1. Introduction
Thanks to the rapid development of the artificial intelligence and 5G technology, autonomous ships will become one of the key transportation vehicles in the future [
1,
2,
3]. Nowadays, several companies and organizations have performed research on MASS. The vehicle ferry Falco successfully navigated autonomously during its voyage between Parainen and Nauvo, and its return journey was conducted under remote control [
4]. Wärtsilä successfully tested such innovative technology into a voyage, during which a vessel was automatically controlled by a software, while manual intervention and control was still possible at any time [
5]. YARA and Kongsberg are building a ship named “YARA Birkeland”, which will be the world’s first fully electric and autonomous container vessel upon completion [
6]. DNV GL built a 1:20 scale model of MASS to investigate sensor fusion and collision avoidance [
7]. The AAWA project aimed to produce the preliminary specifications for the next generation of advanced ship solutions [
8]. Finally, the MUNIN research project developed a technical concept for the operation of an unmanned merchant ship and assessed its technical, economic and legal feasibility [
9]. In order to clarify the definition of autonomous ships, the International Maritime Organization (IMO) defines autonomous ships as maritime autonomous surface ships (MASS). MASS is classified into four degrees according to their autonomy level, as follows [
10,
11]. Note that, during the navigation of MASS, the MASS can change the autonomy level according to the scenario:
Autonomy level I: Ship with automated processes and decision support: Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated;
Autonomy level II: Remotely controlled ship with seafarers on board: The ship is controlled and operated from another location, but seafarers are on board;
Autonomy level III: Remotely controlled ship without seafarers on board: The ship is controlled and operated from another location. There are no seafarers on board;
Autonomy level IV: Fully autonomous ship: The operating system of the ship is able to make decisions and determine actions by itself.
The safety of MASS will become a key issue for autonomous ship operations. MASS should have the desired level of safety, i.e., at least the same safety level as conventional ships [
12]. Researchers believe that, compared to conventional ships, MASS are more economical and safer due to the reduction in crew on board [
13,
14]. Moreover, changed technologies, systems and procedures also bring new influence factors [
15,
16,
17]. Thus, there is an urgent need for a risk assessment of MASS to assist MASS design.
Maritime risk assessments are considered a hotspot for MASS [
18,
19,
20]. Due to complexity and novelty of MASS, several studies were performed for hazard identification, which is the basis for risk assessment. Fan et al. proposed a framework for the identification of factors that influence the navigational risk of remotely controlled MASS without crew on board [
21]. It classifies a total of 55 influence factors into ship-related, human-related, environment-related and technology-related factors. More in detail, failure of onboard equipment may result in the degradation or failure of functions related to propulsion. At the same time, the results show that the majority of these influence factors are related to human error. Kretschmann et al. [
22] found 23 identified hazards with acceptable risk based on a formal safety assessment (FSA). These hazards are related to various influence factors such as weather, equipment and cyber security. Human errors may be related to remote monitoring, control and maintenance. At the same time, this study shows that a failure of the power and propulsion system will lead to unacceptable consequences. Wróbel et al. [
19] reviewed a hundred maritime accident reports, analyzing various safety hazards that lead to accidents for conventional ships based on what-if and human factors analysis and classification system for marine accident (HFACS-MA) methods, and considering the impact of these safety hazards on MASS. The results show the existence of the human factor in unmanned systems’ operation, as long as people are involved in operation. In summary, almost all studies on MASS hazard identification mentioned the complexity and diversity of MASS influencing factors, as well as the significant influence of mechanical failure and human error.
Based on hazard identification, some studies have been conducted to analyze equipment failure and human error. In relation to the human error in SCC, Ramos et al. [
23] divided the possible human error process into four stages, and established an event tree model of the MASS. Moreover, they classified the influencing factors, describing their differences across various human factor reliability analysis methods and the shortcomings of the current behavior influencing factor set, simulating the human–machine interaction process and proposing an avoidance based on hierarchical task analysis. Man et al. [
24] invited six participants to conduct a scenario-based simulation as proposed operators in the SCC. Their conclusions suggest that human factor issues, such as psychophysical and perceptual limitations of operators, decision-making latencies and automation bias, may remain in systems assembled by assumed reliable technological components. Zhang et al. [
11] presented a model based on the Technique for Human Error Rate Prediction (THERP) and on Bayesian Network, which can depict the causal relationship focused on human–autonomy collaboration and perform a quantitative assessment. Unlike for human errors, research on equipment failure focuses mainly on power and propulsion systems. Bolbot et al. [
25] analyzed the hazards related to the electric propulsion system based on the System theoretic process analysis (STPA) method. In addition, Bolbot et al. [
26] combined event tree analysis (ETA), fault tree and STPA method to analyze a simplified diesel electric propulsion system and identify the hazardous scenarios leading to a blackout. Wang et al. [
27] determined the weakness of the ship power system and put forward a design of the ship power plant. These studies provided a reference for MASS designers in case of human error or equipment failure. However, they overlooked the influence of individual factors on the safety of the entire MASS, and often neglected the mutual influence of different factors.
