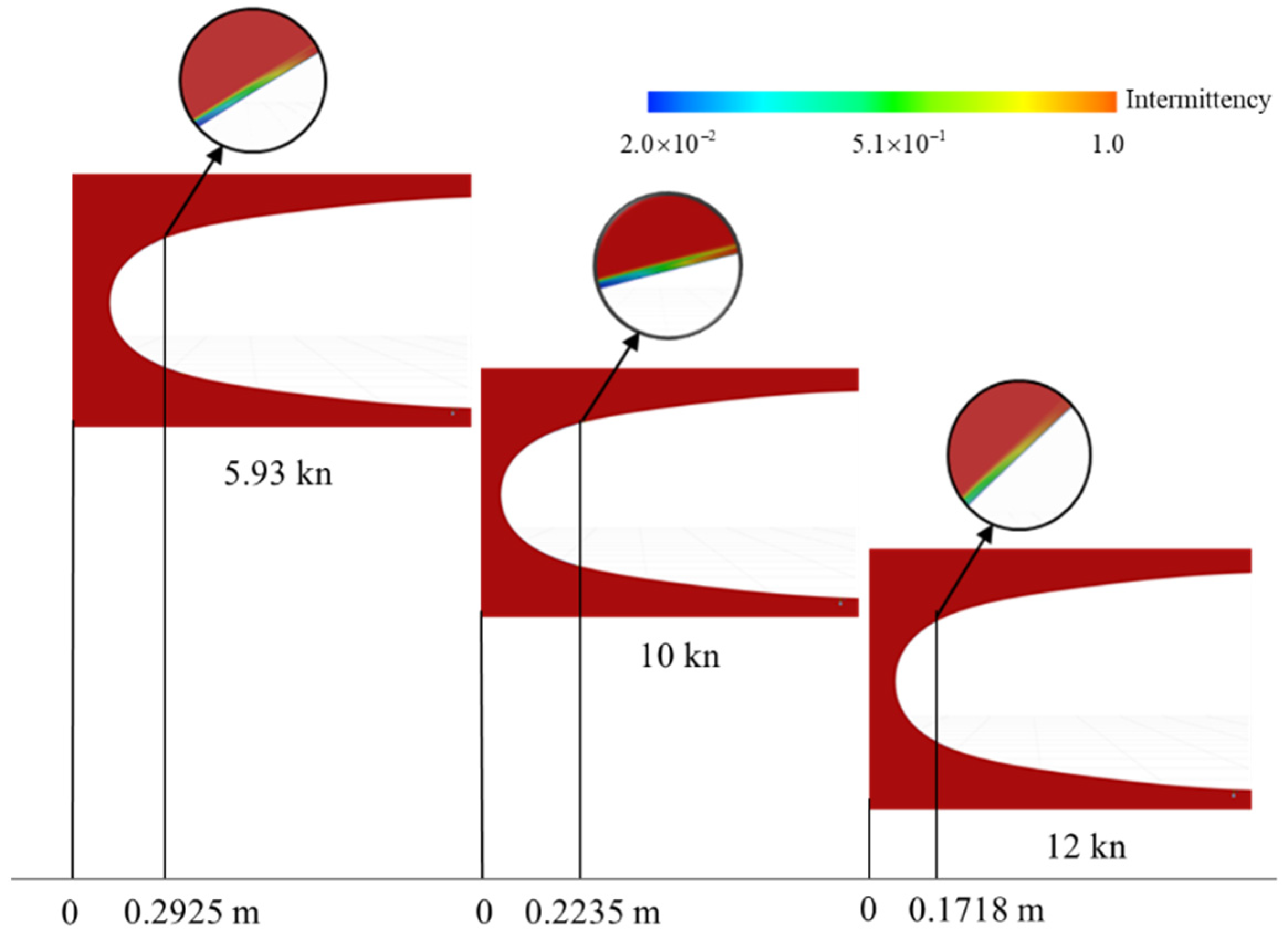
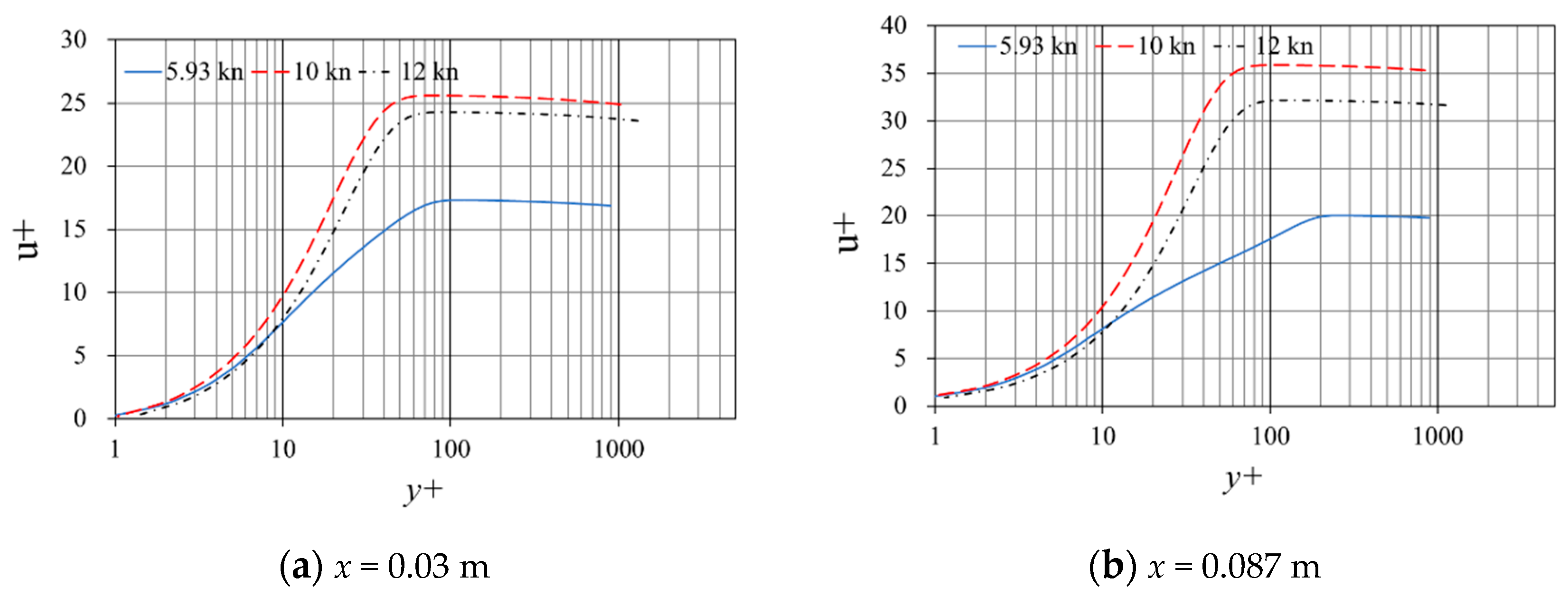
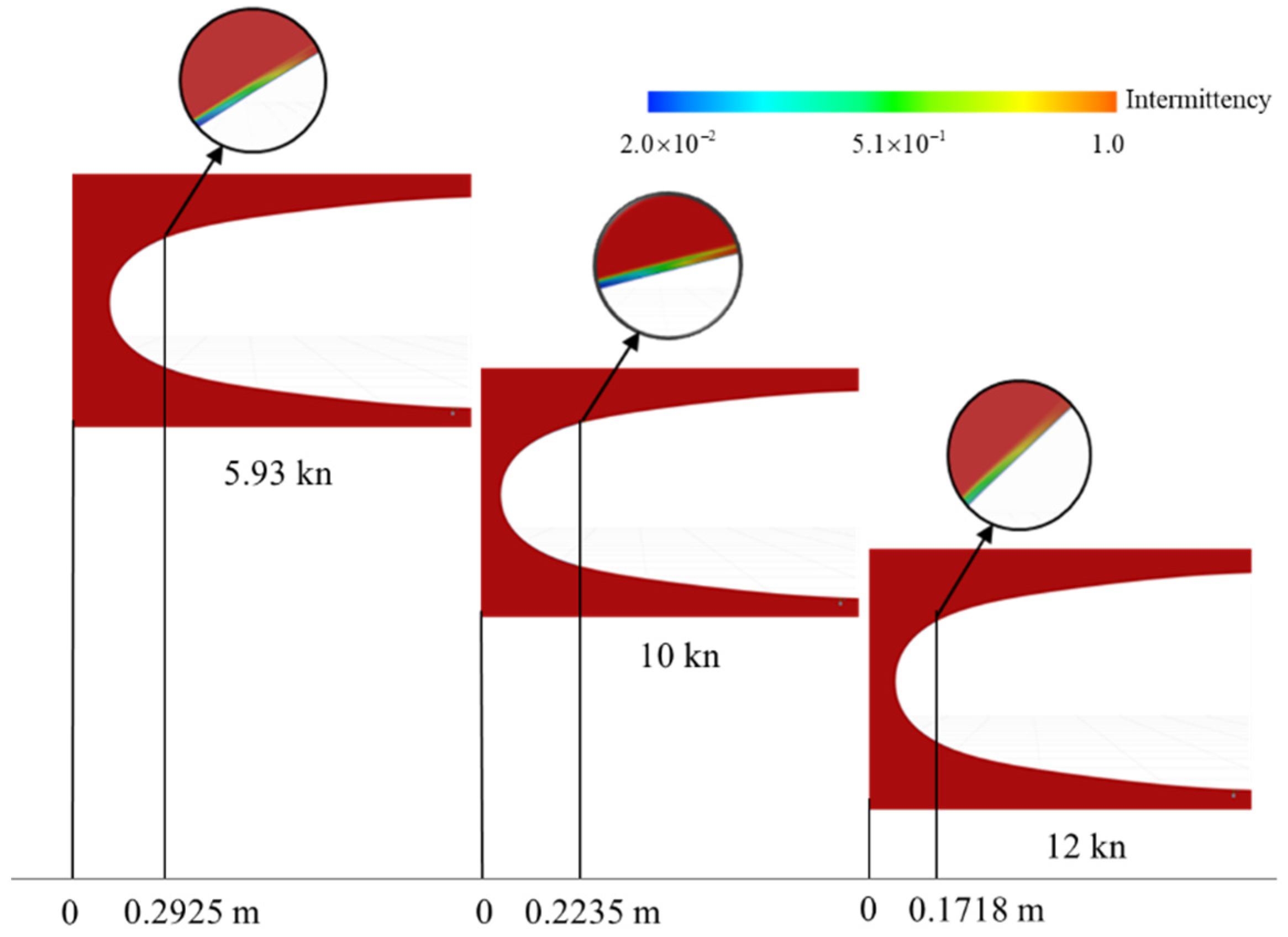
4.1. Overview of the Fluid and the Boundary Layer Transition
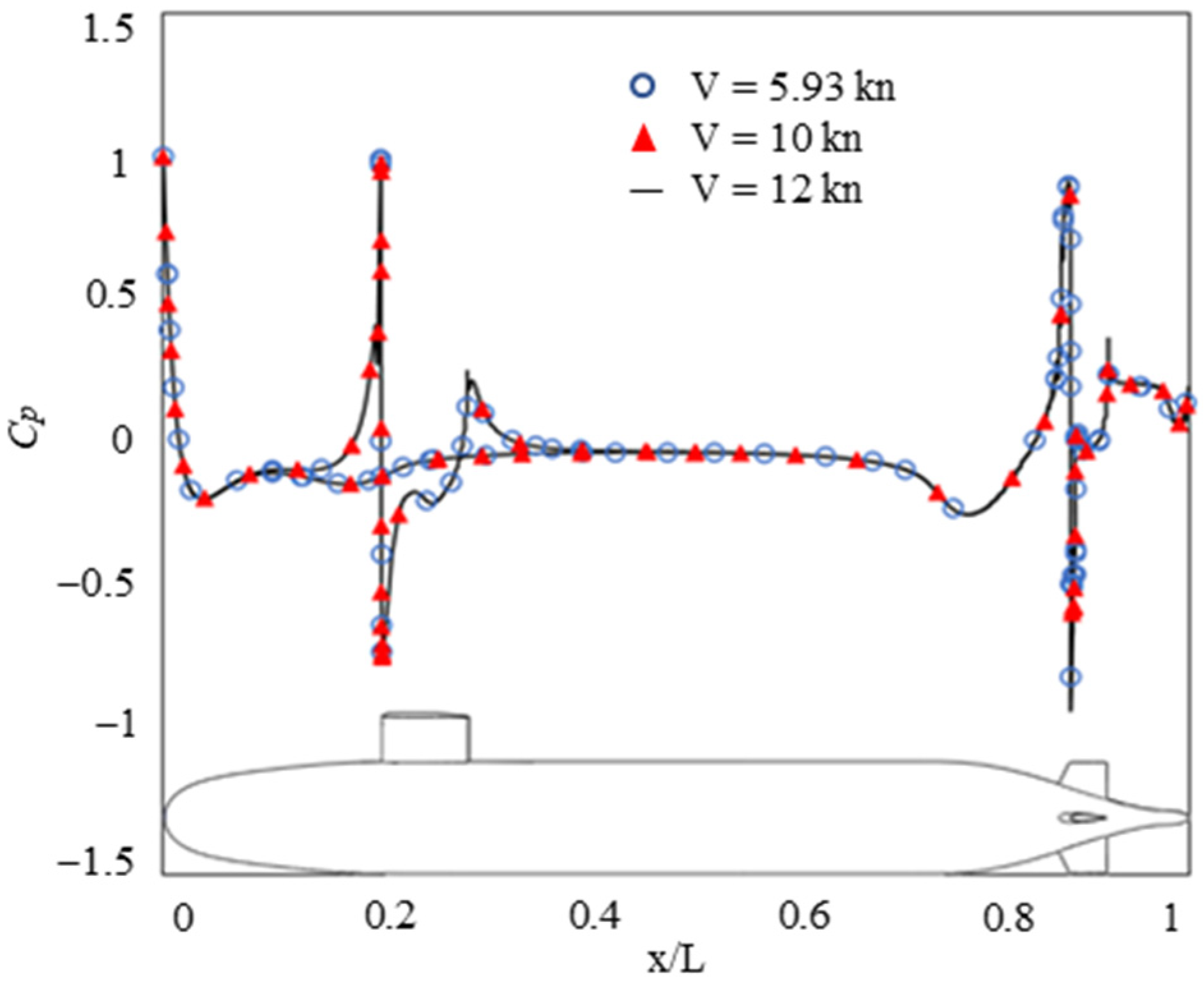
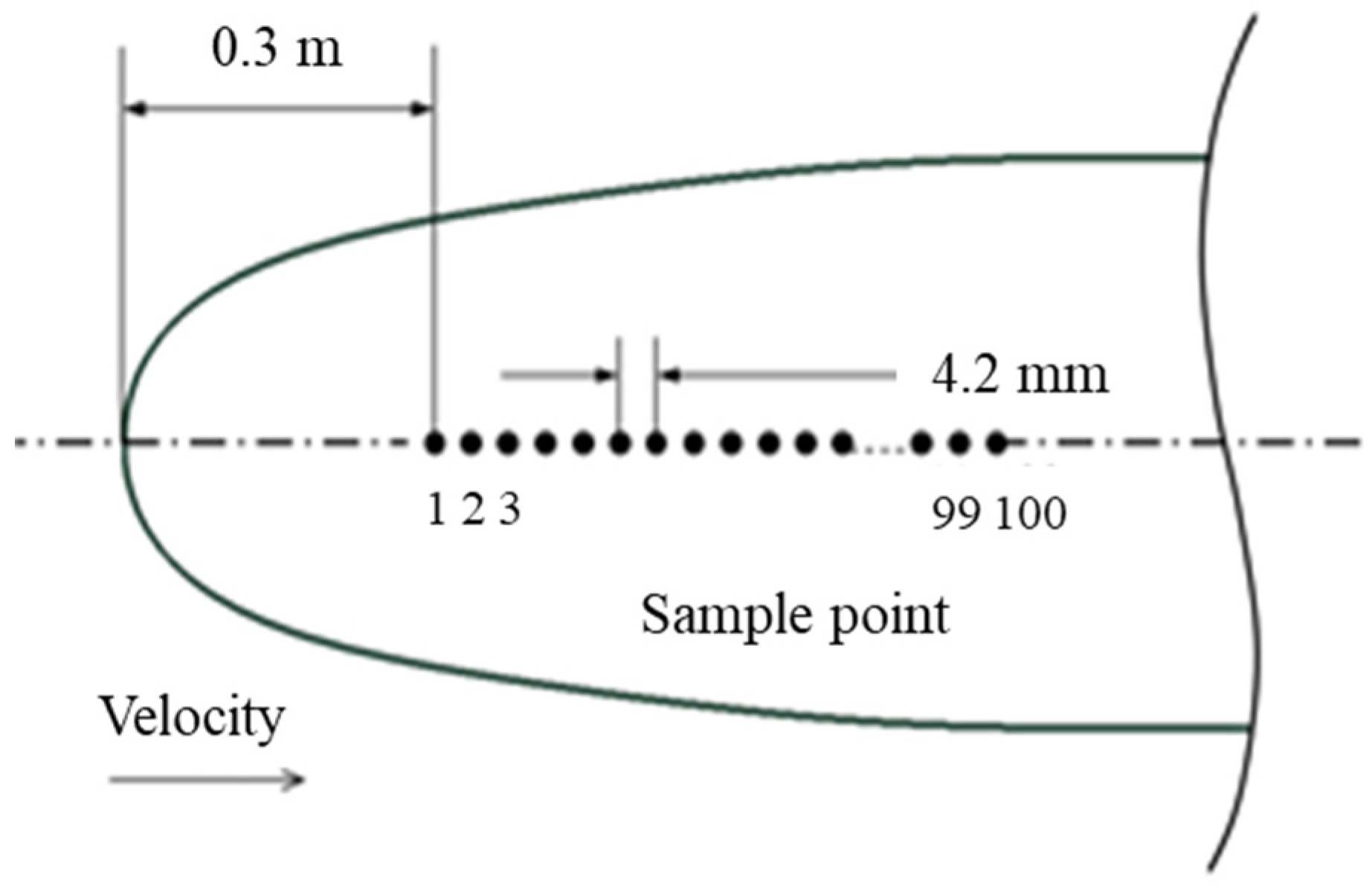
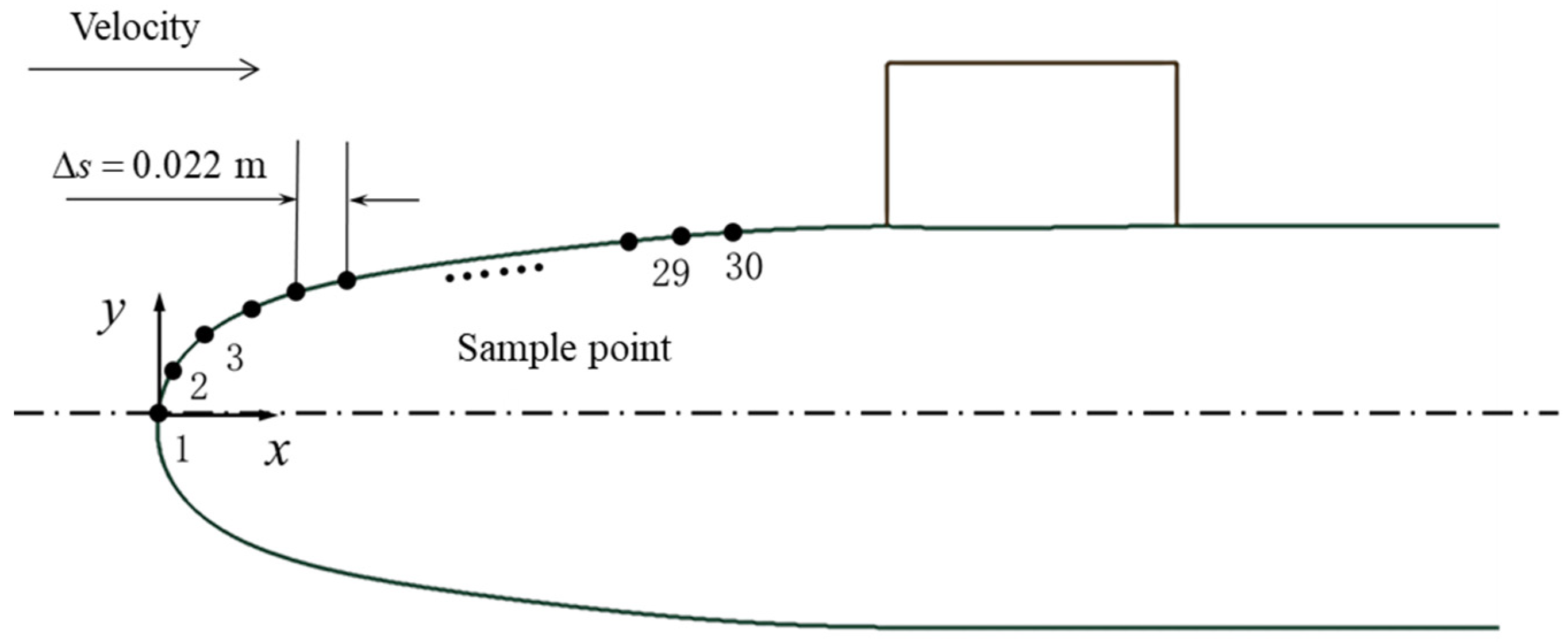
4.2. Axial Pressure Distribution
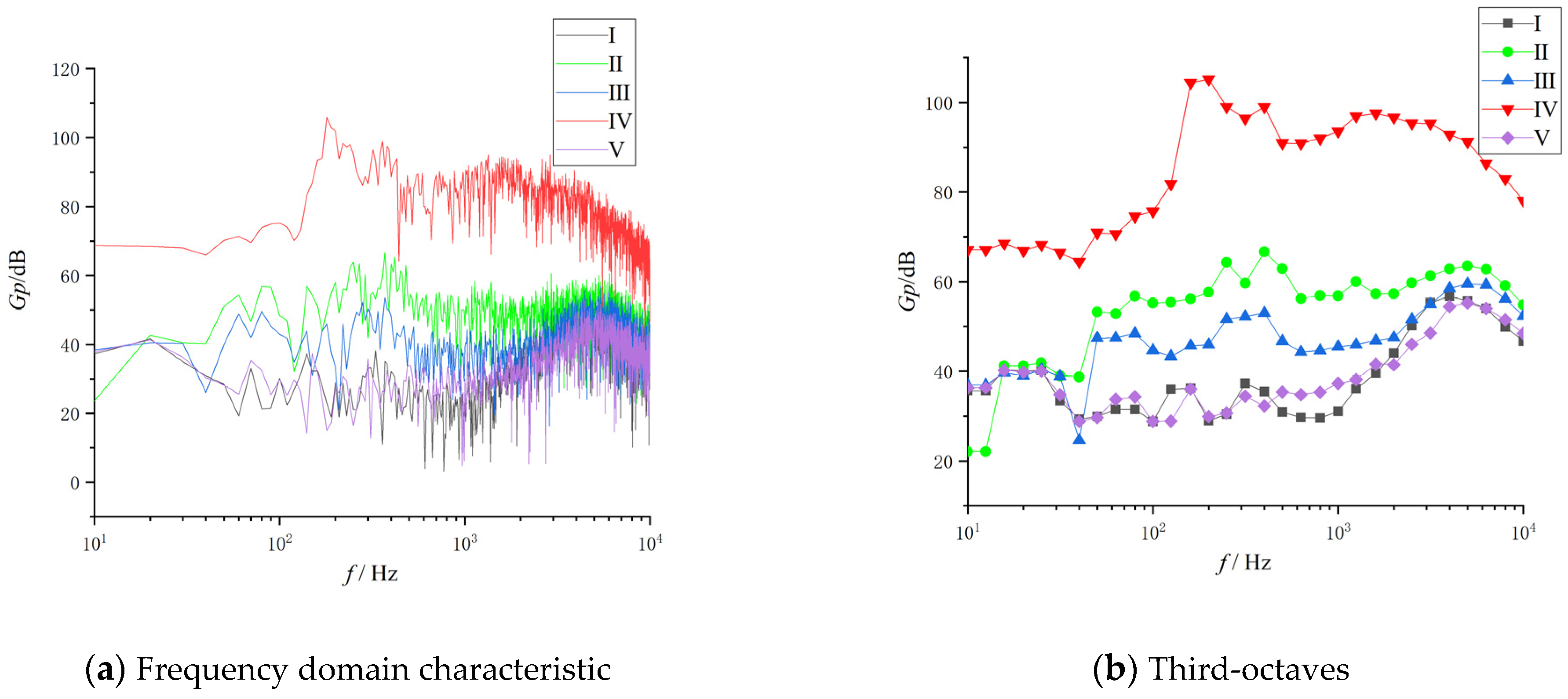
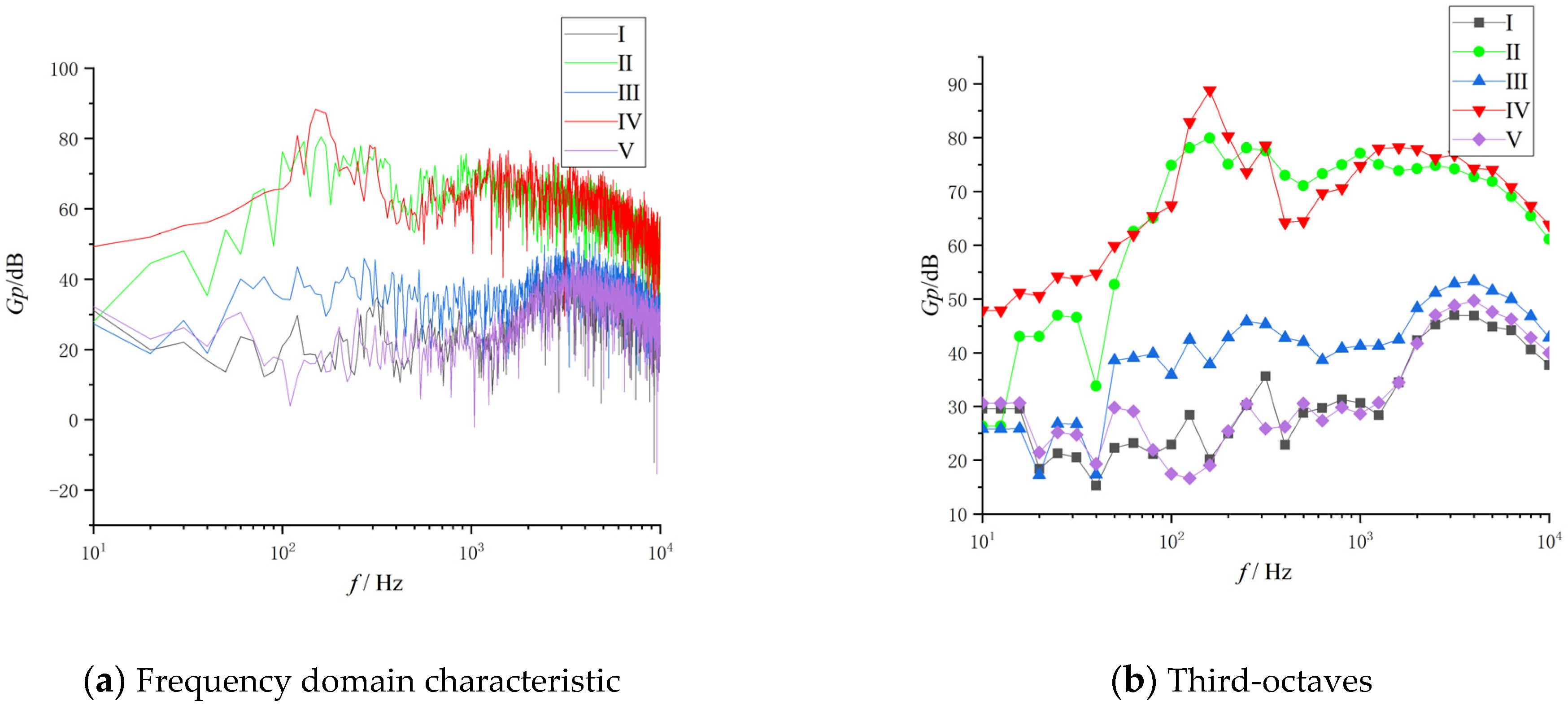
