
Optimal Matching of Flapping Hydrofoil Propulsion Performance Considering Interaction Effects of Motion Parameters

Abstract
:1. Introduction
2. Materials and Methods
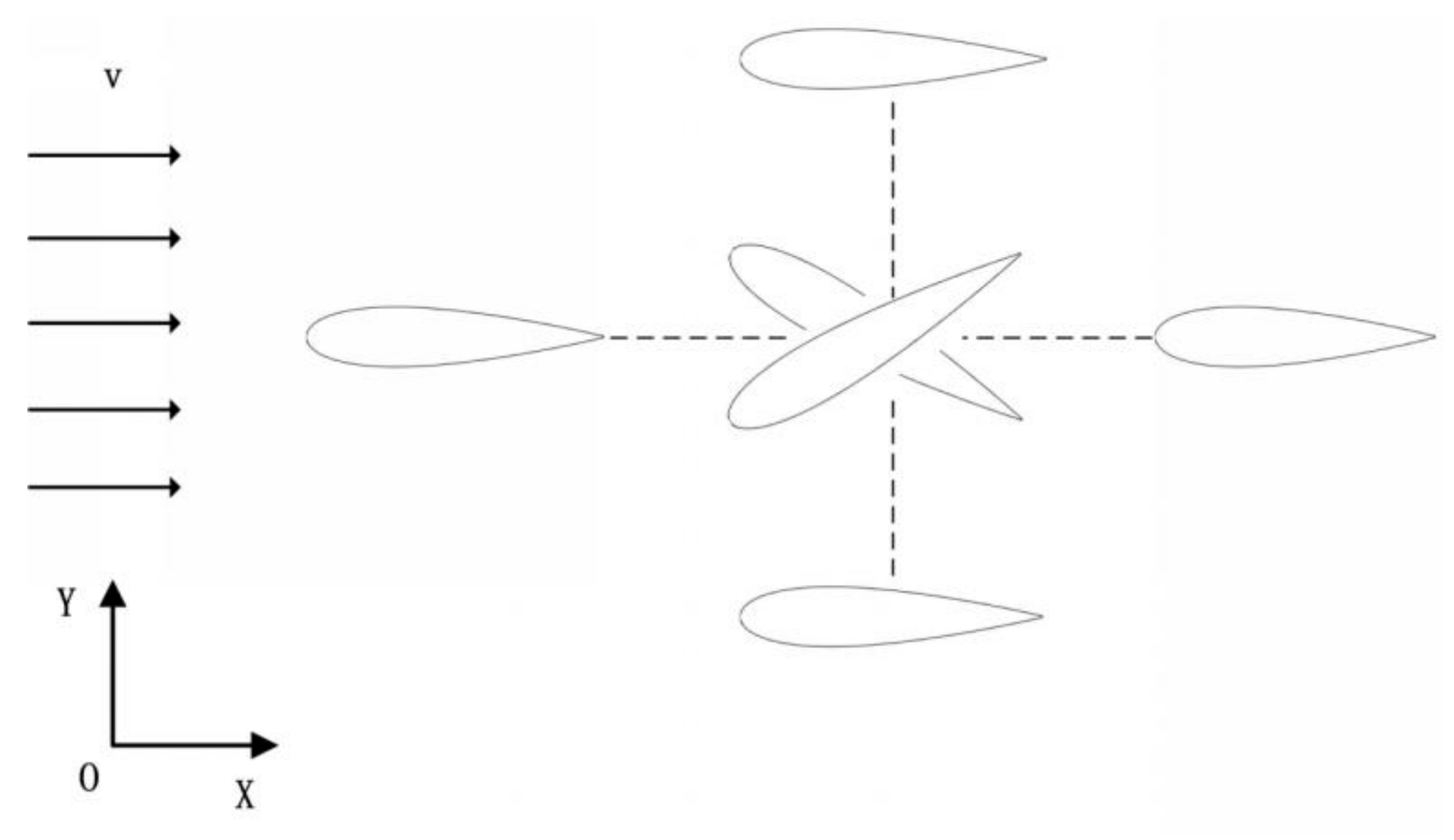
2.1. Motion Trajectory
2.2. Governing Equation and Parameter Definition