The hazard scenario of MASS usually gradually evolves from a hazard event. Different outputs of safety barriers in this process will lead to different end states. The interaction among influence factors needs to be taken into consideration in this complex process [
28]. Thieme et al. [
29] formulated nine criteria and used them to assess 64 relevant ship risk models since 2005. The results show that none of them are suitable to be directly used for MASS risk assessment. In fact, MASS risk assessment should comprehensively include various influence factors, instead of only analyzing specific factors. Accordingly, new methods have been applied for MASS risk assessment. The STPA method has been applied to MASS, as it can analyze the interactions between its components. Valdez Banda et al. [
30] applied the STPA to analyze the safety hazards in the foreseen functioning of two concepts of autonomous ferries operating in urban waterways in, and near, the city of Turku in Finland. Employing the STPA, a safety-controlled structure and hazard list has been created for the system to ensure that remotely controlled ships do not have a negative impact on maritime safety [
18]. Wróbel et al. [
31] applied the STPA to identify the hazards, formulate hazard mitigation and improve the safety performance of autonomous ships. In addition, Utne et al. [
16] proposed a framework combining STPA and Bayesian Belief Networks to establish an online risk model for autonomous ships. In parallel, Ramos et al. [
32] proposed the human–system interaction in autonomy (H-SIA) method, which consists of an event sequence diagram (ESD) and concurrent task analysis (CoTA), to analyze the system as a whole and focus on the interactions between sub-systems. At the same time, Ramos et al. [
28] extended the H-SIA to include the paths to failure through the Fault Tree (FT). However, these approaches can only be used in qualitative analyses, and are not suitable to perform quantitative analyses. The relationship of potential hazards of MASS can be easily described by these qualitative methods. However, the failure probability and sensitivity of potential hazards cannot be obtained. The results have limited contribution to the safety design of MASS.
Since MASS is still in the experimental stage and concept stage rather than the operation stage, there are insufficient data to quantitatively analyze the risk of MASS. A preliminary risk analysis should take place to evaluate the ability of the MASS to operate safely and reliably during the concept and experimental stages [
12]. In this study, we want to develop a model which can perform a preliminary hazard analysis of MASS. For the function during concept stage, the historical data such as failure rate are used for qualitative analysis. For the function during the experimental stage, the experimental data of the MASS model are used to develop the quantitative model. This result will be used to further improve the performance of MASS experiment. At the same time, the data can assist in judging whether these concepts of MASS are suitable or not and help develop the function which is still in the concept stage.
The shift from conventional ships to autonomous ships is a gradual process [
21]. Compared with conventional ships, the MASS will be equipped with an autonomous system (AS) that may help or replace human decision-making and action. At the highest level of autonomy, MASS can be controlled by AS completely. Given the current development of MASS technology, in the near future, MASS will have a constrained autonomy, and their operation will be supervised or controlled by a shore control center (SCC) [
33]. Autonomy level III MASS will be an important stage with the participation of AS and operators in SCC. According to the elaboration of autonomy level III, MASS are equipped with AS, an advanced sensor module, a SCC, a satellite communication equipment, alarm devices, other facilities and without anyone onboard. Various sensors will provide sufficient data for AS system and SCC to identify the navigation status and environment. The AS system can control navigation according to the surrounding environment and ship condition; in case of hazardous events, it will propose strategies to guarantee the safety of MASS. At the same, the operator in SCC will supervise the operation of MASS, including the operating environment, decision proposed by AS, etc. The remote operator has the highest right to take over the control of MASS at any time. In case the AS system cannot propose effective measures or a situation develops in a particularly difficult direction, the SCC can take over the control of the MASS and dispatch a professional team to deal with problems [
34]. Above all, the autonomy level III MASS is a suitable object to conduct a preliminary hazards analysis for MASS.
The hybrid causal logic (HCL) methodology provides a vehicle for the identification and communication of cause–effect relations including those associated with human, organization and system hardware and software, and the physical and regulatory environment of the system [
35]. The HCL method uses ESD as the first layer to describe system behavior, and then provides a more detailed picture of the contributing causes by using FTs. Fault tree analysis is the one of the popular techniques used for reliability studies for a complicated system [
36]. Fault trees are widely used in mechanical systems with obvious structure and causal logic such as the aviation industry and offshore systems. Mohaghegh et al. [
37] applied the HCL method to include the organizational roots of risk. Groth et al. [
38] introduced a software platform for the HCL method and applied it to analyze a type of aviation accidents. Røed et al. [
39] discussed the applicability of HCL to the offshore industry and its relationships with the barrier and operational risk analysis project (BORA). Sklet et al. [
40] applied the HCL to analyze the installation-specific factors with respect to technical systems, operational conditions, and human and organizational factors. Thus, the HCL method is a suitable tool to analyze MASS, as it includes various influence factors.