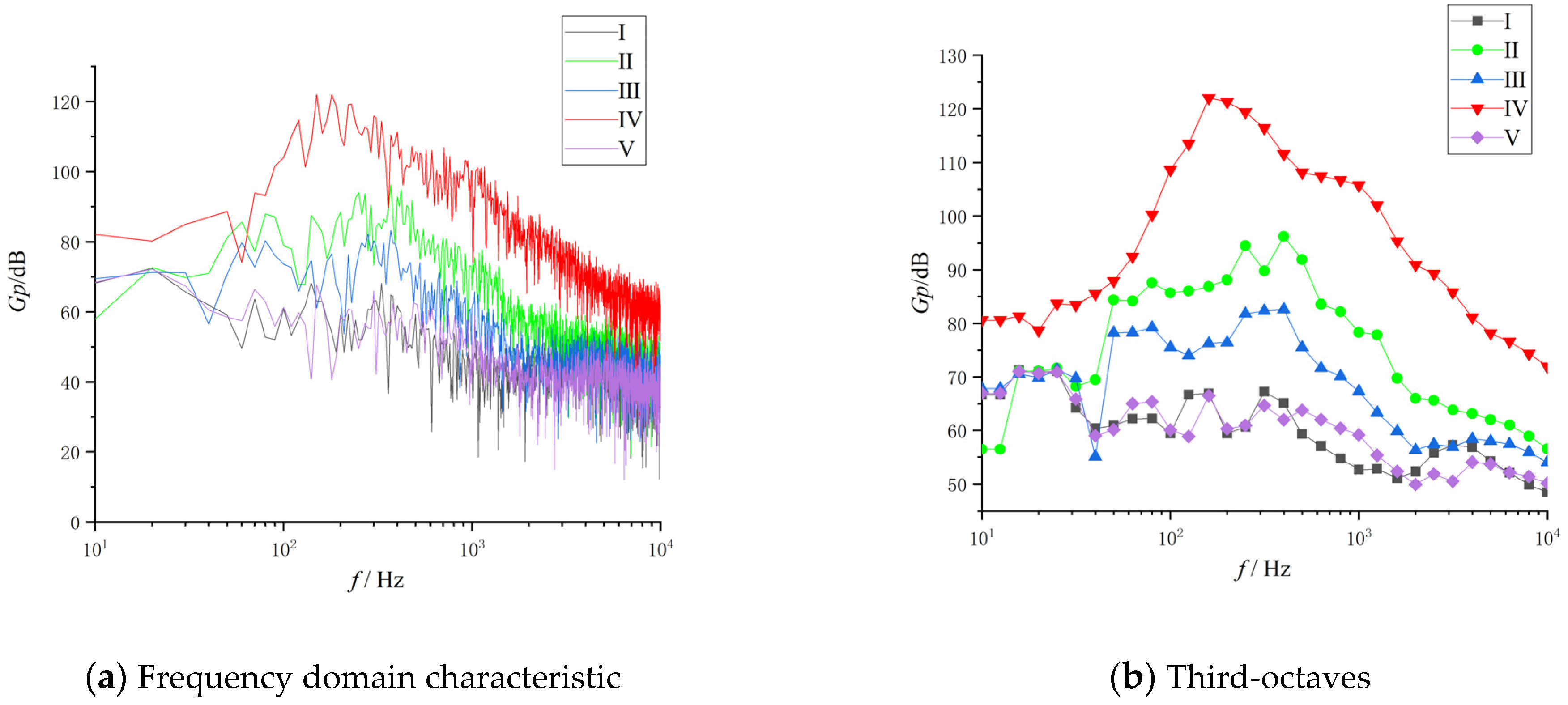
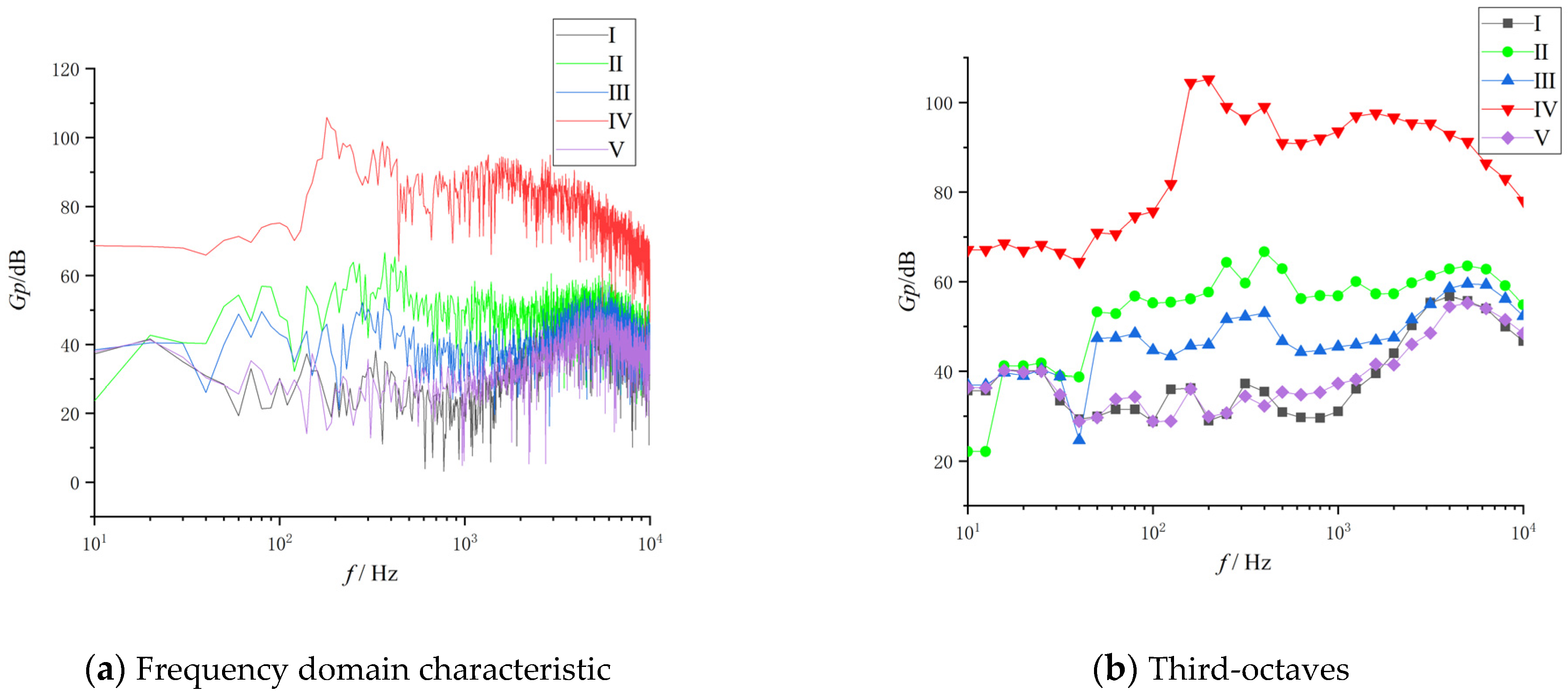
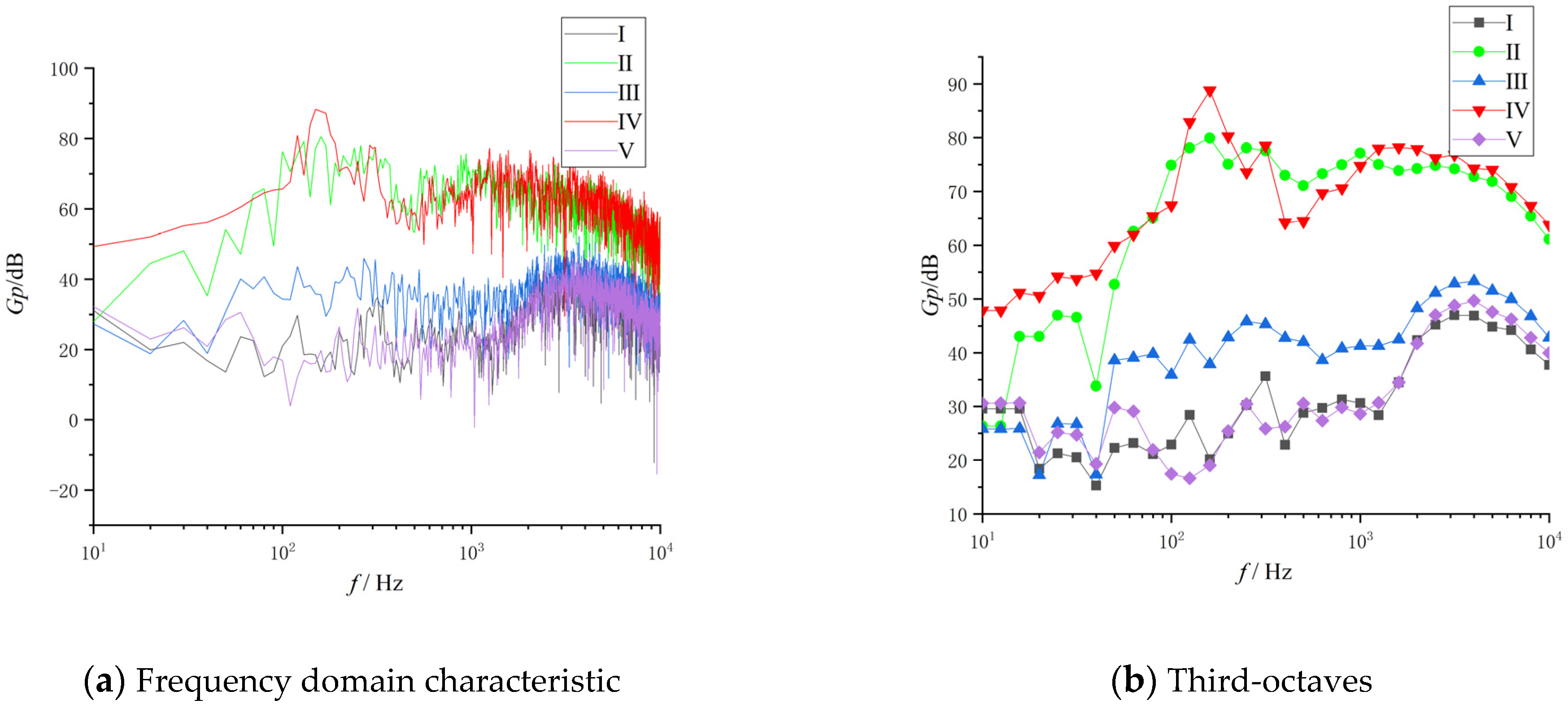
4.3. Self-Power Spectral of Wall Pressure Fluctuation
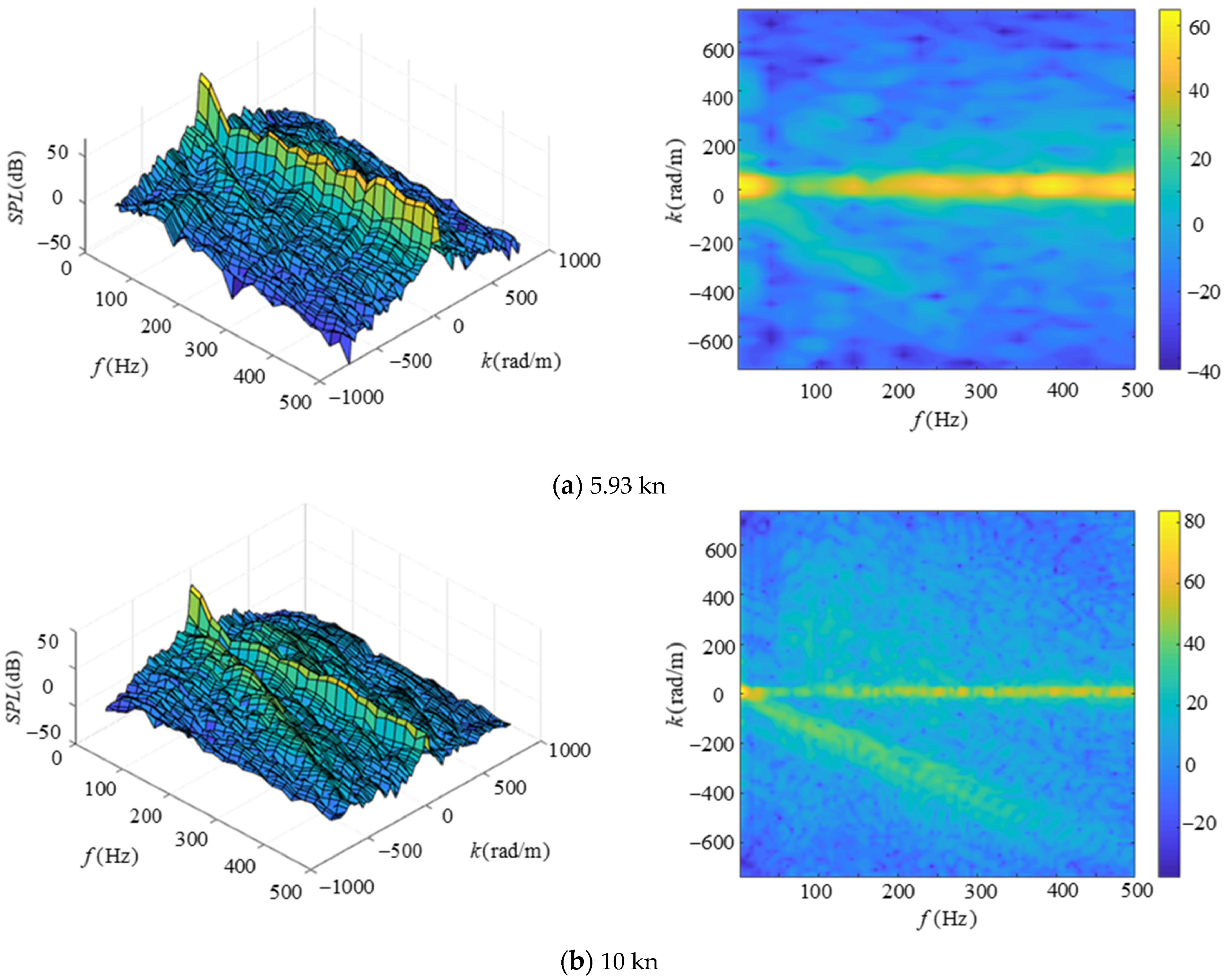
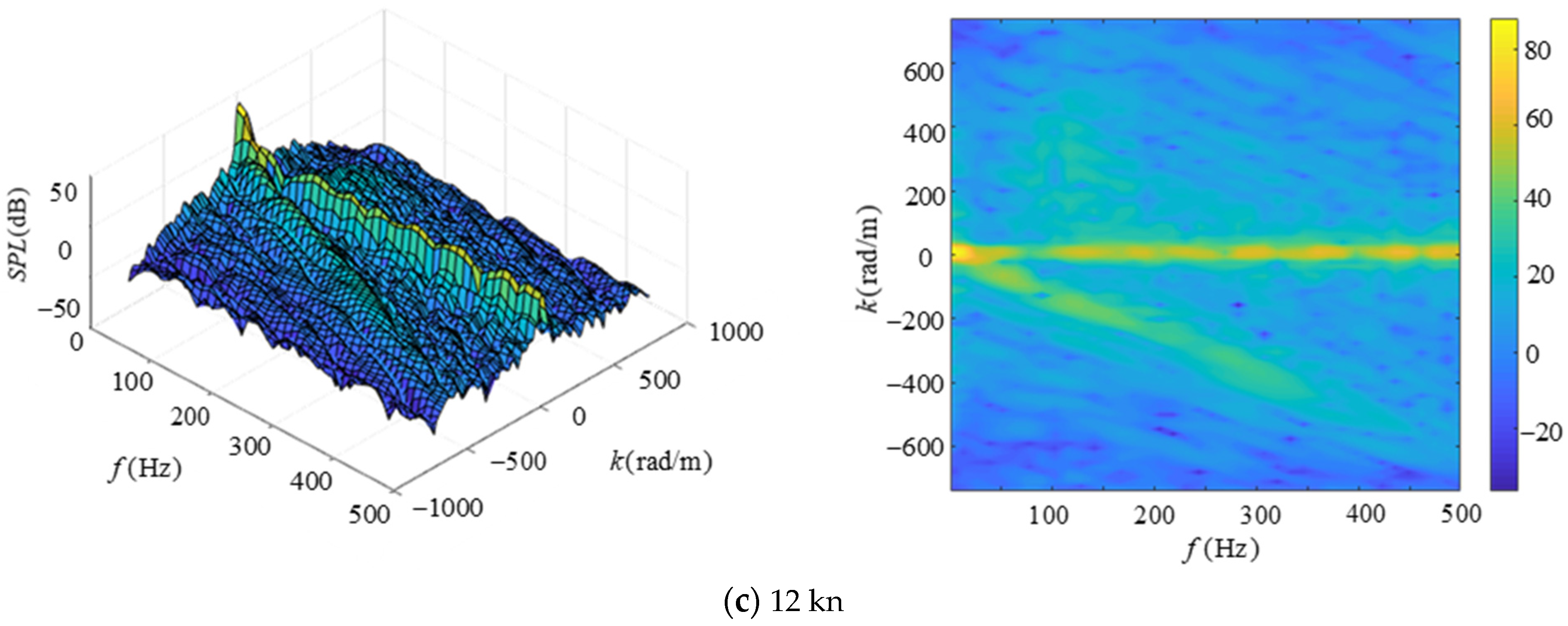
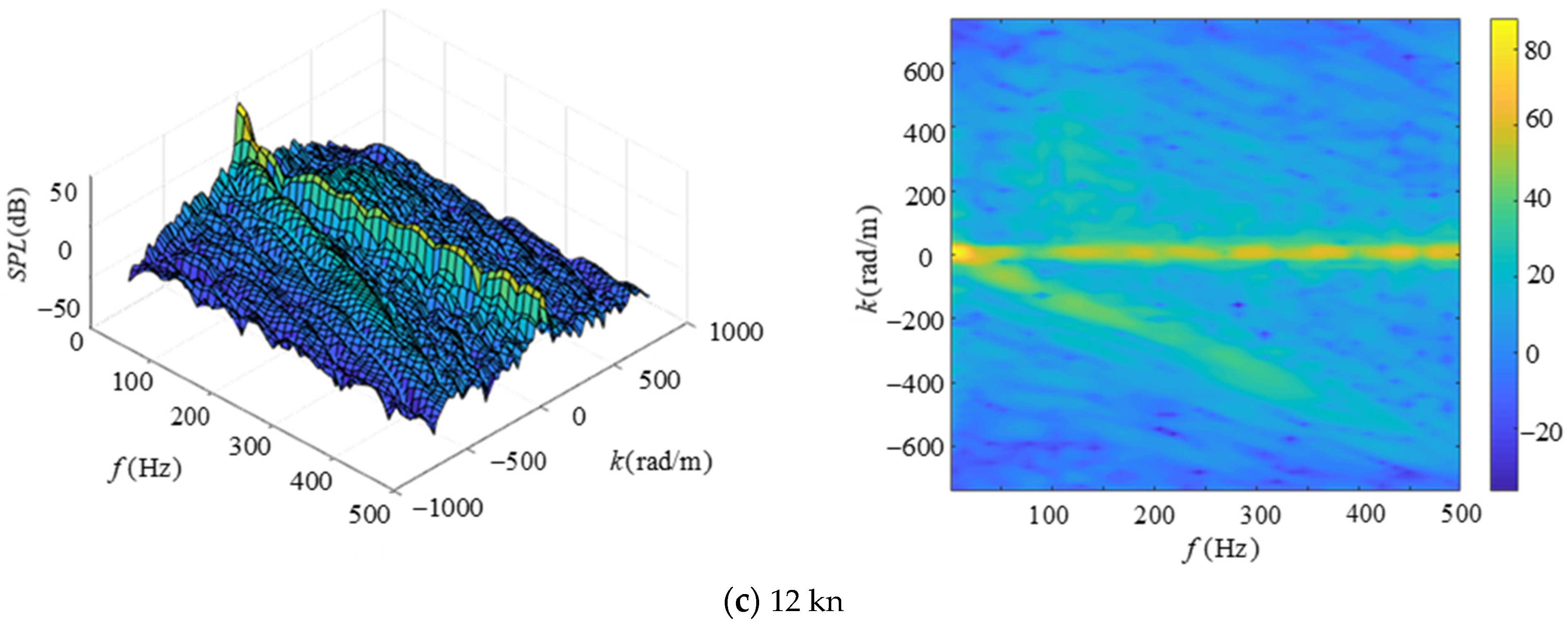
4.4. Wave-Number Frequency Spectrum of Wall Pressure Fluctuation
5. Conclusions
