3.1. Definition of the Control Points
The principle physical mechanism governing the slide–water interaction and wave generation was the transfer of momentum, from the sliding mass to the body of water. The efficiency of the momentum transfer mainly depends on the interaction forces between the two phases, which include the hydrostastic force F and the drag force F. In addition, as the density of the slide material selected in the present study was close to that of water, the buoyancy force was, approximately, balanced with the gravity. In this case, once the slide material entered the water body, the friction between the material and the slope bottom would be neglected, as it was small. Moreover, the material would not reach the bottom of the water basin quickly. The effect of seabed pressure was, also, neglectable.
Both the hydrostastic force and the drag force depend on the motion and deformation of the submerged sliding mass. For the viscoplastic material–water interaction, the drag force
F can be simplified as:
where
is the coefficient of drag,
is the water density,
is the cross section area of the submerged sliding mass,
is the mean velocity of the submerged slide, and
is the mean velocity of the moving body of water. For the calculation of
F, Equation (
2) considered the sliding mass as a whole and simplified the slide’s velocity via its mean velocity. However, the deformation of the submerged sliding mass increases the complexity of the internal dynamics of the moving slide, which increases the difficulty of quantifying the drag force.
The hydrostastic force
F is a result of the change in hydrostatic pressure on the wetted surface of the sliding mass, as it enters the body of water. It can be expressed as an integration from:
where
g is the gravity acceleration,
is the distance between the water surface and the slide–water interface,
is a vector normal to the slide–water interface, and
is the area of the slide–water interface.
From Equations (
2) to (
3), we can see that the hydrostastic force
