
Recent Progress in Modeling and Control of Bio-Inspired Fish Robots

 , ,
, ,  , ,
, ,  , ,
, ,  and
and
Abstract
:1. Introduction
- How to identify and extract the extraordinary characteristics of fish, in order to establish effective physics models and explore the mechanisms;
- How to imitate the structure and control characteristics of fish in engineering design, and manufacture robot fish with high-performance parameters.
2. Bio-Inspired Propulsor and Sensor
2.1. Swimming Dynamics
2.1.1. Rigid Flapping Foil
2.1.2. Flexible Flapping Foil
2.1.3. Fin–Body Interaction
2.2. Underwater Sensing
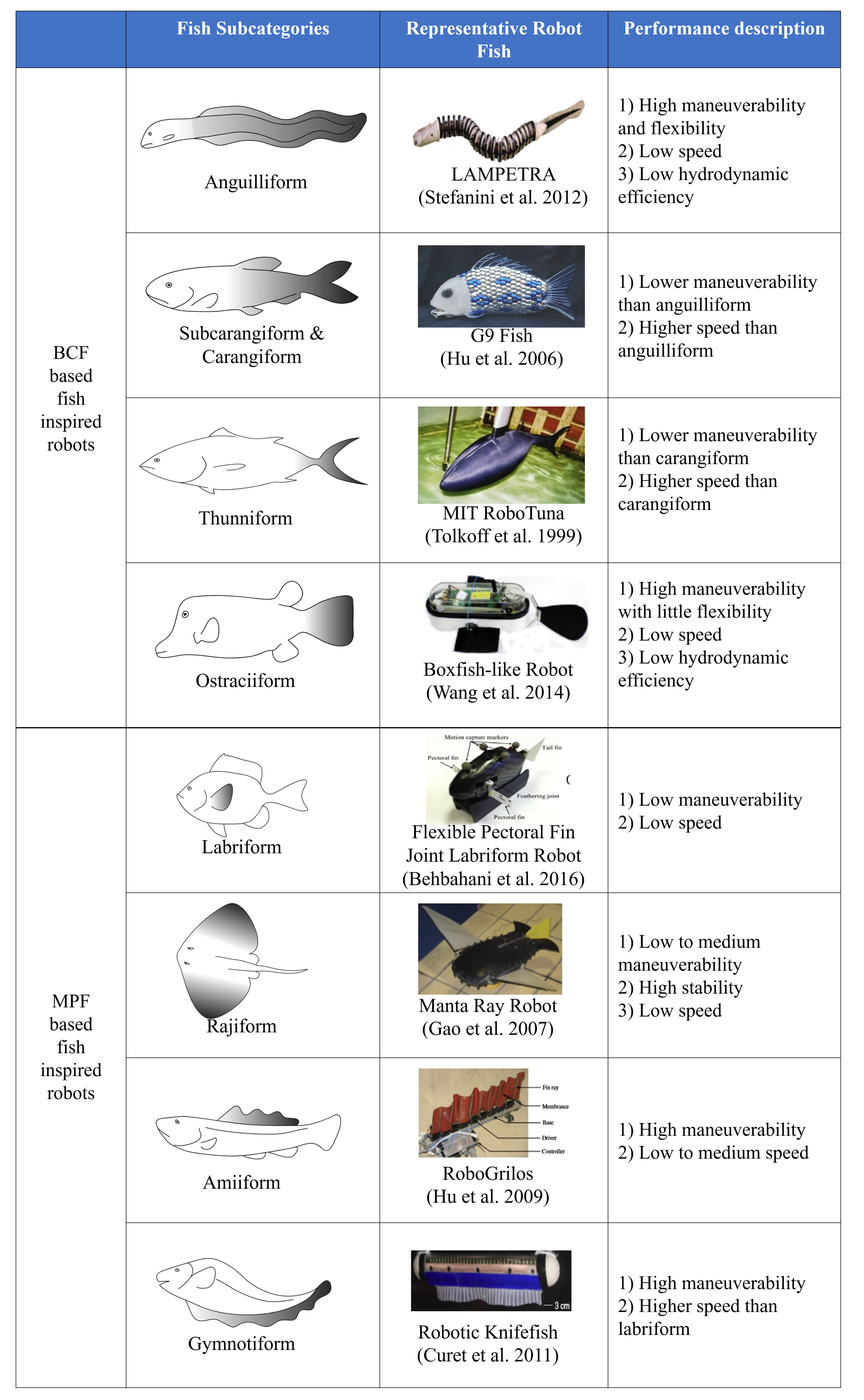
3. Classification of the Fish Inspired Robots
3.1. Robots in Anguilliform
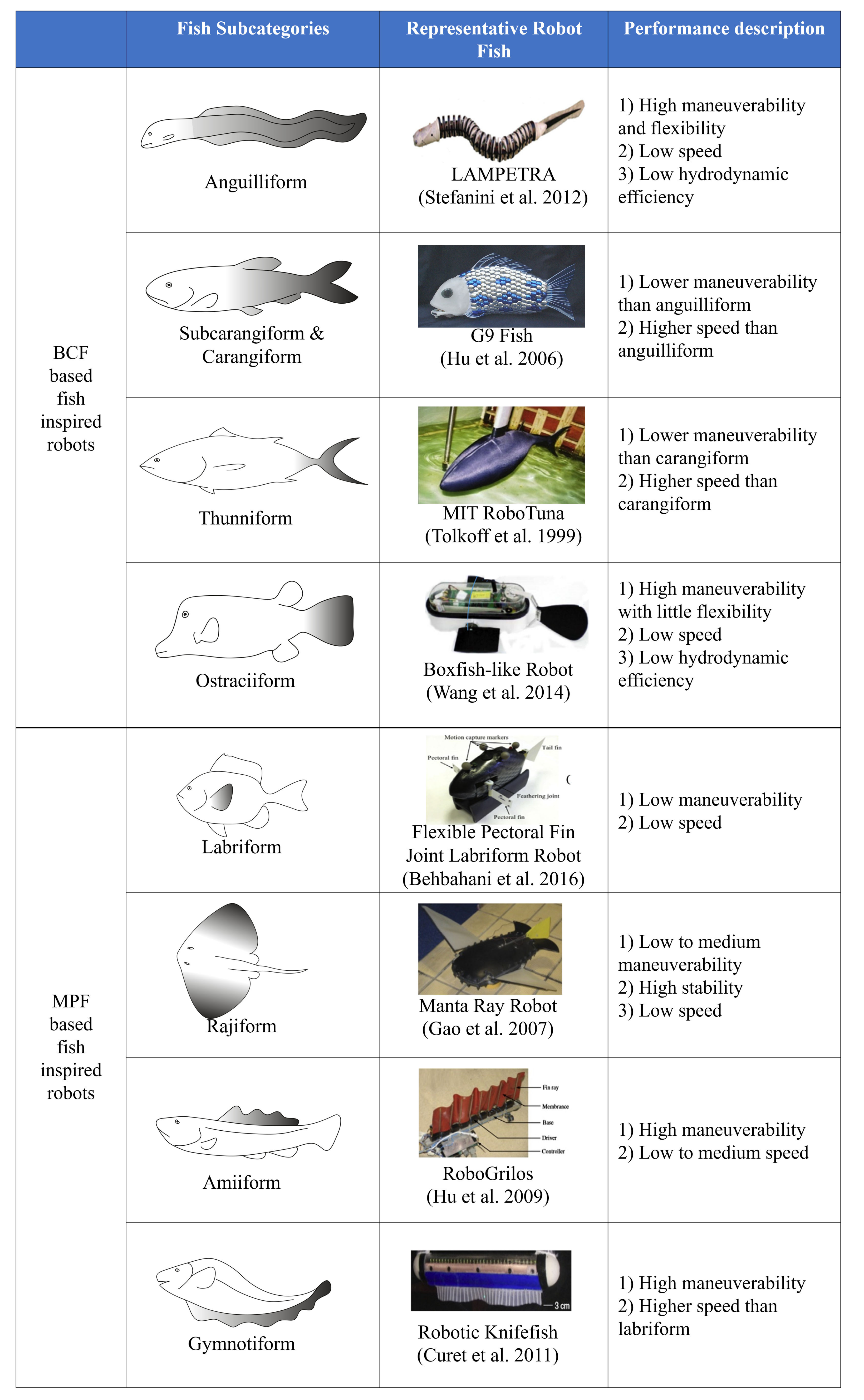
3.2. Robots in Subcarangiform and Carangiform
3.3. Robots in Thunniform
3.4. Robots in Ostraciiform
3.5. Robots in Labriform
3.6. Robots in Rajiform
3.7. Robots in Amiiform
3.8. Robots in Gymnotiform
3.9. Summary
4. Advanced Topics and Pioneering Directions
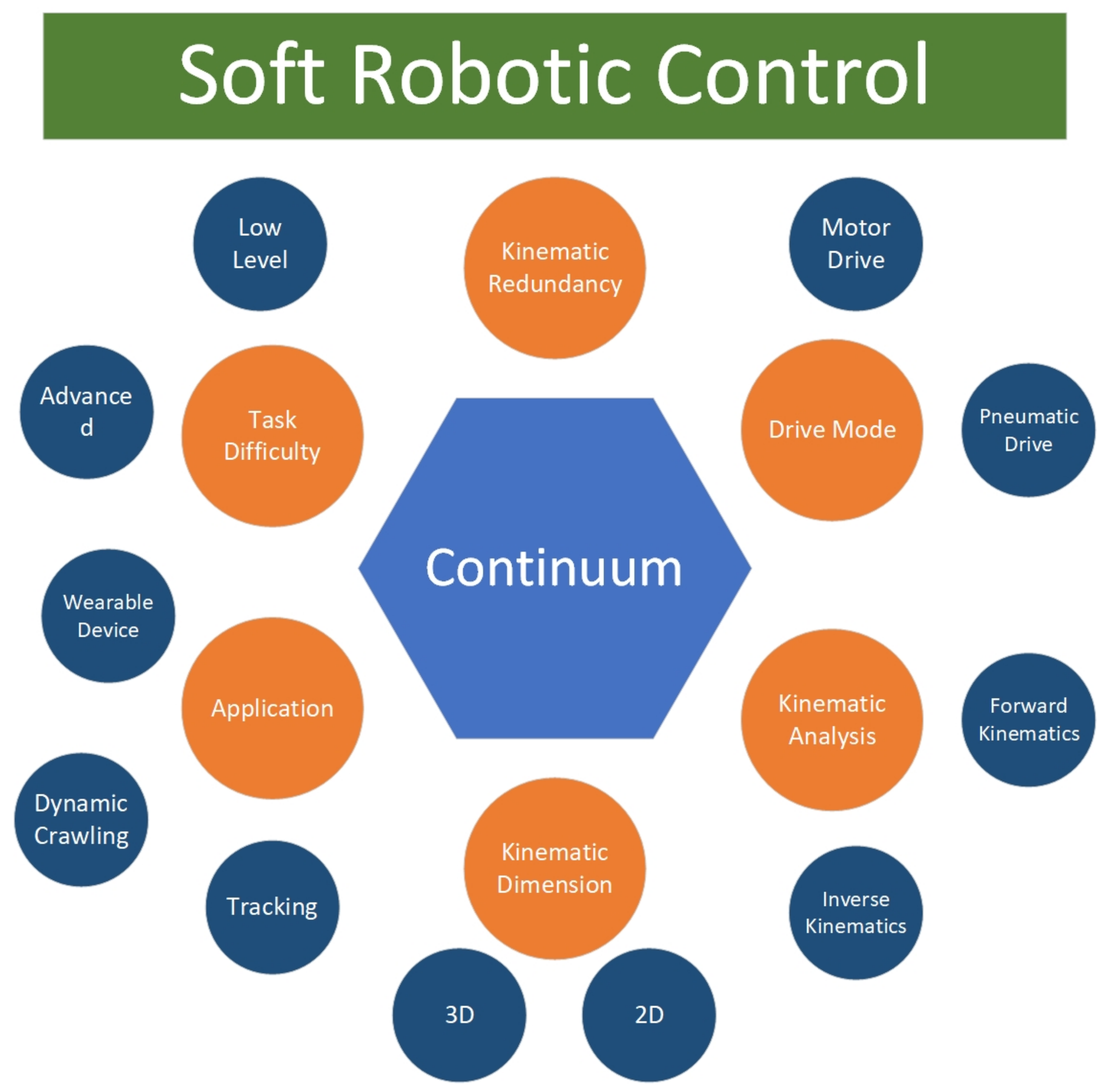
4.1. Soft Robotic Control
- Soft robots are naturally underactuated systems, which leads to difficulty in predicting their kinematics and dynamics [166].
- The fluid environment is complex, and the external force is difficult to quantify [167].
4.1.1. Model-Based Dynamic Control
4.1.2. Model-Free Dynamic Control
4.1.3. Hybrid Dynamic Control
4.1.4. Summary
4.2. Multi-Mode Robot
4.2.1. From Swimming to Flying
4.2.2. From Swimming to Walking
4.2.3. Summary
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Constants | |
| Thrust coefficient | |
| Power coefficient | |
| f | Flapping frequency |
| c | Chord length |
| Free-stream velocity | |
| Flapping reduce frequency; | |
| Effective velocity; | |
| Dimensionless velocity; | |
| h | Heave position |
| Fluid density | |
| Thrust | |
| A | Amplitude of the trailing edge |
| s | Wing span |
| Pitch angle | |
| Phase angle between heave and pitch motions | |
| Heave amplitude | |
| Strouhal number defined by heave; | |
| Strouhal number defined by pitch; | |
| Strouhal number; | |
| L | Characteristic length |
| Dimensionless trailing edge amplitude; | |
| Function of offset drag | |
| Dimensionless heave position; | |
| Dimensionless pitch angle; | |
| Reynolds number | |
| Coefficient related to |
Appendix A

References
- Trujillo, A.P.; Thurman, H.V. Essentials of Oceanography; Pearson: London, UK, 2017. [Google Scholar]
- Garrison, T.S. Oceanography: An Invitation to Marine Science. Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Jackson, S. Argo: The first ship? Rhein. Mus. Philol. 1997, 140, 249–257. [Google Scholar]
- Cui, W.C. An overview of submersible research and development in China. J. Mar. Sci. Appl. 2018, 17, 459–470. [Google Scholar] [CrossRef]
- Takagawa, S.; Takahashi, K.; Sano, T. 6500 m deep manned research submersible Shinkai 6500 system. In Proceedings of the OCEANS’89, Hamilton, OH, USA, 18–21 September 1989. [Google Scholar]
- Boillot, G.; Comas, M.C.; Girardeau, J.; Kornprobst, J.; Loreau, J.P.; Malod, J.; Mougenot, D.; Moullade, M. Preliminary results of the Galinaute cruise: Dives of the submersible Nautile on the western Galicia margin, Spain. In Proceedings of the Ocean Drilling Program Scientific Results; Boillot, G., Winterer, E.L., Eds.; 1988; Volume 103, pp. 37–51. Available online: https://www.researchgate.net/publication/265264256_Preliminary_Results_of_the_Galinaute_Cruise_Dives_of_the_Submersible_Nautile_on_the_Western_Galicia_Margin_Spain (accessed on 12 April 2022).
- Cui, W. Development of the Jiaolong deep manned submersible. Mar. Technol. Soc. J. 2013, 47, 37–54. [Google Scholar] [CrossRef]
- Cui, W.; Hu, Y.; Guo, W. Chinese journey to the challenger deep: The development and first phase of sea trial of an 11,000-m Rainbowfish ARV. Mar. Technol. Soc. J. 2017, 51, 23–35. [Google Scholar] [CrossRef]
- Wu, J.; Shi, K.; Liu, J.; Xu, H.; Wang, Y.; Li, Y.; Xu, C. Development and experimental research on the variable buoyancy system for the 6000m rated class “Qianlong I” AUV. J. Ocean Technol. 2014, 33, 1–7. [Google Scholar]
- YANG, B.; LIU, Y.; LIAO, J. Manned Submersibles—Deep-sea Scientific Research and Exploitation of Marine Resources. Bull. Chin. Acad. Sci. 2021, 36, 622–631. [Google Scholar]
- Yu, J.c.; Zhang, A.q.; Jin, W.m.; Chen, Q.; Tian, Y.; Liu, C.j. Development and experiments of the sea-wing underwater glider. China Ocean Eng. 2011, 25, 721–736. [Google Scholar] [CrossRef] [Green Version]
- Williams, S.B.; Newman, P.; Rosenblatt, J.; Dissanayake, G.; Durrant-Whyte, H. Autonomous underwater navigation and control. Robotica 2001, 19, 481–496. [Google Scholar] [CrossRef] [Green Version]
- Blidberg, D.R. Autonomous underwater vehicles: A tool for the ocean. Unmanned Syst. 1991, 9, 10–15. [Google Scholar]
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.M. The vorticity control unmanned undersea vehicle. In Proceeding of the International Symposium on Seawater Drag Reduction, Newport, RI, USA, 22–23 July 1998; pp. 479–484. [Google Scholar]
- Montgomery, J.; Coombs, S.; Halstead, M. Biology of the mechanosensory lateral line in fishes. Rev. Fish Biol. Fish. 1995, 5, 399–416. [Google Scholar] [CrossRef]
- Hino, H.; Miles, N.; Bandoh, H.; Ueda, H. Molecular biological research on olfactory chemoreception in fishes. J. Fish Biol. 2009, 75, 945–959. [Google Scholar] [CrossRef]
- Kramer, B. Electroreception and Communication in Fishes; Gustav Fischer: Stuttgart, Germany, 1996; Volume 42. [Google Scholar]
- Triantafyllou, M.S.; Triantafyllou, G.S. An efficient swimming machine. Sci. Am. 1995, 272, 64–70. [Google Scholar] [CrossRef]
- Soomro, A.M.; Memon, F.H.; Lee, J.W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D printed multi-material soft bio-inspired frog for underwater synchronous swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Fan, J.; Wang, S.; Yu, Q.; Zhu, Y. Swimming performance of the frog-inspired soft robot. Soft Robot. 2020, 7, 615–626. [Google Scholar] [CrossRef]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspiration Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef]
- Fras, J.; Noh, Y.; Macias, M.; Wurdemann, H.; Althoefer, K. Bio-inspired octopus robot based on novel soft fluidic actuator. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1583–1588. [Google Scholar]
- Wu, Q.; Yang, X.; Wu, Y.; Zhou, Z.; Wang, J.; Zhang, B.; Luo, Y.; Chepinskiy, S.A.; Zhilenkov, A.A. A novel underwater bipedal walking soft robot bio-inspired by the coconut octopus. Bioinspiration Biomim. 2021, 16, 046007. [Google Scholar] [CrossRef]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A soft jellyfish robot driven by a dielectric elastomer actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Cheng, T.; Li, G.; Liang, Y.; Zhang, M.; Liu, B.; Wong, T.W.; Forman, J.; Chen, M.; Wang, G.; Tao, Y.; et al. Untethered soft robotic jellyfish. Smart Mater. Struct. 2018, 28, 015019. [Google Scholar] [CrossRef]
