
A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice



Abstract
:1. Introduction
1.1. Forms of Broken Ice
1.2. Interaction between a Ship and Broken Ice
1.3. Simulation of a Ship Advancing in Broken Ice
1.4. Scope of This Paper
2. Ship-Broken Ice Interaction
2.1. Energy Conservation
2.2. Ice Resistance of a Ship vs. Ice Loads on a Ship’s Local Structures
3. Review of Computational Simulation Methods
3.1. Ice Floe
3.2. Brash Ice
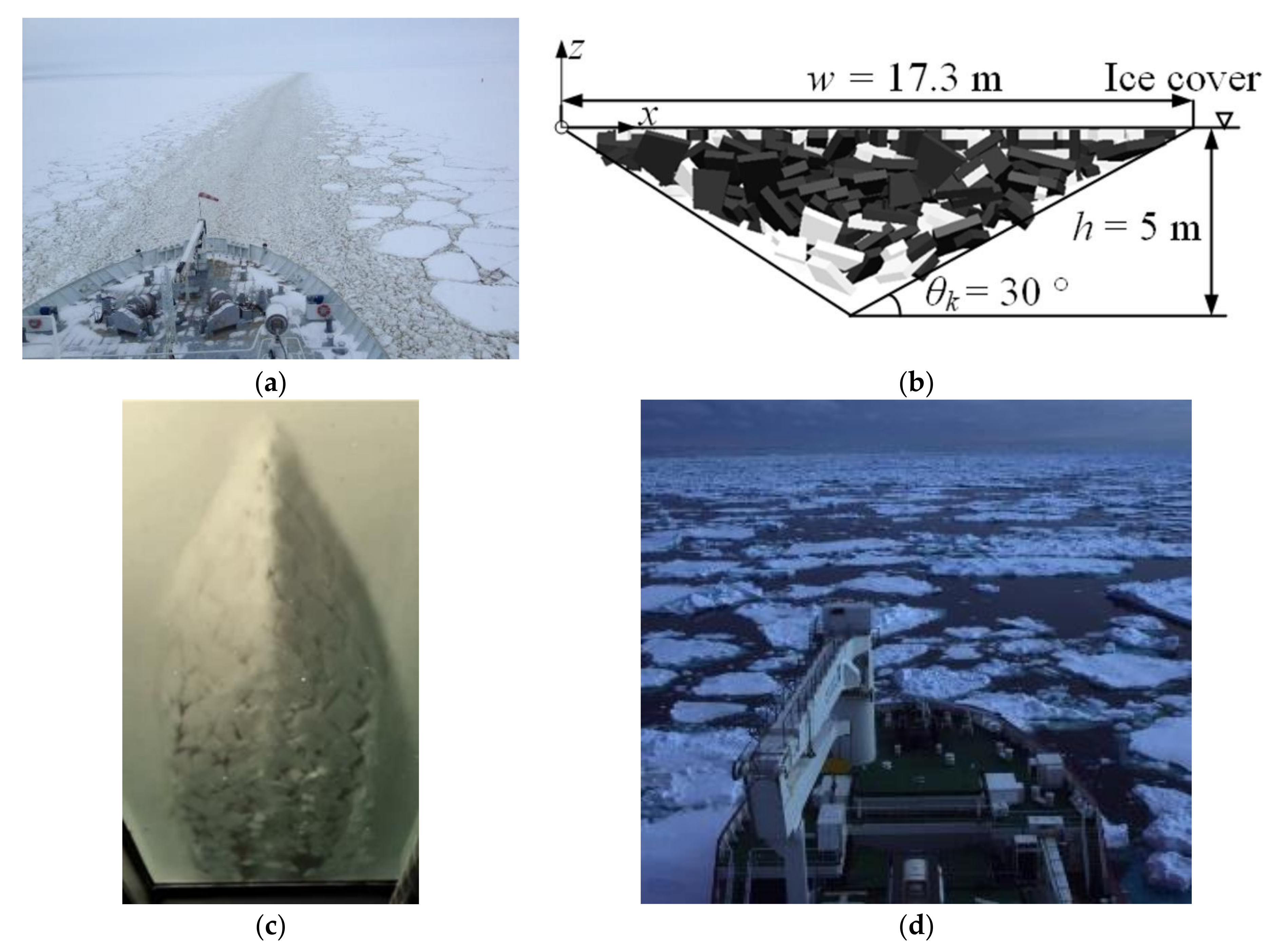
3.3. Ice Ridge
3.4. Sliding Ice Pieces from Icebreaking
4. Discussion
4.1. Modelling Breakable Ice Floe
4.2. Effect of Fluid Flow
4.3. Contact Modelling
4.4. Model Validation
5. Conclusions
- To date, the major computational models created to investigate a ship’s interactions with broken ice have focused on a ship’s interaction with ice floes. There are certain studies on the interaction with brash ice, but ridged ice and sliding ice pieces have received little attention despite their importance in a ships’ ice-going capability. More computational investigations on ridged ice and sliding ice pieces are required to fully understand these processes.
