1. Introduction
In the last decades, the seas have become substantially noisier and anthropogenic sources contribute considerably to this degradation trend, with detrimental effects on sea life, particularly on marine mammals (e.g., [
1]). Shipping operations’ resource and infrastructure development have increased the noise generated by human activities, whereas sounds of biological origin have been reduced by hunting, fishing, and habitat degradation. In particular, ambient ocean noise levels below 300 Hz have increased by 15–20 dB over the last century, and shipping noise contributes significantly to such increases in this frequency range [
2].
Many recent studies have shown that underwater-radiated noise from commercial ships may have both short- and long-term negative consequences on sea life. The issue of underwater noise and its impact on marine mammals was first raised by the IMO in 2004. It was noted that continuous anthropogenic noise in the ocean was primarily generated by shipping. Since ships routinely cross international boundaries, the management of such noise required a coordinated international response. Moreover, in 2008, the IMO Marine Environment Protection Committee (MEPC) [
3,
4] agreed to develop non-mandatory technical guidelines to minimize the introduction of incidental noise from commercial shipping operations into the marine environment to reduce the potential adverse impacts on marine life.
As far as the radiated noise is concerned, it has been found that different components are dominant at different speeds. In particular, hydrodynamic noise due to propeller operation in the wake of the ship and machinery is dominant at low speeds, whereas propeller noise is dominant at higher speeds, especially when cavitation takes place [
5]. Marine propellers are the standard devices used for ship propulsion and operate at high rotational speeds so that their blades produce the required forward thrust. High-flow velocity increases the likelihood of cavitation, and partial cavitation usually appears near the tip region and occasionally also at the hub of marine propeller blades and the trailing vortex sheets. The fast variation of the generated bubble cavitation volume on the propeller blades, acting as acoustic monopole terms, in conjunction with the dipole contribution due to unsteady blade loading, leads to the generation of intensive noise, especially at the blade frequency and the first harmonics, while at higher frequencies, noise is caused by sheet cavity collapse and shock wave generation [
6]. The lower frequency band of the noise generated by marine propellers, especially when they operate under partial cavitating conditions, has a negative impact on the life conditions of marine mammals. Additional discussion concerning underwater noise from marine propellers including the latest research advances can be found in several sources—see, for e.g., [
7,
8] and the references therein.
On the other hand, flapping-foil thrusters are systems operating at a substantially lower frequency compared with marine propellers and are characterized by much smaller power concentrations. These biomimetic devices are able to operate very efficiently while offering the desirable levels of thrust required for the propulsion of small vessels or autonomous underwater vehicles (AUVs); for examples, see [
9,
10]. An extended review of hydrodynamic scaling laws in aquatic locomotion and fishlike swimming can be found in [
11]. Moreover, flapping-foil configurations have been investigated both as main propulsion devices and for augmenting ship propulsion in waves, substantially improving the performance by the exploitation of renewable wave energy. More details can be found in [
12,
13], as well as a review in [
14]. In the framework of the Seatech H2020 project entitled “Next generation short-sea ship dual-fuel engine and propulsion retrofit technologies” (
https://seatech2020.eu/, accessed on 5 August 2022), a concept of symbiotic ship engine and propulsion innovations is studied that, when combined, are expected to lead to a significant increase in fuel efficiency and a reduction in greenhouse gas emissions. The proposed renewable energy-based propulsion innovation is based on the biomimetic dynamic wing, mounted at the ship bow to augment the ship’s propulsion in moderate and higher sea states, capturing wave energy and producing extra thrust while damping ship motions.
In this work, we consider the generation of noise by flapping foils arranged in the neighborhood of the above vessels, including the scattering effects by the hull, which, in addition to free-surface and seabed effects, significantly contribute to the modification of the characteristics of the acoustic field. A boundary element method (BEM) is developed to treat the three-dimensional (3D) scattering problem in the frequency domain forced by monopole and dipole source terms associated with the Ffowcs Williams and Hawkings (FW-H) [
15] equation. Numerical results are presented in selected cases illustrating that the hull geometry and acoustic properties, as well as the sea surface and seabed effects, are important for the determination of the directionality of the generated noise and significantly affect the propagation in the underwater ocean environment.
2. Noise Generation from Flapping Thruster
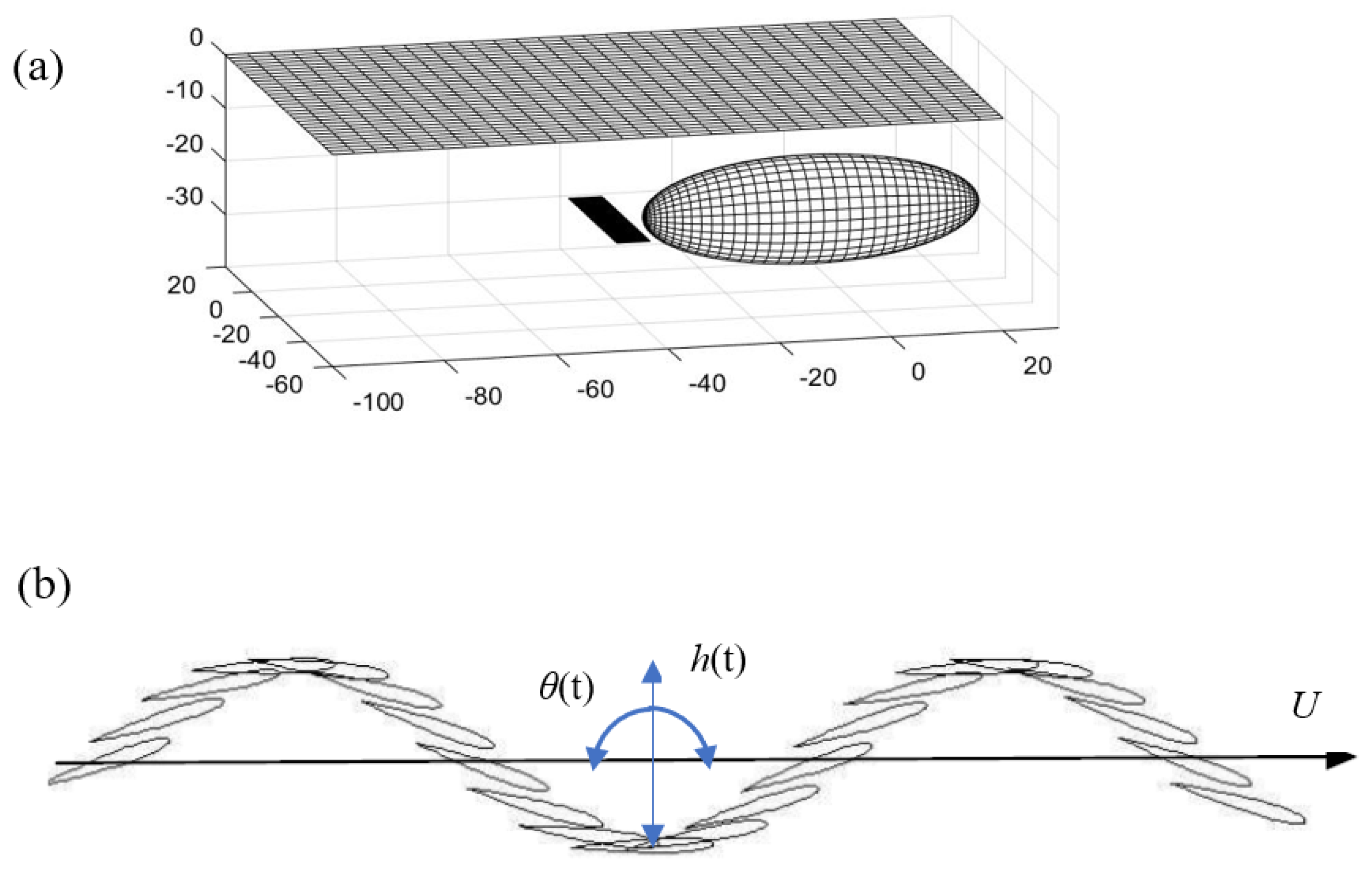
The flapping thruster operates as an unsteady hydrofoil in combined oscillatory heaving motion
and pitching motion
with a phase difference of about 90 degrees, as depicted in
Figure 1. The most important non-dimensional parameters are the Strouhal number
where
is the frequency, the heaving amplitude
, the forward travelling speed
, the heave-to-chord ratio
, the pitching amplitude
, and the phase difference between the foil heave and pitch oscillatory motions.
