5.1. Analysis of Open-Water Performance of Water Jet Propeller under Mooring Conditions
Six speeds (i.e., 1650, 1800, 2000, 2200, 2450 and 2600 r/min) were selected for the quasi-steady-state numerical prediction conditions of the water jet propeller. Three working conditions, 1650, 2000 and 2450, were selected for the flow field analysis.
The performances of the same type of intake channel in different situations are different. The magnitude of the rotational speed under mooring conditions affects the diffusion rate of the flow and the intake channel suction capacity to some extent [
25]. The inlet channel pressure distribution and outflow are not uniform due to the influence of various factors, such as inlet channel bending and propulsion pump shaft disturbance. The water jet propulsion pump inlet cross-section is the flow channel outlet cross-section, and the schematic diagram is shown in
Figure 7.
Figure 8;
Figure 9 show the axial velocity and total pressure distribution of the propulsion pump inlet, respectively. The high-speed distribution area and total pressure increased as the speed propulsion pump inlet cross-sectional speed increased. The velocity and total pressure around the pump shaft are symmetrically distributed. The sub-high-speed area at the top of the pump shaft corresponds to the low-pressure area shown in
Figure 9. This is because of the impeding effect of the drive shaft on the water flow, making the velocity in the area around the paddle shaft lower than the area at the edge of the disk. The low-speed zone below the pump shaft corresponds to the high-pressure zone shown in
Figure 9. The distribution area grows as the speed increases due to the backflow characteristics in the flow channel under mooring conditions. The larger the rotation speed, the higher the velocity gradient variation and the low-speed region range grows, which is a similar phenomenon as in the simulation of the water jet propulsion ship model. The main causes of uneven inlet and outlet flow are the effects of boundary water intake, water deceleration and return, the transition zone of the inlet channel bend, and the obstruction of the water flow by the drive shaft. The boundary water intake depends on the boundary layer intake flow, and the boundary layer intake ratio increases as the speed increases. The flow velocity gradient decreased, resulting in increased water uniformity. The drive shaft has an obstructive effect on the water flow, and there is a narrow reverse low-velocity zone around the drive shaft in the figure, affecting the uniformity of the outlet velocity distribution.
