
Formation Control of Multiple Underactuated Surface Vessels with a Disturbance Observer

Abstract
:1. Introduction
2. Problem Formulation and Tracking Strategy
2.1. Dynamics Model of the USV
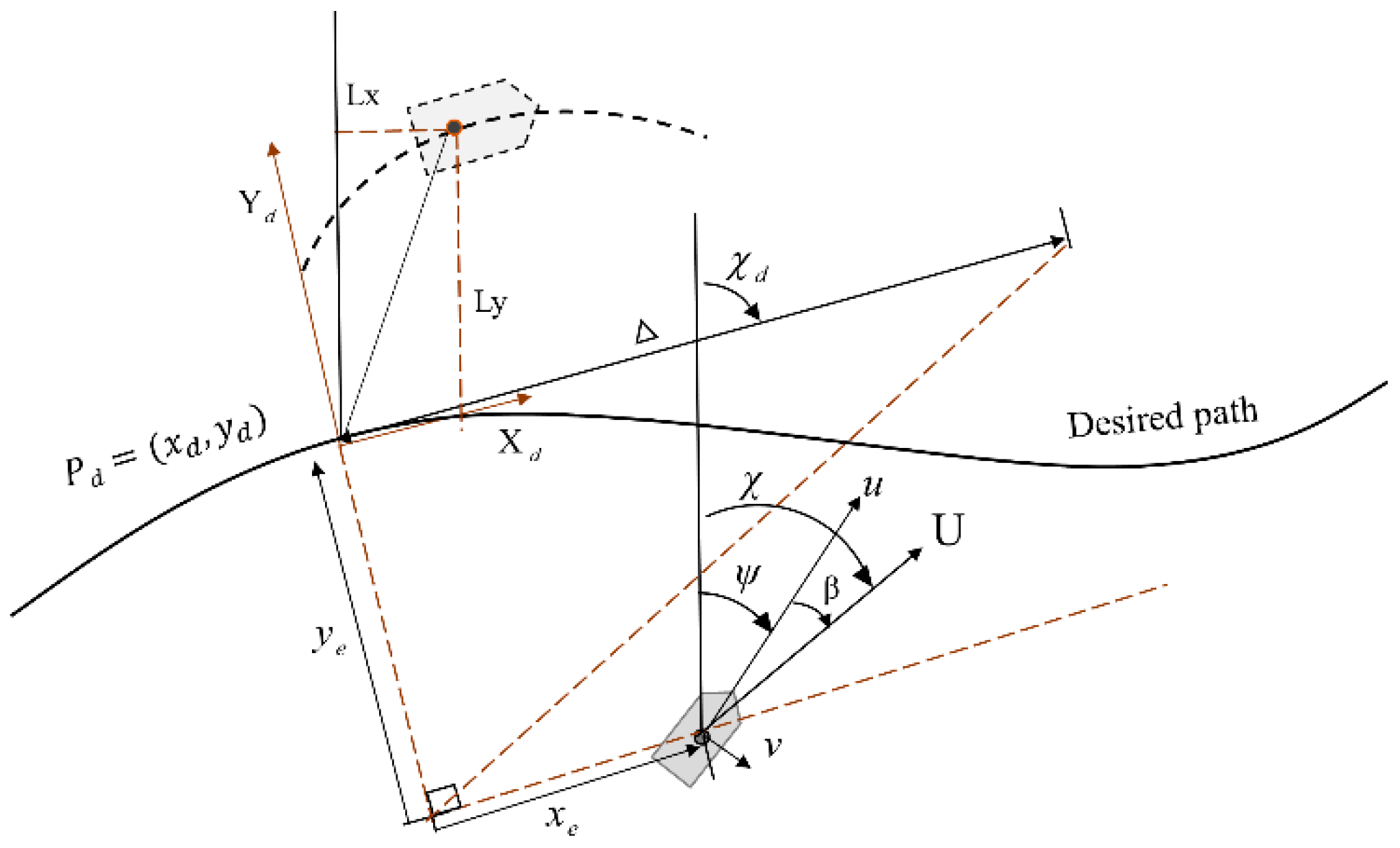
2.2. Path Tracking Strategy Design
3. Controller System Design
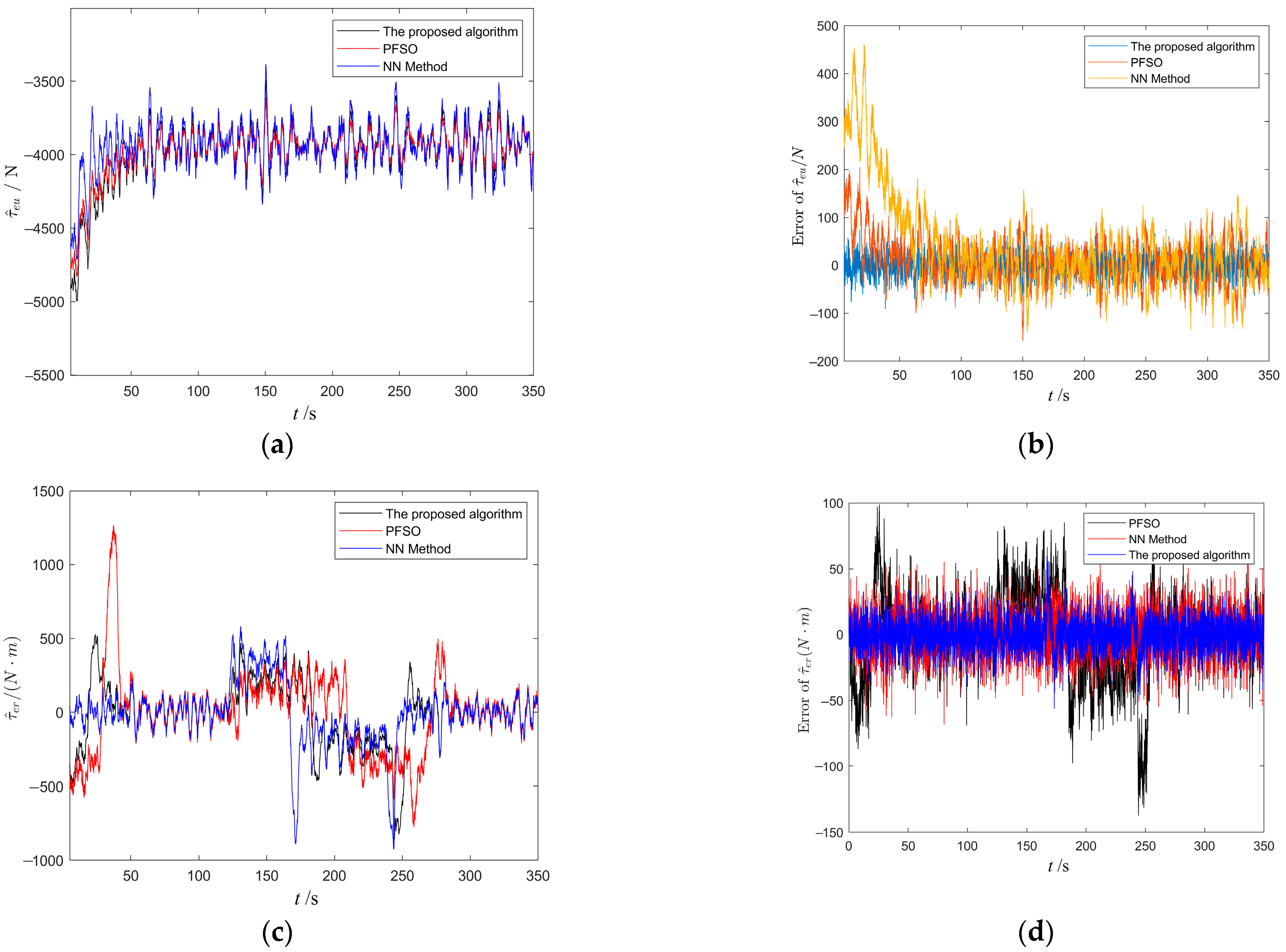
3.1. Disturbance Observer Design
3.2. Controller Design
3.2.1. Kinematics Controller
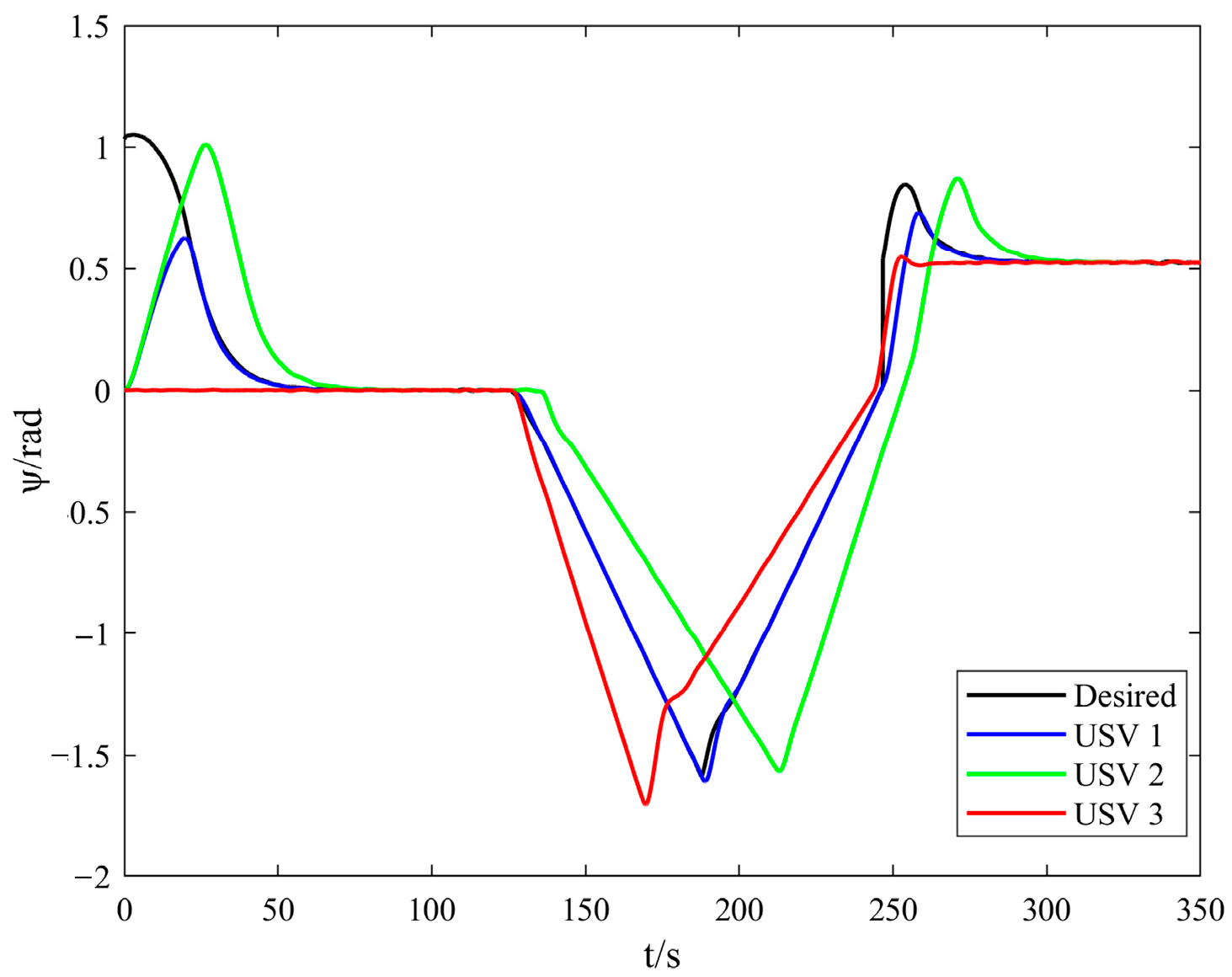
3.2.2. Heading Angle Control
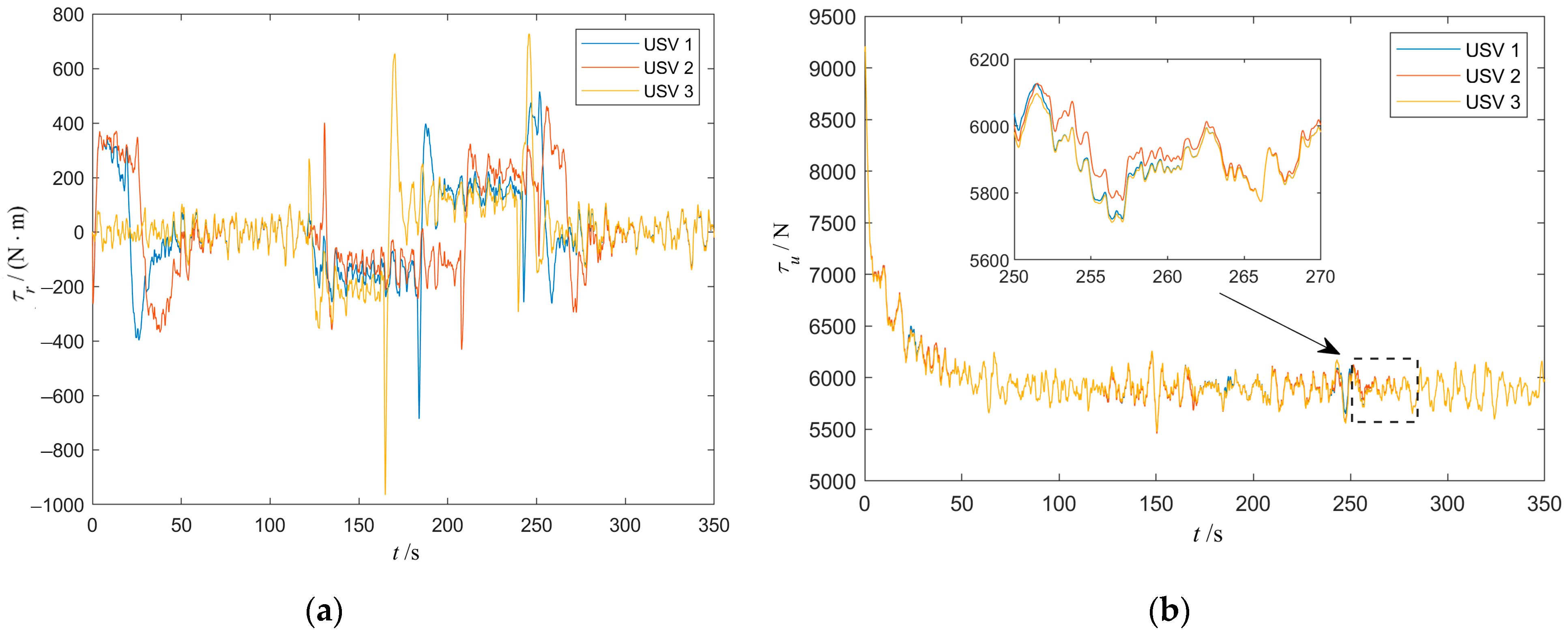
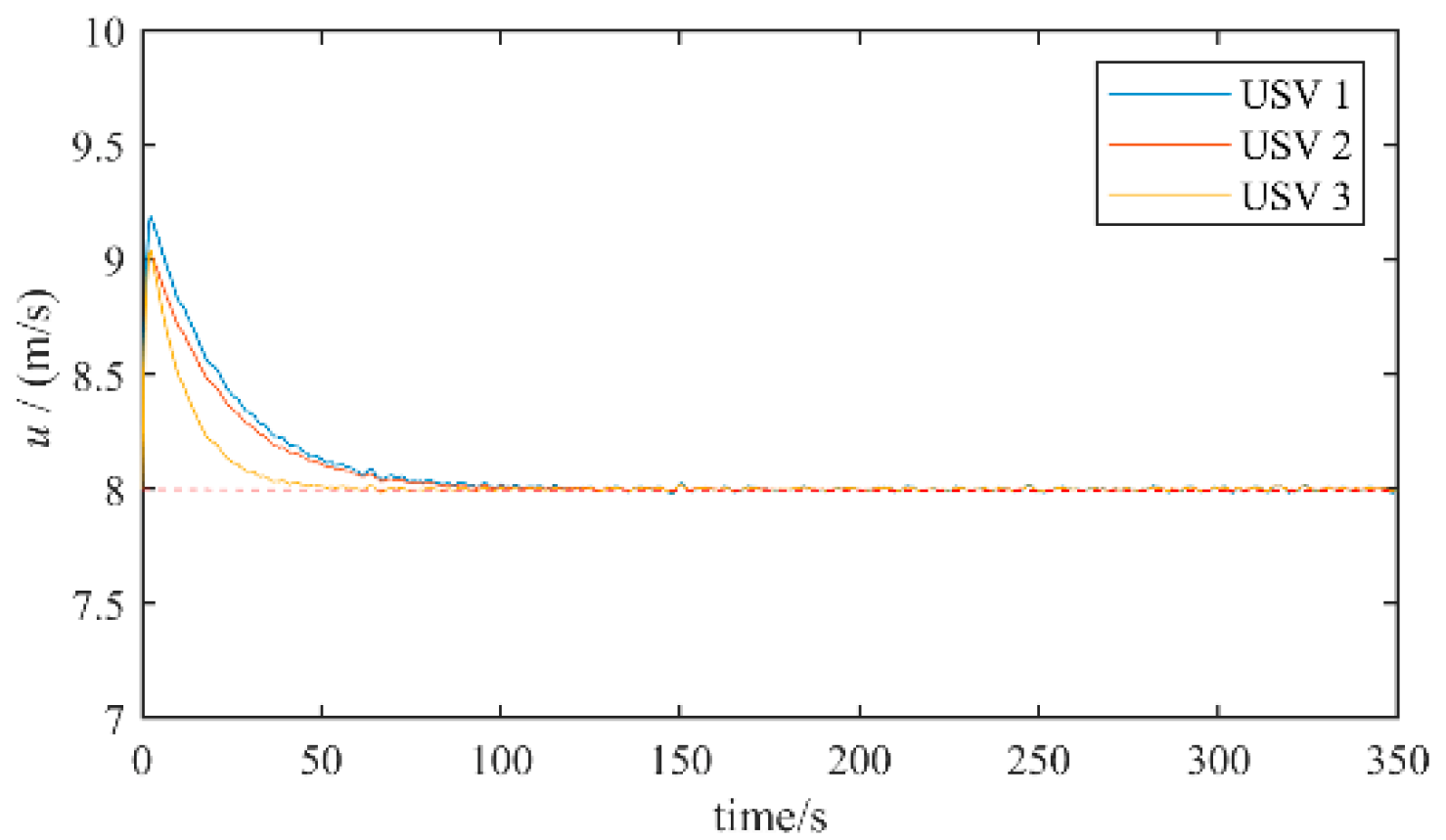
3.2.3. Surge Control
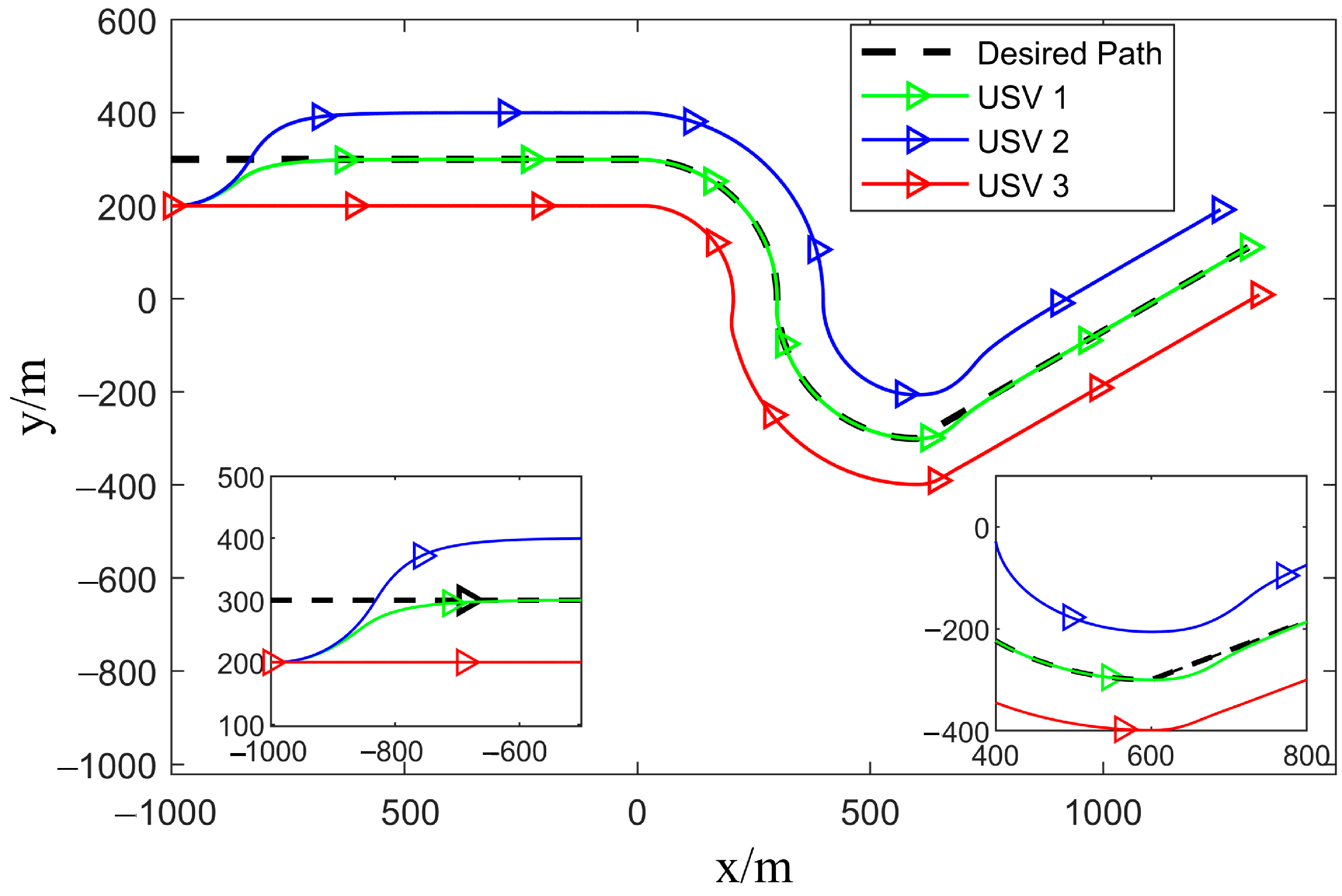
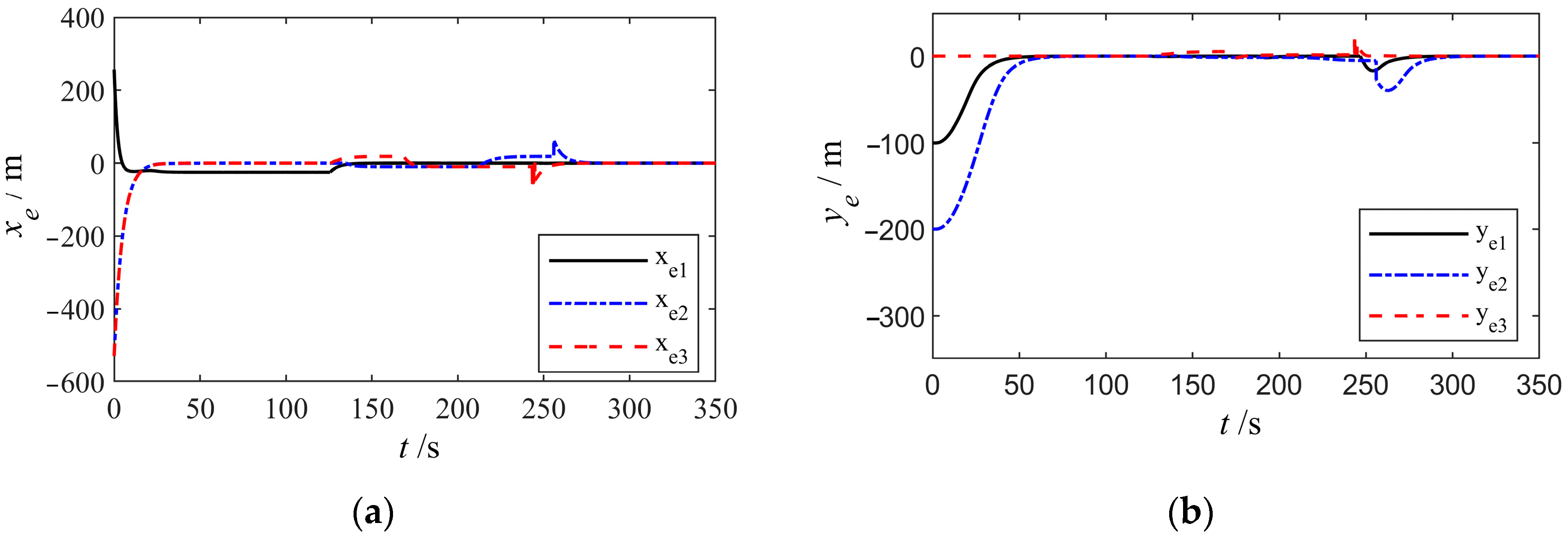
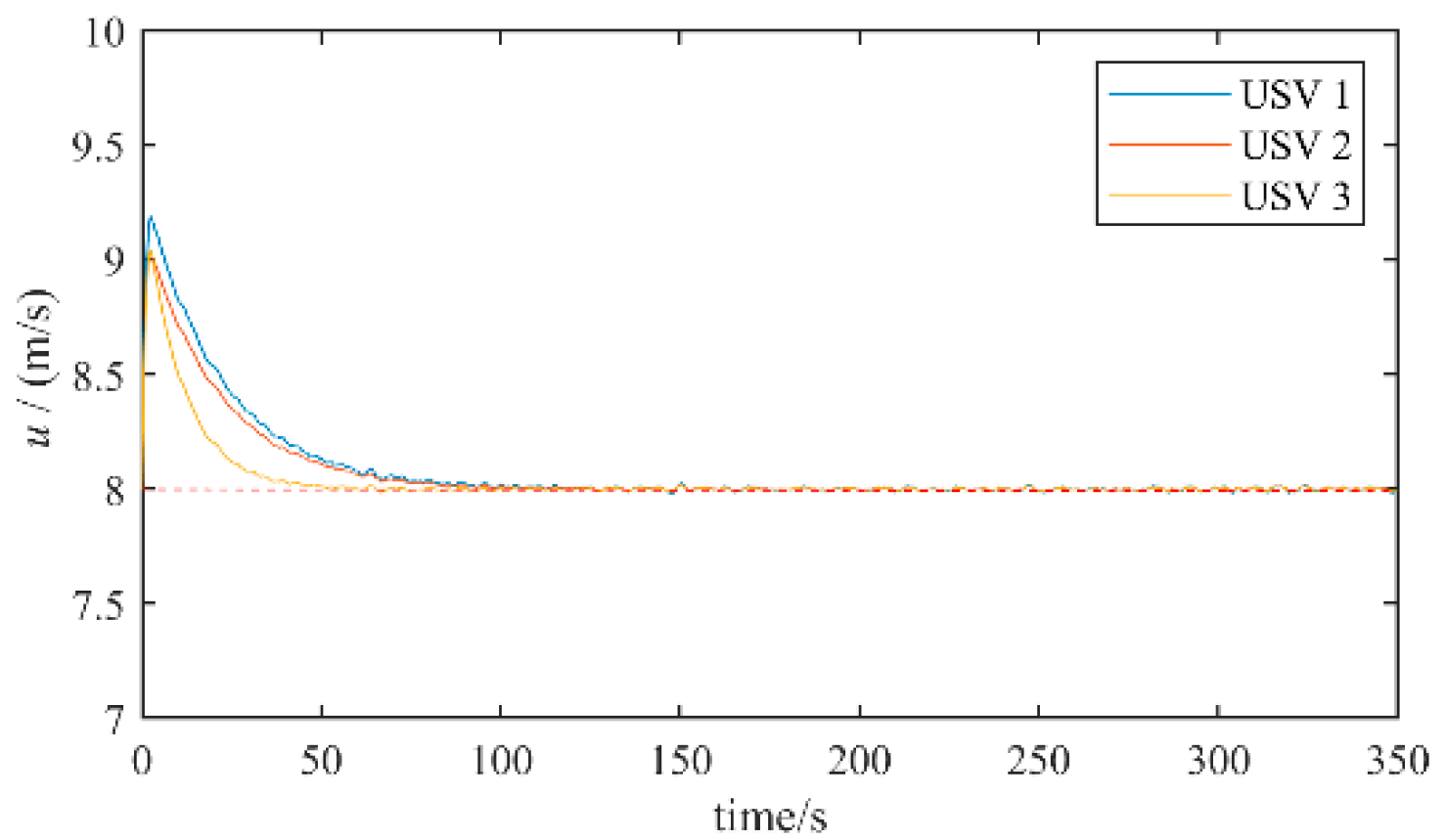
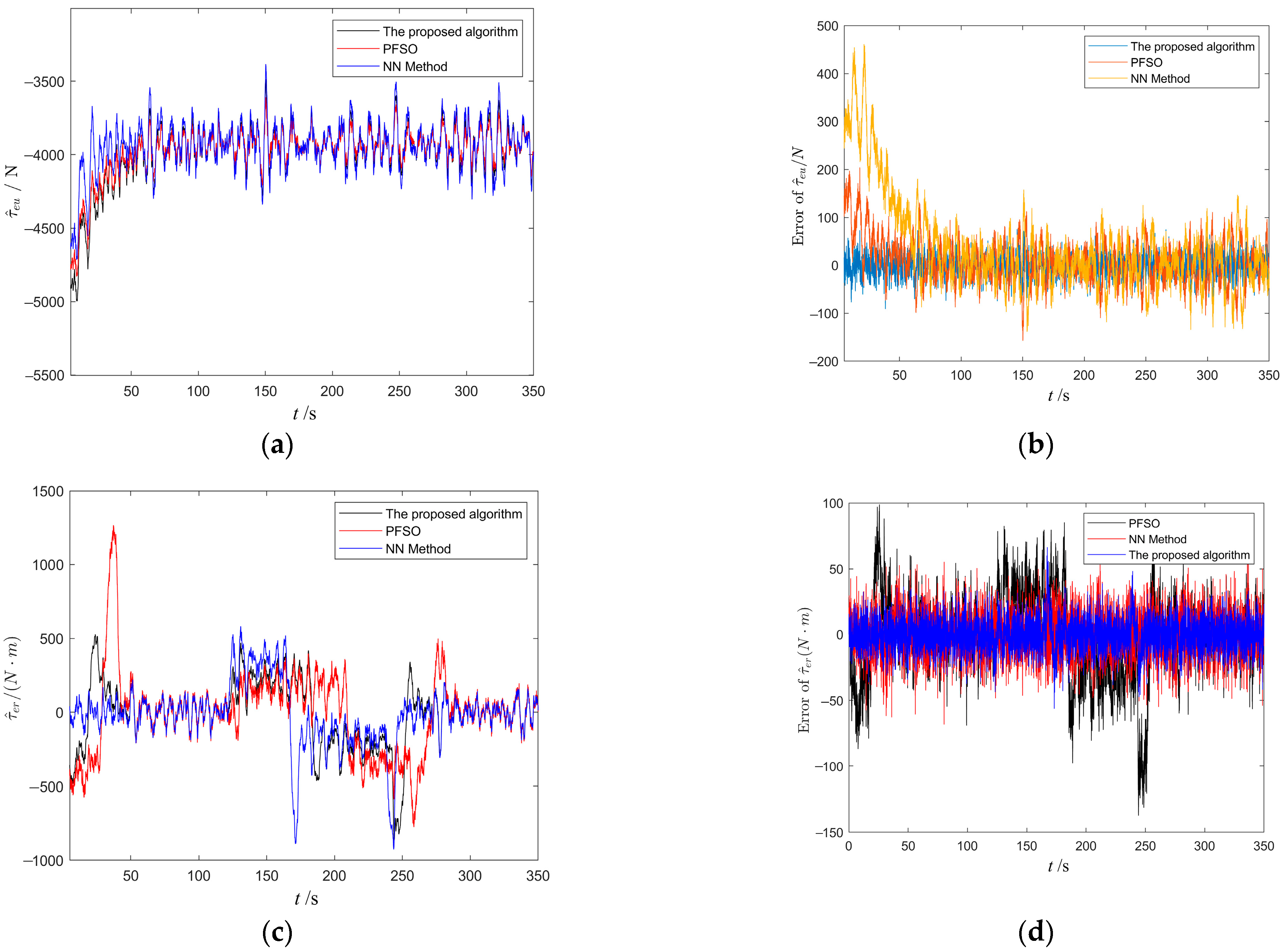
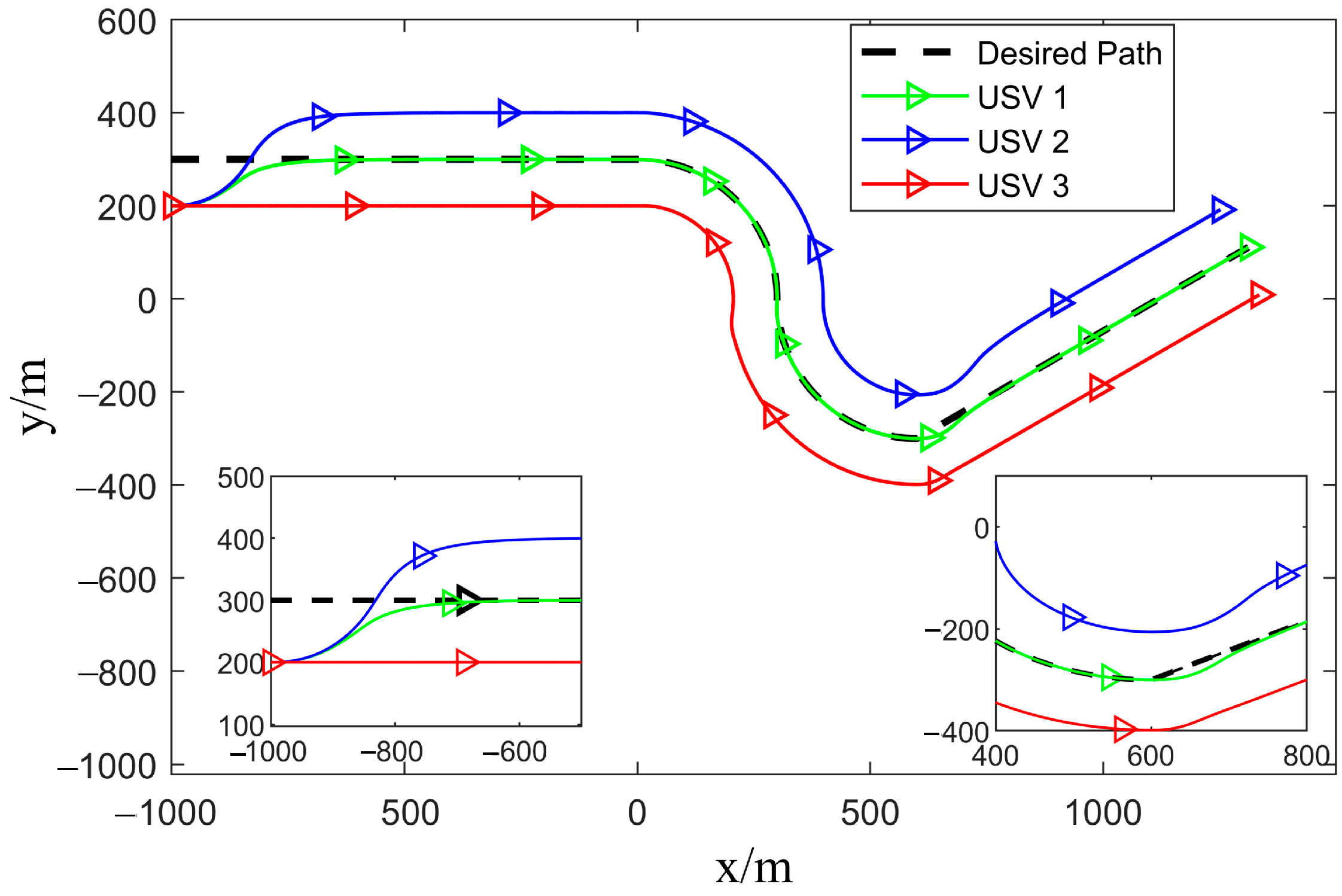
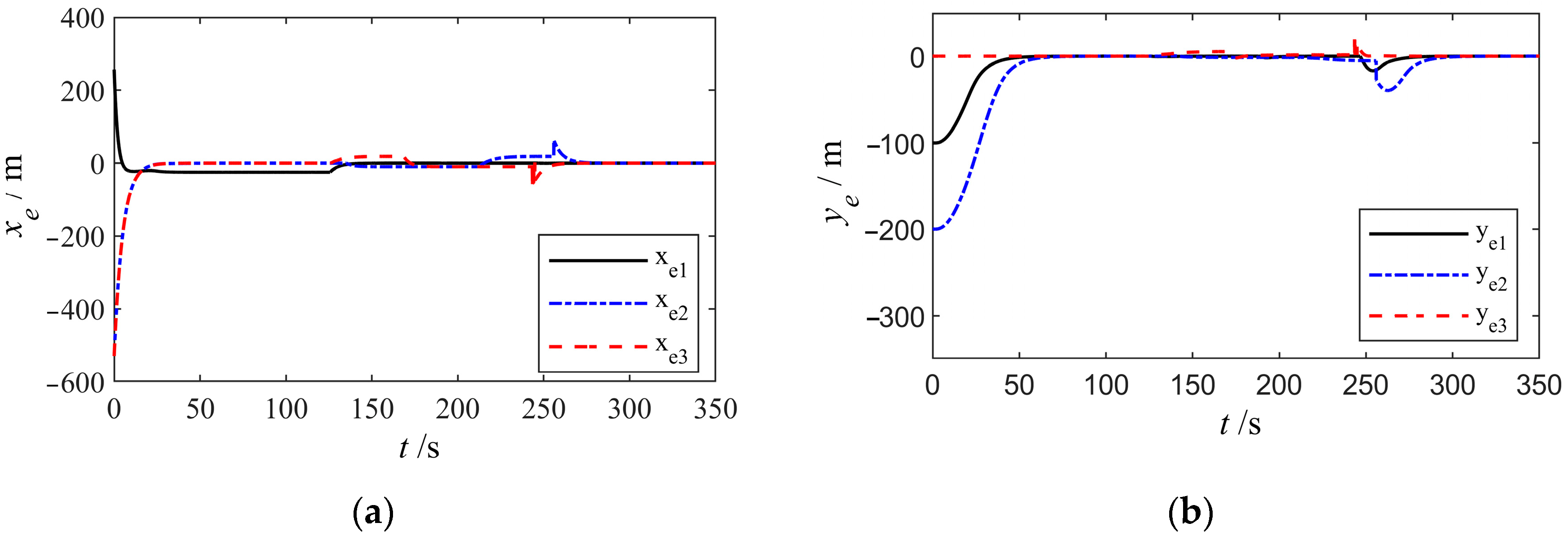
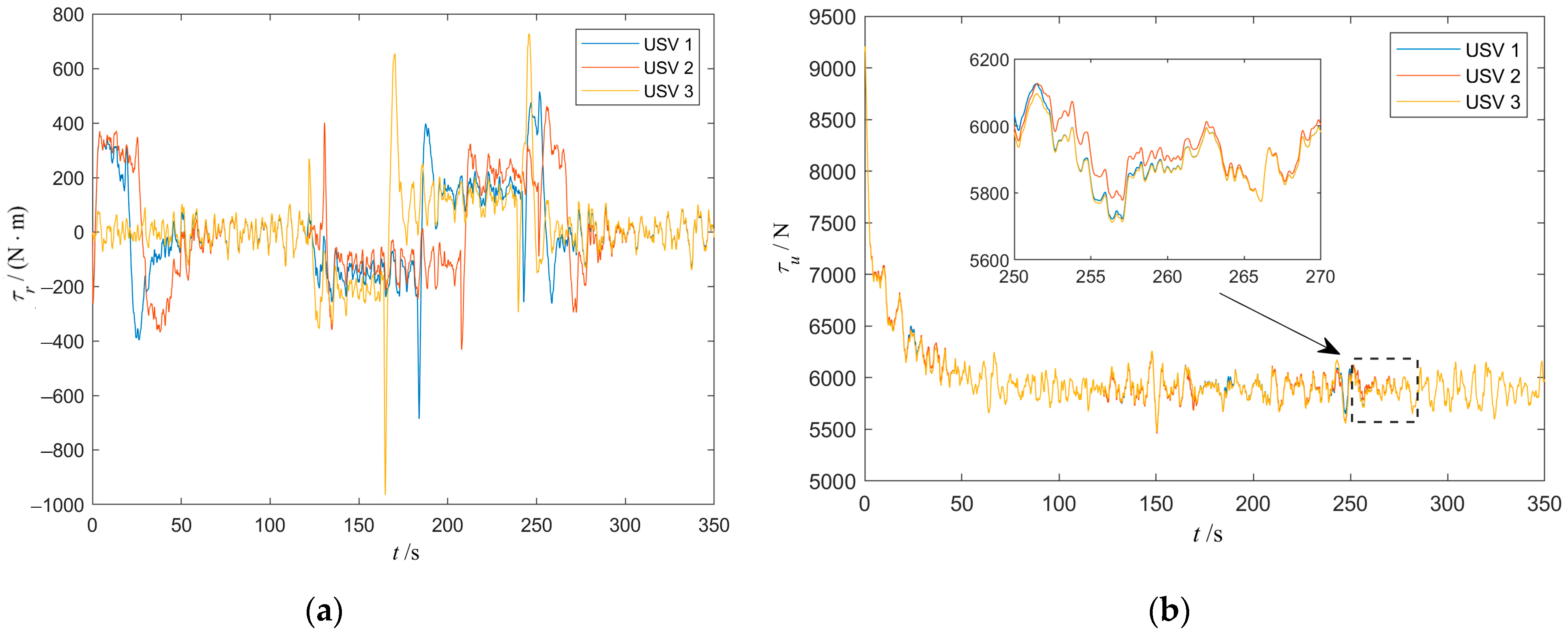
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Selvakumar, J.; Bakolas, E. Feedback Strategies for a Reach-Avoid Game with a Single Evader and Multiple Pursuers. IEEE Trans. Cybern. 2021, 51, 696–707. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Chen, L.; Guo, Y.; Lyu, Y. Cooperative surrounding control with collision avoidance for networked Lagrangian systems. J. Frankl. Inst. 2018, 355, 5182–5202. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, G.; Sun, Z.; Zhang, W. Adaptive cooperative formation control of autonomous surface vessels with uncertain dynamics and external disturbances. Ocean Eng. 2018, 167, 36–44. [Google Scholar] [CrossRef]
- Miao, Z.; Wang, Y.; Fierro, R. Cooperative circumnavigation of a moving target with multiple nonholonomic robots using backstepping design. Syst. Control Lett. 2017, 103, 58–65. [Google Scholar] [CrossRef]
- Qu, X.; Liang, X.; Hou, Y. Fuzzy State Observer-Based Cooperative Path-Following Control of Autonomous Underwater Vehicles with Unknown Dynamics and Ocean Disturbances. Int. J. Fuzzy Syst. 2021, 23, 1849–1859. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. A Decentralized Cooperative Control Scheme with Obstacle Avoidance for a Team of Mobile Robots. IEEE Trans. Ind. Electron. 2014, 61, 347–354. [Google Scholar] [CrossRef]
- Wu, D.; Yan, Z.; Chen, T. Cooperative current estimation based multi-AUVs localization for deep ocean applications. Ocean Eng. 2019, 188, 106148. [Google Scholar] [CrossRef]