- (1)
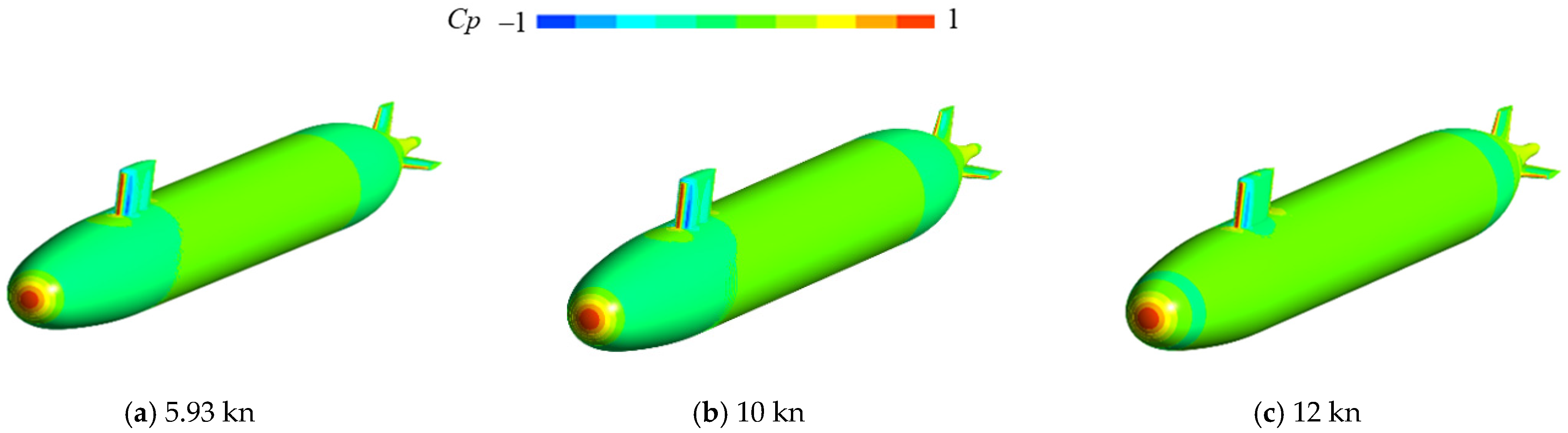
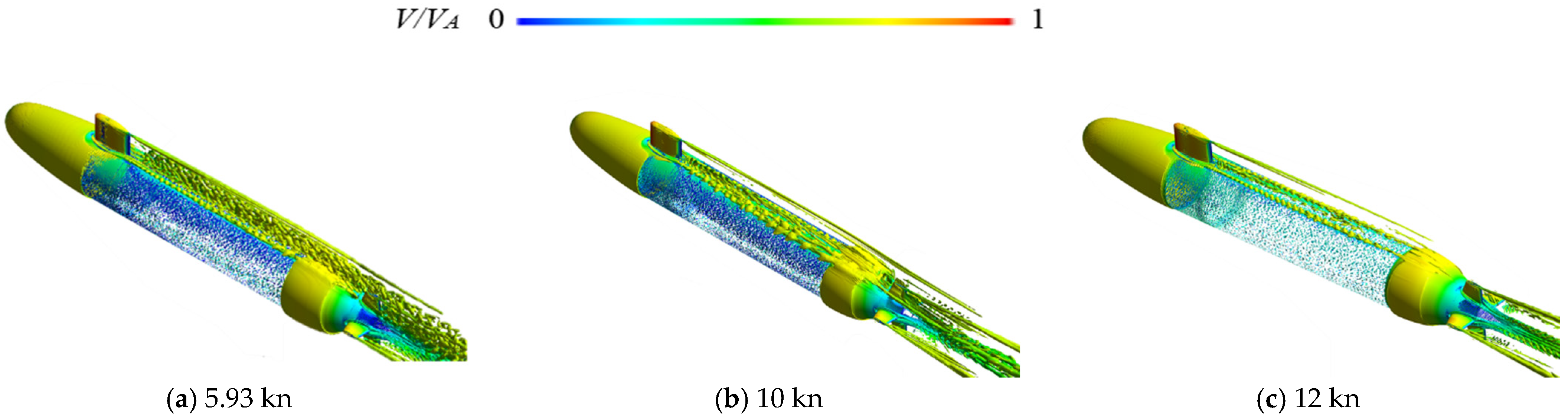
- The distribution of pressure coefficients along the ridge of the mid-longitudinal profile and the distribution of pressure and velocity in the flow field of the submarine under various velocities essentially followed the same pattern. The influence of velocities on the flow field was more apparent in the numerical