2.3. Mesh and Boundary Conditions
2.4. Numerical Verification
3. Results
3.1. Influence of Heave Motion Amplitude on Propulsion Performance
3.2. Effect of Maximum Pitch Angle on Propulsion Performance
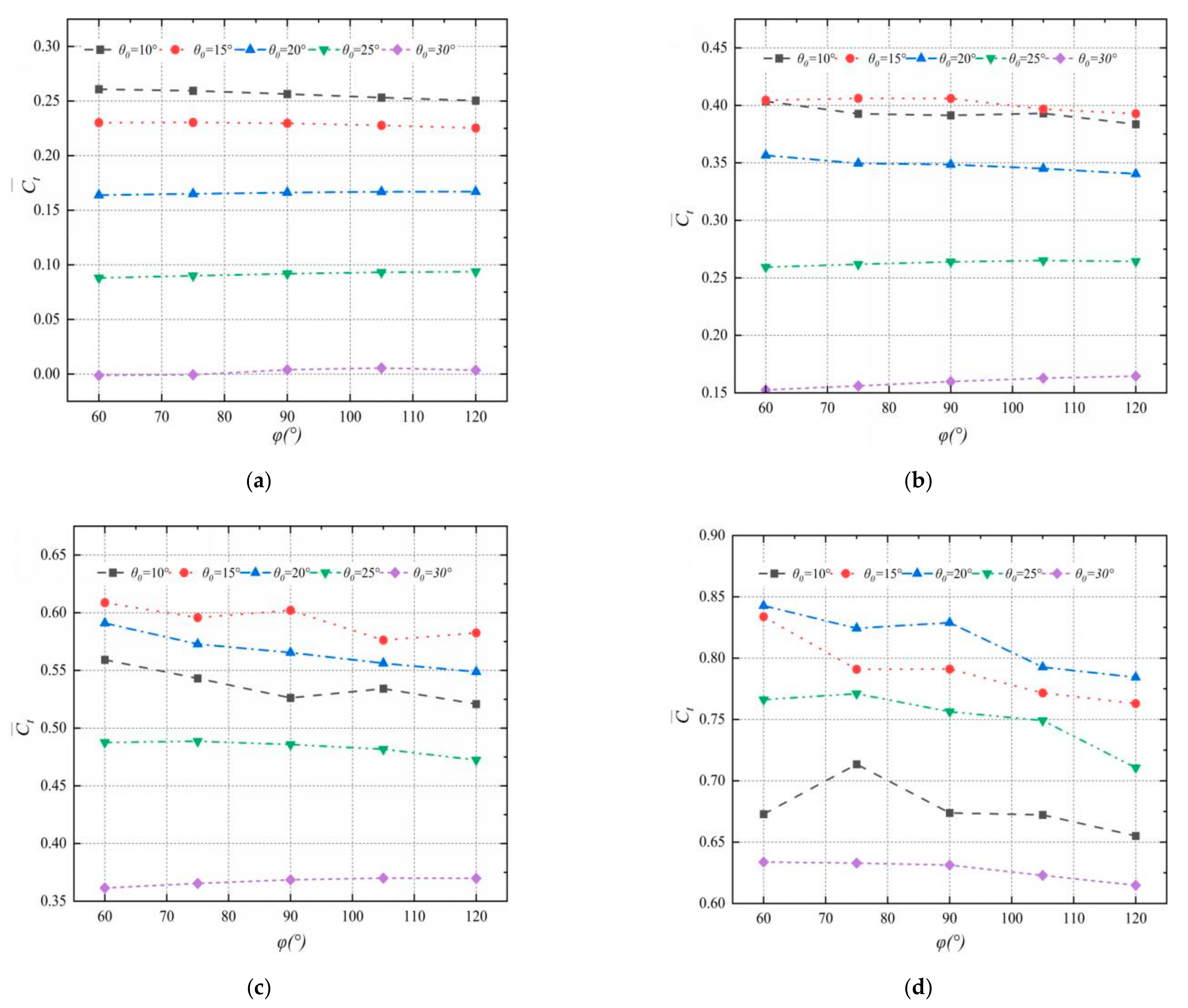
3.3. Influence of Heave Motion and Surge Motion Phase Difference on Propulsion Performance
