
Diagonal Denoising for Spatially Correlated Noise Based on Diagonalization Decorrelation in Underwater Radiated Noise Measurement


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
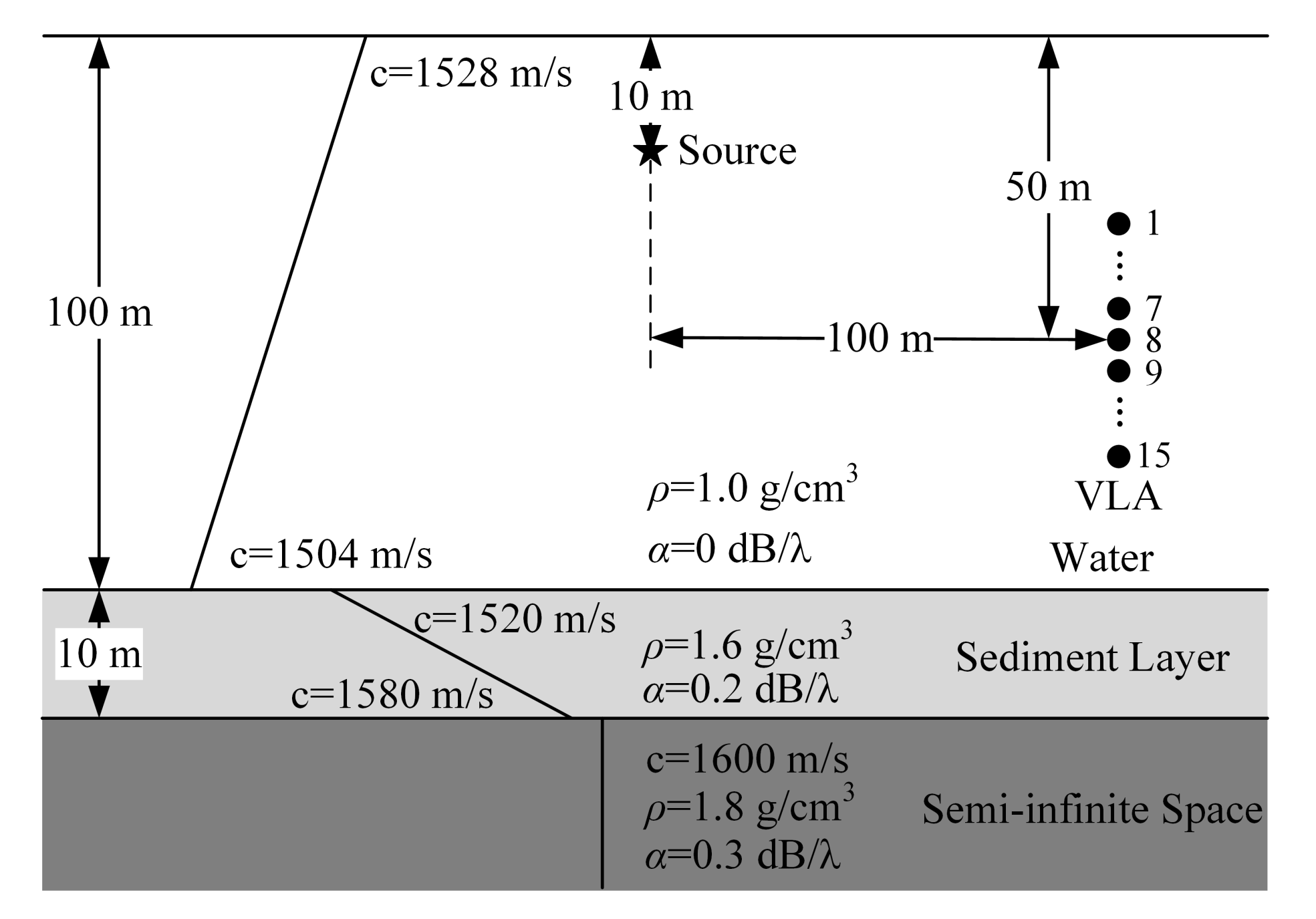
2. Radiated Noise Measurement Using a Vertical Linear Array
2.1. Data Model
2.2. Radiated Noise Measurement Based on Beamforming
3. Denoising Methods
3.1. Diagonal Denoising for Spatially Uncorrelated Noise
3.2. Diagonalization-Decorrelation-Based Diagonal Denoising for Spatially Correlated Noise
4. Simulations and Analysis
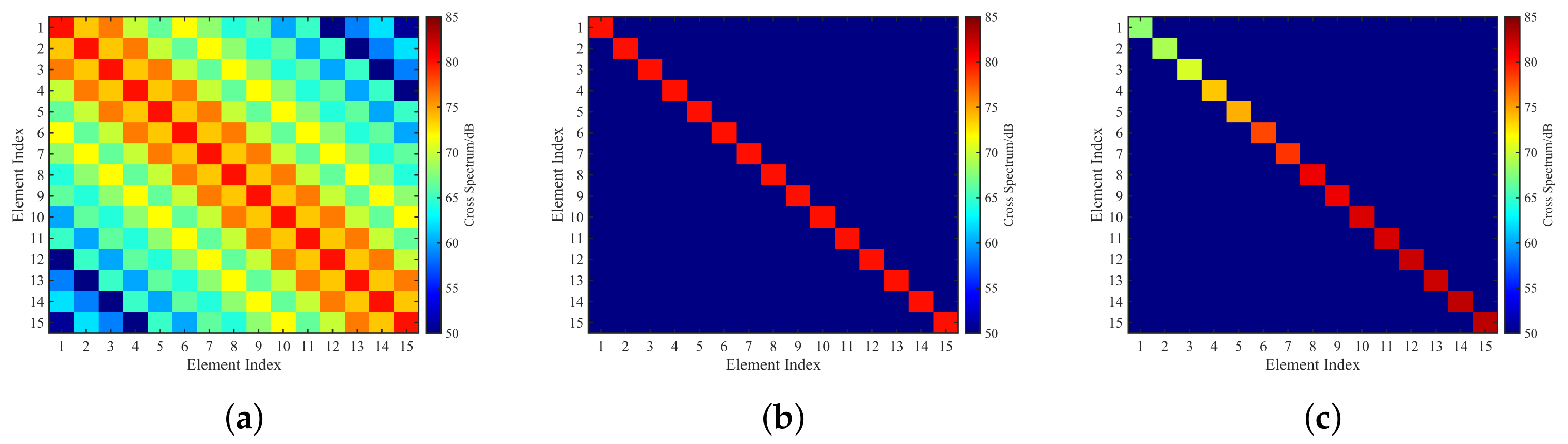
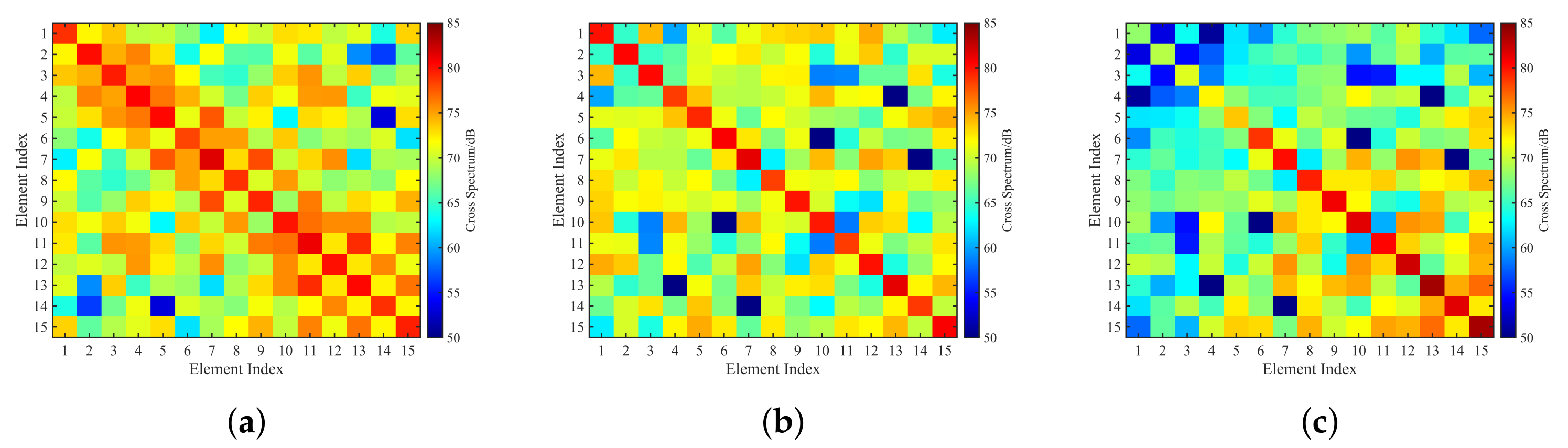
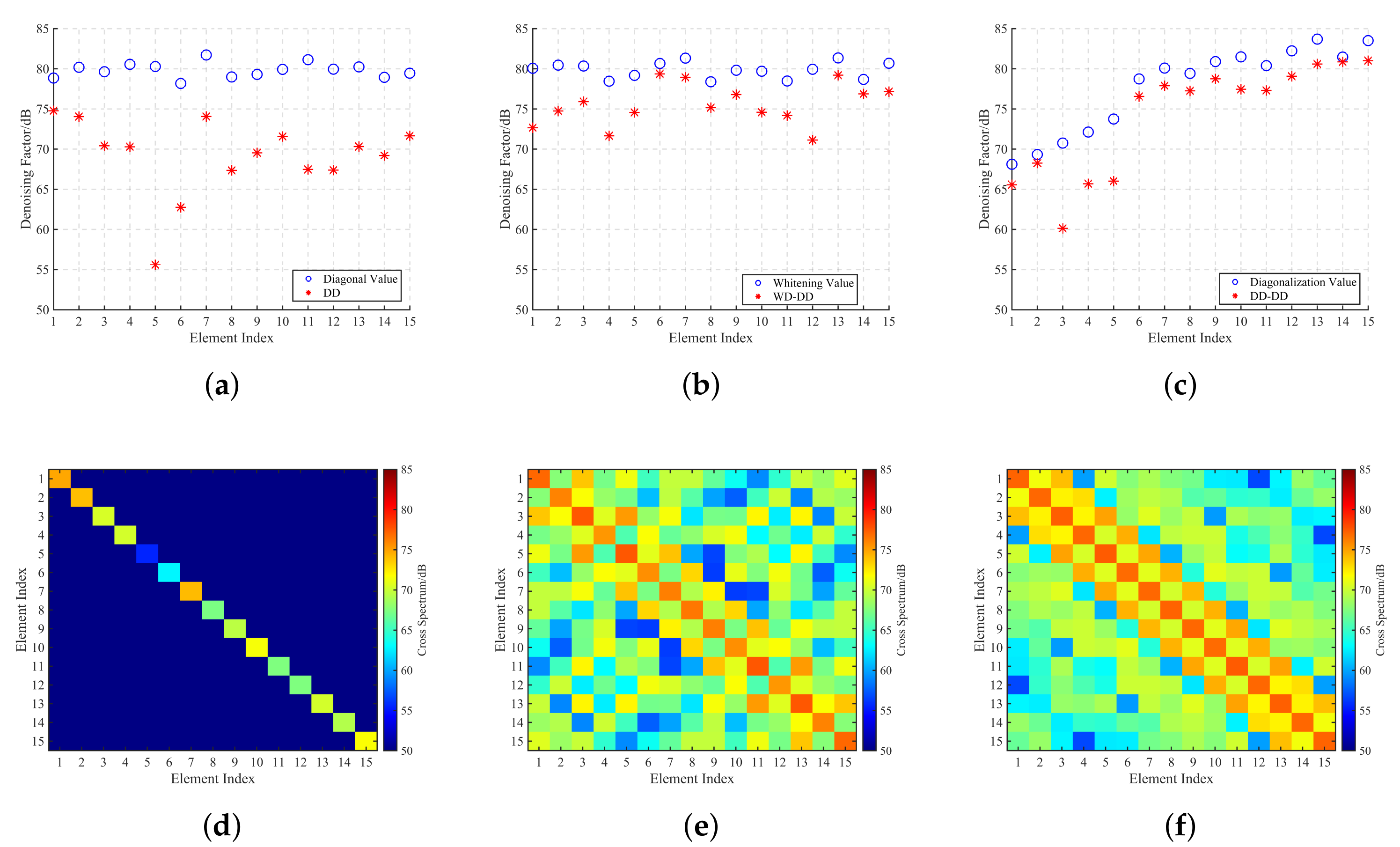
4.1. Noise Reduction Analysis for Spatially Correlated Noise
4.2. The Influence of Denoising on Underwater Radiated Noise Measurement
5. Experiment Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- ISO17208-1:2016; Underwater Acoustics—Quantities and Procedures for Description and Measurement of Underwater Sound from Ships—Part 1: Requirements for Precision Measurements in Deep Water Used for Comparison Purposes. ISO: Geneva, Switzerland, 2016.