F and the drag force
F are dominated by the cross-section area of the sliding mass
, the distance between the water surface and the slide–water interface
, and the area of the slide–water interface
. All these parameters are related to the evolution of the slide–water interface and the moving trajectory of the sliding mass. It means that the submerged slide motion dominates the efficiency of the momentum transfer, from the slide material to the water body, and, accordingly, affects the characteristics of the associated waves.
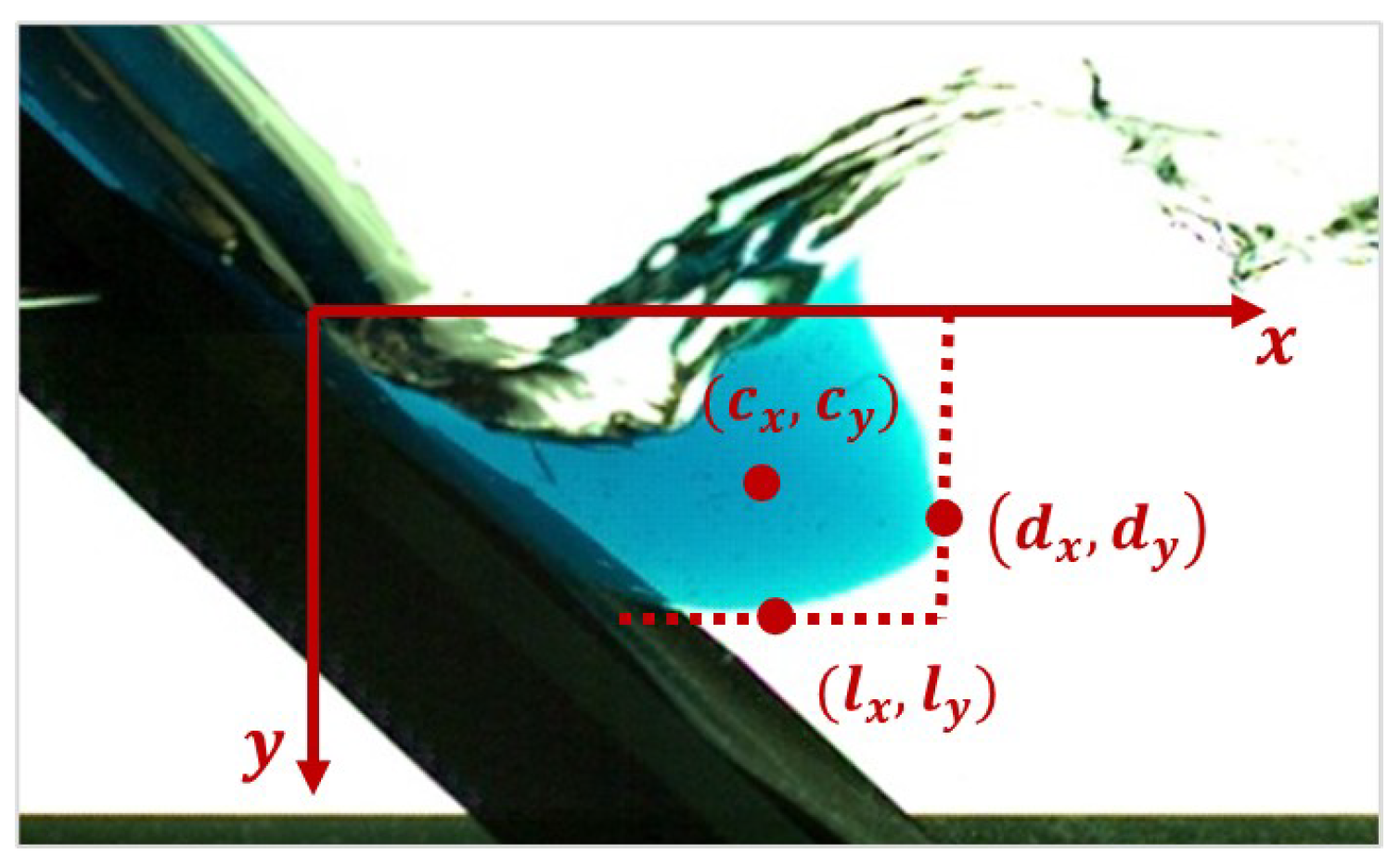
To simplify the submerged slide’s moving and deforming process, we analyzed the evolution of the slide–water interface in two aspects, including the submerged slide’s space-averaged motion and its overall spread. We selected three control points to represent the influencing parameters
,
, and
of the momentum transfer process, which have been mentioned above: the center of mass
, the frontal point (
), and the deepest point
.
Figure 5 illustrates the position of the selected control points. The deepest point of the submerged sliding mass
was defined as the lowest point from the free water surface, in a vertical direction. The frontal point (
) was the farmost point away from the shoreline, in a horizontal direction. The center of mass
was selected as an indicator of the space-averaged motion of the submerged sliding mass. The vertical coordinate of the deepest point
and the horizontal coordinate of the frontal point
were considered as the proxy of the overall motion of the submerged slide.
3.2. Motion of the Control Points
We, first, selected four representative experiments to examine the overall evolution of the center of mass of the submerged sliding mass. For each experiment, the slope angle
= 45
and the still-water depth
= 0.2 m. The features of the incoming slide material were controlled by varying the initial mass of the material in the container box
and the slope length
. See
Table 2 for the
and
of the selected four tests.