3.4. Optimal Matching Results
4. Discussion
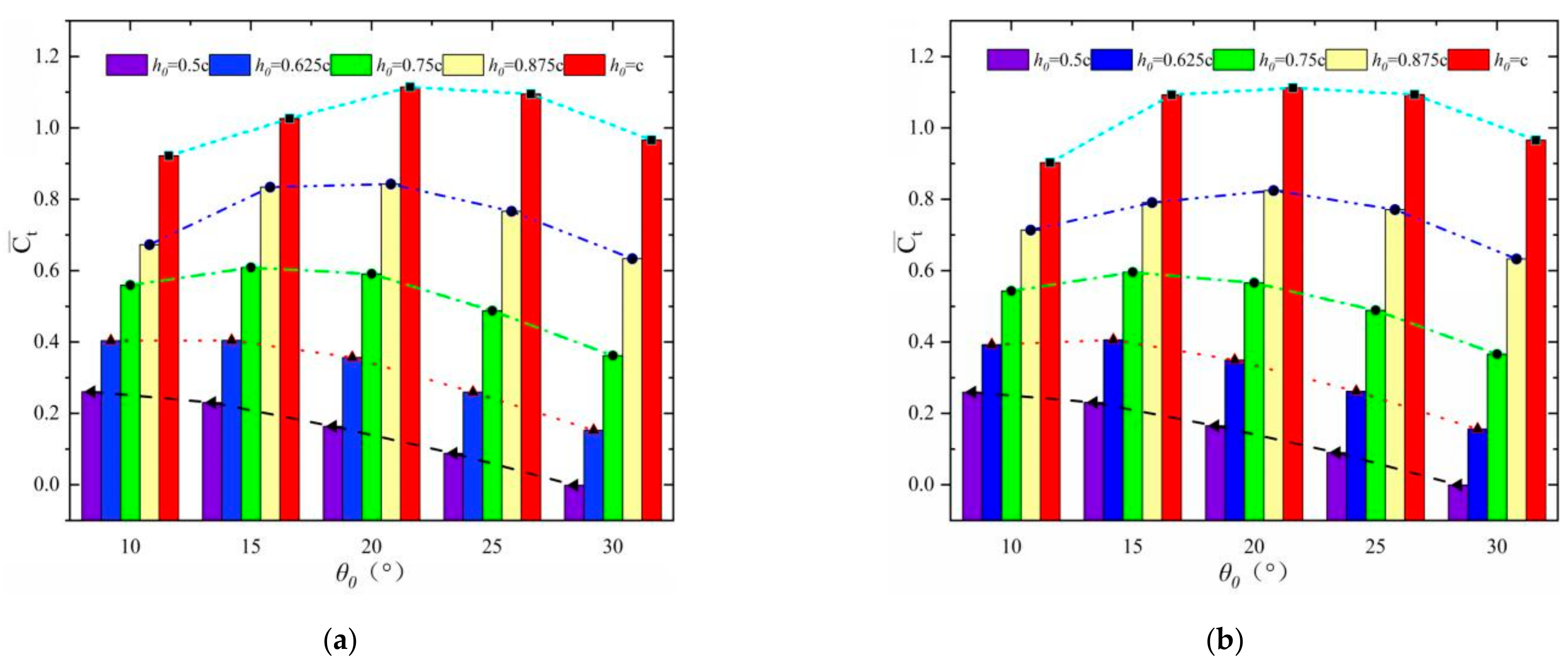
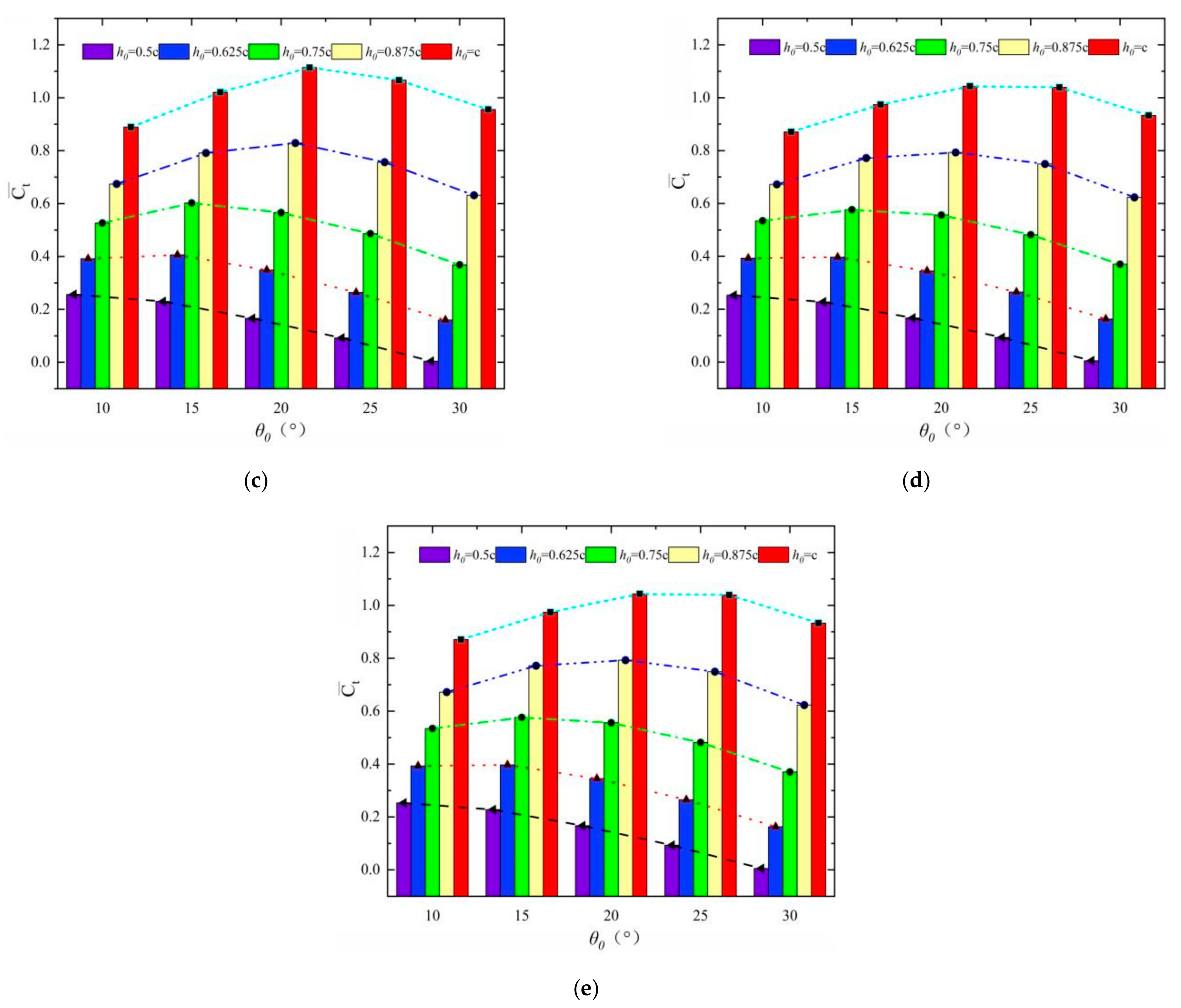
- The heave amplitude is positively correlated with the thrust coefficient. In addition, h0, θ0 and φ have interactive effects on the thrust