- McCarthy, E. International Regulation of Underwater Sound: Establishing Rules and Standards to Address Ocean Noise Pollution; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- De Jong, C.; Ainslie, M.; Blacquière, G. Standard for Measurement and Monitoring of Underwater Noise, Part II: Procedures for Measuring Underwater Noise in Connection with Offshore wind Farm Licensing; Tno-dv 2011 c251; TNO: Hague, The Netherlands, 2011. [Google Scholar]
- Badino, A.; Borelli, D.; Gaggero, T.; Rizzuto, E.; Schenone, C. Normative framework for ship noise: Present and situation and future trends. Noise Control Eng. J. 2012, 60, 740–762. [Google Scholar] [CrossRef]
- Juretzek, C.; Schmidt, B.; Boethling, M. Turning Scientific Knowledge into Regulation: Effective Measures for Noise Mitigation of Pile Driving. J. Mar. Sci. Eng. 2021, 9, 819. [Google Scholar] [CrossRef]
- Brooker, A.; Humphrey, V. Measurement of radiated underwater noise from a small research vessel in shallow water. Ocean Eng. 2016, 120, 182–189. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Forland, T.N.; Johnsen, E.; Pedersen, G.; Dong, H. Measurements of underwater noise radiated by commercial ships at a cabled ocean observatory. Mar. Pollut. Bull. 2020, 153, 110948. [Google Scholar] [CrossRef]
- Parsons, M.J.G.; Erbe, C.; Meekan, M.G.; Parsons, S.K. A Review and Meta-Analysis of Underwater Noise Radiated by Small (<25 m Length) Vessels. J. Mar. Sci. Eng. 2021, 9, 827. [Google Scholar]