The axial velocity distribution in the middle and longitudinal sections at different rotational speeds under mooring conditions is shown in
Figure 10. Some of the fluids on the lip of the flow channel experience backflow because the transition of the lip is not smooth enough and flow separation occurs. Simultaneously, the reflux phenomenon at the lower edge of the transition section of the flow channel under mooring conditions also increases the influence of flow separation. The upper side of the lip forms an apparent low-velocity zone. The axial velocity at the device flow channel inlet area is low, and the velocity increases along the pumped water flow direction. In the straight pipe area following the fluid flow into the bend, the velocity variation shows uneven velocity distributions above and below the pump shaft. Near the pump shaft, the flow velocity is low. Far from the pump shaft, the flow velocities are higher (above as well as below the pump shaft).
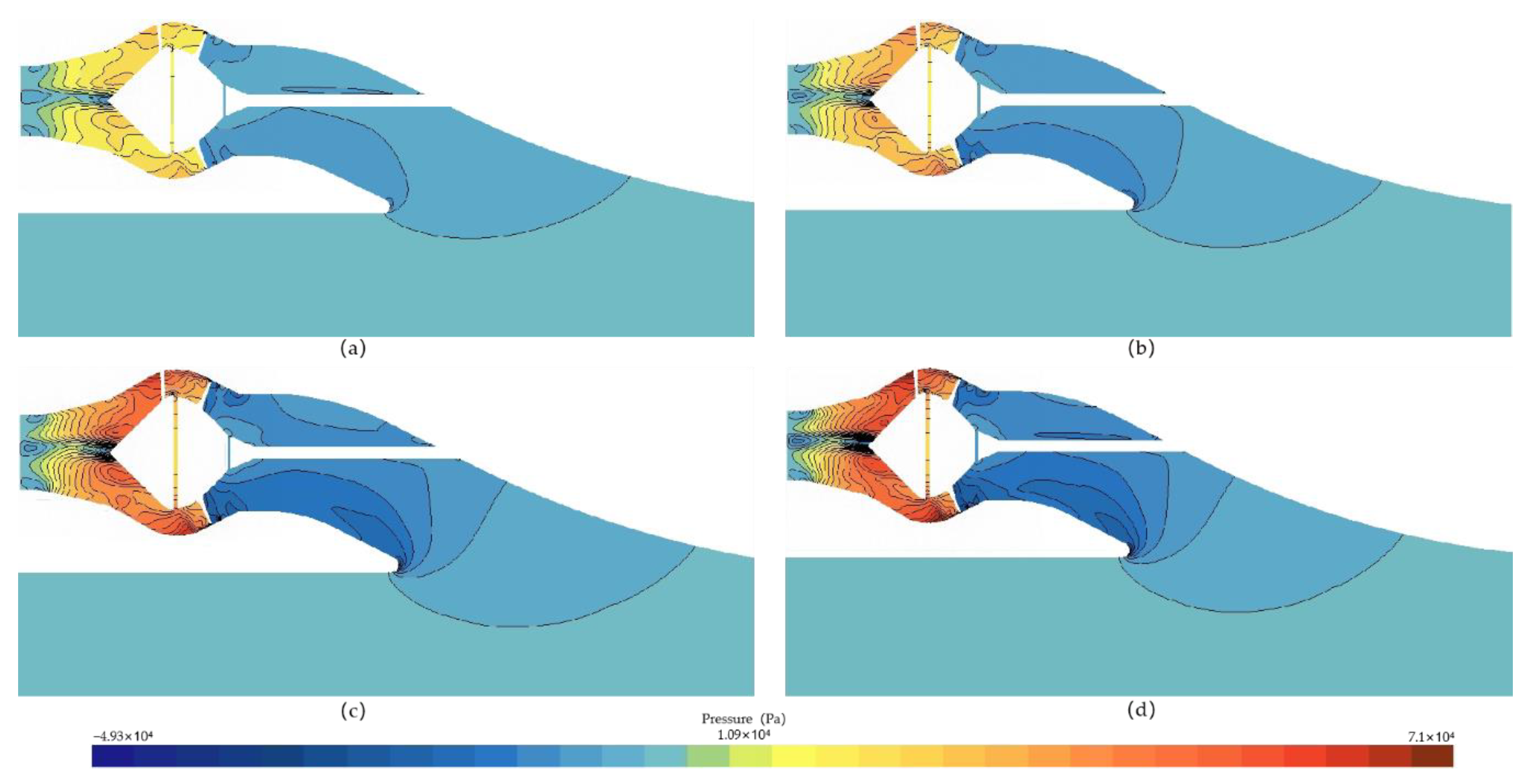
Figure 11 shows the pressure distribution in the middle longitudinal section along the central axis of the pump at variable rotational speeds. The pressure at the slope and lip angle changes more apparently with the rotational speed. The pressure minima in the inlet flow channel are mainly distributed at the lip angle, the bend transition, and the ramp, while cavitation may occur in combination with the flow separation condition of the return flow and the lip angle. The post-impeller region is subjected to higher pressure, which increases as the rotational speed increases. At the nozzle, the pressure distribution is not uniform because the pressure outlet is set, but all exist in the low-pressure region relative to the pump section. As the rotational speed increases, the more uniform the pressure received by the flow path.
The analysis of the quasi-steady state numerical prediction of the water jet propeller at variable speeds is presented below. The hydrodynamic characteristic curves of the water jet propeller are plotted as shown in
Figure 12.