- Norton, T.; Sun, D.W. Computational fluid dynamics (CFD)–an effective and efficient design and analysis tool for the food industry: A review. Trends Food Sci. Technol. 2006, 17, 600–620. [Google Scholar] [CrossRef]
- Salazar, R.; Fuentes, V.; Abdelkefi, A. Classification of biological and bioinspired aquatic systems: A review. Ocean Eng. 2018, 148, 75–114. [Google Scholar] [CrossRef]
- Gray, J. Studies in animal locomotion: VI. The propulsive powers of the dolphin. J. Exp. Biol. 1936, 13, 192–199. [Google Scholar] [CrossRef]
- Alben, S.; Witt, C.; Baker, T.V.; Anderson, E.; Lauder, G.V. Dynamics of freely swimming flexible foils. Phys. Fluids 2012, 24, 051901. [Google Scholar] [CrossRef] [Green Version]
- Shelton, R.M.; Thornycroft, P.J.; Lauder, G.V. Undulatory locomotion of flexible foils as biomimetic models for understanding fish propulsion. J. Exp. Biol. 2014, 217, 2110–2120. [Google Scholar] [CrossRef] [Green Version]
- Deng, J.; Sun, L.; Teng, L.; Pan, D.; Shao, X. The correlation between wake transition and propulsive efficiency of a flapping foil: A numerical study. Phys. Fluids 2016, 28, 094101. [Google Scholar] [CrossRef]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control. Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. [Google Scholar] [CrossRef]
- De Greef, A.; Lambert, P.; Delchambre, A. Towards flexible medical instruments: Review of flexible fluidic actuators. Precis. Eng. 2009, 33, 311–321. [Google Scholar] [CrossRef]
- Fan, D.; Yang, L.; Wang, Z.; Triantafyllou, M.S.; Karniadakis, G.E. Reinforcement learning for bluff body active flow control in experiments and simulations. Proc. Natl. Acad. Sci. USA 2020, 117, 26091–26098. [Google Scholar] [CrossRef]
- Fan, D.; Jodin, G.; Consi, T.; Bonfiglio, L.; Ma, Y.; Keyes, L.; Karniadakis, G.E.; Triantafyllou, M.S. A robotic intelligent towing tank for learning complex fluid-structure dynamics. Sci. Robot. 2019, 4, eaay5063. [Google Scholar] [CrossRef]
- Moored, K.W.; Quinn, D.B. Inviscid scaling laws of a self-propelled pitching airfoil. AIAA J. 2019, 57, 3686–3700. [Google Scholar] [CrossRef] [Green Version]
- Smits, A.J. Undulatory and oscillatory swimming. J. Fluid Mech. 2019, 874. [Google Scholar] [CrossRef] [Green Version]
- Triantafyllou, M.S.; Techet, A.H.; Hover, F.S. Review of experimental work in biomimetic foils. IEEE J. Ocean. Eng. 2004, 29, 585–594. [Google Scholar] [CrossRef] [Green Version]
- Floryan, D.; Van Buren, T.; Smits, A.J. Efficient cruising for swimming and flying animals is dictated by fluid drag. Proc. Natl. Acad. Sci. USA 2018, 115, 8116–8118. [Google Scholar] [CrossRef] [Green Version]
- Senturk, U.; Smits, A.J. Reynolds number scaling of the propulsive performance of a pitching airfoil. AIAA J. 2019, 57, 2663–2669. [Google Scholar] [CrossRef]
- Floryan, D.; Van Buren, T.; Smits, A.J. Large-amplitude oscillations of foils for efficient propulsion. Phys. Rev. Fluids 2019, 4, 093102. [Google Scholar] [CrossRef] [Green Version]
- Floryan, D.; Van Buren, T.; Rowley, C.W.; Smits, A.J. Scaling the propulsive performance of heaving and pitching foils. J. Fluid Mech. 2017, 822, 386–397. [Google Scholar] [CrossRef] [Green Version]
- Van Buren, T.; Floryan, D.; Smits, A.J. Scaling and performance of simultaneously heaving and pitching foils. AIAA J. 2019, 57, 3666–3677. [Google Scholar] [CrossRef]
- Theodorsen, T. General Theory of Aerodynamic Instability and The Mechanism of Flutter; NASA Reference Publication; NASA Ames Research Center Classical Aerodynamics Theory: Washington, DC, USA, 1979. [Google Scholar]
- Sedov, L.I.; Chu, C.; Cohen, H.; Seckler, B.; Gillis, J. Two-dimensional problems in hydrodynamics and aerodynamics. Phys. Today 1965, 18, 62. [Google Scholar] [CrossRef]
- Mivehchi, A.; Zhong, Q.; Kurt, M.; Quinn, D.B.; Moored, K.W. Scaling laws for the propulsive performance of a purely pitching foil in ground effect. J. Fluid Mech. 2021, 919. [Google Scholar] [CrossRef]
- Garrick, I. Propulsion of a flapping and oscillating airfoil. Rep. Natl. Advis. Comm. Aeronaut. NACA Rep. 1936, 567, 419–427. [Google Scholar]
- Quinn, D.B.; Moored, K.W.; Dewey, P.A.; Smits, A.J. Unsteady propulsion near a solid boundary. J. Fluid Mech. 2014, 742, 152–170. [Google Scholar] [CrossRef]
- Van Buren, T.; Floryan, D.; Quinn, D.; Smits, A. Nonsinusoidal gaits for unsteady propulsion. Phys. Rev. Fluids 2017, 2, 053101. [Google Scholar] [CrossRef]
- Floryan, D.; Van Buren, T.; Smits, A.J. Forces and energetics of intermittent swimming. Acta Mech. Sin. 2017, 33, 725–732. [Google Scholar] [CrossRef] [Green Version]
- Dewey, P.A.; Boschitsch, B.M.; Moored, K.W.; Stone, H.A.; Smits, A.J. Scaling laws for the thrust production of flexible pitching panels. J. Fluid Mech. 2013, 732, 29–46. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, X.; Tian, X.; Li, X.; Lu, W. A review on fluid dynamics of flapping foils. Ocean Engineering 2020, 195, 106712. [Google Scholar] [CrossRef]
- Alben, S.; Madden, P.G.; Lauder, G.V. The mechanics of active fin-shape control in ray-finned fishes. J. R. Soc. Interface 2007, 4, 243–256. [Google Scholar] [CrossRef] [Green Version]
- Leftwich, M.C.; Tytell, E.D.; Cohen, A.H.; Smits, A.J. Wake structures behind a swimming robotic lamprey with a passively flexible tail. J. Exp. Biol. 2012, 215, 416–425. [Google Scholar] [CrossRef] [Green Version]
- Lauder, G.V. Fish locomotion: Recent advances and new directions. Annu. Rev. Mar. Sci. 2015, 7, 521–545. [Google Scholar] [CrossRef] [Green Version]
- Marais, C.; Thiria, B.; Wesfreid, J.E.; Godoy-Diana, R. Stabilizing effect of flexibility in the wake of a flapping foil. J. Fluid Mech. 2012, 710, 659–669. [Google Scholar] [CrossRef] [Green Version]
- Shin, S.; Bae, S.Y.; Kim, I.C.; Kim, Y.J. Effects of flexibility on propulsive force acting on a heaving foil. Ocean Eng. 2009, 36, 285–294. [Google Scholar] [CrossRef]
- Katz, J.; Weihs, D. Hydrodynamic propulsion by large amplitude oscillation of an airfoil with chordwise flexibility. J. Fluid Mech. 1978, 88, 485–497. [Google Scholar] [CrossRef]
- Miao, J.M.; Ho, M.H. Effect of flexure on aerodynamic propulsive efficiency of flapping flexible airfoil. J. Fluids Struct. 2006, 22, 401–419. [Google Scholar] [CrossRef]
- Paraz, F.; Schouveiler, L.; Eloy, C. Thrust generation by a heaving flexible foil: Resonance, nonlinearities, and optimality. Phys. Fluids 2016, 28, 011903. [Google Scholar] [CrossRef]
- Alben, S. Optimal flexibility of a flapping appendage in an inviscid fluid. J. Fluid Mech. 2008, 614, 355–380. [Google Scholar] [CrossRef] [Green Version]