magnitude of pressure and velocity as well as the size and intensity of the vortex structure. With increasing velocity, the submarine experienced an increase in both the drag coefficient and the total drag force. However, the size of the horseshoe vortex at the sail deck’s bottom leading edge decreased as the velocity rose, and its intensity increased.
- (2)
- Using the horizontal distance to the stationary point of the bow as the characteristic length, the critical Reynolds number of the submarine’s bow was 6.339 × 105. With the higher velocity, the crucial Reynolds number was positioned further ahead and the transient point was located farther forward.
- (3)
- When the transient occurred, the pressure fluctuation amplitude greatly increased and appeared to reach a high peak before swiftly decaying and dropping to a lower level in the turbulent region. The pressure fluctuation at the wall of the submarine’s bow was relatively modest in the laminar region. The peak obtained in the transient region rose under conditions of increasing velocity and advanced with it.
- (4)
- As the pulsation energy of each frequency component significantly increased at the transient compared to laminar flow, the magnitude of the pressure fluctuation was reflected in the self-power spectrum. During the development from laminar to the transient, a peak gradually appeared in the frequency range of about 100 Hz, which was associated with the T–S wave generated in the perceptive phase and growing in the linear phase. The T–S wave frequency rose with increasing velocity, and the spectral level followed suit.