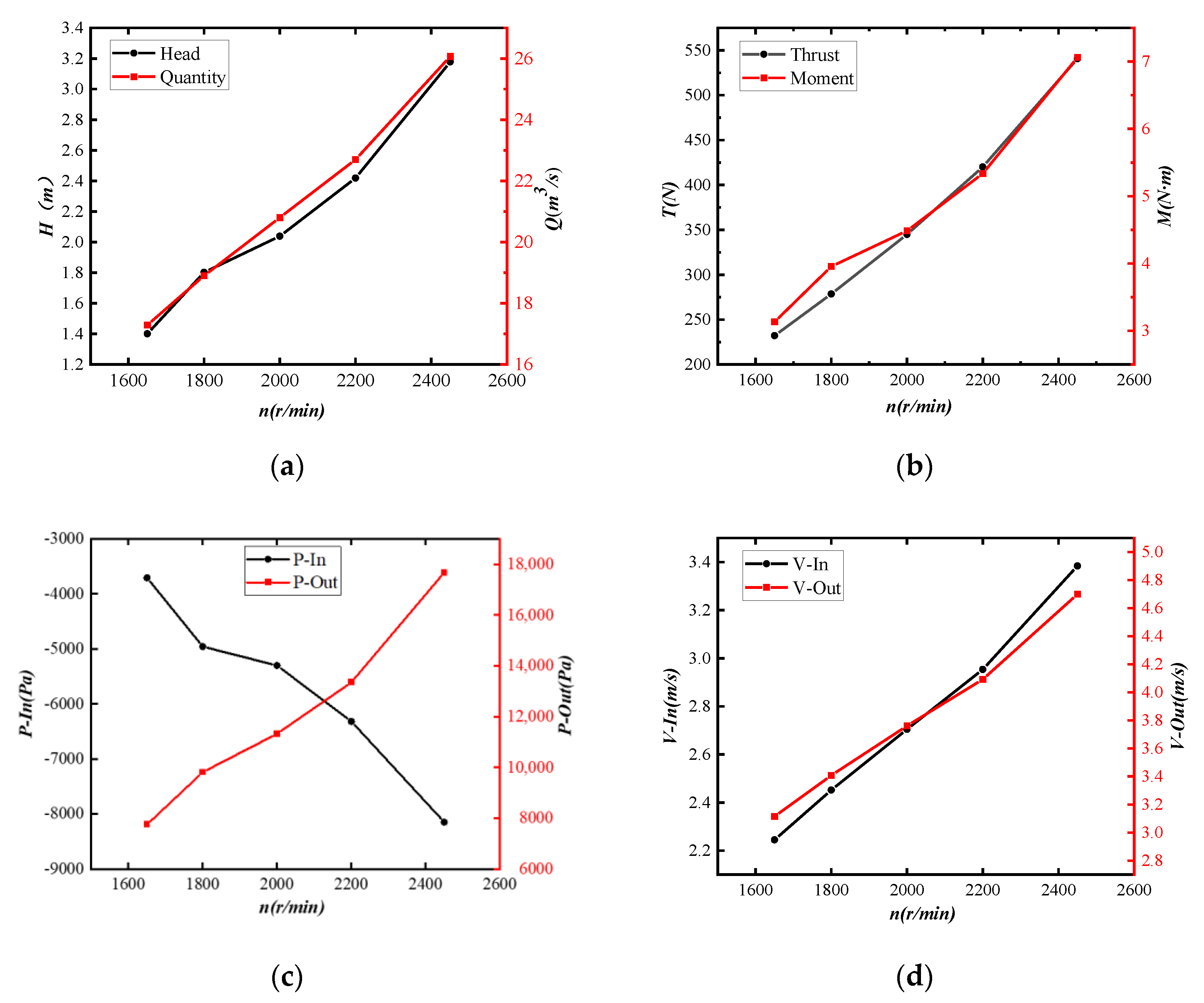
Figure 12a shows the ship-pump head and flow rate (Q-H) variation curve at different rotational speeds. The pump head shows parabolic growth as the rotational speed increases. This is due to the increase in system power as the rotational speed increases, resulting in the enhancement of the work carried out by the propeller vanes on the water flow and the reduction in the propeller energy loss. The types of growth of the system flow and head are different, and the system flow shows linear growth with the increase in the rotational speed, indicating that the water jet propeller holds commonality in different rotational speeds.
Figure 12b shows the ship-pump torque thrust (M-T) variation curve at different rotational speeds. The main reason for the variation in thrust is the change of fluid velocity in the inlet and outlet sections of the pump. The thrust force keeps growing as the rotational speed increases and has a positive correlation with the speed in the working condition range. The system torque also becomes larger as the speed increases, indicating that the shaft power also keeps increasing.
Figure 12c shows the pressure change curve at different rotational speeds. Both the impeller inlet pressure and guide vane outlet pressure increase continuously with increasing speed. However, the increase in pressure at the impeller outlet section (approximately 25 kPa) is much larger than that at the impeller inlet section (approximately 8 kPa). This is due to the increase in speed which leads to more power and more energy for the water flow, resulting in the rapid increase in the outlet pressure amplitude.