- Quinn, D.B.; Lauder, G.V.; Smits, A.J. Scaling the propulsive performance of heaving flexible panels. J. Fluid Mech. 2014, 738, 250–267. [Google Scholar] [CrossRef] [Green Version]
- Alben, S. Simulating the dynamics of flexible bodies and vortex sheets. J. Comput. Phys. 2009, 228, 2587–2603. [Google Scholar] [CrossRef]
- Quinn, D.B.; Lauder, G.V.; Smits, A.J. Maximizing the efficiency of a flexible propulsor using experimental optimization. J. Fluid Mech. 2015, 767, 430–448. [Google Scholar] [CrossRef] [Green Version]
- David, M.J.; Govardhan, R.; Arakeri, J. Thrust generation from pitching foils with flexible trailing edge flaps. J. Fluid Mech. 2017, 828, 70–103. [Google Scholar] [CrossRef]
- Anevlavi, D.E.; Filippas, E.S.; Karperaki, A.E.; Belibassakis, K.A. A non-linear BEM–FEM coupled scheme for the performance of flexible flapping-foil thrusters. J. Mar. Sci. Eng. 2020, 8, 56. [Google Scholar] [CrossRef] [Green Version]
- Floryan, D.; Rowley, C.W. Distributed flexibility in inertial swimmers. J. Fluid Mech. 2020, 888. [Google Scholar] [CrossRef] [Green Version]
- Kurt, M.; Mivehchi, A.; Moored, K. High-efficiency can be achieved for non-uniformly flexible pitching hydrofoils via tailored collective interactions. Fluids 2021, 6, 233. [Google Scholar] [CrossRef]
- Borazjani, I.; Sotiropoulos, F. On the role of form and kinematics on the hydrodynamics of self-propelled body/caudal fin swimming. J. Exp. Biol. 2010, 213, 89–107. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dewey, P.A.; Quinn, D.B.; Boschitsch, B.M.; Smits, A.J. Propulsive performance of unsteady tandem hydrofoils in a side-by-side configuration. Phys. Fluids 2014, 26, 041903. [Google Scholar] [CrossRef]
- Boschitsch, B.M.; Dewey, P.A.; Smits, A.J. Propulsive performance of unsteady tandem hydrofoils in an in-line configuration. Phys. Fluids 2014, 26, 051901. [Google Scholar] [CrossRef]
- Maertens, A.P.; Gao, A.; Triantafyllou, M.S. Optimal undulatory swimming for a single fish-like body and for a pair of interacting swimmers. J. Fluid Mech. 2017, 813, 301–345. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Ren, Y.; Dong, H.; Akanyeti, O.; Liao, J.C.; Lauder, G.V. Computational analysis of vortex dynamics and performance enhancement due to body–fin and fin–fin interactions in fish-like locomotion. J. Fluid Mech. 2017, 829, 65–88. [Google Scholar] [CrossRef] [Green Version]
- Brooks, S.A.; Green, M.A. Experimental study of body-fin interaction and vortex dynamics generated by a two degree-of-freedom fish model. Biomimetics 2019, 4, 67. [Google Scholar] [CrossRef] [Green Version]
- Khalid, M.S.U.; Wang, J.; Akhtar, I.; Dong, H.; Liu, M.; Hemmati, A. Larger wavelengths suit hydrodynamics of carangiform swimmers. Phys. Rev. Fluids 2021, 6, 073101. [Google Scholar] [CrossRef]
- Han, P.; Lauder, G.V.; Dong, H. Hydrodynamics of median-fin interactions in fish-like locomotion: Effects of fin shape and movement. Phys. Fluids 2020, 32, 011902. [Google Scholar]
- Han, P.; Liu, G.; Ren, Y.; Dong, H. Computational Analysis of 3D Fin-Fin Interaction in Fish’s Steady Swimming. In Proceedings of the Fluids Engineering Division Summer Meeting, American Society of Mechanical Engineers, Washington, DC, USA, 10–14 July 2016; Volume 50282, p. V01AT04A006. [Google Scholar]
- Wang, J.; Wainwright, D.K.; Lindengren, R.E.; Lauder, G.V.; Dong, H. Tuna locomotion: A computational hydrodynamic analysis of finlet function. J. R. Soc. Interface 2020, 17, 20190590. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Mangel, S.C. A circadian clock regulates rod and cone input to fish retinal cone horizontal cells. Proc. Natl. Acad. Sci. USA 1996, 93, 4655–4660. [Google Scholar] [CrossRef] [Green Version]
- Campana, S.E. Chemistry and composition of fish otoliths: Pathways, mechanisms and applications. Mar. Ecol. Prog. Ser. 1999, 188, 263–297. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.; Aggarwal, J. Intrinsic parameter calibration procedure for a (high-distortion) fish-eye lens camera with distortion model and accuracy estimation. Pattern Recognit. 1996, 29, 1775–1788. [Google Scholar] [CrossRef]
- Yu, J.; Wang, K.; Tan, M.; Zhang, J. Design and control of an embedded vision guided robotic fish with multiple control surfaces. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Zhao, W.; Wang, L. Vision-based target tracking and collision avoidance for two autonomous robotic fish. IEEE Trans. Ind. Electron. 2009, 56, 1401–1410. [Google Scholar]
- Yu, J.; Sun, F.; Xu, D.; Tan, M. Embedded vision-guided 3-D tracking control for robotic fish. IEEE Trans. Ind. Electron. 2015, 63, 355–363. [Google Scholar] [CrossRef]
- Chen, L.; Wang, S.; Hu, H.; Ryuh, Y.s.; Yang, G.H. 3D Mapping by a Robotic Fish with Two Mechanical Scanning Sonars. In Intelligent Autonomous Systems 13; Springer: Berlin/Heidelberg, Germany, 2016; pp. 691–703. [Google Scholar]
- Alessi, A.; Sudano, A.; Accoto, D.; Guglielmelli, E. Development of an autonomous robotic fish. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 1032–1037. [Google Scholar]
- El Daou, H.; Salumäe, T.; Chambers, L.D.; Megill, W.M.; Kruusmaa, M. Modelling of a biologically inspired robotic fish driven by compliant parts. Bioinspiration Biomim. 2014, 9, 016010. [Google Scholar] [CrossRef]
- Montgomery, J.C.; Baker, C.F.; Carton, A.G. The lateral line can mediate rheotaxis in fish. Nature 1997, 389, 960–963. [Google Scholar] [CrossRef]
- Haehnel-Taguchi, M.; Akanyeti, O.; Liao, J.C. Behavior, electrophysiology, and robotics experiments to study lateral line sensing in fishes. Integr. Comp. Biol. 2018, 58, 874–883. [Google Scholar] [CrossRef] [Green Version]
- Tang, Z.; Feng, H.; Lei, J.; Lu, J.; Wang, Z.; Fu, B.; Chen, W. Design and simulation of artificial fish lateral line. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418824826. [Google Scholar] [CrossRef]
- Wen, L.; Ren, Z.; Di Santo, V.; Hu, K.; Yuan, T.; Wang, T.; Lauder, G.V. Understanding fish linear acceleration using an undulatory biorobotic model with soft fluidic elastomer actuated morphing median fins. Soft Robot. 2018, 5, 375–388. [Google Scholar] [CrossRef]
- Crespi, A.; Karakasiliotis, K.; Guignard, A.; Ijspeert, A.J. Salamandra robotica II: An amphibious robot to study salamander-like swimming and walking gaits. IEEE Trans. Robot. 2013, 29, 308–320. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wen, L.; Liang, J.; Wu, G. Fuzzy vorticity control of a biomimetic robotic fish using a flapping lunate tail. J. Bionic Eng. 2010, 7, 56–65. [Google Scholar] [CrossRef]
- Raj, A.; Thakur, A. Fish-inspired robots: Design, sensing, actuation, and autonomy—A review of research. Bioinspiration Biomimetics 2016, 11, 031001. [Google Scholar] [CrossRef]