Based on these considerations, this article hopes to introduce the HCL method into MASS to assist the early design of MASS. Taking contact hazards as an example, this paper applies the experimental MASS model and historical data to conduct hazard analysis on MASS. The ESD was applied to define the hazard scenario, focusing on the interaction between AS and operators in the SCC. For non-human-related events (such as mechanical failure) that can be decomposed into the equipment level, we applied the FT to develop a branch model to analyze in detail the influence factors. The concept of the mechanical system of MASS and the failure data of conventional ships were used to conduct a preliminary analysis. As for human- and organization-related events, due to their uncertainties, we applied the Bayesian Belief Network (BBN) to analyze in detail the influence factors based on the experimental statistics This process was applied to demonstrate a case study of a test ship, equipped with an autonomous navigation mode and a remote navigation mode in Wuhan and Nanjing, China.
The rest of this paper is organized as follows.
Section 2 describes the HCL methodology used to develop the model.
Section 3 presents the MASS hazard scenarios.
Section 4 introduces the quantitative case study of contact scenario. Finally,
Section 5 presents the conclusions of this study and the future work.
2. Methodology
HCL methodology is a powerful modeling tool for developing hazards scenarios and search the more detail potential hazards.
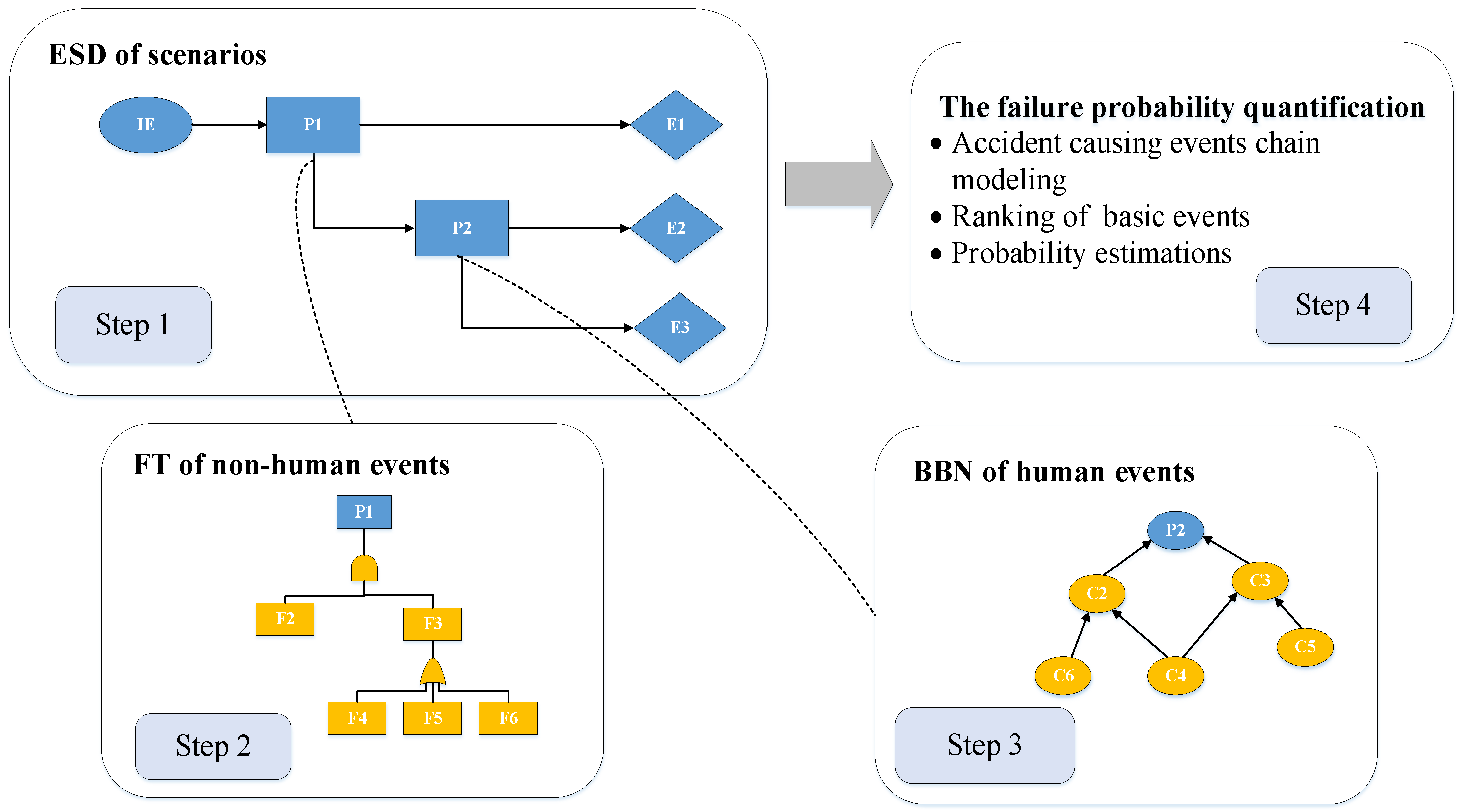
Figure 1 presents the main framework and the flowchart of the HCL method. The application of HCL can be divided into 4 steps and described in detail below.