coefficient of flapping hydrofoil, when the heave amplitude is at a higher level, the pitch amplitude, surge and heave phase difference have a greater impact on the thrust coefficient, and the interaction effect is more obvious.
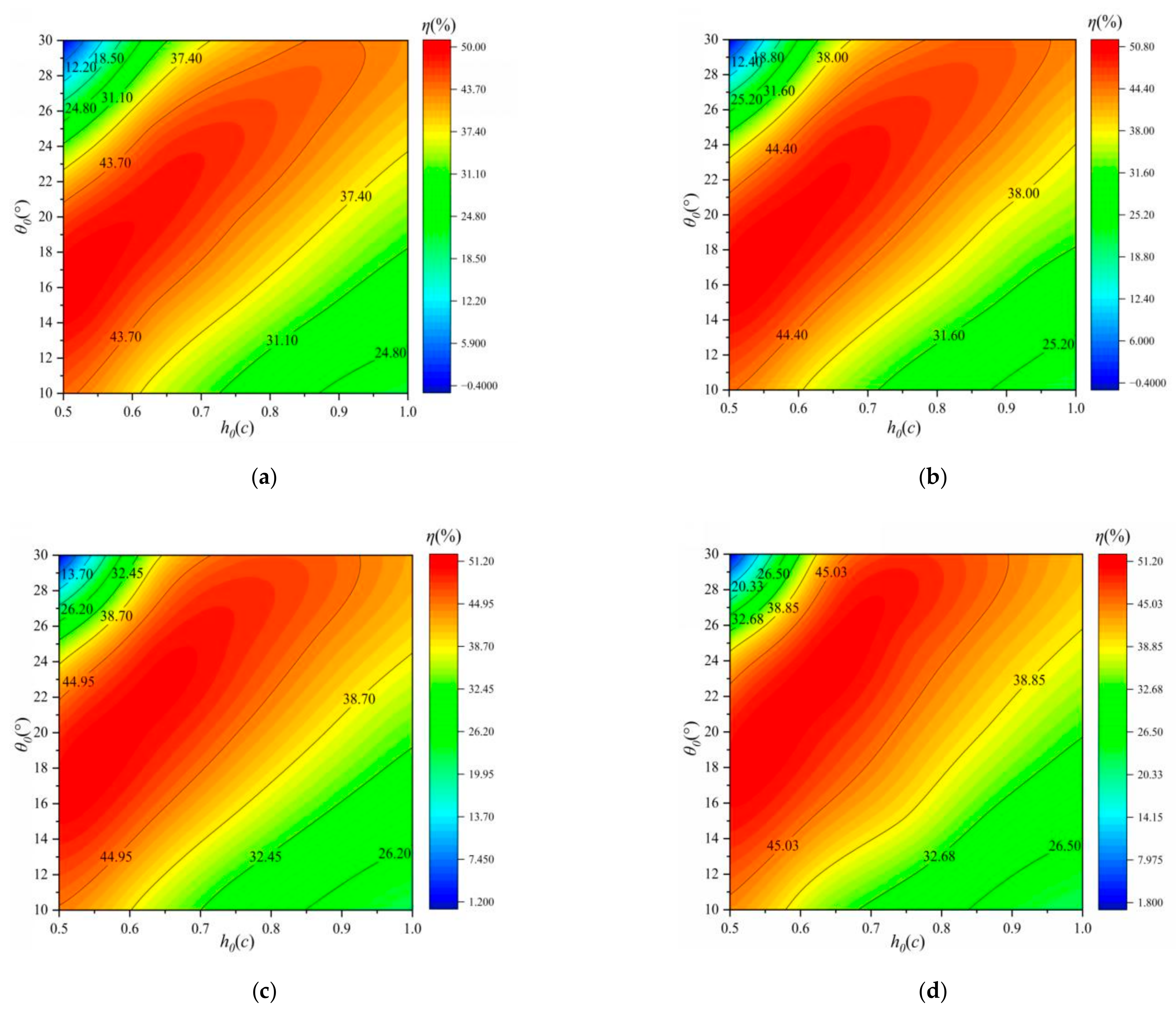
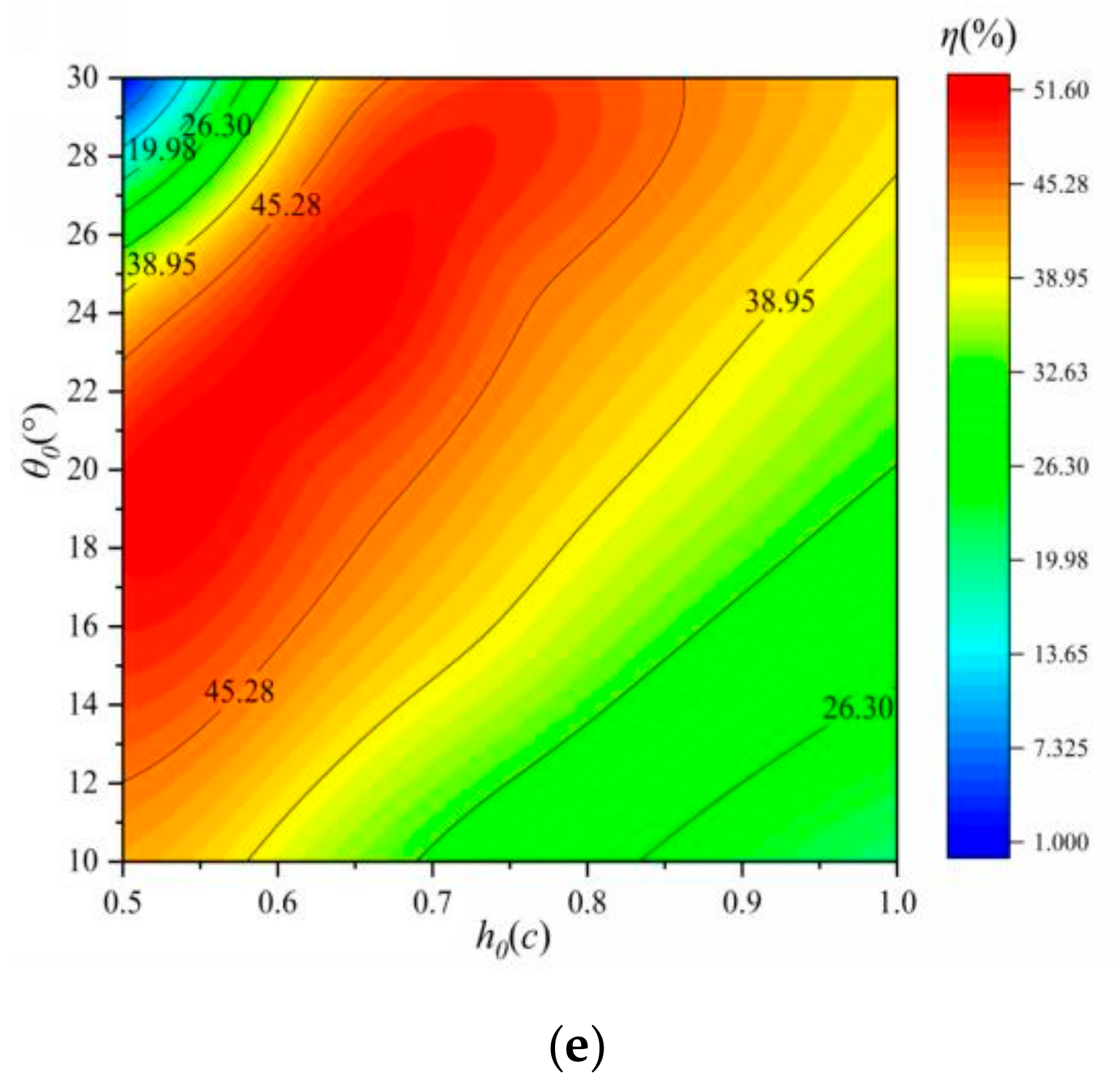