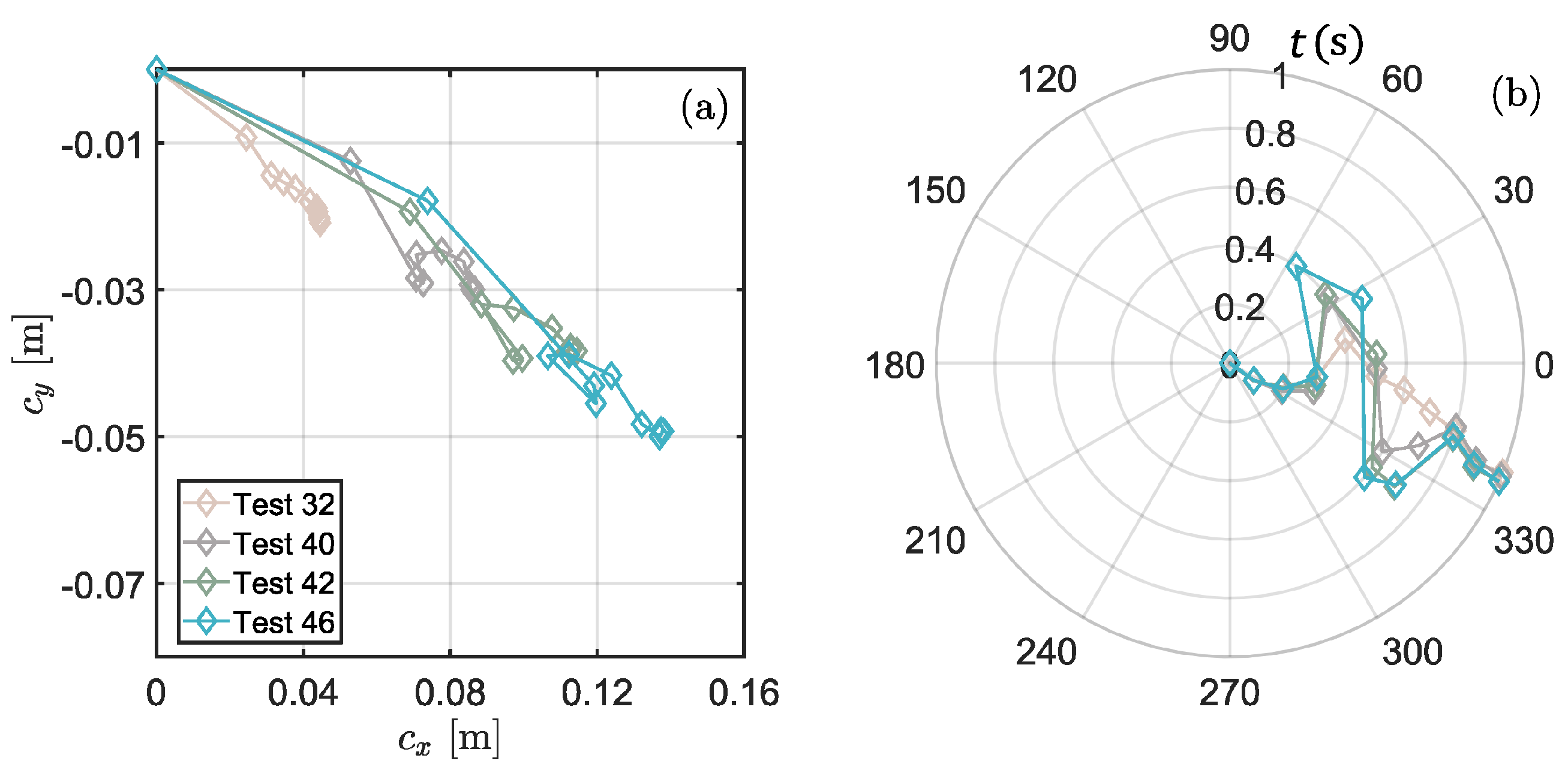
Figure 6a illustrates the time evolution of the coordinates of the center of mass (
), for the four selected experiments. It can be seen from the figure that the center of mass for all these four experiments, first, moved forward, after it crossed the shoreline, and, then, it turned back, due to the affect of the water pressure.
Figure 6b displays the mean velocity of the submerged slide
, which provides a perspicuous view of how the submerged slide’s moving direction was turned. For these four selected experiments, both the center of mass and the mean velocity have similar trends in evolution, which means the submerged slide with different initial parameters suffered a similar deforming process.
As shown in
Figure 5, the frontal point (
,
) was defined as representing the distance from the front of the sliding mass to the shoreline. The horizontal coordinate
could, fully, represent the distance between the front boundary and the shoreline, thus, we think analyzing the evolution of
was not necessary. Similarly, (
,
) was defined for describing the distance between the free water surface and the deepest point of the submerged sliding mass.
could, fully, represent this information, thus,
can be neglected in the following analysis. We, then, quantified the time evolution of the selected coordinates, i.e.,
,
,
, and
.