Figure 12d shows the import and export speed change curve at different rotational speeds. Both the import and export speed of the pump grow with the rotational speed, and the export speed changes more (approximately 3.7 m/s) than that of the import (approximately 1.7 m/s). The reason for this variation is the same as that for the pressure change.
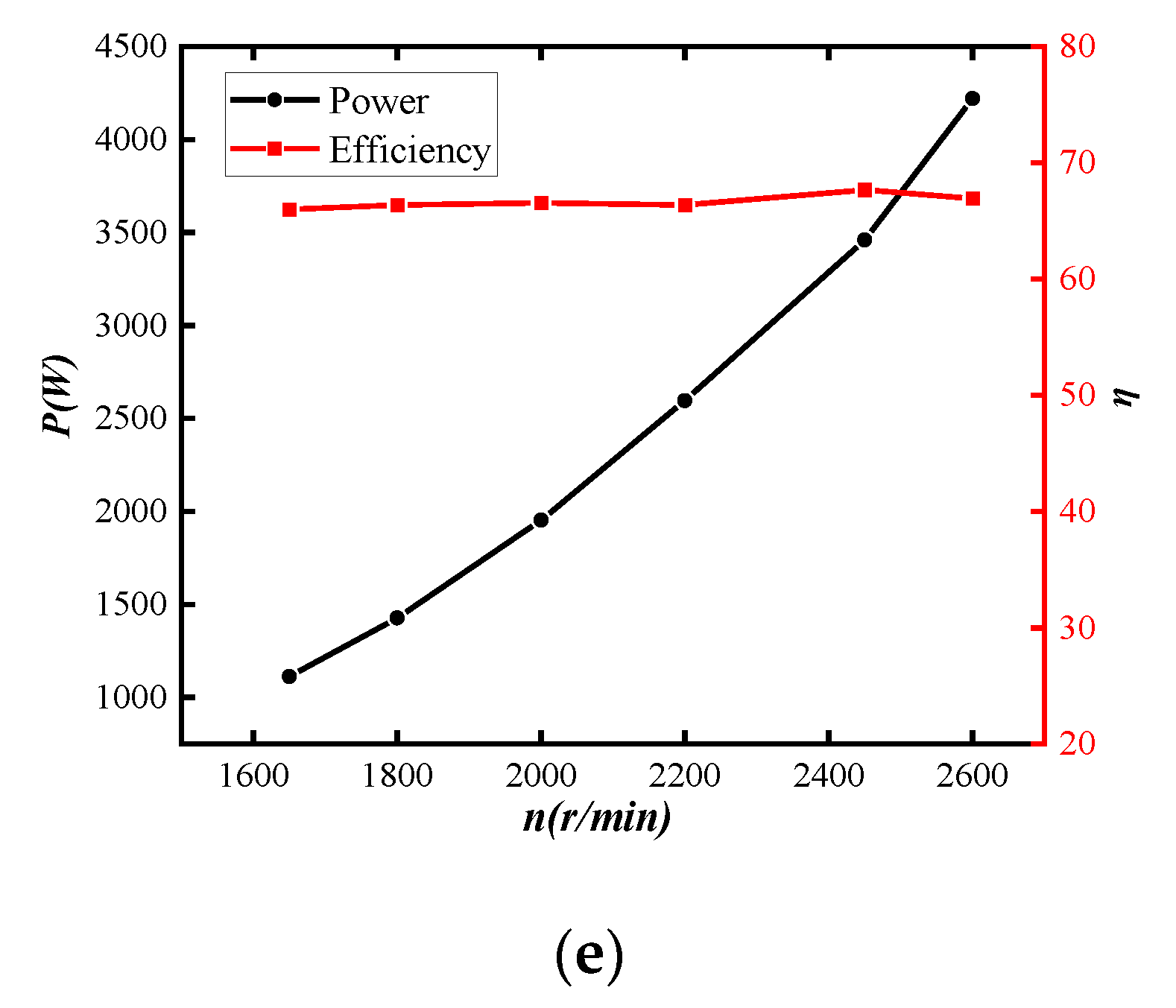
Figure 12e shows the power and efficiency (N-
η) curve at different rotational speeds. The propulsion system shaft power along with the increase in speed shows a parabolic rise. The propeller efficiency remains unchanged (approximately 66%), indicating that the quasi-steady-state calculation process ignores the role of the rotational acceleration of the propeller impeller, and the transformation of energy is similar at different rotational speeds.