Step 1: Development of a MASS hazard scenario using ESD. ESDs are used to define the system hazard scenarios. The ESD presents a temporal sequence of events, from an initiating event to various end states. The initiating event (IE) is commonly a hazardous event or a source of risk. Once a hazardous event occurs, some safety barriers, regarded as pivotal events in ESD, should be adopted to prevent or mitigate the hazard. The output of safety barriers (i.e., normal or failure of operation) determines whether or not the hazardous event evolves into an accident. Different pivotal events and their output will lead to different end states, such as safe or accident states. In order to determine the probability of each end state, the probability of each pivotal event output (i.e., normal or failure of operation) must be obtained. According to the characteristics of pivotal events, their detailed influence factors can be analyzed using FT and BBN. In this study, the equipment events were analyzed using FT, as shown in Step 2. The events involving human factors were analyzed using BBN, as shown in Step 3.
Step 2: Analysis of mechanical events using FT. The FT is used to develop a branch model to quantitative analyze mechanical events in ESD. Fault tree analysis is the one of popular techniques used for reliability studies for a complicated system. The system failure event is regarded as top event. The subsystem failure events which may cause the top events are identified and linked to top event through logical connective function (such as AND/OR gate) [
36]. Fault trees are widely used in mechanical systems with obvious structure and causal logic such as the aviation industry and offshore systems. The quantitative analysis of the fault tree first needs to convert the logical structure established by it into an equivalent probability expression. Once the failure rate and operation time are obtained, the failure probability of the basic event can be calculated. Thus, according to the equivalent probability expression, the failure probability of the top event can also be obtained.
Step 3: Analysis of events related to human factors using BBN. Unlike for mechanical events, the events related to human factors are non-deterministic and uncertain, and can be effectively analyzed using BBN. The BBN network consists of nodes and directed arcs. The events involving human factors in ESD are regarded as target nodes in the BBN network. The detailed influence factors of the events involving human factors are regarded as sub-nodes. The nodes are divided into various states according to their characteristics and requirements, while the arcs between nodes represent the direct influences. Similar to FT, the BBN also allows us to quantify the probability of events in the ESD when the probability of root nodes and conditional probability table are obtained (see further details in
Section 3.3).
Step 4: Quantification of the failure probability. The probability of events in ESD are calculated in Steps 2 and 3. This way, we obtain the occurrence of various end states by logics. At the same time, the hazard scenario can be expressed by the accident-causing events. These chains of events can be ranked according to their probabilities. In addition, important measures are adopted to provide information about the criticality of basic events according to their contribution to the overall system performance (see
Section 4 for further details).
3. HCL Model for the Hazard Scenario for Mass
The preliminary hazards analysis for MASS should at least cover the relevant hazards such as collision/contact, grounding, unable to detect, etc. [
12,
41,
42,
43]. In this section, we take contact with foreign objects/obstacles (non-detected and detected) as an example. Contact refers to ships striking or being struck by an external object include floating object, fixed object or flying object. According to the definition of the contact scenario, several experiments were carried out in the Tangxun Lake in Wuhan and in the Qinhuai River in Nanjing, China [
44]. Through the experiments and historical database, the hazard model for contact scenarios of MASS is developed.
3.1. Develop a MASS Hazard Scenario Using ESD
It is important to understand the entire process of MASS contact scenarios. Once an external object occurs, the AS and the operators in the SCC have a responsibility to detect it and avoid [
28]. The MASS will strike or be struck by an external object if the course/speed of the vessels does not change.
To assist in the analysis of the contact scenarios for MASS, the ESD is used to develop a model.