- Sun, Z.; Sun, H.; Li, P.; Zou, J.; Zhuang, J.; Tan, G. An innovative distributed self-organizing control of unmanned surface vehicle swarm with collision avoidance. Ocean Eng. 2022, 254, 111342. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, Y.; Cui, J.; Li, X.; Pu, H.; Gu, J.; Xie, S.; Luo, J. Development of the USV ‘JingHai-I’ and sea trials in the Southern Yellow Sea. Ocean Eng. 2017, 131, 186–196. [Google Scholar] [CrossRef]
- Tan, G.; Zhuang, J.; Zou, J.; Wan, L.; Sun, Z. Artificial potential field-based swarm finding of the unmanned surface vehicles in the dynamic ocean environment. Int. J. Adv. Robot. Syst. 2020, 17, 172988142092530. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Nanmkyum, I.; Zhang, G.; Zhang, Q. Adaptive fuzzy tracking control for underactuated surface vessels with unmodeled dynamics and input saturation. ISA Trans. 2020, 103, 52–62. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Lu, Y.; Zhang, W. Leader-follower formation control of underactuated surface vehicles based on sliding mode control and parameter estimation. ISA Trans. 2018, 72, 15–24. [Google Scholar] [CrossRef] [PubMed]
- Gu, N.; Wang, D.; Peng, Z.; Liu, L. Adaptive bounded neural network control for coordinated path-following of networked underactuated autonomous surface vehicles under time-varying state-dependent cyber-attack. ISA Trans. 2020, 104, 212–221. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Fu, M. Adaptive Formation Control for Waterjet USV with Input and Output Constraints Based on Bioinspired Neurodynamics. IEEE Access 2019, 7, 165852–165861. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, S.; Yan, Y. Fixed-time velocity-free sliding mode tracking control for marine surface vessels with uncertainties and unknown actuator faults. Ocean Eng. 2020, 201, 107107. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wan, L.; Ma, Q. Three-Dimensional Path Following of an Underactuated AUV Based on Fuzzy Backstepping Sliding Mode Control. Int. J. Fuzzy Syst. 2017, 20, 640–649. [Google Scholar] [CrossRef]
- Rodríguez, L.; Castillo, O.; Soria, J.; Melin, P.; Valdez, F.; Gonzalez, C.I.; Martinez, G.E.; Soto, J. A fuzzy hierarchical operator in the grey wolf optimizer algorithm. Appl. Soft Comput. 2017, 57, 315–328. [Google Scholar] [CrossRef]