5.2. Hydrodynamic and Flow Field Characteristic Analysis of a Two-Pump Water Jet Propulsion Ship under Mooring Conditions
Under mooring conditions, the hydrodynamic characteristics of the water jet propulsion system at variable speeds were solved using non-constant numerical calculations. Similar patterns existed in the numerical predictions (
Section 5.1), but there were also some differences, mainly in terms of the amplitude and curve jitter. Under mooring conditions, the rotating speeds of water jet propulsion ships are set at 1650, 1800, 2000, 2200 and 2450 r/min. The three working conditions, 1650, 2000, and 2450, were selected for flow field analysis.
Figure 13a shows the ship-pump head and flow rate curves at different rotational speeds. The pump head growth is parabolic with an increase in the rotational speed; as the speed increases, the system power increases, the work of the propeller blades on the water flow is enhanced, and the propeller energy loss is reduced. The head growth type is different and the system flow rate along with the increase in speed show linear growth, indicating that the water jet propeller at different speed holds a certain commonality.
Figure 13b shows the ship-pump torque thrust curves at different rotational speeds due to the energy difference between the pump inlet and outlet cross-sections of the fluid generating the system thrust. In this figure, the thrust force increases with the increase in the rotational speed, and its variation pattern is similar to the flow rate, which is positively correlated with the rotational speed in the working condition range. The system torque becomes larger as the rotational speed increases, indicating that the shaft power also increases.
Figure 13c shows the pressure variation curves of the inlet and outlet sections of the ship-pump propeller. Both the impeller inlet pressure and the guide vane outlet pressure increase continuously with the increase in the rotational speed, but the increase in the pressure in the impeller outlet section (approximately 10 kPa) is much larger than that in the impeller inlet section (approximately 5 kPa). This is because the power becomes larger as the rotational speed increases and the water flow also receives more energy. Therefore, the outlet pressure amplitude rises more rapidly. Comparing this curve to the one in
Section 5.1, the magnitude of change is reduced, mainly due to the flow loss problem when the flow path and the hull bottom plate are matched.
Figure 13d shows the average velocity variation curves of the ship-pump variable speed propeller inlet and outlet sections. The velocities of both the inlet and outlet of the pump increase with the increase in the rotational speed, and the change of the outlet velocity (approximately 2.4 m/s) is larger than that of the inlet (approximately 1.2 m/s).
Figure 13e shows the N-
η law of shaft power and propeller efficiency of the ship-pump system. The shaft power of the propulsion system shows a parabolic rise along with the increase in speed. However, the propeller efficiency remains the same (approximately 45%), indicating that the numerical prediction process ignores the role of the rotational acceleration of the propeller impeller. The conversion of energy is similar under different speed conditions. Meanwhile, the efficiency decreases under the open-water conditions in
Section 5.1. Conversely, the efficiency is not high under the mooring condition; the flow loss when matching the propeller and the hull leads to a decrease in the propeller efficiency.
Figure 13f shows the ship-pump nozzle velocity curves for different rotational speeds. The nozzle velocity increases as the speed increases and is greater than the velocity at the exit of the guide vane cross-section. This is because the nozzle structure is similar to the compression pipe to maintain energy conservation, which makes the cross-sectional area smaller, and increases the average velocity of the cross-section.
The hydrodynamic characteristics analyzed in this subsection are compared with the results of the numerical prediction of the single pump in open water carried out in
Section 5.1. Here, the water jet propellers are matched to the hull with the loss of runners, which affects the overall hydrodynamic performance of the ship. Therefore, the hydrodynamic performance parameters of the propellers matched on the ship model are reduced. This effect is evident under mooring conditions.