The selected coordinates of control points were scaled by the still-water depth
: the scaled horizontal coordinate of the center of mass
, the scaled vertical coordinate of the center of mass
, the scaled horizontal coordinate of the frontal point
, and the scaled vertical coordinate of the deepest point
. Time
t was scaled as
. We used the impulse parameter P, proposed by Heller and Hager (2010), to represent the characteristics of the incoming landslides, with an expression that can be written as [
7,
9]:
where Fr =
is the slide Froude number,
is the scaled slide thickness,
is the scaled slide mass,
is the slope angle,
is the velocity at impact,
s is the slide thickness,
is the water density,
is the effective slide mass, and
b is the flume width. By varying the slope length
and initial slide mass
, the scaled slide parameters ranged as follows: the slide Froude number is
, the scaled slide mass is
, the scaled slide thickness is
, and the impulse product parameter P is
.
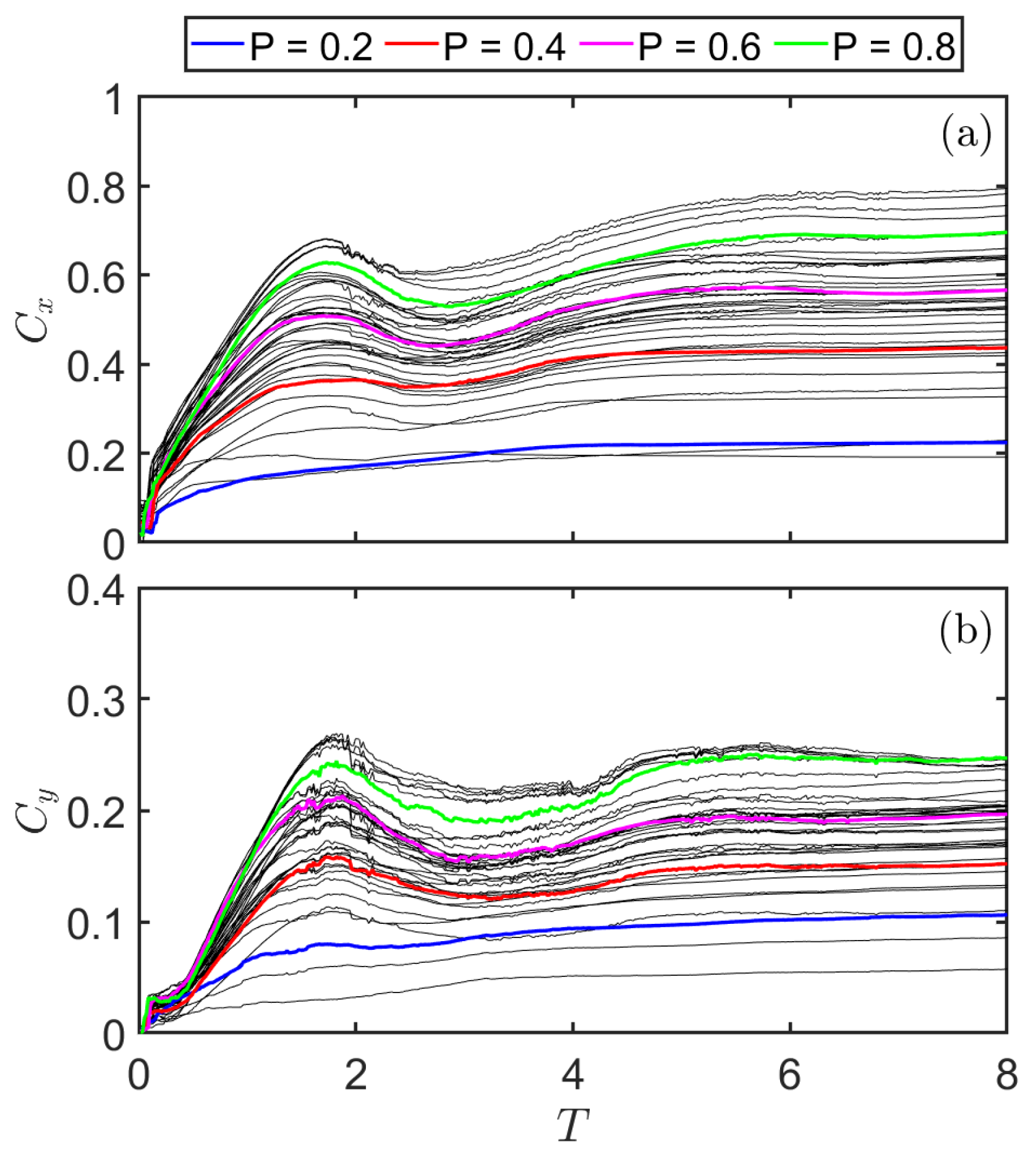
Figure 7 displays the time variation of the scaled coordinates of the center of mass
and
, for experiments with different impulse product parameter P. First, as the slope angle was fixed to 45
,
was equaled to
, for non-deformable slide materials. In our experiments,
was, generally, larger than
. It means that the slide deformed upward, after it entered the water body. For most experiments, both
and
increased sharply at
, and, then, had a slight fluctuation at
. They, then, increased with a declining rate of increase at
, and, finally, trended to be flattened at
. It means that the center of mass in most experiments moved upward and bent to the direction of shoreline at
. The submerged sliding mass started to stop, since
, and, finally, stopped after
. As the impulse product parameter P could, generally, reflect the features of the incoming landslide, we examined the effects of P on the evolution of
and
. In general,
ranged within 0.2 to 0.8, and