- Morgansen, K.A.; Triplett, B.I.; Klein, D.J. Geometric methods for modeling and control of free-swimming fin-actuated underwater vehicles. IEEE Trans. Robot. 2007, 23, 1184–1199. [Google Scholar] [CrossRef]
- Malec, M.; Morawski, M.; Zajac, J. Fish-like swimming prototype of mobile underwater robot. J. Autom. Mob. Robot. Intell. Syst. 2013, 4, 25–30. [Google Scholar]
- Tan, X.; Kim, D.; Usher, N.; Laboy, D.; Jackson, J.; Kapetanovic, A.; Rapai, J.; Sabadus, B.; Zhou, X. An autonomous robotic fish for mobile sensing. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5424–5429. [Google Scholar]
- Scaradozzi, D.; Palmieri, G.; Costa, D.; Pinelli, A. BCF swimming locomotion for autonomous underwater robots: A review and a novel solution to improve control and efficiency. Ocean Eng. 2017, 130, 437–453. [Google Scholar] [CrossRef]
- Blake, R.W. Fish functional design and swimming performance. J. Fish Biol. 2004, 65, 1193–1222. [Google Scholar] [CrossRef]
- Colgate, J.E.; Lynch, K.M. Mechanics and control of swimming: A review. IEEE J. Ocean. Eng. 2004, 29, 660–673. [Google Scholar] [CrossRef]
- Gillis, G.B. Undulatory locomotion in elongate aquatic vertebrates: Anguilliform swimming since Sir James Gray. Am. Zool. 1996, 36, 656–665. [Google Scholar] [CrossRef]
- Graham, J.B.; Lowell, W.R.; RUBINOFF, I.; MOTTA, J. Surface and subsurface swimming of the sea snake Pelamis platurus. J. Exp. Biol. 1987, 127, 27–44. [Google Scholar] [CrossRef]
- Rollinson, D.; Bilgen, Y.; Brown, B.; Enner, F.; Ford, S.; Layton, C.; Rembisz, J.; Schwerin, M.; Willig, A.; Velagapudi, P.; et al. Design and architecture of a series elastic snake robot. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4630–4636. [Google Scholar]
- Liljebäck, P.; Stavdahl, Ø.; Pettersen, K.Y.; Gravdahl, J.T. Mamba-A waterproof snake robot with tactile sensing. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 294–301. [Google Scholar]
- Yu, S.; Ma, S.; Li, B.; Wang, Y. An amphibious snake-like robot: Design and motion experiments on ground and in water. In Proceedings of the 2009 International Conference on Information and Automation, Zhuhai/Macau, China, 22–24 June 2009; pp. 500–505. [Google Scholar]
- Stefanini, C.; Orofino, S.; Manfredi, L.; Mintchev, S.; Marrazza, S.; Assaf, T.; Capantini, L.; Sinibaldi, E.; Grillner, S.; Wallen, P.; et al. A compliant bioinspired swimming robot with neuro-inspired control and autonomous behavior. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 5094–5098. [Google Scholar]
- Hu, H.; Liu, J.; Dukes, I.; Francis, G. Design of 3D swim patterns for autonomous robotic fish. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2406–2411. [Google Scholar]
- Tolkoff, S.W. Robotics and Power Measurements of the RoboTuna. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Wang, W.; Xie, G. CPG-based locomotion controller design for a boxfish-like robot. Int. J. Adv. Robot. Syst. 2014, 11, 87. [Google Scholar] [CrossRef]
- Behbahani, S.B.; Tan, X. Bio-inspired flexible joints with passive feathering for robotic fish pectoral fins. Bioinspiration Biomim. 2016, 11, 036009. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Bi, S.; Xu, Y.; Liu, C. Development and design of a robotic manta ray featuring flexible pectoral fins. In Proceedings of the 2007 IEEE international conference on robotics and biomimetics (ROBIO), Sanya, China, 15–18 December 2007; pp. 519–523. [Google Scholar]
- Hu, T.; Shen, L.; Lin, L.; Xu, H. Biological inspirations, kinematics modeling, mechanism design and experiments on an undulating robotic fin inspired by Gymnarchus niloticus. Mech. Mach. Theory 2009, 44, 633–645. [Google Scholar] [CrossRef]
- Curet, O.M.; Patankar, N.A.; Lauder, G.V.; MacIver, M.A. Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor. Bioinspiration Biomim. 2011, 6, 026004. [Google Scholar] [CrossRef] [Green Version]
- Crespi, A.; Badertscher, A.; Guignard, A.; Ijspeert, A.J. AmphiBot I: An amphibious snake-like robot. Robot. Auton. Syst. 2005, 50, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Crespi, A.; Ijspeert, A.J. Salamandra robotica: A biologically inspired amphibious robot that swims and walks. In Artificial life Models in Hardware; Springer: Berlin/Heidelberg, Germany, 2009; pp. 35–64. [Google Scholar]
- Hammond, L.; Altringham, J.D.; Wardle, C.S. Myotomal slow muscle function of rainbow trout Oncorhynchus mykiss during steady swimming. J. Exp. Biol. 1998, 201, 1659–1671. [Google Scholar] [CrossRef]
- Altringham, J.; Wardle, C.; Smith, C. Myotomal muscle function at different locations in the body of a swimming fish. J. Exp. Biol. 1993, 182, 191–206. [Google Scholar] [CrossRef]
- Yu, J.; Ding, R.; Yang, Q.; Tan, M.; Wang, W.; Zhang, J. On a bio-inspired amphibious robot capable of multimodal motion. IEEE/ASME Trans. Mechatron. 2011, 17, 847–856. [Google Scholar] [CrossRef]
- Koca, G.O.; Korkmaz, D.; Bal, C.; Akpolat, Z.H.; Ay, M. Implementations of the route planning scenarios for the autonomous robotic fish with the optimized propulsion mechanism. Measurement 2016, 93, 232–242. [Google Scholar] [CrossRef]
- Liu, J.; Dukes, I.; Hu, H. Novel mechatronics design for a robotic fish. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 807–812. [Google Scholar]
- Liu, J.; Hu, H. Mimicry of sharp turning behaviours in a robotic fish. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3318–3323. [Google Scholar]
- Ichikizaki, T.; Yamamoto, I. Development of robotic fish with various swimming functions. In Proceedings of the 2007 Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 378–383. [Google Scholar]
- Clapham, R.J.; Hu, H. iSplash-I: High performance swimming motion of a carangiform robotic fish with full-body coordination. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 322–327. [Google Scholar]
- Lau, W.P.; Zhong, Y.; Du, R.; Li, Z. Bladderless swaying wire-driven robot shark. In Proceedings of the 2015 IEEE 7th International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Siem Reap, Cambodia, 15–17 July 2015; pp. 155–160. [Google Scholar]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Proceedings of the Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 405–420. [Google Scholar]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef] [Green Version]
- Guinet, C.; Domenici, P.; de Stephanis, R.; Barrett-Lennard, L.; Ford, J.; Verborgh, P. Killer whale predation on bluefin tuna: Exploring the hypothesis of the endurance-exhaustion technique. Mar. Ecol. Prog. Ser. 2007, 347, 111–119. [Google Scholar] [CrossRef] [Green Version]
- Syme, D.A.; Shadwick, R.E. Red muscle function in stiff-bodied swimmers: There and almost back again. Philos. Trans. R. Soc. B 2011, 366, 1507–1515. [Google Scholar] [CrossRef] [Green Version]