Figure 14 shows the comparison of the axial velocity distributions in the inlet channel of the propeller at different rotational speeds. The axial velocity of the inlet channel does not vary considerably with the rotational speed. However, from the general trend, there is a similar phenomenon as that of the axial velocity distribution in the mid-longitudinal section of the single pump in the open-water environment under mooring conditions in
Section 5.1. The velocity in the area closer to the propulsion pump is larger. Moreover, the backflow phenomenon occurs in the lower edge of the flow channel, which is more significant in the water jet propulsion model in this section. The flow characteristics in the area below the propeller inlet are affected because the transition at the lip of the channel becomes less smooth when the channel is matched to the hull.
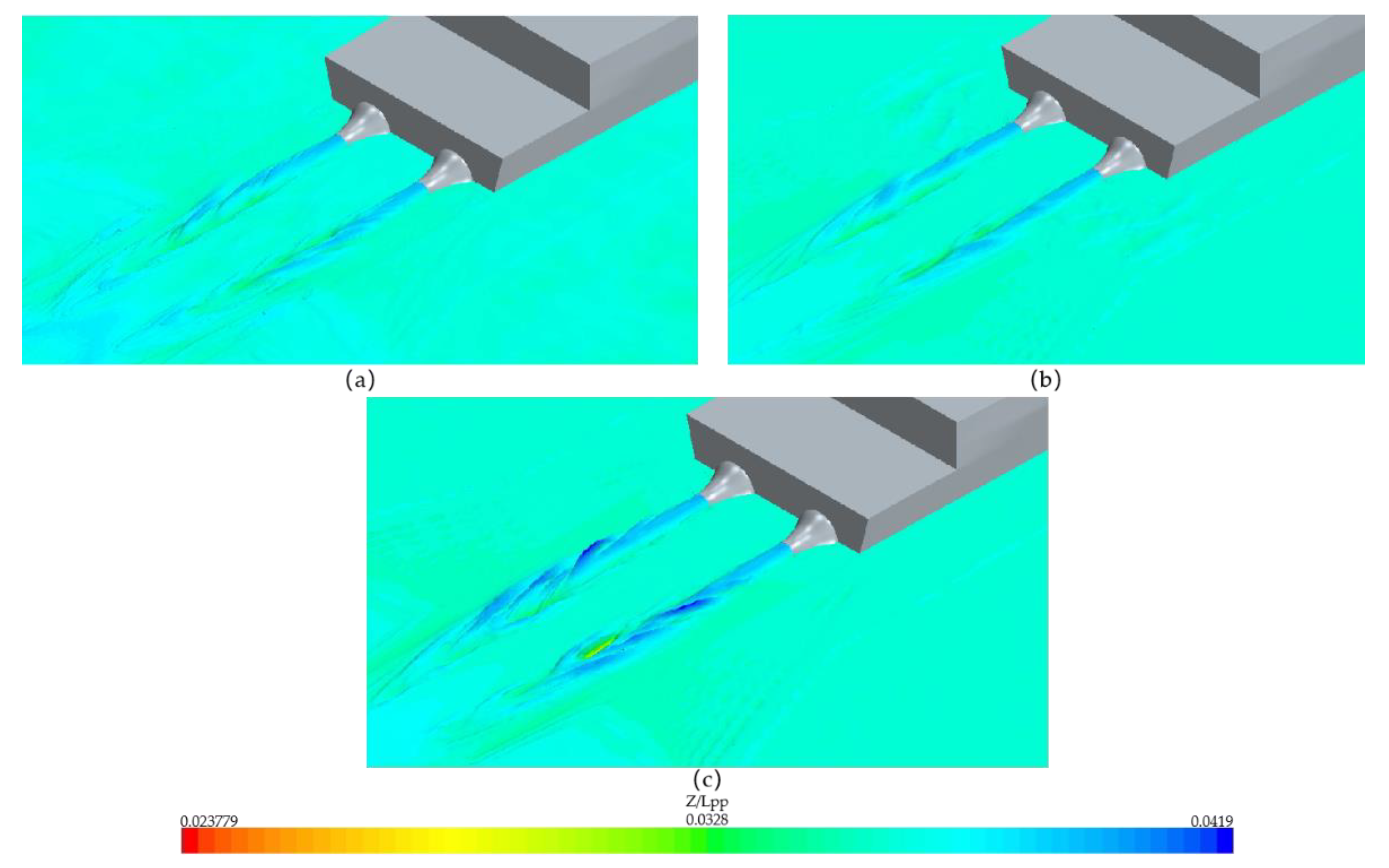
The disturbance phenomena of the nozzle jets of the variable rotational speed water jet propulsion ship model under mooring conditions are compared in
Figure 15. The results show that, at lower rotational speeds (
Figure 15a), a significant radial diffusion of the nozzle jet occurs in the closer region behind the ship model. The interactions between diffused and undiffused jets and between jets generated from different nozzles occur simultaneously. The starting positions of diffusion and disturbance start to move behind the stern plate as the rotational speed increases (
Figure 15b,c). At the same time, with the enhancement of the interference, the characteristics of the free surface at the stern of the ship model become more complex. As the impeller speed increases, the force generated by the system increases accordingly, resulting in an increase in the flow rate through the flow channel and the nozzle jet head and energy, which causes the jet diffusion region to move backwards.