- Hu, X.; Wei, X.; Han, J.; Zhang, Q. Adaptive disturbance rejection for course tracking of marine vessels under actuator constraint. ISA Trans. 2020, 100, 82–91. [Google Scholar] [CrossRef]
- Qu, X.; Liang, X.; Hou, Y.; Li, Y.; Zhang, R. Path-following control of unmanned surface vehicles with unknown dynamics and unmeasured velocities. J. Mar. Sci. Technol. 2021, 26, 395–407. [Google Scholar] [CrossRef]
- Shoja, S.; Baradarannia, M.; Hashemzadeh, F.; Badamchizadeh, M.; Bagheri, P. Surrounding control of nonlinear multi-agent systems with non-identical agents. ISA Trans. 2017, 70, 219–227. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Sun, Z.; Yin, J.; Zou, Z.; Su, S.-F. Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns. Ocean Eng. 2019, 176, 57–64. [Google Scholar] [CrossRef]
- Song, W.; Wang, J.; Zhao, S.; Shan, J. Event-triggered cooperative unscented Kalman filtering and its application in multi-UAV systems. Automatica 2019, 105, 264–273. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Han, L.; Li, Q.; Ren, Z. Practical time-varying output formation tracking for high-order nonlinear strict-feedback multi-agent systems with input saturation. ISA Trans. 2020, 98, 63–74. [Google Scholar] [CrossRef]