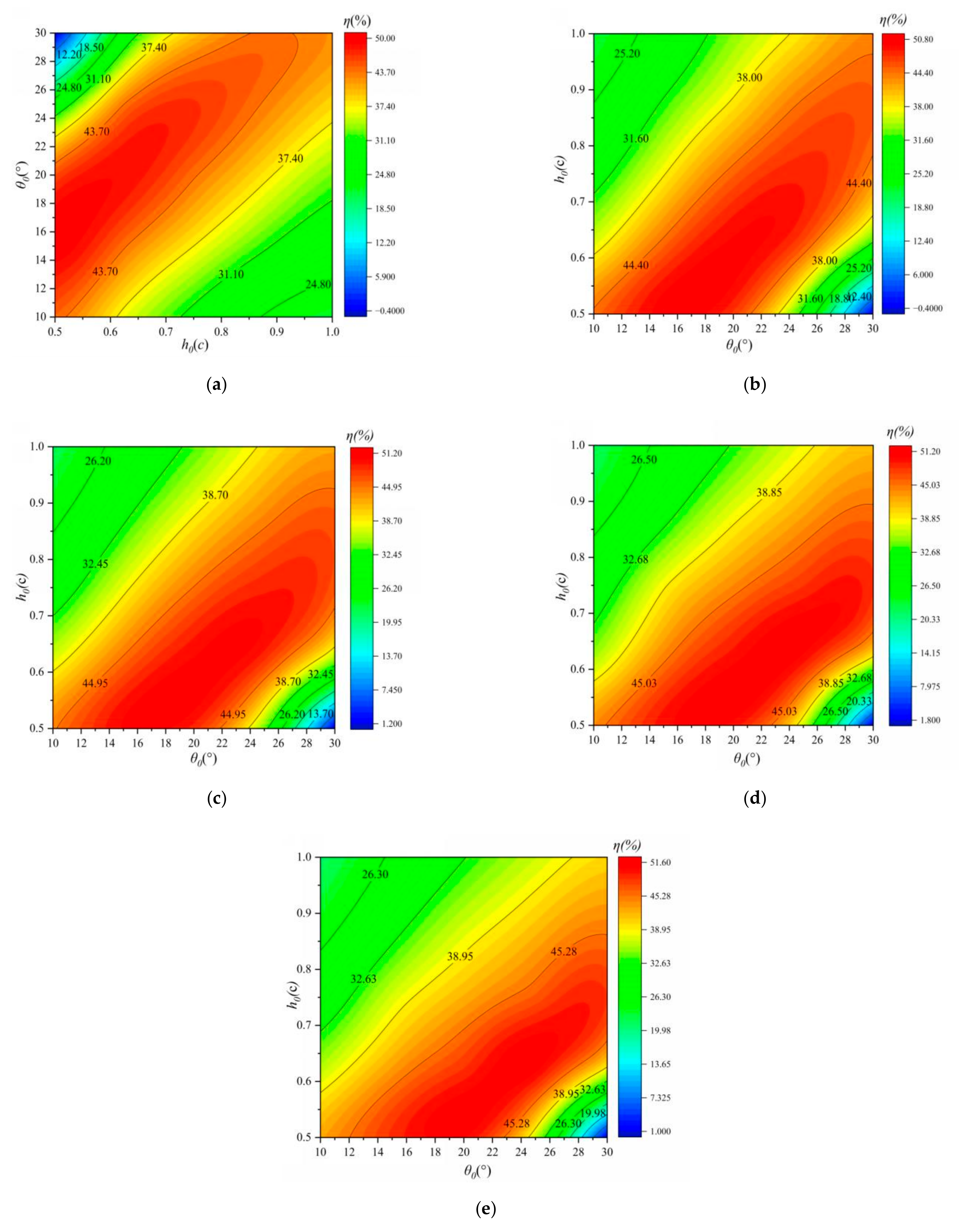
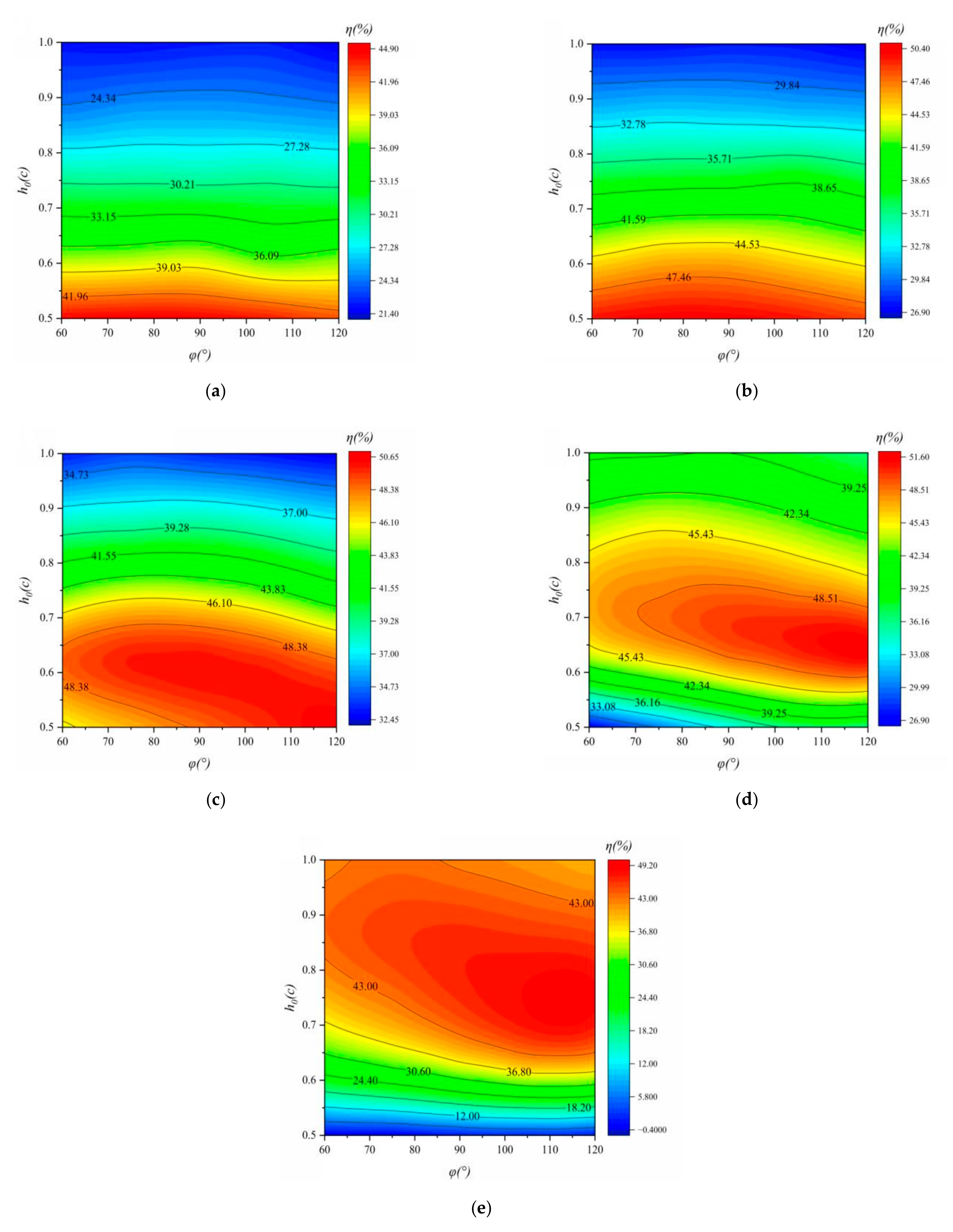
- The difference between surge and heave had a greater impact on the high propulsive efficiency area, and the change in efficiency contour was more obvious than that of the low-efficiency area.