The turbulent kinetic energy distribution in the inlet disc surface (x/LPP = 0.0116) and the longitudinal section in the flow channel (y/LPP = 0.038) of the propeller were selected for the analysis of the flow field characteristics in the water jet propulsion ship.
In
Figure 16, as the backflow phenomenon and propulsion shaft shading occur during mooring conditions, the high-speed position of the inlet disk is mainly in the upper disk, whereas the low-speed position is in the lower disk. Under mooring conditions, the unevenness of the axial velocity of the inlet disk surface of the propeller is significant. Simultaneously, the velocity variation of the inlet disk surface is distributed in the circumferential direction and the pump impeller area has a corresponding relationship.
Figure 17 presents the comparative analysis of the turbulent kinetic energy in the longitudinal section of the water jet propulsion system at different rotational speeds. The pipe contraction caused the turbulent kinetic energy to rise. Meanwhile, the axial velocity of the jet is still the main factor that influences energy. The pump area rotates the impeller to work on the fluid, and the flow field diameter and circumferential direction velocity components in the system change dramatically. The flow characteristics evolve while the turbulence is enhanced and the fluid flow is directed by the guide vane. The flow channel area is influenced by the inlet flow channel morphology, suction effect, and backflow effect under mooring conditions, and its flow form is dominated by the axial component while evolving along the fluid motion direction. The turbulent kinetic energy evolution of the flow field in the propeller is distributed in the regional flow separation locations.
In the numerical simulation, two monitoring points were set downstream on the inner object surface of the water jet propeller nozzle as P1 and P2, which are at an angle of 42° to the vertical surface (
Figure 18). Two monitoring points were used to monitor the pulsating pressure upstream and downstream of the nozzle, calculating the flow rate at the nozzle using the differential pressure method.
The flow rate
Q is expressed as
where
A1 and
A2 are the overflow areas of the upper and lower sections of the propulsion pump nozzle, respectively,
ρ is the fluid density, and
P1 and
P2 are the average pressure values of the flow field monitoring points at the upper and lower sections, respectively.
Table 10 lists the average values of the time domain pulsation pressure obtained from the numerical prediction at different rotational speeds during the mooring condition. In addition, in this table, the flow rate through the water jet propeller at different rotational speeds calculated using Equation (8) is included. The flow rate plotted from the table is converted to mass flow rate, and the flow rate variation line graph is plotted (
Figure 15a).
The results of the time domain pulsation pressure on the two measurement points at different speeds (i.e., 1650, 2000 and 2450 r/min) in the time domain are compared in
Figure 19. As the rotational speed increases, the time domain pulsation pressure increases in the numerical prediction, while the time domain pulsation pressure curve at the measurement point
P1 is always above the measurement point
P2.