- Wen, L.; Wang, T.; Wu, G.; Liang, J. Quantitative thrust efficiency of a self-propulsive robotic fish: Experimental method and hydrodynamic investigation. IEEE/Asme Trans. Mechatron. 2012, 18, 1027–1038. [Google Scholar] [CrossRef]
- Anderson, J.M.; Chhabra, N.K. Maneuvering and stability performance of a robotic tuna. Integr. Comp. Biol. 2002, 42, 118–126. [Google Scholar] [CrossRef] [Green Version]
- Mbemmo, E.; Chen, Z.; Shatara, S.; Tan, X. Modeling of biomimetic robotic fish propelled by an ionic polymer-metal composite actuator. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 689–694. [Google Scholar]
- Kopman, V.; Porfiri, M. Design, modeling, and characterization of a miniature robotic fish for research and education in biomimetics and bioinspiration. IEEE/ASME Trans. Mechatron. 2012, 18, 471–483. [Google Scholar] [CrossRef]
- Shen, F.; Wei, C.; Cao, Z.; Xu, D.; Yu, J.; Zhou, C. Implementation of a multi-link robotic dolphin with two 3-DOF flippers. J. Comput. Inform. Syst. 2011, 7, 2601–2607. [Google Scholar]
- Yu, J.; Wei, C. Towards development of a slider-crank centered self-propelled dolphin robot. Adv. Robot. 2013, 27, 971–977. [Google Scholar] [CrossRef]
- Wu, Z.; Yu, J.; Yuan, J.; Tan, M.; Zhang, J. Mechatronic design and implementation of a novel gliding robotic dolphin. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 267–272. [Google Scholar]
- Yu, J.; Su, Z.; Wu, Z.; Tan, M. Development of a fast-swimming dolphin robot capable of leaping. IEEE/ASME Trans. Mechatron. 2016, 21, 2307–2316. [Google Scholar] [CrossRef]
- Hove, J.; O’Bryan, L.; Gordon, M.S.; Webb, P.W.; Weihs, D. Boxfishes (Teleostei: Ostraciidae) as a model system for fishes swimming with many fins: Kinematics. J. Exp. Biol. 2001, 204, 1459–1471. [Google Scholar] [CrossRef]
- Lachat, D.; Crespi, A.; Ijspeert, A.J. Boxybot: A swimming and crawling fish robot controlled by a central pattern generator. In Proceedings of the The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics 2006, BioRob, Pisa, Italy, 20–26 February 2006; pp. 643–648. [Google Scholar]
- Kodati, P.; Hinkle, J.; Winn, A.; Deng, X. Microautonomous robotic ostraciiform (MARCO): Hydrodynamics, design, and fabrication. IEEE Trans. Robot. 2008, 24, 105–117. [Google Scholar] [CrossRef]
- Mainong, A.; Ayob, A.; Arshad, M. Investigating pectoral shapes and locomotive strategies for conceptual designing bio-inspired robotic fish. J. Eng. Sci. Technol. 2017, 12, 001–014. [Google Scholar]
- Korsmeyer, K.E.; Steffensen, J.F.; Herskin, J. Energetics of median and paired fin swimming, body and caudal fin swimming, and gait transition in parrotfish (Scarus schlegeli) and triggerfish (Rhinecanthus aculeatus). J. Exp. Biol. 2002, 205, 1253–1263. [Google Scholar] [CrossRef]
- Sitorus, P.E.; Nazaruddin, Y.Y.; Leksono, E.; Budiyono, A. Design and implementation of paired pectoral fins locomotion of labriform fish applied to a fish robot. J. Bionic Eng. 2009, 6, 37–45. [Google Scholar] [CrossRef]
- Behbahani, S.B.; Tan, X. Design and modeling of flexible passive rowing joint for robotic fish pectoral fins. IEEE Trans. Robot. 2016, 32, 1119–1132. [Google Scholar] [CrossRef]
- Zhang, S.; Qian, Y.; Liao, P.; Qin, F.; Yang, J. Design and control of an agile robotic fish with integrative biomimetic mechanisms. IEEE/ASME Trans. Mechatron. 2016, 21, 1846–1857. [Google Scholar] [CrossRef]
- Rosenberger, L.J. Pectoral fin locomotion in batoid fishes: Undulation versus oscillation. J. Exp. Biol. 2001, 204, 379–394. [Google Scholar] [CrossRef]
- Low, K.; Zhou, C.; Seet, G.; Bi, S.; Cai, Y. Improvement and testing of a robotic manta ray (RoMan-III). In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Thailand, 7–11 December 2011; pp. 1730–1735. [Google Scholar]
- Cai, Y.; Bi, S.; Zhang, L.; Gao, J. Design of a robotic fish propelled by oscillating flexible pectoral foils. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2138–2142. [Google Scholar]
- Chen, Z.; Um, T.I.; Bart-Smith, H. Bio-inspired robotic manta ray powered by ionic polymer–metal composite artificial muscles. Int. J. Smart Nano Mater. 2012, 3, 296–308. [Google Scholar] [CrossRef] [Green Version]
- y Alvarado, P.V.; Chin, S.; Larson, W.; Mazumdar, A.; Youcef-Toumi, K. A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example. In Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; pp. 473–478. [Google Scholar]
- Chew, C.M.; Lim, Q.Y.; Yeo, K. Development of propulsion mechanism for Robot Manta Ray. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 1918–1923. [Google Scholar]
- Yang, S.b.; Qiu, J.; Han, X.y. Kinematics modeling and experiments of pectoral oscillation propulsion robotic fish. J. Bionic Eng. 2009, 6, 174–179. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, D.; Zhou, C.; Chong, C.; Hu, T.; Shen, L.; Low, K. Better endurance and load capacity: An underwater vehicle inspired by manta ray. In Proceedings of the The Fourth International Symposium on Aero Aqua Bio-Mechanisms (ISABMEC2009), Shanghai, China, 9 August–2 September 2009. [Google Scholar]
- Zhou, C.; Low, K.H. Better endurance and load capacity: An improved design of manta ray robot (RoMan-II). J. Bionic Eng. 2010, 7, S137–S144. [Google Scholar] [CrossRef]
- Zhou, C.; Low, K. Design and locomotion control of a biomimetic underwater vehicle with fin propulsion. IEEE/ASME Trans. Mechatron. 2011, 17, 25–35. [Google Scholar] [CrossRef]
- Punning, A.; Anton, M.; Kruusmaa, M.; Aabloo, A. A biologically inspired ray-like underwater robot with electroactive polymer pectoral fins. In Proceedings of the International IEEE Conference on Mechatronics and Robotics, Chengdu, China, 26–31 August 2004; Volume 2004, pp. 241–245. [Google Scholar]
- Takagi, K.; Yamamura, M.; Luo, Z.W.; Onishi, M.; Hirano, S.; Asaka, K.; Hayakawa, Y. Development of a rajiform swimming robot using ionic polymer artificial muscles. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1861–1866. [Google Scholar]
- Krishnamurthy, P.; Khorrami, F.; De Leeuw, J.; Porter, M.; Livingston, K.; Long, J. An electric ray inspired biomimetic autonomous underwater vehicle. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 5224–5229. [Google Scholar]
- Park, S.J.; Gazzola, M.; Park, K.S.; Park, S.; Di Santo, V.; Blevins, E.L.; Lind, J.U.; Campbell, P.H.; Dauth, S.; Capulli, A.K.; et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016, 353, 158–162. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jagnandan, K.; Sanford, C.P. Kinematics of ribbon-fin locomotion in the bowfin, Amia calva. J. Exp. Zool. Part A 2013, 319, 569–583. [Google Scholar] [CrossRef]
- Xie, H.; Zhou, H.; Shen, L.; Yin, D. Mechanism design, dynamics modelling and experiments of bionic undulating fins. Int. J. Robot. Autom. 2016, 31. [Google Scholar] [CrossRef] [Green Version]