The unsteady forces lead to the generation of oscillatory vertical lift force
and horizontal thrust force
with a significant non-zero mean (blue arrow in
Figure 1). The time history of the total foil force is given from Equation (1):
where
are the horizontal and vertical unit vectors, respectively. The calculation of hydrodynamic loads can be obtained by the pressure integration on the foil using various methods, as, for example, those used by [
16,
17,
18]. It is noted that, even in the single frequency case of flapping-foil kinematics, the hydrodynamic forces are periodic, but contain multiple harmonics due to the effects of various nonlinearities and the fact that the horizontal thrust force component
is manifested at the double frequency.
Low-frequency noise caused by the fluctuations of foil pressure and volume flow disturbance due to the oscillatory motion of the flapping thruster can be predicted in free space using the Ffowcs Williams and Hawkings equation (FW-H), described as follows:
where
is the speed of sound in the medium (
ranges from
to
for seawater), while the various terms on the right-hand side correspond to the acoustic monopole
dipole
and quadrupole source terms
respectively [
19]. The quadrupole term is predominantly associated with the turbulence and vorticity-induced noise or strongly transonic flow phenomena and becomes important at higher frequencies. Focusing on the low-frequency part of the generated noise spectrum, the contributions from the latter are neglected in the present work. Following Farassat [
20], the formulation of an integral representation of the solution of Equation (2) forced by the monopole and dipole terms is considered. Taking into account that the speed of sound in water is much greater than the flow velocities, the following approximation, concerning the noise generation by the flapping thruster from the monopole and dipole sources, is obtained (see also [
16]):
where
,
is the acoustic pressure from the monopole and dipole sources respectively,
denotes the retarded time between the observation point
in the foil frame of reference and the hydrodynamic force considered to be applied at the hydrodynamic pressure center of the foil
, and
denotes the center of volume displaced by the foil. In the case of an unsteady cavitating foil thruster, the latter term corresponds mainly to the bubble cavitation volume.
Figure 2 presents two different time snapshots of the acoustic pressure field obtained from Equation (4) in the case of a flapping thruster operating in water. The hydrodynamic foil loads have been calculated by pressure integration using the results obtained by the 3D BEM method of [
16], which is briefly presented in the
Appendix A.
The periodic time-series of acoustic force
and cavity volume data
can be represented by Fourier series in the form:
including the basic harmonic (
n = 1) as well as its multiples. By converting Equation (2) to the frequency domain, assuming
and focusing on a single harmonic (basic frequency or its multiples), the above equation takes the form:
where
, and
now stands for the center of volume or the center of pressure. Using the expression of the Green’s function of the Helmholtz equation in free space,
and its derivative
the expressions provided by Equations (3) and (4) are the time-domain equivalent of the solution of the Helmholtz equation with complex monopole and dipole source intensities provided by:
that is:
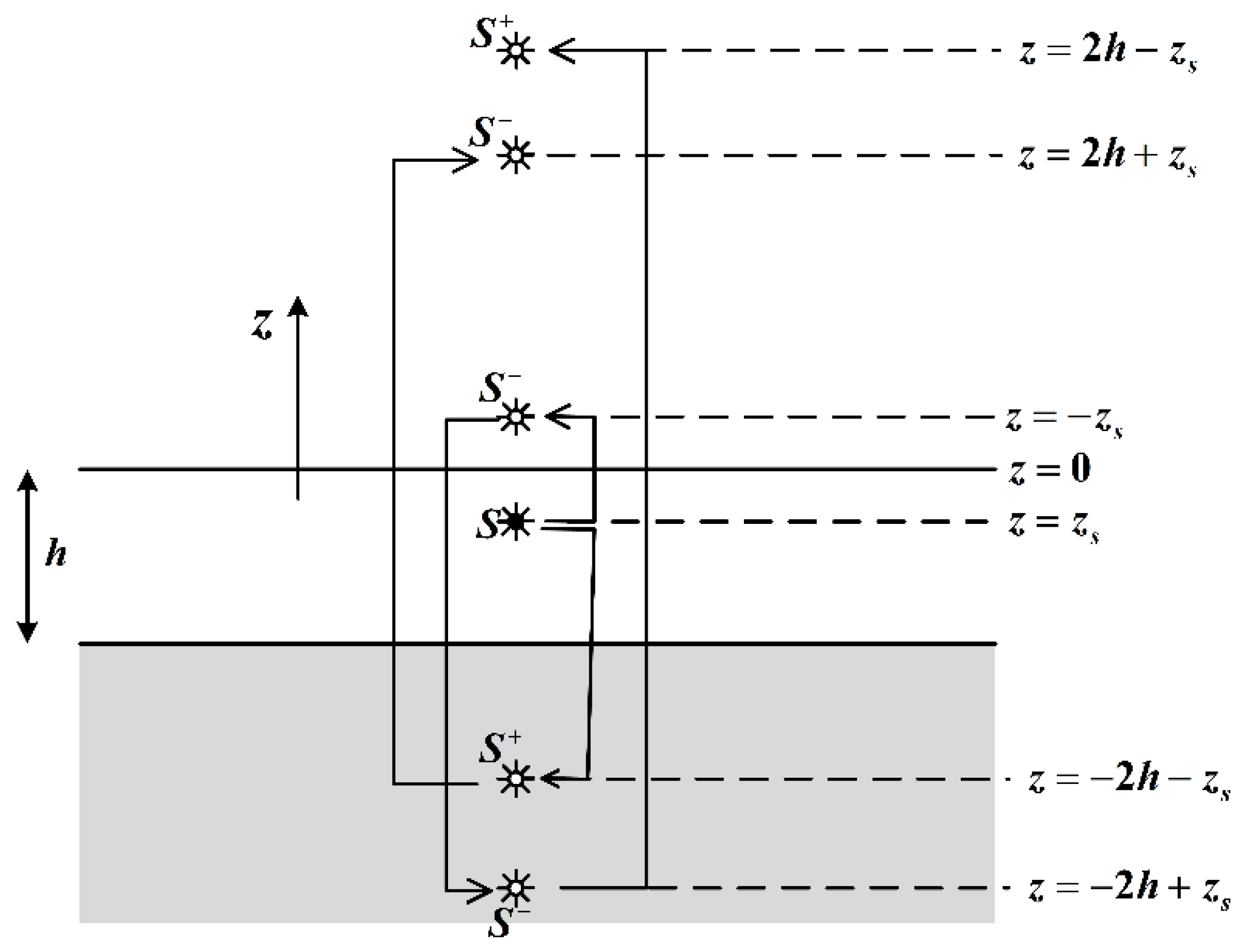
Given the intensity of the complex monopole and dipole source terms at the basic frequency or its multiples, as provided by the hydrodynamic flapping-foil responses described above, in the sequel, the scattering problem is considered, excited by any monopole or dipole term in the vicinity of a 3D body representing the AUV or seagoing vessel, also accounting for the effects of the free-surface and seabed boundary of the ocean acoustic waveguide. For this purpose, first, the expressions of the Green’s function and its derivatives, corresponding to Equations (9) and (10), in a plane-horizontal waveguide confined between a pressure-release upper boundary (sea surface) and the lower seabed boundary, will be provided. The latter will be subsequently used to formulate the 3D scattering problem in the ocean acoustic waveguide and to study the scattering and directionality effects of noise generation from flapping thrusters in the sea environment.