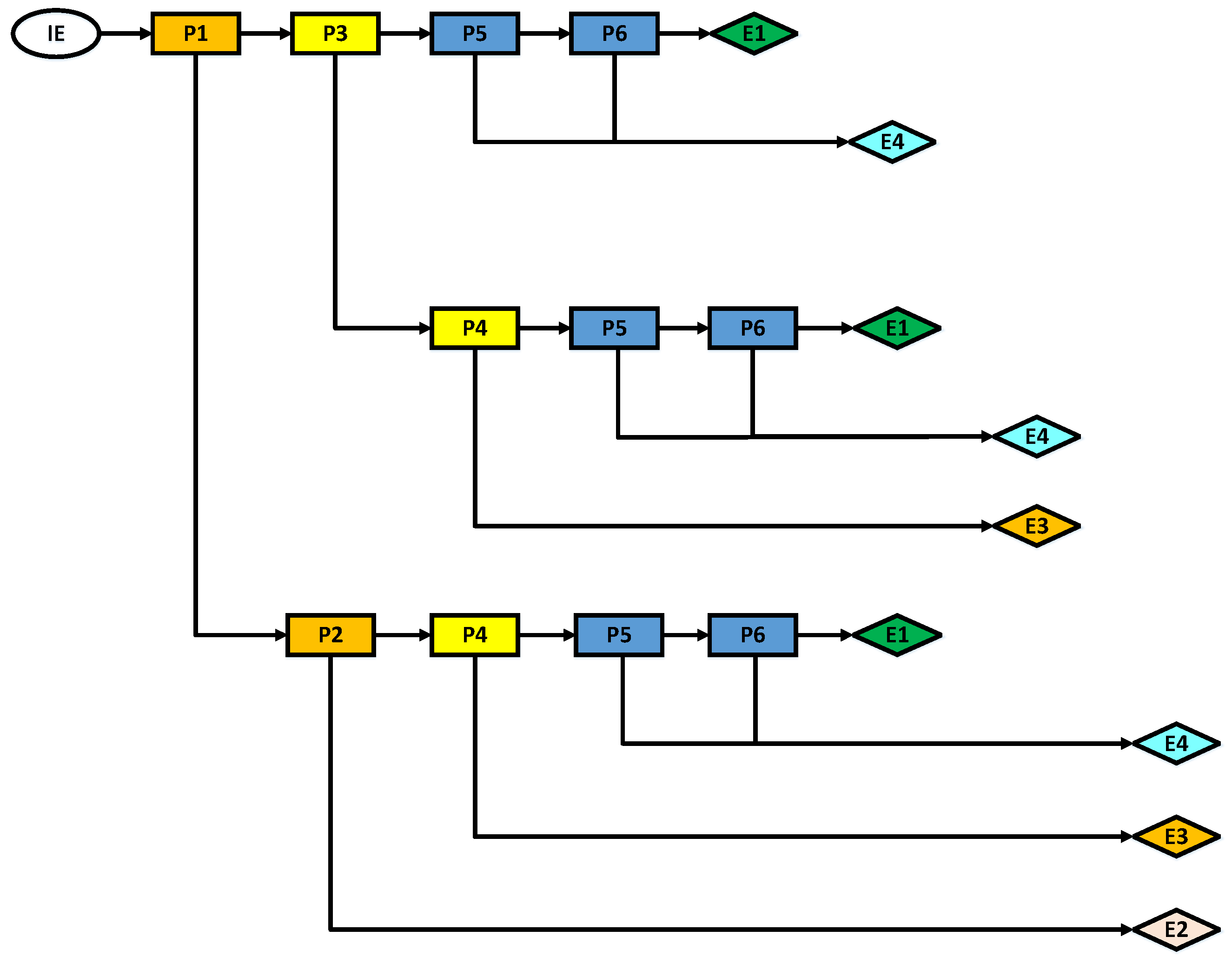
IE usually refers to potentially hazardous events that may lead to accidents. In the contact scenario, the initiating event (IE) is commonly an external object appears on the planned sailing route. For a better description, several pivotal events and end states of the contact scenario are classified into three stages: (1) hazardous event perception; (2) decision-making; and (3) execution based on the experimental situation combined with experts’ knowledge [
21,
28,
45]. They are described as follows:
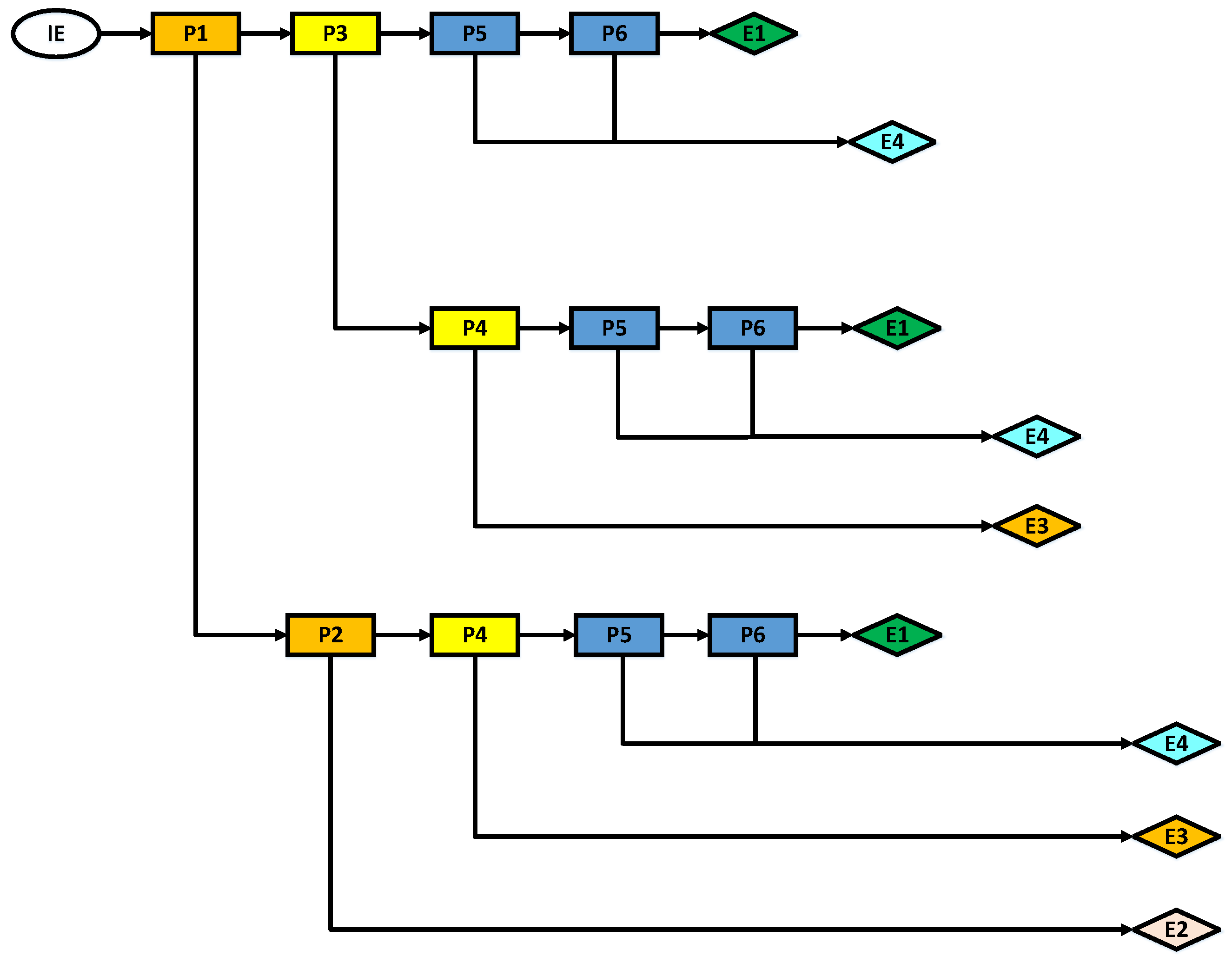
λPerception stage: In this stage, the external object is perceived by the MASS; accordingly, information should be acquired based on sensors and human perceptions. Through the analysis of information, the MASS can detect the external object in two ways [
12]. The first way mainly relies on sensing devices and AS and is labeled as ‘detection by AS’ (P1). Accordingly, the MASS is equipped with various sensing devices that ensure a timely perception of hazardous events. The second way is labeled as ‘detection by SCC’ (P2), where operators in SCC should monitor the MASS in case the external object is not perceived by the sensing devices. A failure in the perception stage will directly lead to an accident.
λDecision-making stage: In this stage, an agent (either the AS or the operators in the SCC) should propose an effective strategy to prevent contact with external objects according to the data and information gathered at the perception stage. This covers situation assessment, diagnosis and response planning [