- Youngerman, E.D.; Flammang, B.E.; Lauder, G.V. Locomotion of free-swimming ghost knifefish: Anal fin kinematics during four behaviors. Zoology 2014, 117, 337–348. [Google Scholar] [CrossRef]
- Siahmansouri, M.; Ghanbari, A.; Fakhrabadi, M.M.S. Design, implementation and control of a fish robot with undulating fins. Int. J. Adv. Robot. Syst. 2011, 8, 60. [Google Scholar] [CrossRef]
- Liu, F.; Lee, K.M.; Yang, C.J. Hydrodynamics of an undulating fin for a wave-like locomotion system design. IEEE/ASME Trans. Mechatron. 2011, 17, 554–562. [Google Scholar] [CrossRef]
- Zhong, Y.; Song, J.; Yu, H.; Du, R. Toward a transform method from lighthill fish swimming model to biomimetic robot fish. IEEE Robot. Autom. Lett. 2018, 3, 2632–2639. [Google Scholar] [CrossRef]
- Yu, J.; Wang, M.; Dong, H.; Zhang, Y.; Wu, Z. Motion control and motion coordination of bionic robotic fish: A review. J. Bionic Eng. 2018, 15, 579–598. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef]
- Della Santina, C.; Katzschmann, R.K.; Biechi, A.; Rus, D. Dynamic control of soft robots interacting with the environment. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Brisbane, QLD, Australia, 21–25 May 2018; pp. 46–53. [Google Scholar]
- Katzschmann, R.K.; Della Santina, C.; Toshimitsu, Y.; Bicchi, A.; Rus, D. Dynamic motion control of multi-segment soft robots using piecewise constant curvature matched with an augmented rigid body model. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 454–461. [Google Scholar]
- Della Santina, C.; Katzschmann, R.K.; Bicchi, A.; Rus, D. Model-based dynamic feedback control of a planar soft robot: Trajectory tracking and interaction with the environment. Int. J. Robot. Res. 2020, 39, 490–513. [Google Scholar] [CrossRef]
- Della Santina, C. The soft inverted pendulum with affine curvature. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Korea, 14–18 December 2020; pp. 4135–4142. [Google Scholar]
- Thieffry, M. Model-Based Dynamic Control of Soft Robots. Ph.D. Thesis, Université Polytechnique des Hauts-de-France, Valenciennes, France, 2019. [Google Scholar]
- Wang, C.; Frazelle, C.G.; Wagner, J.R.; Walker, I.D. A Discrete-Jointed Robot Model Based Control Strategy for Spatial Continuum Manipulators. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 19–21 October 2020; pp. 543–549. [Google Scholar]
- Della Santina, C.; Duriez, C.; Rus, D. Model based control of soft robots: A survey of the state of the art and open challenges. arXiv 2021, arXiv:2110.01358. [Google Scholar]
- Schegg, P.; Duriez, C. Review on generic methods for mechanical modeling, simulation and control of soft robots. PLoS ONE 2022, 17, e0251059. [Google Scholar] [CrossRef]
- Zhang, H.; Cao, R.; Zilberstein, S.; Wu, F.; Chen, X. Toward effective soft robot control via reinforcement learning. In Proceedings of the International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 173–184. [Google Scholar]
- George Thuruthel, T.; Falotico, E.; Manti, M.; Pratesi, A.; Cianchetti, M.; Laschi, C. Learning closed loop kinematic controllers for continuum manipulators in unstructured environments. Soft Robot. 2017, 4, 285–296. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Hassan, T.; Falotico, E.; Ansari, Y.; Cianchetti, M.; Laschi, C. Closed loop control of a braided-structure continuum manipulator with hybrid actuation based on learning models. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; pp. 116–122. [Google Scholar]
- Zhou, Y.; Ju, M.; Zheng, G. Closed-loop control of soft robot based on machine learning. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4543–4547. [Google Scholar]
- Bern, J.M.; Schnider, Y.; Banzet, P.; Kumar, N.; Coros, S. Soft robot control with a learned differentiable model. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 417–423. [Google Scholar]
- Wang, X.; Li, Y.; Kwok, K.W. A Survey for Machine Learning-Based Control of Continuum Robots. Front. Robot. AI 2021, 280. [Google Scholar] [CrossRef]
- Zhao, W.; Queralta, J.P.; Westerlund, T. Sim-to-real transfer in deep reinforcement learning for robotics: A survey. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, Australia, 1–4 December 2020; pp. 737–744. [Google Scholar]
- Li, G.; Shintake, J.; Hayashibe, M. Deep Reinforcement Learning Framework for Underwater Locomotion of Soft Robot. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an China, May 30–June 5 2021; pp. 12033–12039. [Google Scholar]
- Ji, G.; Yan, J.; Du, J.; Yan, W.; Chen, J.; Lu, Y.; Rojas, J.; Cheng, S.S. Towards Safe Control of Continuum Manipulator Using Shielded Multiagent Reinforcement Learning. IEEE Robot. Autom. Lett. 2021, 6, 7461–7468. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Li, Y.; He, H.; Wu, J.; Katabi, D.; Torralba, A. Learning compositional koopman operators for model-based control. arXiv 2019, arXiv:1910.08264. [Google Scholar]
- Hyatt, P.; Wingate, D.; Killpack, M.D. Model-based control of soft actuators using learned non-linear discrete-time models. Front. Robot. AI 2019, 6, 22. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Wang, Z.; Jin, Y.; Chen, X.; Li, P.; Gan, Y.; Lin, S.; Chen, X. Design, control, and applications of a soft robotic arm. arXiv 2020, arXiv:2007.04047. [Google Scholar]
- Li, P.; Wang, G.; Jiang, H.; Jin, Y.; Gan, Y.; Chen, X.; Ji, J. A Q-learning Control Method for a Soft Robotic Arm Utilizing Training Data from a Rough Simulator. arXiv 2021, arXiv:2109.05795. [Google Scholar]
- Fang, G.; Tian, Y.; Yang, Z.X.; Geraedts, J.M.; Wang, C.C. Efficient Jacobian-Based Inverse Kinematics of Soft Robots by Learning. arXiv 2020, arXiv:2012.13965. [Google Scholar]
- Tang, Z.Q.; Heung, H.L.; Tong, K.Y.; Li, Z. Model-based online learning and adaptive control for a “human-wearable soft robot” integrated system. Int. J. Robot. Res. 2021, 40, 256–276. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, T.; Zhao, B.; He, Y.; Hu, Y.; Li, B.; Zhang, P.; Meng, M.Q.H. Hybrid adaptive control strategy for continuum surgical robot under external load. IEEE Robot. Autom. Lett. 2021, 6, 1407–1414. [Google Scholar] [CrossRef]
- Lu, D.; Xiong, C.; Lyu, B.; Zeng, Z.; Lian, L. Multi-Mode Hybrid Aerial Underwater Vehicle with Extended Endurance. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Weisshaar, T.A. Morphing Aircraft Systems: Historical Perspectives and Future Challenges. J. Aircr. 2013, 50, 337–353. [Google Scholar] [CrossRef]
- Pearson, F.C., II. The Way ahead for maritime UAVS; Naval War Coll Newport RI Joint Military Operations Dept. 2006. Available online: ttps://www.researchgate.net/publication/235100505TheWayAheadForMaritimeUAVS (accessed on 12 April 2022).