ranged between 0.05 and 0.25, for experiments with 0 < P < 1. Four experiments with P = 0.2, P = 0.4, P = 0.6, and P = 0.8 were emphasized in the figure. It can be seen that the impulse product parameter P greatly affects the moving trajectory of the center of mass. Experiments with larger P, usually, had larger values of
and
. In addition, the fluctuation of
and
, during
, was more significant for experiments with larger P, which means slides with a larger initial momentum received more water pressure and suffered a more significant deformation than slides with a lower initial momentum.
Figure 8a displays the time variation of the scaled horizontal coordinate of the frontal point
, for experiments with varying P. The
increased, with a declining rate of increase at
, and it trends to flatten at
. It ranged within
, during the whole process. In addition, similar to
and
, the general variation of
depended on P. Experiments with larger P led to larger values of
, on the whole.
Figure 8b indicates the time variation of the scaled vertical coordinate of the deepest point
, for experiments with varying P. Similar with other control points, the deepest point, also, had an obvious time node (i.e.,
T = 2), for all experiments, which divided the whole process into two phases, i.e.,
and
.
increased, quickly, with a declining rate of increase at
, and it trends to flatten at
. In addition,
increases with the increase in P, with a maximum value of 0.6 in our experiments.
On the whole, the evolution of the center of mass was dominated by two factors: one was the volume of the submerged slide, which had a linear relation with the effective slide mass
; another was the deformation of the submerged slide, which resulted in
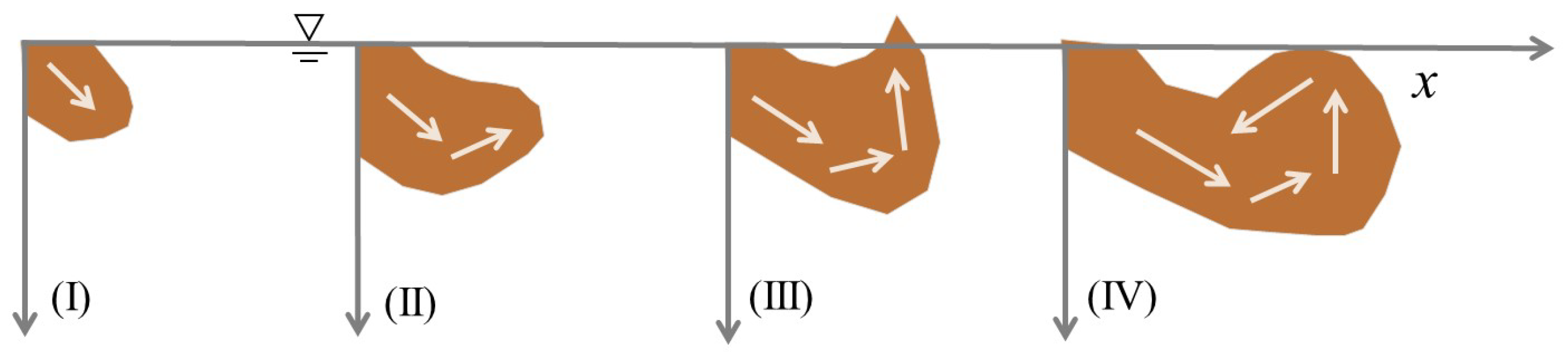
, during the impact. The evolution, of the frontal and deepest points, was related to the slide–water interface, which revealed the right and bottom boundaries of the submerged slide, respectively. Once it entered the water body, the slide moved along the slope at the very beginning, and the frontal part of the slide moved upward soon after, due to the buoyancy effect; then, it bent toward the shoreline, due to the resistance of water.