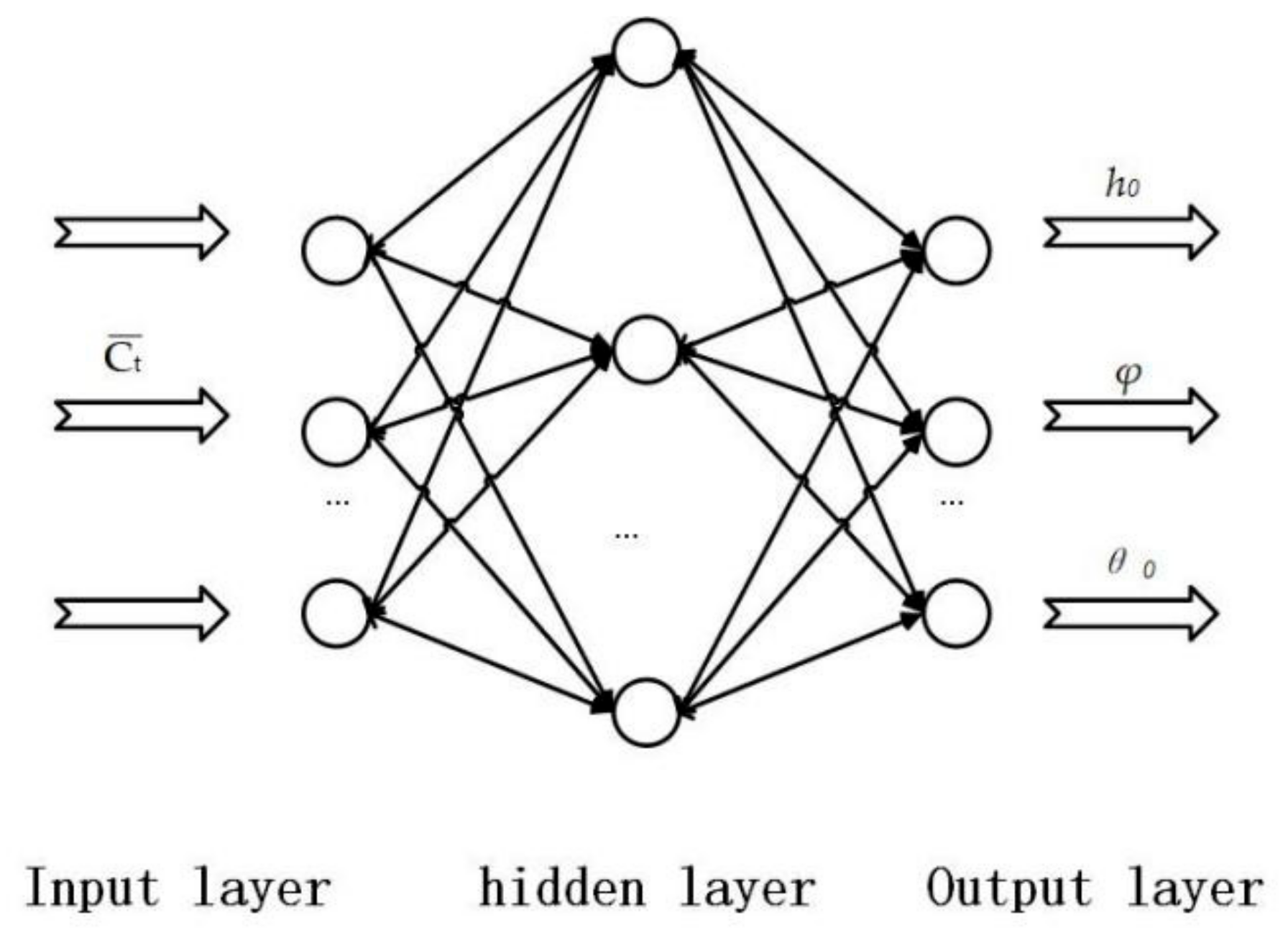
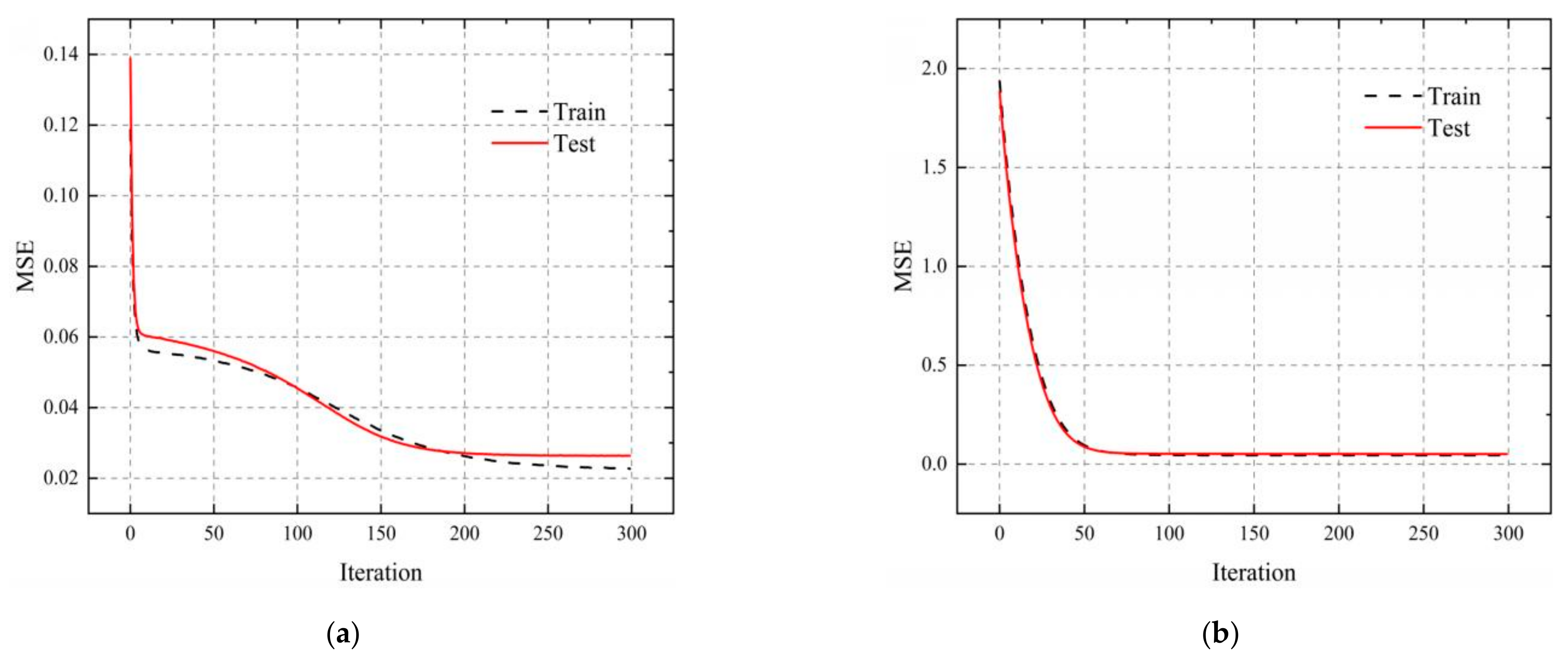
- Based on elliptical motion trajectory, the BP neural network was used to establish the fitting function of motion parameters and propulsion performance, and the motion parameter combination with the highest propulsion efficiency under certain thrust was obtained. When Kt = 0.2504, the propulsion efficiency could be improved by 7.73%.
- A new method to improve the propulsion performance of flapping hydrofoil is presented. By establishing the fitting function between the motion parameters and the propulsion performance, the optimal trajectory under certain thrust can be quickly found within the set motion parameters. This method can improve the propulsion performance of flapping hydrofoil and predict the optimal trajectory parameters under certain thrust.
- In this study, the propulsion performance of flapping hydrofoils is optimized based on elliptic trajectories, which can be applied to other trajectories in the future. The optimal motion models obtained under different motion trajectories are compared, and the flapping motion model with better propulsion performance can be obtained.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| x(t) | Transient horizontal displacement |
| h(t) | Transient vertical displacement |
| θ(t) | Transient rotation angle |
| x0 | Horizontal amplitude |
| h0 | Vertical amplitude |
| θ0 | Pitch amplitude |
| ω(ω = 2πf) | Circular frequency |
| t | Time |
| ϕ | Pitch and heave phase difference |
| φ | Surge and heave phase difference |
| Ct | Thrust coefficient |
| Cl | Lift coefficient |
| Cm | Moment coefficient |
| Fx(t) | Force in the horizontal direction |
| Fy(t) | Force in the vertical direction |
| M(t) | Pitching moment |
| ρ | Density of water |
| V | Flow speed |
| C | Hydrofoil chord length |
| CP | Input power coefficient |
| T | Period time |
| Average thrust coefficient over a period | |
| Average input efficiency over a period |
References
- Yamaguchi, H.; Bose, N. Oscillating foils for marine propulsion. In Proceedings of the Fourth International Offshore and Polar Engineering Conference (One Petro), Osaka, Japan, 10–15 April 1994. [Google Scholar]
- Ma, P.; Liu, G.; Wang, Y.; Zhang, Y.; Xie, Y. Numerical study on the hydrodynamic performance of a semi-passive oscillating hydrofoil. Ocean Eng. 2021, 223, 108649. [Google Scholar] [CrossRef]
- Zhou, D.; Cao, Y.; Sun, X. Numerical study on energy-extraction performance of a flapping hydrofoil with a trailing-edge flap. Ocean Eng. 2021, 224, 108756. [Google Scholar] [CrossRef]
- Triantafyllou, M.S.; Techet, A.H.; Hover, F.S. Review of Experimental Work in Biomimetic Foils. IEEE J. Ocean. Eng. 2004, 29, 585–594. [Google Scholar] [CrossRef] [Green Version]
- Techet, A.H. Propulsive performance of biologically inspired flapping foils at high Reynolds numbers. J. Exp. Biol. 2008, 211, 274–279. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ashraf, M.A.; Young, J.; Lai, J.C.S. Reynolds number, thickness and camber effects on flapping airfoil propulsion. J. Fluids Struct. 2011, 27, 145–160. [Google Scholar] [CrossRef]