- Sweetman, B. Elusive Shipboard UAV Finally Nears Operational Capability. 2004. Available online: https://www.researchgate.net/publication/294587088_Elusive_shipboard_UAV_finally_nears_operational_capability (accessed on 12 April 2022).
- U.S. Navy Launches XFC UAV from Submerged Submarine. Available online: http://www.navyrecognition.com/index.php/focus-analysis/naval-technology/1405-us-navy-launches-xfc-uav-from-submerged-submarine.html (accessed on 12 April 2022).
- U.S. Successfully Launches Drone from Submerged Submarine. Available online: https://www.cnn.com/2013/12/06/us/submarine-drone-launch/index.html (accessed on 12 April 2022).
- Warren, W.; William, S.; B, A.M.; J, P.K.; Ashok, G.; Matthew, B. Testing and Characterization of a Fixed Wing Cross-Domain Unmanned Vehicle Operating in Aerial and Underwater Environments. IEEE J. Ocean. Eng. 2018, 43, 969–982. [Google Scholar]
- Aerospace Engineering. News Update Autumn 2007. Available online: https://www.sheffield.ac.uk/polopoly_fs/1.135132!/file/Newsletter-nov-2007-08.pdf (accessed on 25 May 2020).
- Drews, P.L.J.; Neto, A.A.; Campos, M.F. Hybrid Unmanned Aerial Underwater Vehicle: Modeling and simulation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; 2014; pp. 4637–4642. [Google Scholar]
- Villegas, A.; Mishkevich, V.; Gulak, Y.; Diez, F.J. Analysis of key elements to evaluate the performance of a multirotor unmanned aerial–aquatic vehicle. Aerosp. Sci. Technol. 2017, 70, 412–418. [Google Scholar] [CrossRef]
- Techbriefs Media Group. Available online: https://www.techbriefs.com/component/content/article/tb/tv/31371 (accessed on 19 July 2021).
- Di, L.; Xiong, C.; Zhou, H.; Lyu, C.; Hu, R.; Yu, C.; Zeng, Z.; Lian, L. Design, fabrication, and characterization of a multimodal hybrid aerial underwater vehicle. Ocean Eng. 2021, 219, 108324. [Google Scholar]
- Fish, F.E. Wing design and scaling of flying fish with regard to flight performance. J. Zool. 1990, 221, 391–403. [Google Scholar] [CrossRef]
- Gao, A.; Techet, A.H. Design considerations for a robotic flying fish. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–8. [Google Scholar]
- Geder, J.D.; Ramamurti, R.; Palmisano, J.; Pruessner, M.; Ratna, B.; Sandberg, W.C. Scaling Studies for an Actively Controlled Curvature Robotic Pectoral Fin. In Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7508, pp. 141–150. [Google Scholar]
- Geder, J.D.; Ramamurti, R.; Edwards, D.; Young, T.; Pruessner, M. Swimming performance of a hybrid unmanned air-underwater vehicle. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 9–23 September 2016; pp. 1–5. [Google Scholar]
- Geder, J.D.; Ramamurti, R.; Edwards, D.; Young, T.; Pruessner, M. Development of a Robotic Fin for Hydrodynamic Propulsion and Aerodynamic Control. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar]
- Sampath, K.; Geder, J.D.; Ramamurti, R.; Pruessner, M.D.; Koehler, R. Hydrodynamics of tandem flapping pectoral fins with varying stroke phase offsets. Phys. Rev. Fluids 2020, 5, 094101. [Google Scholar] [CrossRef]
- Hybrid Aerial Underwater Vehicle (MIT Lincoln Lab). Available online: https://phoenixfiles.olin.edu/do/23bf82e5-0d2c-471c-a8d2-62a51d619b16 (accessed on 12 April 2022).
- Siddall, R.; Kovac, M. Fast Aquatic Escape With a Jet Thruster. IEEE/ASME Trans. Mechatron. 2017, 22, 217–226. [Google Scholar] [CrossRef] [Green Version]
- Siddall, R.; Ancel, A.O.; Kovac, M. Wind and water tunnel testing of a morphing aquatic micro air vehicle. Interface Focus 2017, 7, 20160085. [Google Scholar] [CrossRef] [PubMed]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dudek, G.; Giguere, P.; Prahacs, C.; Saunderson, S.; Sattar, J.; Torres-Mendez, L.; Jenkin, M.; German, A.; Hogue, A.; Ripsman, A.; et al. AQUA: An Amphibious Autonomous Robot. Computer 2007, 40, 46–53. [Google Scholar] [CrossRef]
- Dey, B.B.; Manjanna, S.; Dudek, G. Ninja legs: Amphibious one degree of freedom robotic legs. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5622–5628. [Google Scholar]