28]. In this stage, the AS should control the ship and propose a strategy to avoid the external events, an occurrence labeled as ‘control by AS’ (P3). If the AS cannot propose an effective strategy, the operators in the SCC should take over the control of MASS, an occurrence labeled as ‘remote control by the SCC’ (P4).
λExecution stage: In this stage, the MASS should successfully execute the strategy selected at the decision-making stage. More in detail, the actuators will operate a control system to change the course/speed according to the strategy [
12]. In this study, the execution system mainly includes the ‘steering system’ (P5) and the ‘power and propulsion system’ (P6).
The normality or failure of operation of pivotal events will lead to different end states. In this study, four end states were determined. In the ‘normal navigation’ (E1) end state, the MASS successfully avoid the objects and has the ability to continue navigation. In ’accident due to perception failure’ (E2), the MASS does not recognize external objects and struck with them. In ’accident due to decision-making failure’ (E3), the MASS does not propose effective strategies to avoid the external object. Finally, in ’accident due to execution failure’ (E4), the MASS does not adjust the speed and course lead in a timely manner due to a mechanical failure resulting in a contact accident.
The description of the pivotal events and of the end states in the contact scenario is presented in
Table 1. At the same time, the ESD model for the MASS contact scenario was elaborated and is shown in
Figure 2.