- Jia, Z.; Hu, Z.; Zhang, W. Adaptive output-feedback control with prescribed performance for trajectory tracking of underactuated surface vessels. ISA Trans. 2019, 95, 18–26. [Google Scholar] [CrossRef]
- Van, M. An enhanced tracking control of marine surface vessels based on adaptive integral sliding mode control and disturbance observer. ISA Trans. 2019, 90, 30–40. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Yu, D.; Liu, L. Automatic Leader-Follower Persistent Formation Control for Autonomous Surface Vehicles. IEEE Access 2019, 7, 12146–12155. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, J. Real-time collision avoidance planning for unmanned surface vessels based on field theory. ISA Trans. 2020, 106, 233–242. [Google Scholar] [CrossRef]
- Ni, J.; Yang, S.X. Bioinspired neural network for real-time cooperative hunting by multirobots in unknown environments. IEEE Trans. Neural Netw. 2011, 22, 2062–2077. [Google Scholar]
- Dong, X.; Hu, G. Time-Varying Formation Tracking for Linear Multiagent Systems with Multiple Leaders. IEEE Trans. Autom. Control 2017, 62, 3658–3664. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wang, N.; Li, Y.; Zhang, R. A Novel Distributed and Self-Organized Swarm Control Framework for Underactuated Unmanned Marine Vehicles. IEEE Access 2019, 7, 112703–112712. [Google Scholar] [CrossRef]
- Rego, F.C.; Hung, N.T.; Jones, C.N.; Pascoal, A.M.; Aguiar, A.P.; Sharma, S.; Subudhi, B. Cooperative path-following control with logic-based communications: Theory and practice. Navig. Control Auton. Mar. Veh. 2019, 187–224. [Google Scholar] [CrossRef]
- Qu, Y.; Xiao, B.; Fu, Z.; Yuan, D. Trajectory exponential tracking control of unmanned surface ships with external disturbance and system uncertainties. ISA Trans. 2018, 78, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Wang, D.; Peng, Z.; Li, T. Modular Adaptive Control for LOS-Based Cooperative Path Maneuvering of Multiple Underactuated Autonomous Surface Vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1613–1624. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Overall length (m) | 5.2 |
| m11 (kg) | 2403 |
| m22 (kg) | 3350 |
| m33 (kg) | 24,896 |
| d11 (kg/s) | 24.5 + 50|u| |