- Picardi, G.; Chellapurath, M.; Lacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Crespi, A.; Ryczko, D.; Cabelguen, J.M. From swimming to walking with a salamander robot driven by a spinal cord model. Science 2007, 315, 1416–1420. [Google Scholar] [CrossRef] [Green Version]
- Rafeeq, M.; Toha, S.F.; Ahmad, S.; Yusof, M.S.M.; Razib, M.A.M.; Bahrin, M.I.H.S. Design and Modeling of Klann Mechanism-Based Paired Four Legged Amphibious Robot. IEEE Access 2021, 9, 166436–166445. [Google Scholar] [CrossRef]
- Chi, X.; Zhan, Q. Design and Modelling of an Amphibious Spherical Robot Attached with Assistant Fins. Appl. Sci. 2021, 11, 3739. [Google Scholar] [CrossRef]
- Guo, S.; Cao, S.; Guo, J. Study on Decentralization of Spherical Amphibious Multi-robot Control System Based on Smart Contract and Blockchain. J. Bionic Eng. 2021, 18, 1317–1330. [Google Scholar] [CrossRef]
- Xing, H.; Shi, L.; Hou, X.; Liu, Y.; Hu, Y.; Xia, D.; Li, Z.; Guo, S. Design, modeling and control of a miniature bio-inspired amphibious spherical robot. Mechatronics 2021, 77, 102574. [Google Scholar] [CrossRef]
- Yin, S.; Hu, Q.; Zeng, Y.; Wei, C.; Chen, Z. Kinetic Analysis and Design of a Bio-Inspired Amphibious Robot with Two Undulatory Fins. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; pp. 1368–1373. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Subclass | Progress and Advantages | Disadvantages and Limitations |
|---|---|---|---|
| Air-aquatic | Fish-like [206,207,208,211] | The foundation of experimental data and theoretical basis [206]; Demonstration of the difficulty in achieving the ideal exit velocity [207] ; Multi-domain fin effects verification [208] | One-directional operation [207,208]. |
| Bird-like [212,213,214] | A new approach of trans-media operation [212]; Two-directional trans-media operation [213]. | Incapable of complex missions or verifying the circumstance [212]; Conventional propeller propulsion increasing structural weight and system complexity [213]. | |
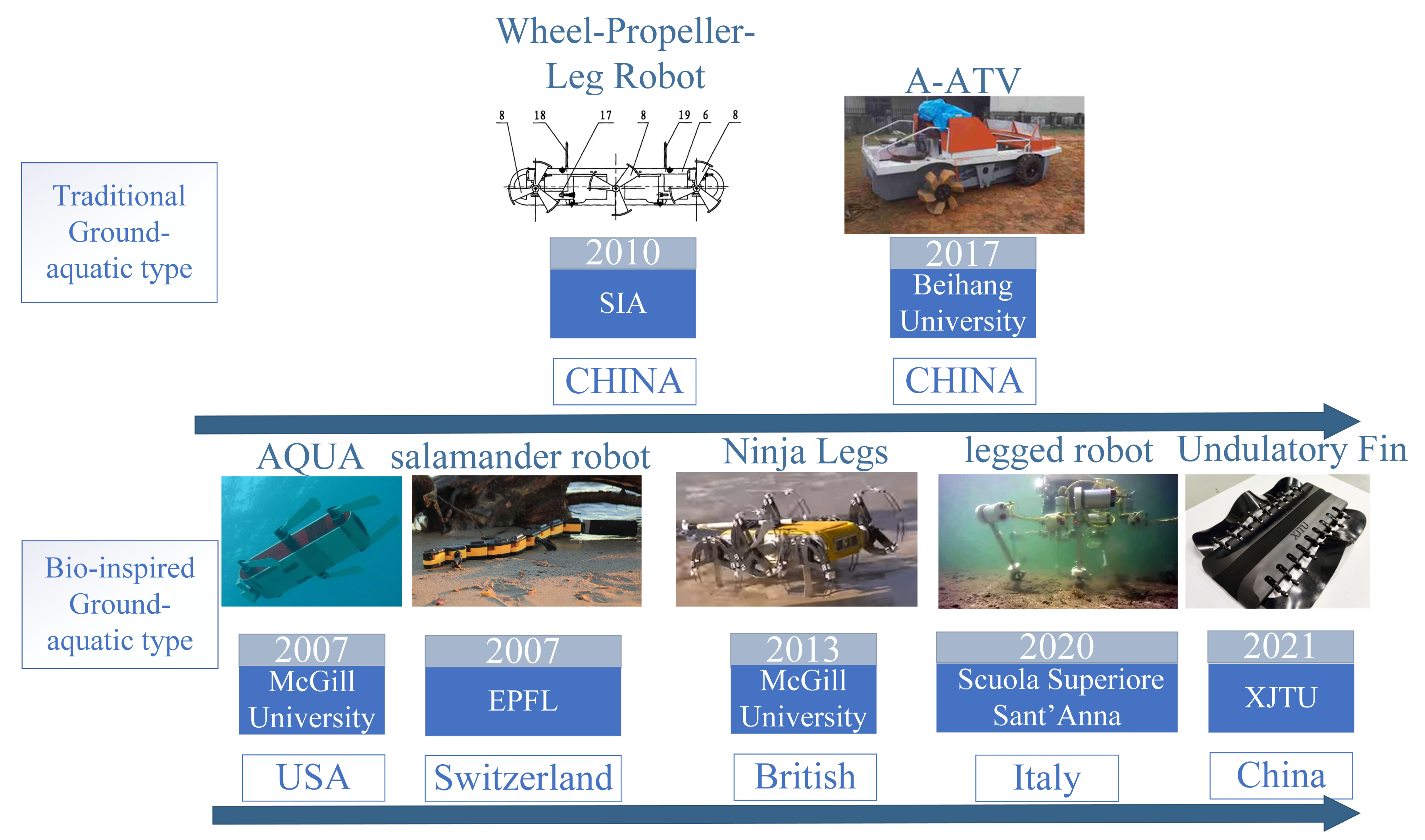
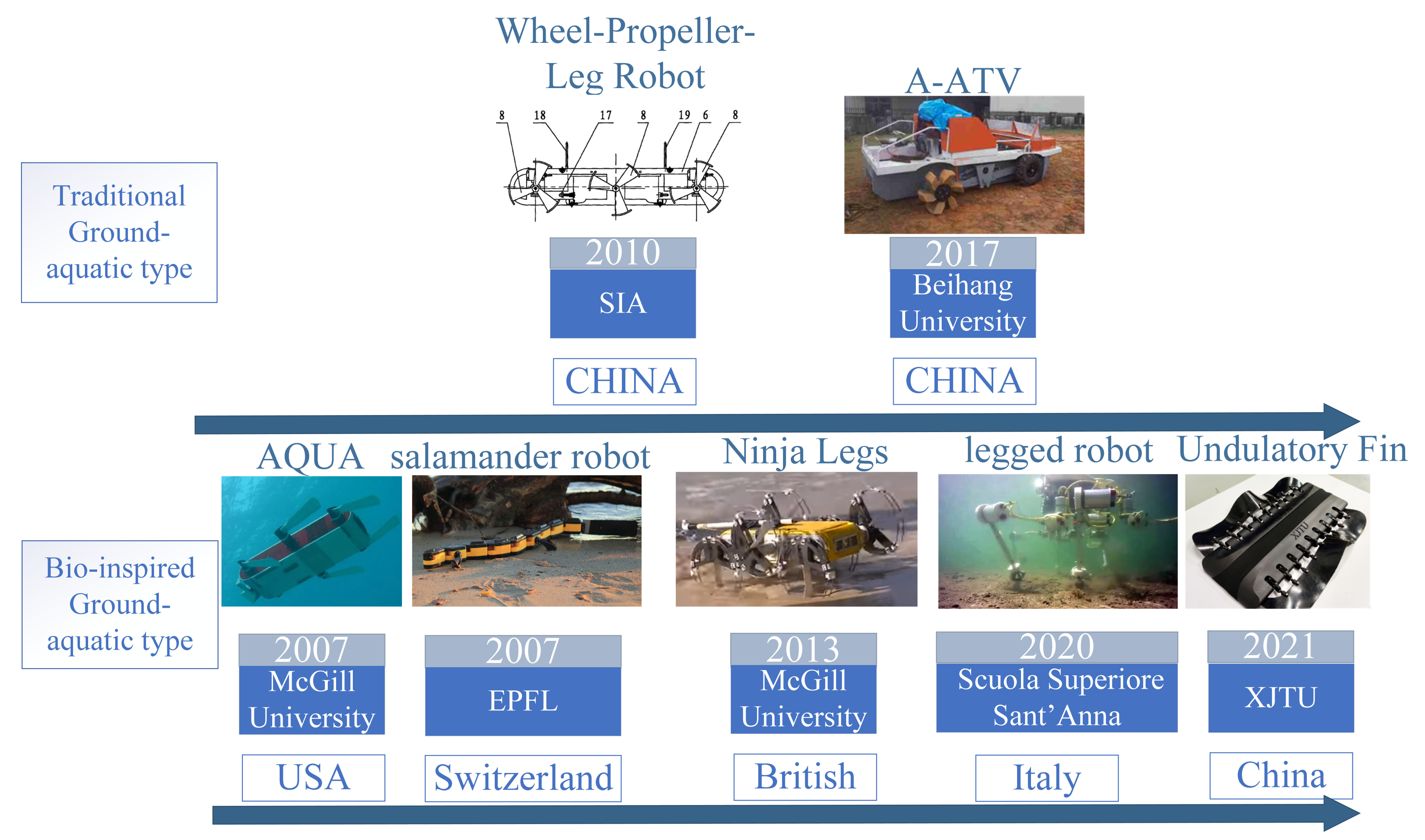
| Ground-aquatic | Traditional [215] | More stable and reliable in locomotion on land [215]. | Low efficient in water and not flexible in turning [215]. |
| Bio-inspied: Multi-foot [216,217,218,219,220] | Redesign of a legged robot for amphibious environment [216,219]; Overcoming the weakness in swimming thrust [217]; Huge in size for complex mission [218]; | The feasibility requires further verification [220]; Poor thrust in liquid [216]; Flippers unsuitable for terrestrial operations [217]. | |
| Bio-inspied: Fin [221,224] | Combination of the spherical robot and fins [221]; A novel simple undulatory fin actuator that operates both on land and in water, with high adaptability and robustness [224]. | Lack of experiments to determine coefficients in the empirical equations, so as to obtain a more precise mathematical model [221]; Inefficiency on land [224]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Li, W.; Wang, Z.; Zhu, Y.; He, Q.; Guan, X.; Dai, G.; Yuan, D.; Li, A.; Cui, W.; et al. Recent Progress in Modeling and Control of Bio-Inspired Fish Robots. J. Mar. Sci. Eng. 2022, 10, 773. https://doi.org/10.3390/jmse10060773
Sun B, Li W, Wang Z, Zhu Y, He Q, Guan X, Dai G, Yuan D, Li A, Cui W, et al. Recent Progress in Modeling and Control of Bio-Inspired Fish Robots. Journal of Marine Science and Engineering. 2022; 10(6):773. https://doi.org/10.3390/jmse10060773
Chicago/Turabian StyleSun, Boai, Weikun Li, Zhangyuan Wang, Yunpeng Zhu, Qu He, Xinyan Guan, Guangmin Dai, Dehan Yuan, Ang Li, Weicheng Cui, and et al. 2022. "Recent Progress in Modeling and Control of Bio-Inspired Fish Robots" Journal of Marine Science and Engineering 10, no. 6: 773. https://doi.org/10.3390/jmse10060773
APA StyleSun, B., Li, W., Wang, Z., Zhu, Y., He, Q., Guan, X., Dai, G., Yuan, D., Li, A., Cui, W., & Fan, D. (2022). Recent Progress in Modeling and Control of Bio-Inspired Fish Robots. Journal of Marine Science and Engineering, 10(6), 773. https://doi.org/10.3390/jmse10060773