- (5)
- In the fully developed turbulent region’s wave-number-frequency spectrum, a clear migration ridge with energy focused in the lower frequency range could be seen. The migration ridges increased in frequency, width, and amplitude as they migrated in the direction of lower wave numbers. The migration velocity was the vortex cluster’s average movement speed; the larger the velocity, the higher the migration velocity, which was maintained at 0.7.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, T.; Liu, H. Measurement of flows over an axisymmetric body with various appendages in a wind tunnel: The DARPA SUBOFF experimental program. In Proceedings of the 19th Symposium on Naval Hydrodynamics, Seoul, Korea, 23–28 August 1992. [Google Scholar]
- Saeed, A.; Ali, A.D.; Ali, S. Effects of bulbous bow on cross-flow vortex structures around a streamlined submersible body at intermediate pitch maneuver: A numerical investigation. J. Mar. Sci. Appl. 2016, 15, 8–15. [Google Scholar]
- Manoha, E.; Troff, B.; Sagaut, P. Trailing-edge noise prediction using large-eddy simulation and acoustic analogy. AIAA J. 2000, 38, 575–583. [Google Scholar] [CrossRef]
- Posa, A.; Balaras, E. A numerical investigation of the wake of an axisymmetric body with appendages. J. Fluid Mech. 2016, 792, 470–498. [Google Scholar] [CrossRef]
- Broglia, R.; Posa, A.; Bettle, M. Analysis of vortices shed by a notional submarine model in steady drift and pitch advancement. Ocean Eng. 2020, 218, 108236. [Google Scholar] [CrossRef]
- Ashok, A.; Buren, T.; Smits, A. The structure of the wake generated by a submarine model in yaw. Exp. Fluids 2015, 56, 123. [Google Scholar] [CrossRef]
- Spalart, P. Detached Eddy Simulation. Annu. Rev. Fluid Mech. 2009, 41, 181–202. [Google Scholar] [CrossRef]
- Alin, N.; Fureby, C. LES of the flow past simplified submarine hulls. In Proceedings of the 8th International Conference on Numerical Ship Hydrodynamics, Busan, Korea, 22–25 September 2003. [Google Scholar]
- Alin, N.; Bensow, R.; Fureby, C. Current capabilities of DES and LES for submarines at straight course. J. Ship Res. 2010, 54, 184–196. [Google Scholar] [CrossRef]
- Liu, Z.; Ying, X.; Tu, C. Numerical simulation and control of horseshoe vortex around an appendage–body junction. J. Fluids Struct. 2011, 27, 23–42. [Google Scholar]
- Wang, X.; Huang, Q.; Pan, G. Numerical research on the influence of sail leading edge shapes on the hydrodynamic noise of a submarine. Appl. Ocean Res. 2021, 117, 102935. [Google Scholar] [CrossRef]
- Magionesi, F.; Ciappi, E. Characterization of the response of a curved elastic shell to turbulent boundary layer. In Proceedings of the ASME 2010 3rd Joint US-European Fluids Engineering Summer Meeting and 8th International Conference on Nanochannels, Microchannels, and Minichannels, Montreal, QC, Canada, 1–5 August 2010. [Google Scholar]
- Bhushan, S.; Alam, M.F.; Walters, D.K. Evaluation of hybrid RANS/LES models for prediction of flow around surface combatant and SUBOFF geometries. Comput. Fluids 2013, 88, 834–849. [Google Scholar] [CrossRef]
- Magionesi, F.; Mascio, A.D. Investigation and modeling of the turbulent wall pressure fluctuation on the bulbous bow of a ship. J. Fluids Struct. 2016, 67, 219–240. [Google Scholar] [CrossRef]
- Li, H.; Huang, Q.; Pan, G. An investigation on the flow and vortical structure of a pre-swirl stator pump-jet propulsor in drift. Ocean Eng. 2022, 250, 111061. [Google Scholar] [CrossRef]
- Dietiker, J.F.; Hoffmann, K.A. Predicting wall pressure fluctuation over a backward-facing step using detached eddy simulation. J. Aircr. 2009, 46, 2115–2120. [Google Scholar] [CrossRef]
- Meng, W.; Moin, P. Computation of trailing-edge flow and noise using large-eddy simulation. AIAA J. 2000, 38, 2201–2209. [Google Scholar]
- Meng, W.; Moreau, S.; Iaccarinoand, G. LES prediction of wall-pressure fluctuations and noise of a low-speed airfoil. Int. J. Aeroacoustics 2009, 8, 177–198. [Google Scholar]
- Menter, F. Stress-Blended Eddy Simulation (SBES)—A new paradigm in hybrid RANS-LES modeling. In Symposium on Hybrid RANS-LES Methods; Springer: Cham, Switzerland, 2016. [Google Scholar]
- ANSYS. ANSYS 2020 R1 Fluent User Guide; ANSYS: Canonsburg, PA, USA, 2020. [Google Scholar]
- Groves, N.C.; Huang, T.T.; Chang, M.S. Geometric Characteristics of DARPA (Defense Advanced Research Projects Agency) SUBOFF Models (DTRC Model Numbers 5470 and 5471); David Taylor Research Center Bethesda MD Ship Hydromechanics Dept.: Bethesda, MD, USA, 1989. [Google Scholar]
- Liu, H.; Huang, T. Summary of DARPA SUBOFF Experiment Program Data; Naval Surface Warface Center, Cardrock Division (NSWCCD): Bethesda, MD, USA, 1999. [Google Scholar]
- BULL, P. The validation of CFD predictions of nominal wake for the SUBOFF fully appended geometry. In Proceedings of the Twenty-First Symposium on Naval Hydrodynamics, Washington DC, USA, 24–28 June 1997. [Google Scholar]
- Hu, C.; Huang, X. The location of boundary-layer transition detected by pressure fluctuation measurements. Exp. Meas. Fluid Mech. 2002, 2, 67–71. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Groups | ID | Number (M) | Drag Force (N) |
|---|---|---|---|
| Coarse | 1 | 23 | 97.3 |
| Medium | 2 | 44.3 | 99.6 |
| Fine | 3 | 82 | 100.7 |
| Velocity (kn) | ReL | Fx (N) | Cd | A (m2) | Γ (m2/s2) |
|---|---|---|---|---|---|
| 5.93 | 1.322 × 107 | 99.6 | 0.106 | 8.195 × 10−5 | 5.397 × 10−4 |
| 10 | 2.230 × 107 | 262.2 | 0.098 | 7.902 × 10−5 | 1.482 × 10−3 |
| 12 | 2.676 × 107 | 370.7 | 0.096 | 7.528 × 10−5 | 1.815 × 10−3 |
| Velocity (kn) | S (m) | Res |
|---|---|---|
| 5.93 | 0.2925 | 8.880 × 105 |
| 10 | 0.2235 | 1.144 × 106 |
| 12 | 0.1718 | 1.056 × 106 |
| Velocity (kn) | 1/κ | C |
|---|---|---|
| 5.93 | 3.1379 | 1.9797 |
| 10 | 3.1086 | 1.5708 |
| 12 | 3.1146 | 1.5411 |
| 5.93 kn | 10 kn | 12 kn | |
|---|---|---|---|
| fTS (Hz) | 93.33 | 133.33 | 166.67 |
| Spectrum level (dB) | 135.70 | 141.84 | 149.92 |
| Item | 5.93 kn | 10 kn | 12 kn |
|---|---|---|---|
| Spectral peak level (dB) | 21.79 | 64.61 | 83.57 |
| Frequency range (Hz) | (0,250) | (0,450) | (0,500) |
| Wavenumber range (rad/m) | (−529,0) | (−680,0) | (−695,0) |
| Migration rate (m/s) | 2.17 | 3.62 | 4.49 |
| Dimensionless migration rate | 0.71 | 0.70 | 0.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Huang, Q.; Sun, G.; Wang, X. Numerical Research of the Pressure Fluctuation of the Bow of the Submarine at Different Velocities. J. Mar. Sci. Eng. 2022, 10, 1188. https://doi.org/10.3390/jmse10091188
He X, Huang Q, Sun G, Wang X. Numerical Research of the Pressure Fluctuation of the Bow of the Submarine at Different Velocities. Journal of Marine Science and Engineering. 2022; 10(9):1188. https://doi.org/10.3390/jmse10091188
Chicago/Turabian StyleHe, Xing, Qiaogao Huang, Guocang Sun, and Xihui Wang. 2022. "Numerical Research of the Pressure Fluctuation of the Bow of the Submarine at Different Velocities" Journal of Marine Science and Engineering 10, no. 9: 1188. https://doi.org/10.3390/jmse10091188
APA StyleHe, X., Huang, Q., Sun, G., & Wang, X. (2022). Numerical Research of the Pressure Fluctuation of the Bow of the Submarine at Different Velocities. Journal of Marine Science and Engineering, 10(9), 1188. https://doi.org/10.3390/jmse10091188