- Read, D.A.; Hover, F.S.; Triantafyllou, M.S. Forces on oscillating foils for propulsion and maneuvering. J. Fluids Struct. 2003, 17, 163–183. [Google Scholar] [CrossRef]
- Hover, F.S.; Haugsdal, Ø.; Triantafyllou, M.S. Effect of angle of attack profiles in flapping foil propulsion. J. Fluids Struct. 2004, 19, 37–47. [Google Scholar] [CrossRef] [Green Version]
- Triantafyllou, G.S.; Triantafyllou, M.S.; Grosenbaugh, M.A. Optimal Thrust Development in Oscillating Foils with Application to Fish Propulsion. J. Fluids Struct. 1993, 7, 205–224. [Google Scholar] [CrossRef]
- Yu, D.; Sun, X.; Bian, X.; Huang, D.; Zheng, Z. Numerical study of the effect of motion parameters on propulsive efficiency for an oscillating airfoil. J. Fluids Struct. 2017, 68, 245–263. [Google Scholar] [CrossRef]
- Esfahani, J.A.; Barati, E.; Karbasian, H.R. Fluid structures of flapping airfoil with elliptical motion trajectory. Comput. Fluids 2015, 108, 142–155. [Google Scholar] [CrossRef]
- Chen, X.; Huang, Q.; Pan, G.; Li, F. Numerical Investigation of Elliptical Motion on Propulsion Performance of a Flapping Hydrofoil. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Ocean (OTO), Kobe, Japan, 28–31 May 2018. [Google Scholar]
- Yang, S.; Liu, C.; Wu, J. Effect of motion trajectory on the aerodynamic performance of a flapping airfoil. J. Fluids Struct. 2017, 75, 213–232. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, F.; Wang, D.; Jiang, X. Numerical investigation of a new three-degree-of-freedom motion trajectory on propulsion performance of flapping foils for UUVs. Ocean Eng. 2021, 224, 108763. [Google Scholar] [CrossRef]
- Yue, W. Optimal design for flapping airfoil motion parameters. J. Beijing Univ. Aeronaut. Astronaut. 2021, 1–15. [Google Scholar]
- Xingjian, L.; Jie, W.; Tongwei, Z. Self-organizing behavior during propulsion of flapping wing swarms. In Proceedings of the 11th National Academic Conference on Fluid Mechanics, Shenzhen, Guangdong, China, 3–7 December 2020; p. 700. [Google Scholar]
- Isogai, K.; Shinmoto, Y.; Watanabe, Y. Effects of dynamic stall on propulsive efficiency and thrust of flapping airfoil. Aiaa J. 1999, 37, 1145–1151. [Google Scholar] [CrossRef]
- Xianqi, Z.; Xiangcheng, S.; Xian, W. High-performance numerical study on the effect of angle of attack on the aerodynamic performance of flapping wing motion. Acta Aerodyn. 2021, 1–11. [Google Scholar]
- Young, J. Numerical Simulation of the Unsteady Aerodynamics of Flapping Airfoils. Ph.D. Thesis, University of New South Wales, Sydney, Australia, 2005. [Google Scholar]
- Anderson, J.M.; Streitlien, K.; Barrett, D.S.; Triantafyllou, M.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Q.; Zhu, Q. A review on flow energy harvesters based on flapping foils. J. Fluids Struct. 2014, 46, 174–191. [Google Scholar] [CrossRef]