5. Numerical Results and Discussion
In this section, the acoustic field predicted by the solution of the 3D scattering problem using the developed BEM method is presented in the case of a sound source located close to the stern of an ellipsoid modeling a small underwater vehicle, in an isovelocity
m/s ocean acoustic waveguide of depth
m. The submergence depth is
m and the horizontal distance of the source from the stern is
, where
is the major semi-axis of the ellipsoid. The cases of a monopole, horizontal dipole, and vertical dipole source at a frequency of
Hz are considered.
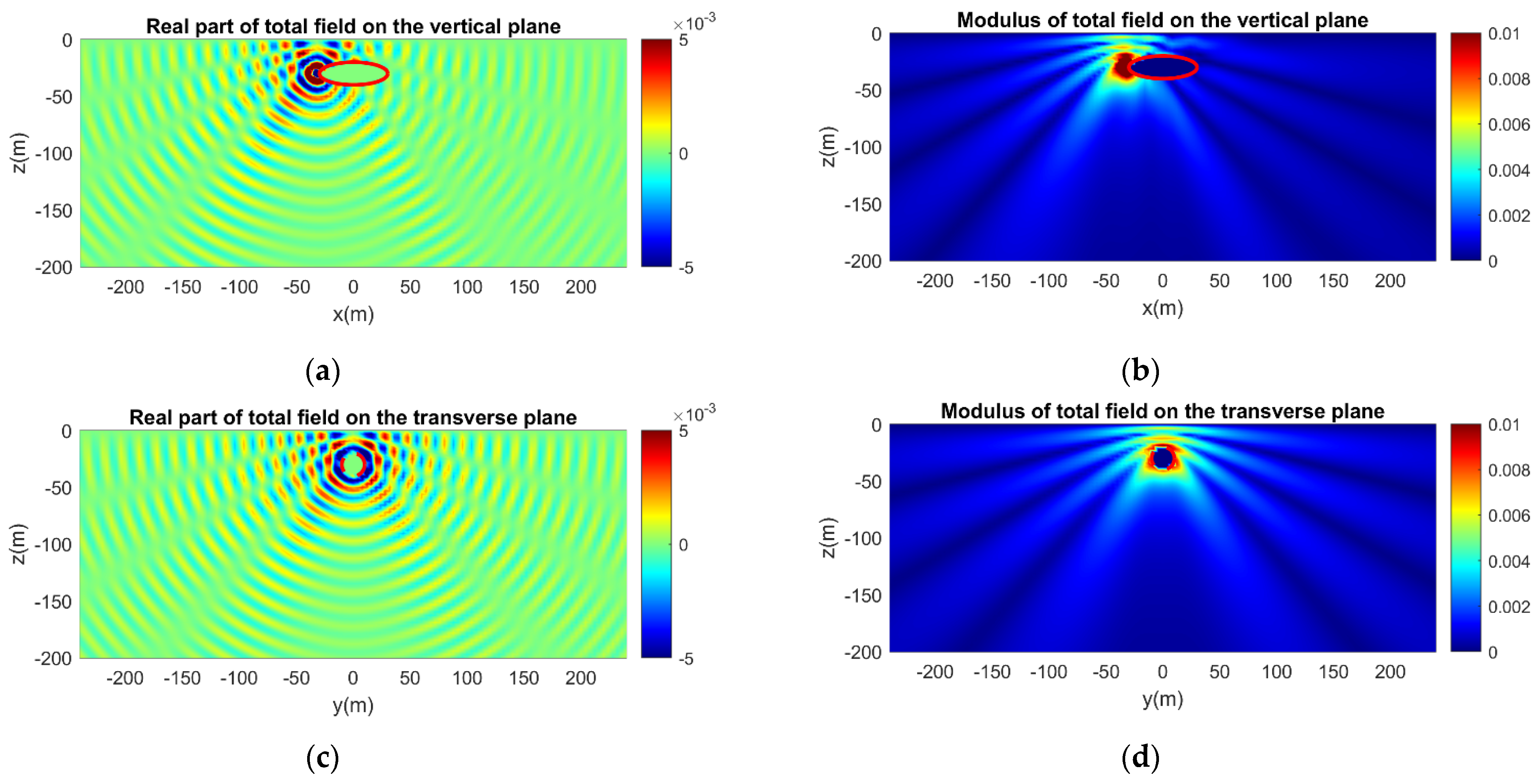
Figure 9,
Figure 10,
Figure 11 and
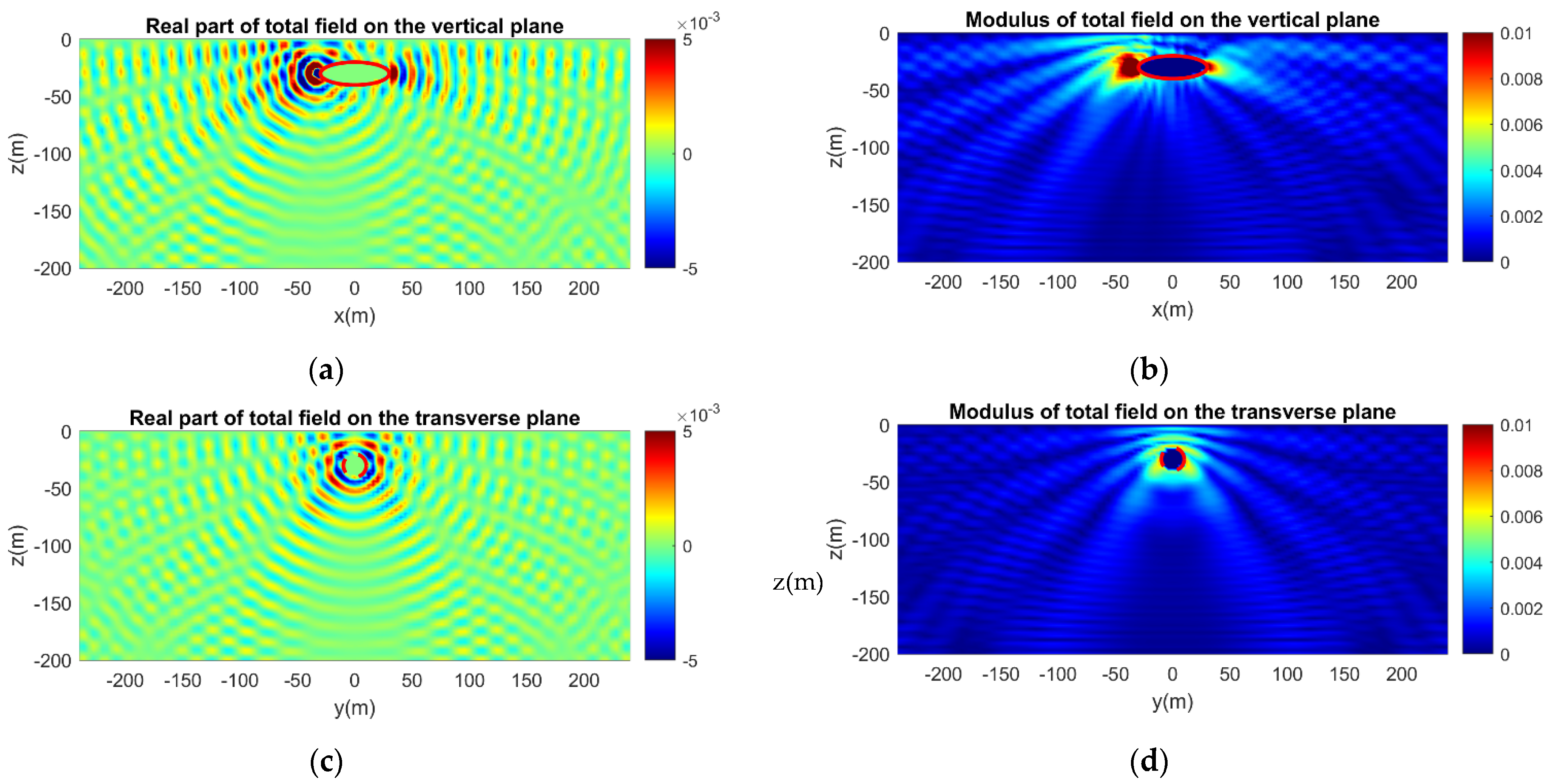
Figure 12 depict the acoustic field when the ellipsoid is acoustically hard, whilst
Figure 13,
Figure 14,
Figure 15 and
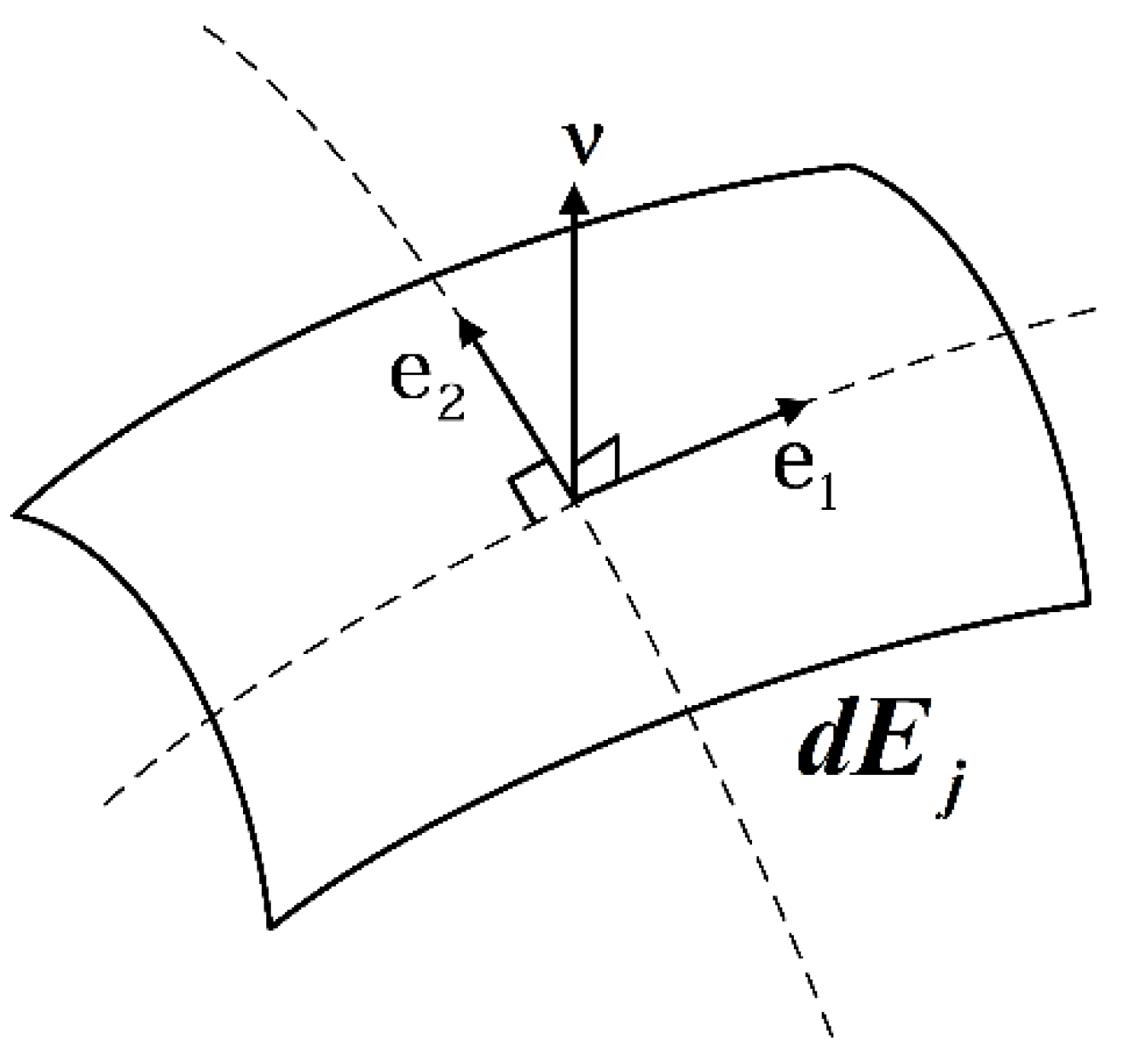