- Andrew, R.K.; Howe, B.M.; Mercer, J.A.; Dzieciuch, M.A. Ocean ambient sound: Comparing the 1960s with the 1990s for a receiver off the California coast. Acoust. Res. Lett. Online 2002, 3, 65–70. [Google Scholar] [CrossRef] [Green Version]
- McDonald, M.A.; Hildebrand, J.A.; Wiggins, S.M. Increases in deep ocean ambient noise in the Northeast Pacific west of San Nicolas Island, California. J. Acoust. Soc. Am. 2006, 120, 711–718. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fillinger, L.; Sutin, A.; Sedunov, A. Acoustic ship signature measurements by cross-correlation method. J. Acoust. Soc. Am. 2011, 129, 774–778. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.S.; Robinson, S.P.; Theobald, P.; Lepper, P.A.; Hayman, G.; Humphrey, V.F. Measurement of radiated ship noise. Proc. Meet. Acoust. 2013, 17, 070091. [Google Scholar]
- Humphrey, V.; Brooker, A.; Dambra, R.; Firenze, E. Variability of underwater radiated ship noise measured using two hydrophone arrays. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–10. [Google Scholar]
- Dinsenmeyer, A.; Antoni, J.; Leclere, Q.; Pereira, A. On the Denoising of Cross-Spectral Matrices for (Aero)Acoustic Applications; BeBeC: Berlin, Germany, 2018; pp. 1–12. [Google Scholar]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Amailland, S.; Thomas, J.H.; Pézerat, C.; Boucheron, R. Boundary layer noise subtraction in hydrodynamic tunnel using robust principal component analysis. J. Acoust. Soc. Am. 2018, 143, 2152–2163. [Google Scholar] [CrossRef] [PubMed]