- Hao, D. Research on propulsion characteristics and motion performance of bionic flapping-wing underwater vehicle. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an, China, 2015. [Google Scholar]
- Xiaobai, L. Research on flexible hydrofoil propulsion technology imitating sea turtle. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2012. [Google Scholar]
- Dehu, Q.; Jichang, K. Design of BP Neural Network. Comput. Eng. Des. 1998, 2, 47–49. [Google Scholar]
- Zhibo, Z. Based on BP artificial neural network and genetic algorithm Optimum Design of Ship Propellers. J. Ship Mech. 2010, 20–27. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ct | |
|---|---|
| Xiao Chen | 0.5662 |
| This time | 0.5642 |
| h0 (c) | 0.5 | 0.625 | 0.75 | 0.875 | 1 | |
|---|---|---|---|---|---|---|
| θ0 (°) | ||||||
| 10 | 0.00384 | 0.00639 | 0.01352 | 0.01931 | 0.04365 | |
| 15 | 0.00192 | 0.00546 | 0.01206 | 0.02444 | 0.05122 | |
| 20 | 0.00121 | 0.00532 | 0.01453 | 0.02231 | 0.03994 | |
| 25 | 0.00212 | 0.00207 | 0.00589 | 0.02139 | 0.03729 | |
| 30 | 0.00268 | 0.00438 | 0.00324 | 0.00727 | 0.02699 | |
| Traditional Motion | φ = 60° | φ = 75° | φ = 90° | φ = 105° | φ = 120° | |
|---|---|---|---|---|---|---|
| 0.2542 | 0.2608 | 0.2594 | 0.2565 | 0.2532 | 0.2505 | |
| Improvement | \ | 2.60% | 2.05% | 0.90% | −0.39% | −1.46% |
| 31.72% | 44.55% | 44.79% | 44.61% | 43.97% | 42.80% | |
| Improvement | \ | 12.83% | 13.07% | 12.89% | 12.25% | 11.08% |
| Initial Motion Parameters (h0 = 0.5c, θ0 = 10°, φ = 120°) | Predicted Motion Parameters (h0 = 0.5095c, θ0 = 22.476°, φ = 96°) | CFD Validation of Predicted Motion Parameters (h0 = 0.5095c, θ0 = 22.476°, φ = 96°) | |
|---|---|---|---|
| 0.2504 | 0.2504 | 0.2559 | |
| 42.80% | 50.28% | 50.53% | |
| Improvement | \ | \ | 7.73% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Chang, X.; Hou, L.; Gao, N.; Chen, W.; Tian, Y. Optimal Matching of Flapping Hydrofoil Propulsion Performance Considering Interaction Effects of Motion Parameters. J. Mar. Sci. Eng. 2022, 10, 853. https://doi.org/10.3390/jmse10070853
Wang Z, Chang X, Hou L, Gao N, Chen W, Tian Y. Optimal Matching of Flapping Hydrofoil Propulsion Performance Considering Interaction Effects of Motion Parameters. Journal of Marine Science and Engineering. 2022; 10(7):853. https://doi.org/10.3390/jmse10070853
Chicago/Turabian StyleWang, Zixuan, Xin Chang, Lixun Hou, Nan Gao, Weiguan Chen, and Yuanxin Tian. 2022. "Optimal Matching of Flapping Hydrofoil Propulsion Performance Considering Interaction Effects of Motion Parameters" Journal of Marine Science and Engineering 10, no. 7: 853. https://doi.org/10.3390/jmse10070853
APA StyleWang, Z., Chang, X., Hou, L., Gao, N., Chen, W., & Tian, Y. (2022). Optimal Matching of Flapping Hydrofoil Propulsion Performance Considering Interaction Effects of Motion Parameters. Journal of Marine Science and Engineering, 10(7), 853. https://doi.org/10.3390/jmse10070853