Figure 9 illustrated the sketch of how the slide was deformed, since it emerged into the water body, due to the buoyancy effect and drag force.
Even though quantifying the submerged slide’s moving trajectory, by three control points, may involve an over-simplification, it, still, provided several interesting findings. First, the slide deformation almost followed the same tendency, in all experiments. Even the time nodes, during the evolution of the scaled coordinates of the control points, were similar for all experiments. Two significant time nodes were observed: one was T∼1, and another was T∼2. Almost all the curves increased very quickly at the very beginning at , and increased with a decelerating trend at , before they began to flatten after . In addition, the slope angle was fixed to 45, while our results showed that was significantly smaller than , which demonstrated that the slide has a significant deformation upward, once it entered the water body. In addition, with the increase in P, the control points’s coordinates increased on the whole. The slide’s deformation was more obvious with larger P. High deformability may reduce the efficiency of momentum transfer, from the sliding mass to the body of water.
3.3. Quantitative Analysis
The evolution of
,
,
, and
reveals the overall and space-averaged motion of the submerged sliding mass. As shown in
Figure 7 and
Figure 8, the evolution of all the scaled coordinates of the control points are related to the impulse product parameter P. Accordingly, we presumed that the scaled coordinates of the control points at an indicated time can be fit with the impulse product parameter P. For the evaluation of the wave characteristics, researchers, commonly, simplified the predictive model and quantified the maximums of the wave parameters, such