Figure 16 depict the acoustic field when the ellipsoid is acoustically soft. The sea bottom is considered rigid in all calculations. The results include the real part and the modulus of the calculated acoustic field in two planes: (i) a vertical xz-plane passing from the source position and cutting through the major axis of the ellipsoid, and (ii) a transverse yz-plane passing through the source position in front of the vessel’s stern. A number of
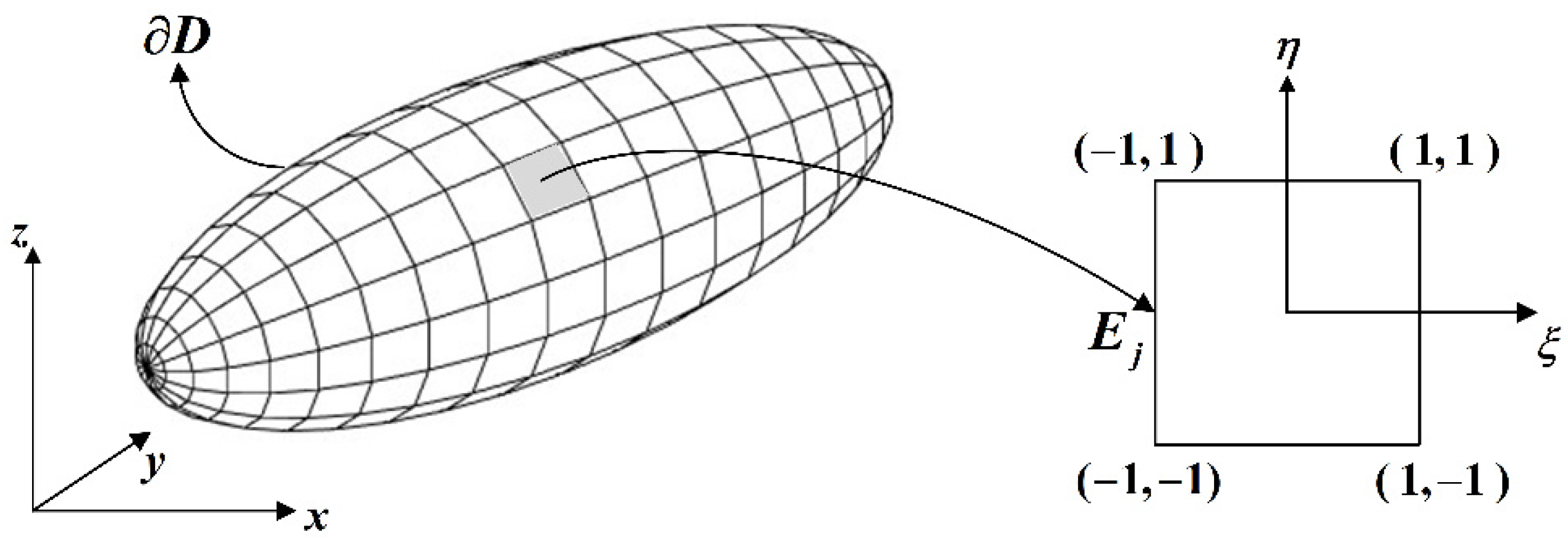
elements have been used for the discretization of the ellipsoid in the BEM method, which has been proven to be enough for the numerical convergence of the results at the considered source frequency.
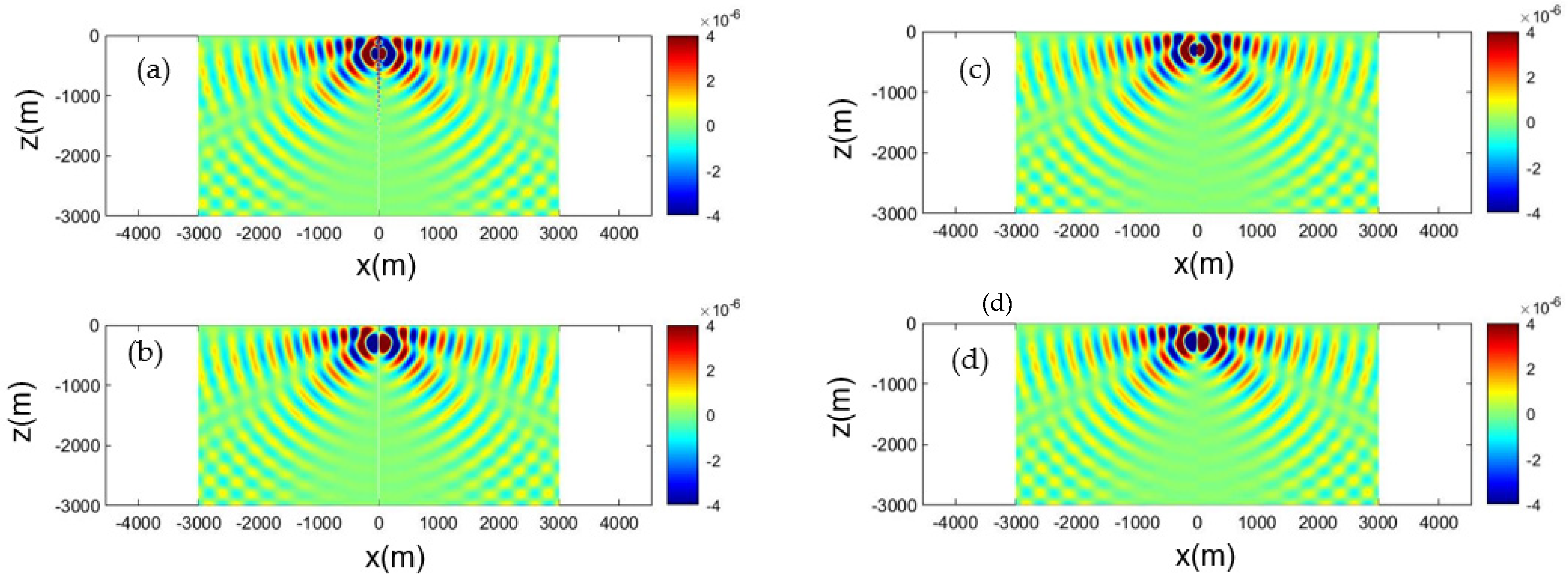
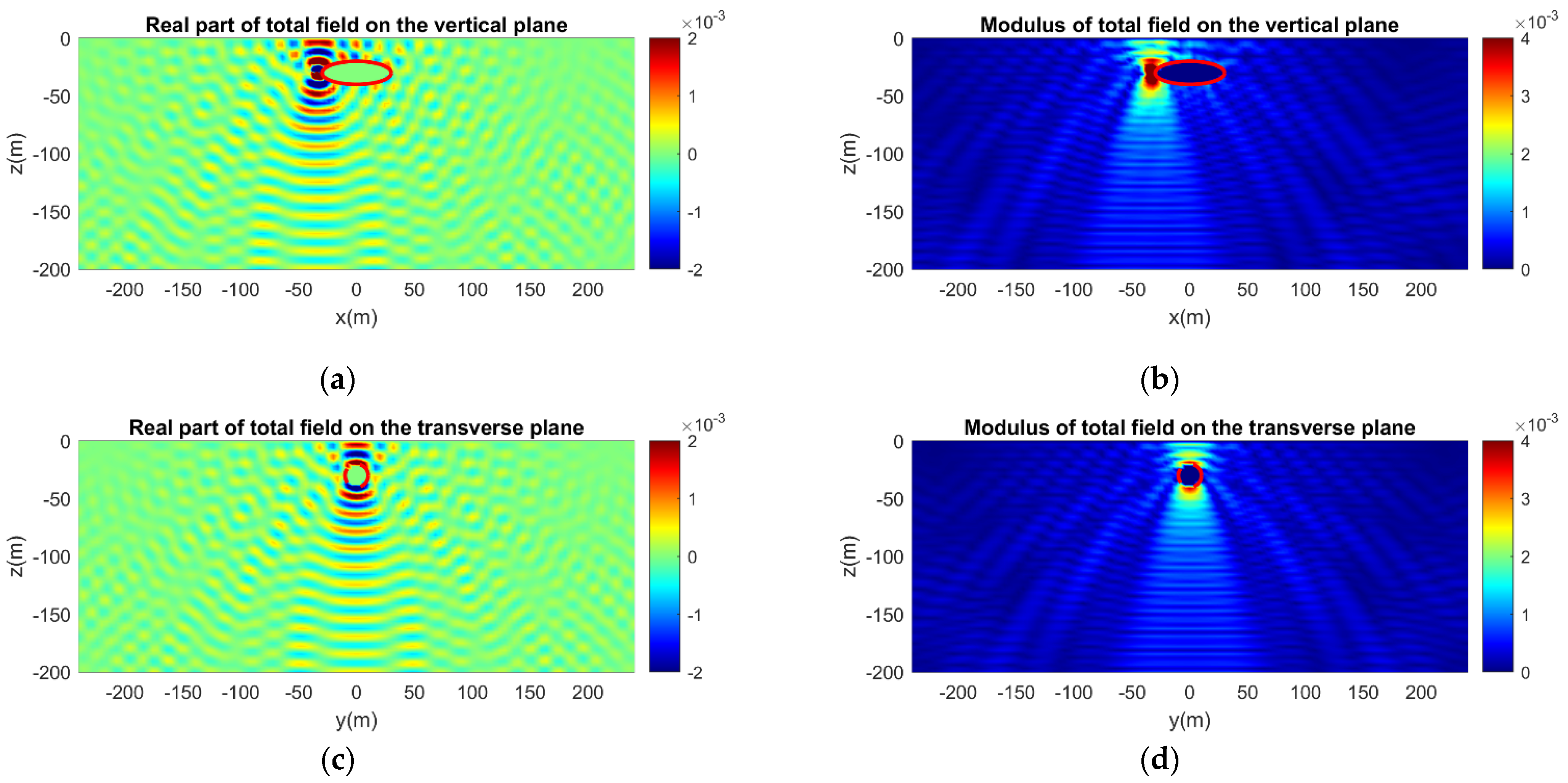
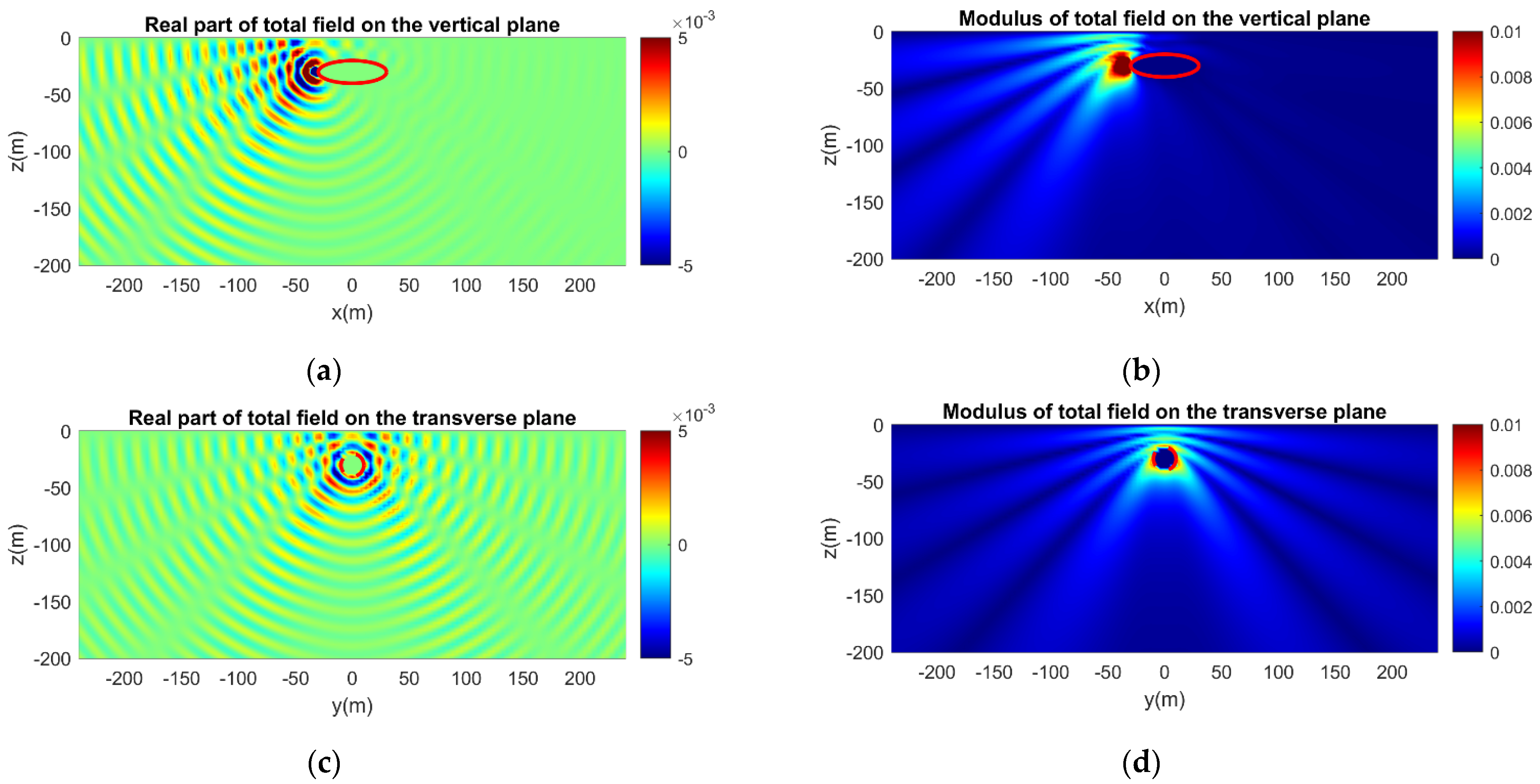
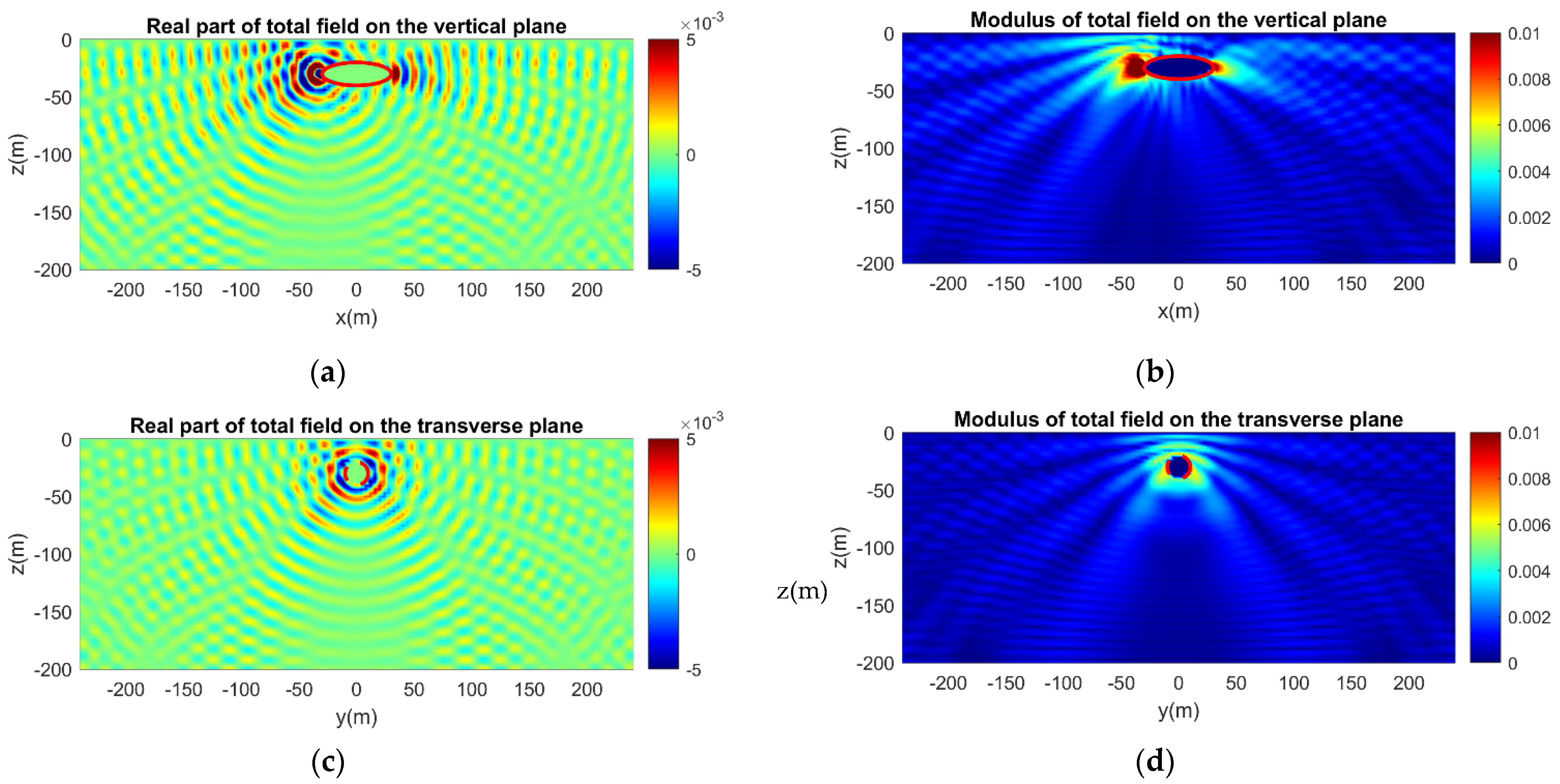
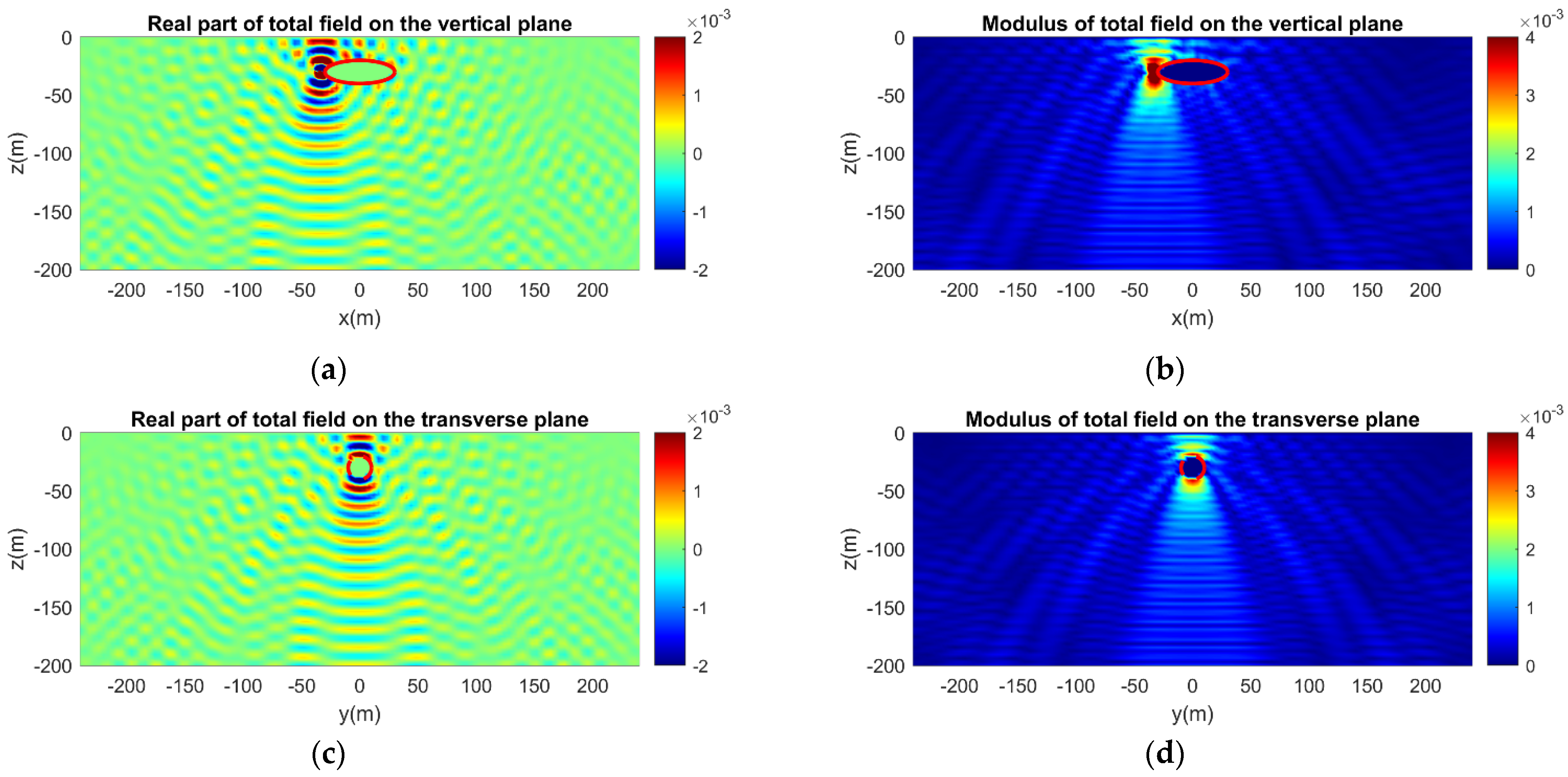
In
Figure 9, the acoustic field for a monopole source is presented initially for the scattering problem in the vertically semi-infinite waveguide. The comparison with
Figure 10 reveals the effect of the rigid sea bottom as the reflected waves disturb the initial smooth pattern of the acoustic field and reinforce the scattering effect around the vessel prow. Induced variations are evident in both the real part and the modulus of the acoustic field.