3.2. Analysis of Mechanical Events Using FT
In order to prevent the contact accident, MASS needs to adjust the course and speed which mainly relied on steer system and power and propulsion system. In this study, we developed a model for the MASS power and propulsion system using the FT method as an example.
Since there is no MASS in operation, its mechanical system structure and failure data cannot be obtained. In the current study, the researchers usually use the failure data of conventional ships to continue the research about the MASS [
49]. Thus, in this section, we will develop a FT for the mechanical events of MASS based on the MUNIN report and DNV GL guideline.
In conventional ships, machinery problems have a very high frequency of causing minor incidents which, however, will be more severe in MASS without maintenance [
22]. The power and propulsion system of a conventional ship, which includes the main engine, the propeller and the auxiliary system, is considered to be the cause of major ship technical failures. Thus, the normal operation of the mechanical system is key for MASS navigation. There are different opinions about the MASS power and propulsion system. Some projects, such as the AAWA project and the ReVolt project, selected batteries as power source because they have a good efficiency and can ensure zero emissions [
8]. In the MUNIN project, the diesel engine propulsion line was selected as the propulsion system [
22]. Although the forms of power and propulsion are different, it is commonly accepted that MASS should be purposely built with redundant energy propulsion systems. In this study, we adopted the requirement that MASS should be arranged with a minimum of two independent propulsion lines, as proposed by DNV GL. In parallel, each propulsion line should have a sufficient capacity to meet the specifications for normal operation [
12]. This arrangement has two advantages: (i) the two propulsion lines are redundant; and (ii) two independent propulsion lines can prevent common cause failures. In this study, considering that the energy provided by the battery is not enough to support long-term sailing, the diesel electric propulsion was selected as the power and propulsion system. The equipment in the power and propulsion system is shown in
Table 2.
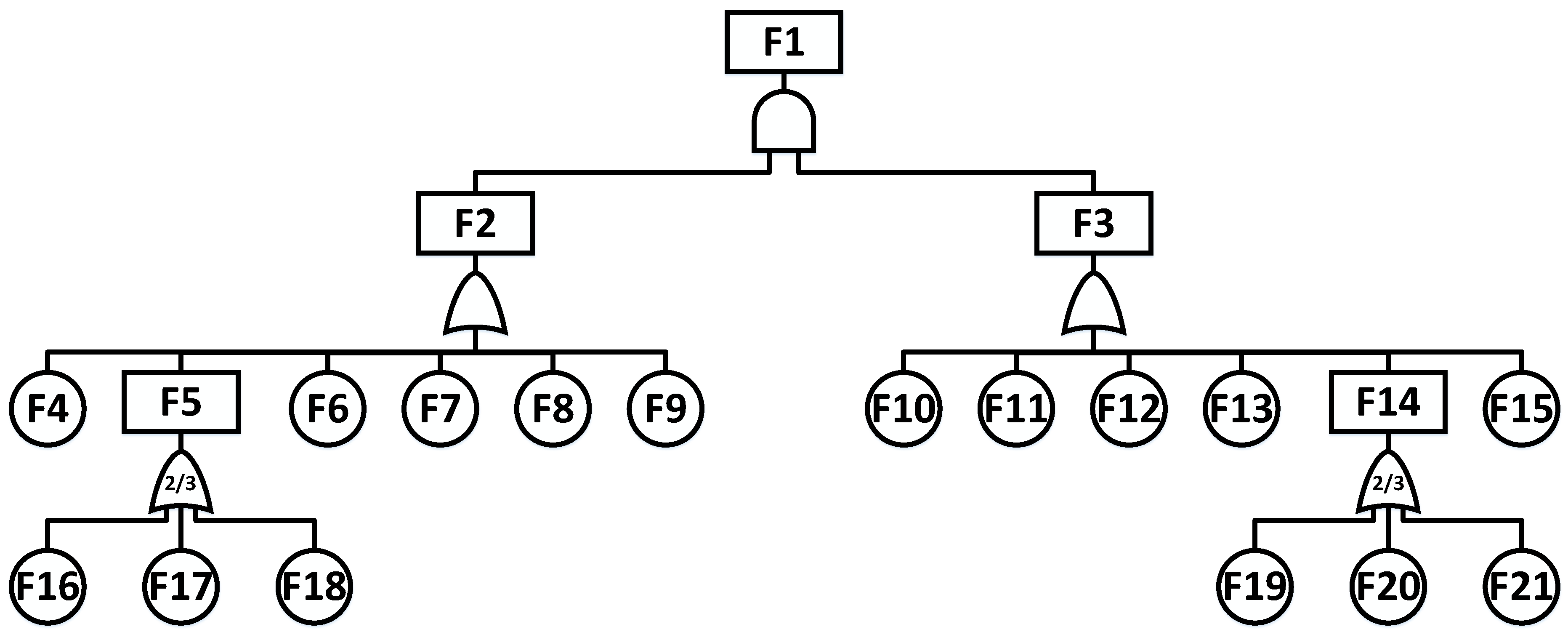
According to the FT logic and to the equipment of diesel electric propulsion, we established the FT of diesel electric propulsion systems for MASS. The failure of operation of the ‘power and propulsion system’ (P6) was regarded as the top event and was labeled as F1. A failure of both the first diesel electric propulsion line (F2) and the second diesel electric propulsion line (F3) will lead to propulsion loss (F1). The second diesel electric propulsion line (F2) has the same arrangement as, and is independent from, the first diesel electric propulsion line (F1). We took the first propulsion line as an example. The single diesel electric propulsion line can be decomposed into three elements: power plant, distribution and loads. The power plant (F5) includes three diesel generators (F16, F17 and F18), two of which can provide sufficient power. Multiple diesel generator sets feed a fixed-frequency high-voltage electrical bus (F6), upon which the distribution depends to dispatch power according to the load. In this section, we only consider the load of the propulsion. This bus feeds the electrical propulsion motor drive, in most cases through a transformer (F7). The electric propulsion motor (F9) drives a frequency converter (F8) to control the shaft line speed and the propeller (F10) to provide propulsion to the MASS [
51]. The propulsion system failure was modeled by using FT, as shown in
Figure 3. The nodes in the FT are shown in
Table 3.
3.3. Analysis of Events Related to Human Factors Using BBN