as maximum wave amplitude and maximum wave height, rather than the time series data. Quantifying the coordinates of the control points at the moment when the wave height reaches its maximum could be of interest for further analysis of the maximums of the wave parameters.
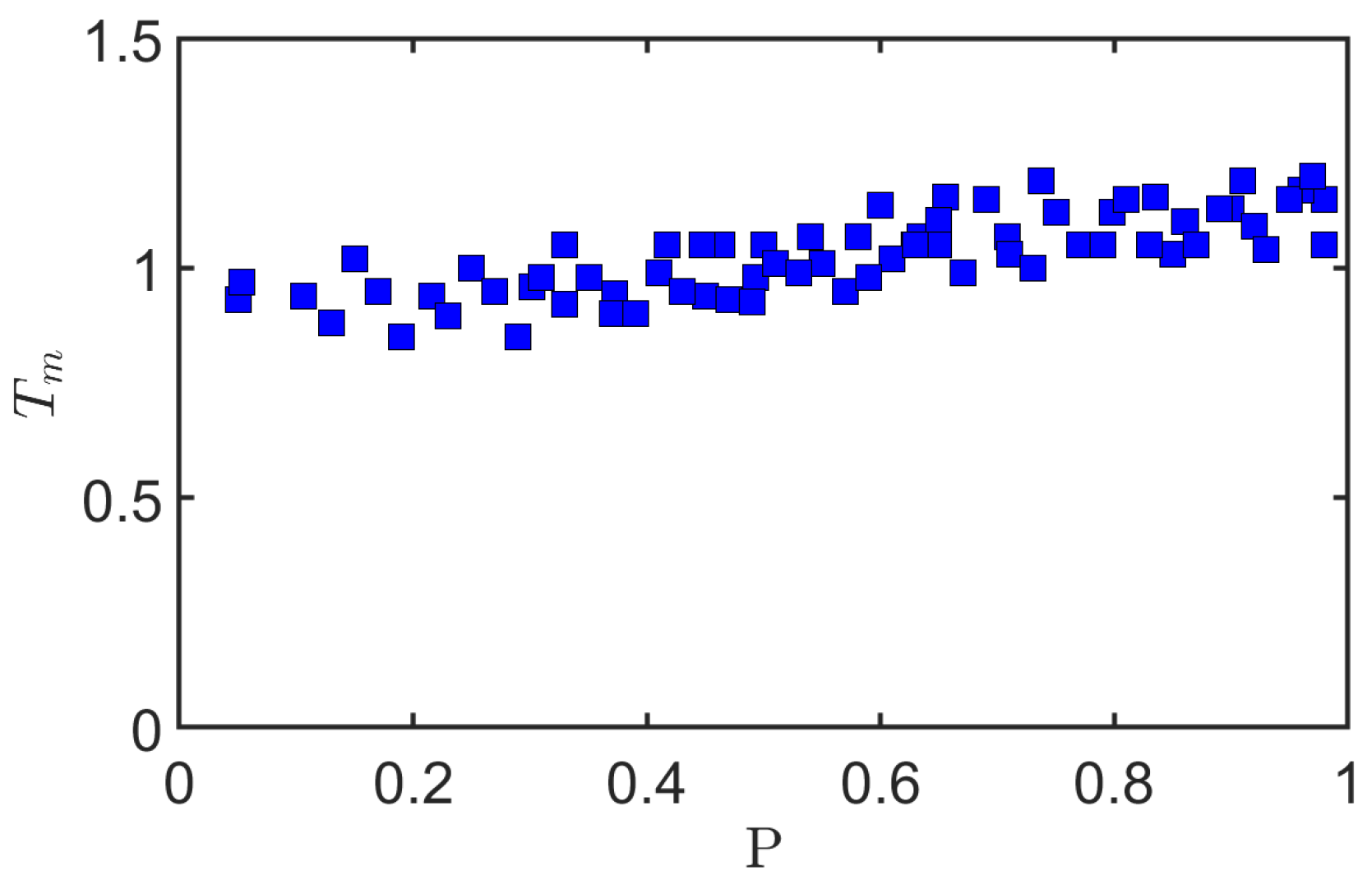
First, we defined the time taken, from the slide’s front entering the water body to the leading wave reaching its maximum height, as
effective time . Then, we scaled
as
, and defined
as
scaled effective time. As a first step, we determined the scaled effective time
for each experiment. As shown in
Figure 10, we found that the leading wave observed in most experiments arrives at its maximum height, approximately at the same time
∼1. With the increase in P,
the has a slight increasing tendency. Interestingly,
T∼1 was one of the important time nodes that was observed in the time evolution curves, in
Section 3.2.
To provide a quantitative analysis, we collected the scaled coordinates of the control points at the moment
and defined them as: scaled coordinate of the center of mass
, scaled horizontal coordinate of the frontal point
, and scaled vertical coordinate of the deepest point
. We then fit these parameters with the impulse product parameter P. Our previous study has demonstrated that the wave features including the scaled maximum wave height
and scaled maximum wave amplitude
can, also, be well fit with P for experiments conducted using Carbopol [
22].
Figure 11a,b displays
and
versus P. The solid line and the dashed lines denote the fitting curve and the ±30% derivation range, respectively. The best fitting equation for
was:
and the best fitting equation for
was:
with the coefficient of determination
for Equation (
5) and Equation (
6) as 0.903 and 0.897, respectively.