In
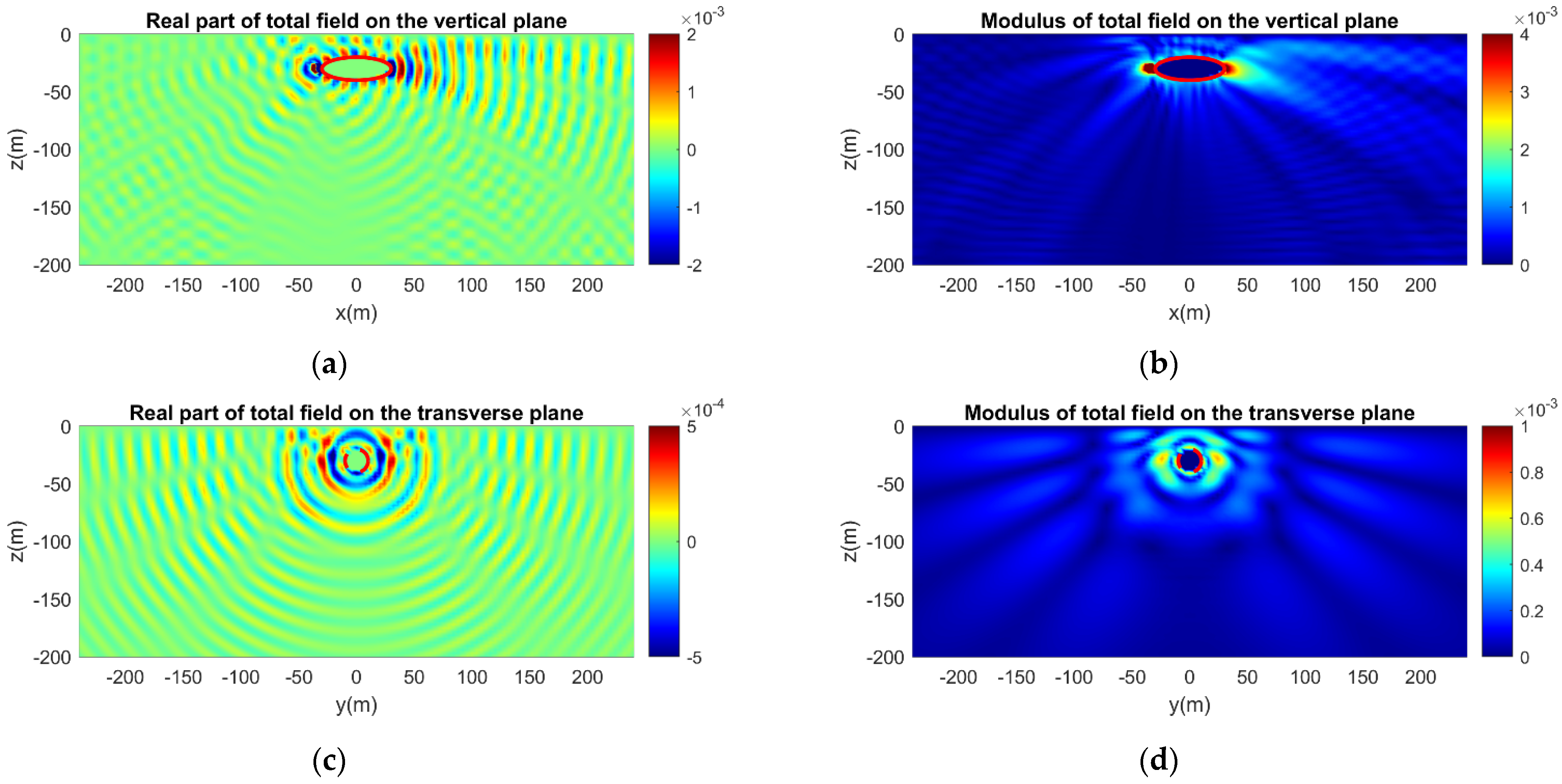
Figure 11, the excitation comes from a horizontal dipole source and the two-lobe pattern in the region close to the source is reproduced. In general, the sound levels are lower compared to those of the monopole sound source; therefore, a different scale is implemented in order to properly depict the sound variations. In the transverse plane, the incident field from the horizontal dipole is zero and the acoustic field is only composed of the scattered field and the sea bottom reflections. Additionally, as shown in the vertical plane results, the sound reflected by the sea bottom right under the dipole position is negligible. As a result, the sound levels are significantly lower and the pattern is rather smooth in the transverse plane. In
Figure 12, the excitation comes from a vertical dipole source and now the directivity of the two-lobe pattern changes, displaying maximum radiation in the vertical direction. The effect of the rigid sea bottom is, thus, increased and is reflected with more intense variations of both the real part and the modulus in the direction of the dipole axis.
Figure 13,
Figure 14,
Figure 15 and
Figure 16 correspond to the same cases as
Figure 9,
Figure 10,
Figure 11 and
Figure 12, but the ellipsoid is now acoustically soft. Again, the calculated acoustic field is initially presented for the semi-infinite waveguide when the excitation is a monopole source (
Figure 13). Compared to the acoustically hard ellipsoid (
Figure 9,
Figure 10,
Figure 11 and
Figure 12), the effect of scattering is less intense, as depicted in both the real part and the modulus of the calculated acoustic field around the ellipsoid. This is justified by the acoustic behavior of the soft ellipsoid. Similar results are obtained for the horizontal and the vertical dipole sources (
Figure 15 and
Figure 16). Again, the presence of the acoustically soft ellipsoid results in less scattering and less influence on the total sound field. In both types of dipole sources, the two-lobe pattern is distinguishable, exhibiting the directivity along the dipole axis.
The effect of the vehicle hull on the directivity of generated noise is clearly observed by comparing the field of the monopole source presented in
Figure 9a and
Figure 10a, in the case of a hard and soft hull boundary, respectively, with
Figure 4a, concerning the same result without the presence of the vehicle. Similarly, the changes due to the scattering effect of the vessel in the directivity characteristics of noise from the corresponding dipole sources can be observed by comparing the field presented in
Figure 11a with
Figure 5a for the horizontal dipole source, and in
Figure 12a with
Figure 6a concerning the vertical dipole, respectively.
Moreover, an important consequence of the free-surface boundary condition which is included in the present formulation is the Lloyd Mirror effect that is clearly depicted in
Figure 9,
Figure 11 and
Figure 14 in the subplots illustrating the total acoustic field on the vertical plane emitted by the monopole, horizontal, and vertical dipole sources, respectively.
6. Conclusions
In this work, we consider the generation of noise by biomimetic flapping thrusters that are used for the propulsion of small marine vessels and AUVs and their directivity pattern, including the scattering, free-surface, and seabed effects, which are important for the characterization of the acoustic spectra to be subsequently used for sound propagation in the underwater sea environment. Focusing on the low-frequency band, the generating monopole and dipole source terms of the FW-H equation associated with the hydrodynamic noise by the biomimetic thruster are considered, providing the corresponding data for the Helmholtz equation for treating the three-dimensional scattering problem in the ocean acoustic waveguide in the frequency domain. Next, a 3D BEM model is developed and applied to calculate the scattering field, which together with the previous source field data provides us with the complete acoustic pattern in the neighborhood of the vessel. This could be further exploited for calculating the propagation of the acoustic field to far distances in the waveguide and evaluate the noise footprint of such systems in the sea environment. The numerical results are presented in selected cases, illustrating that the vessel hull geometry and acoustic properties of its surface, as well as the sea surface and seabed effects, are important for the determination of the directionality of the generated noise, which could significantly affect the long-range propagation to various azimuthal directions in the underwater ocean environment. Future work will be directed towards the inclusion of the effects of various other important parameters, such as the medium inhomogeneity, the variable bottom topography, and the seabed acoustic properties.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}