| d22 (kg/s) | 580 + 450|v| |
| d33 (kg/s) | 1420 + 1250|r| |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| ker | 10 | ku | 2.5 |
| keu | 10 | 0.5 | |
| kev | 10 | kτr | 0.2 |
| Δ(m) | 50 | kx | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Sun, H.; Li, P.; Zou, J. Formation Control of Multiple Underactuated Surface Vessels with a Disturbance Observer. J. Mar. Sci. Eng. 2022, 10, 1016. https://doi.org/10.3390/jmse10081016
Sun Z, Sun H, Li P, Zou J. Formation Control of Multiple Underactuated Surface Vessels with a Disturbance Observer. Journal of Marine Science and Engineering. 2022; 10(8):1016. https://doi.org/10.3390/jmse10081016
Chicago/Turabian StyleSun, Zhiyuan, Hanbing Sun, Ping Li, and Jin Zou. 2022. "Formation Control of Multiple Underactuated Surface Vessels with a Disturbance Observer" Journal of Marine Science and Engineering 10, no. 8: 1016. https://doi.org/10.3390/jmse10081016
APA StyleSun, Z., Sun, H., Li, P., & Zou, J. (2022). Formation Control of Multiple Underactuated Surface Vessels with a Disturbance Observer. Journal of Marine Science and Engineering, 10(8), 1016. https://doi.org/10.3390/jmse10081016