Although autonomy level III MASS have no crew on board, the human error in the SCC can still lead to contact, especially in the remote driving mode. In this step, we used BBN to develop a branch model for the ‘remote control by the SCC’ (P4), which was defined as the target node of the BBN model (C1). The influence of the detailed variables on the ‘remote control by the SCC’ (C1) is mainly reflected in the form of the various nodes in the network. We first investigate the historical literature to obtain potential influence factors with their associated definitions and descriptions. After that, develop and apply contact scenarios in Tanxun Lake and Qinhuai River, and remotely control MASS ships to conduct contact avoidance experiments. After experimentation and expert judgment, 15 influence factors that influence the ‘remote control by SCC’ (C1) are regarded as sub-nodes, as shown in
Table 4. The process employed is as follows:
- (1)
Determination of BBN nodes
The ‘remote control by the SCC’ (C1) is influenced not only by the operators’ performance, but also by the ship condition and operating environment. Different from the ‘remote control by SCC’ (C1), which is a binary node, these influence factors have multiple states. The sub-nodes are classified into multiple states according to the criteria presented in
Table 5.
- (2)
Analysis of BBN nodes
The label C1 refers to a situation where the operators in the SCC remotely control the ship and handle the hazardous events. This node is mainly related to three aspects: ‘operators’ performance’ (C2); ‘ship’s condition’ (C3); and ‘operating environment’ (C4).
The label C2 refers to the operators’ performance during the remote control of MASS in the contact scenario. During the remote driving mode, the SCC will assign a group of people including a supervisor, an engineer and a captain to remotely drive the MASS. After a long work schedule, the operators may be in a state of ‘fatigue’ (C5). ‘Situational awareness’ (C6) refers to operators’ awareness of the current emergency situation of MASS. ‘experience’ (C7), ‘communication and collaboration’ (C8) and ‘ship’s feedback (C9) influence the ‘situational awareness’ (C6). In terms of ‘experience’ (C7), the crew group should not only master the ability of remote driving, but also have experience in handling various hazardous events. ‘Communication and collaboration’ (C8) means that the crew group needs to exchange information and collaborate to propose effective strategies.
The SCC operators cannot handle hazardous events without the support of ship’s function. The label C3 refers to whether or not the ship can capture and deliver the necessary information needed by the SCC, which depends on ‘software performance’ (C10), ‘SCC’s feedback’ (C11) and ‘operating environment’ (C4). ‘Ship’s feedback’ (C9) and ‘SCC’s feedback’ (C11) refer to the quality of the data and information transferred between the ship and the SCC, which depends on ‘software performance’ (C10) and ‘communication quality’ (C12). In turn, ‘communication quality’ (C12) is related to ‘communication bandwidth’ (C13) and “operating environment” (C4), and determines the sufficient and timely delivery of information. In case of insufficient communication between the ship and the SCC, ‘software performance’ (C10) should give priority to providing the urgently needed information, which affects both the ‘ship’s feedback’ (C9) and ‘SCC’s feedback’ (C11).
The label C4 refers to the surrounding environment of MASS, it includes ‘weather conditions’ (C14) and ‘traffic density’ (C15), which will affect the difficulty of remote driving. After determining the nodes, and according to the relationship between them, a model of remote control error was developed, as shown in
Figure 4.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}