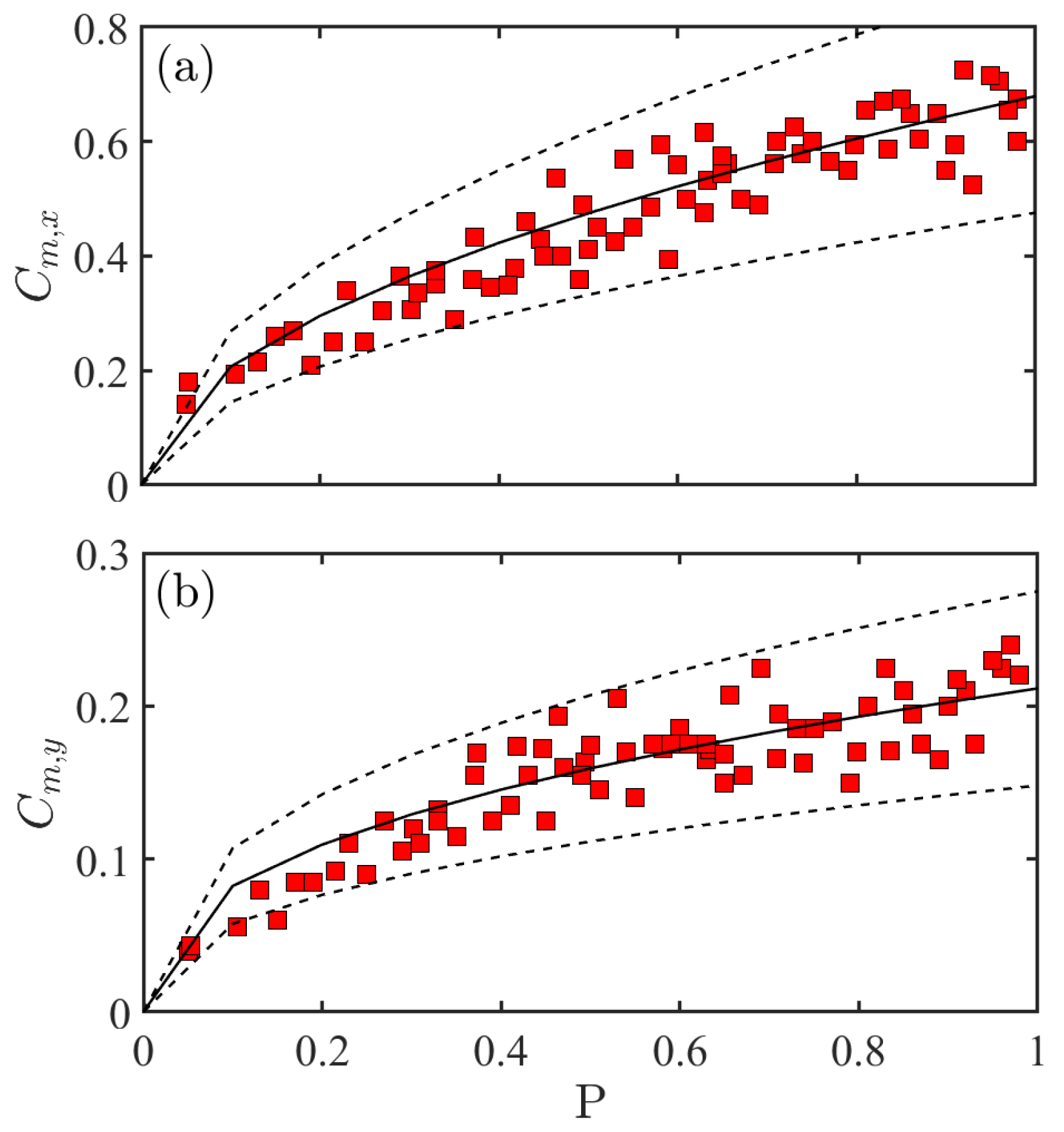
Figure 12a,b illustrates the variation of
and
with P, respectively. The best-fitting equation for
was:
The best fitting equation for
was:
The coefficient of determination , for the fitting equations of and , was 0.914 and 0.907, respectively.
The error range of most experimental data was within ±30% for Equations (
5)–(
8). Moreover, the coefficient of determination
for these four equations was larger than 0.8. It means that
,
,
, and
, at the moment
, can be well fit with the impulse product parameter P, in the format
, where
and
are constant, and
,
,
, and
. The motion of the submerged sliding mass is dominated by the interaction force, between the slide and water, and can be considered as an intermediate process of the momentum transfer process and wave generation. This explains why both the wave features and the motion of the submerged slide can be well fit with P. This, also, shows the necessity of considering the motion and deformation of the submerged slide in wave prediction.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}