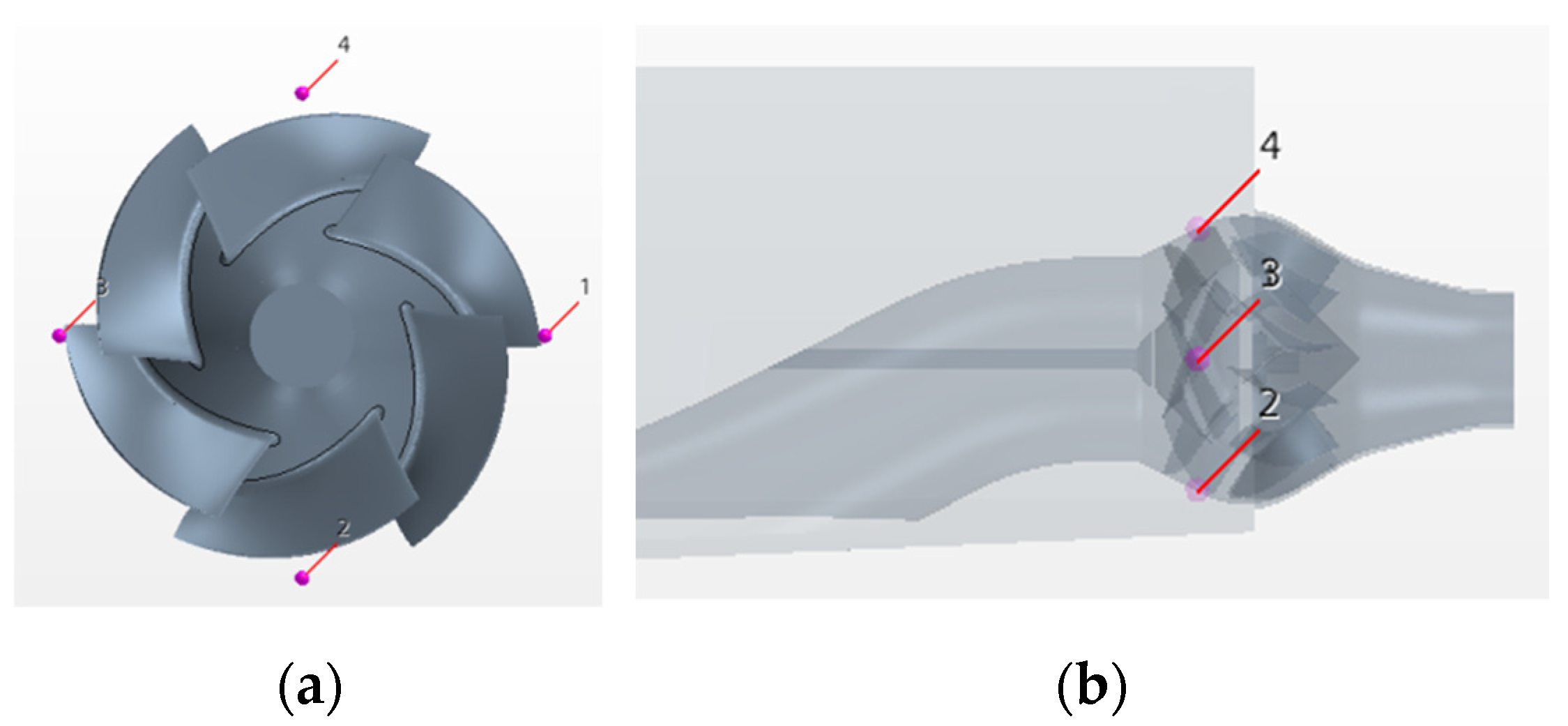
Monitoring points were set in the middle of the pump impeller and inlet channel model to monitor the pulsating pressure of the movement process. One monitoring point was set every 90° on the periphery of the impeller, numbered 1, 2, 3, and 4 in
Figure 20.
Figure 21 shows the Fourier-transformed frequency domain pulsation pressure plots for the four monitoring points (1–4) at different rotational speeds under mooring conditions. Based on the figure, the first-order pulsation force amplitudes of monitoring points 2 and 4 are higher at the lower speed, as shown in
Figure 20a. With an increase in the rotational speed, the first-order pulsation force amplitude at monitoring point 1 increases the most among the four points, while the change in pulsation force amplitude at monitoring point 3 is relatively less significant. Meanwhile, the pulsation force amplitude at monitoring point 3 does not change as significantly due to the flow channel loss that exists when the inlet channel and the hull are matched, which in turn leads to flow loss. Simultaneously, under mooring conditions, the backflow phenomenon also occurs at the lip of the flow channel, and the complex interaction between these two influences the pulsation pressure variation in the frequency domain at monitoring points 1 and 3. Generally, the higher the propulsion pump flow field inhomogeneity, the higher the frequency spectrum lobe frequency wave peak. As in the case of conventional propellers, the higher-order pulsation pressure amplitudes are all lower than that of the first-order one.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}