- Jiang, G.; Sun, C.; Liu, X. Diagonal Denoising for Conventional Beamforming via Sparsity Optimization. IEEE Access 2020, 8, 11416–11425. [Google Scholar] [CrossRef]
- Hald, J. Removal of incoherent noise from an averaged cross-spectral matrix. J. Acoust. Soc. Am. 2017, 142, 846–854. [Google Scholar] [CrossRef] [PubMed]
- Kay, S.M. Fundamentals of Statistical Signal Processing; Prentice Hall PTR: Hoboken, NJ, USA, 1993. [Google Scholar]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Porter, M.B. The KRAKEN Normal Mode Program; Technical Report; Naval Research Lab: Washington, DC, USA, 1992. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx/ (accessed on 2 March 2022).
- Grant, M.; Boyd, S. Graph implementations for nonsmooth convex programs. In Recent Advances in Learning and Control; Springer: Berlin/Heidelberg, Germany, 2008; pp. 95–110. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis, 2nd ed.; Cambridge University Press: Cambridge, UK, 2013; Chapter 2–4. [Google Scholar]
- Kuperman, W.A.; Ingenito, F. Spatial correlation of surface generated noise in a stratified ocean. J. Acoust. Soc. Am. 1980, 67, 1988–1996. [Google Scholar] [CrossRef]
- Yang, T.C.; Yoo, K. Modeling the environmental influence on the vertical directionality of ambient noise in shallow water. J. Acoust. Soc. Am. 1997, 101, 2541–2554. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, G.; Sun, C.; Xie, L. Diagonal Denoising for Spatially Correlated Noise Based on Diagonalization Decorrelation in Underwater Radiated Noise Measurement. J. Mar. Sci. Eng. 2022, 10, 502. https://doi.org/10.3390/jmse10040502
Jiang G, Sun C, Xie L. Diagonal Denoising for Spatially Correlated Noise Based on Diagonalization Decorrelation in Underwater Radiated Noise Measurement. Journal of Marine Science and Engineering. 2022; 10(4):502. https://doi.org/10.3390/jmse10040502
Chicago/Turabian StyleJiang, Guoqing, Chao Sun, and Lei Xie. 2022. "Diagonal Denoising for Spatially Correlated Noise Based on Diagonalization Decorrelation in Underwater Radiated Noise Measurement" Journal of Marine Science and Engineering 10, no. 4: 502. https://doi.org/10.3390/jmse10040502
APA StyleJiang, G., Sun, C., & Xie, L. (2022). Diagonal Denoising for Spatially Correlated Noise Based on Diagonalization Decorrelation in Underwater Radiated Noise Measurement. Journal of Marine Science and Engineering, 10(4), 502. https://doi.org/10.3390/jmse10040502