- Most models of ship interactions with ice floes are created for resistance estimation, while only a few works have addressed local ice loads. More future research is suggested on the estimation of local loads, which serves as a structural safety evaluation, especially in the context of merchant ships traveling through the Arctic region.
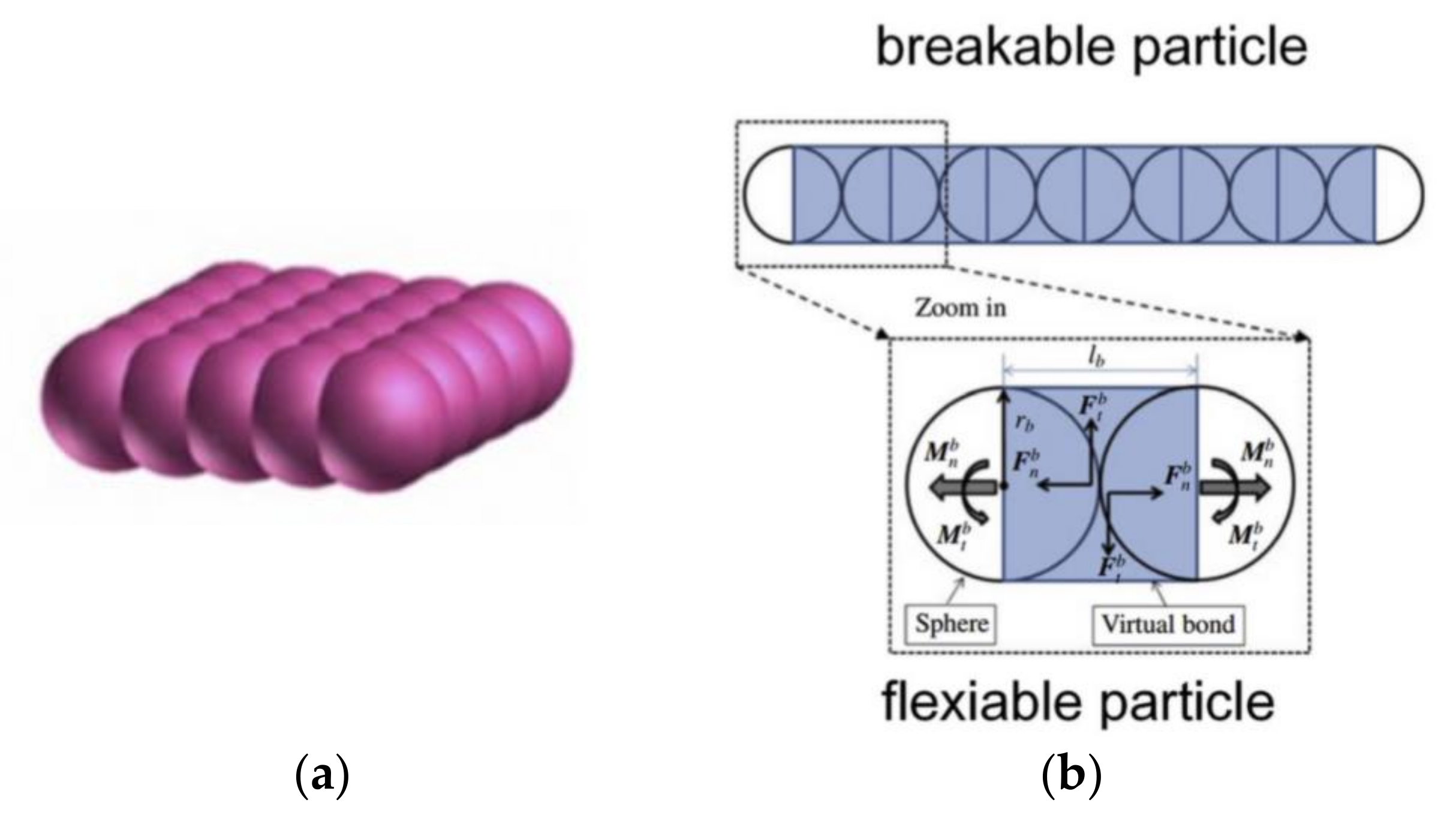
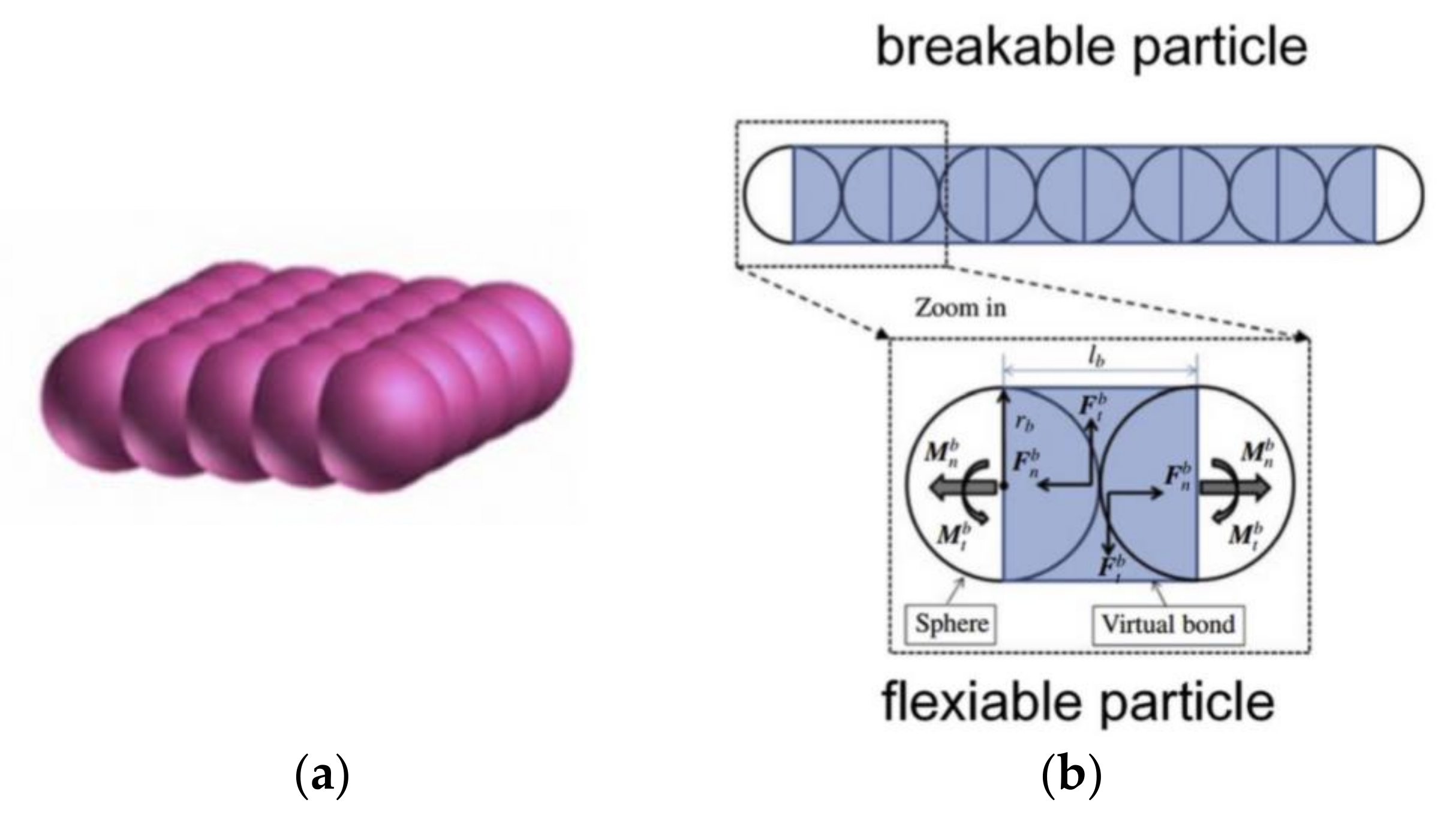
- Most models assume ice to be unbreakable, making them suitable for modelling broken ice only up to a certain size. Introducing a cracking mechanism can widen the range of applicability of the existing models. For example, this could be achieved by using clumped DEM particles.
- The role of crushing during a ship’s interaction with small-sized broken ice is recommended for investigation in future work. Many models simplify this process by defining it as elastic contacts due to the complexity of modelling, but the effect of small ice-piece crushing on ice resistance estimations has yet to be thoroughly clarified.
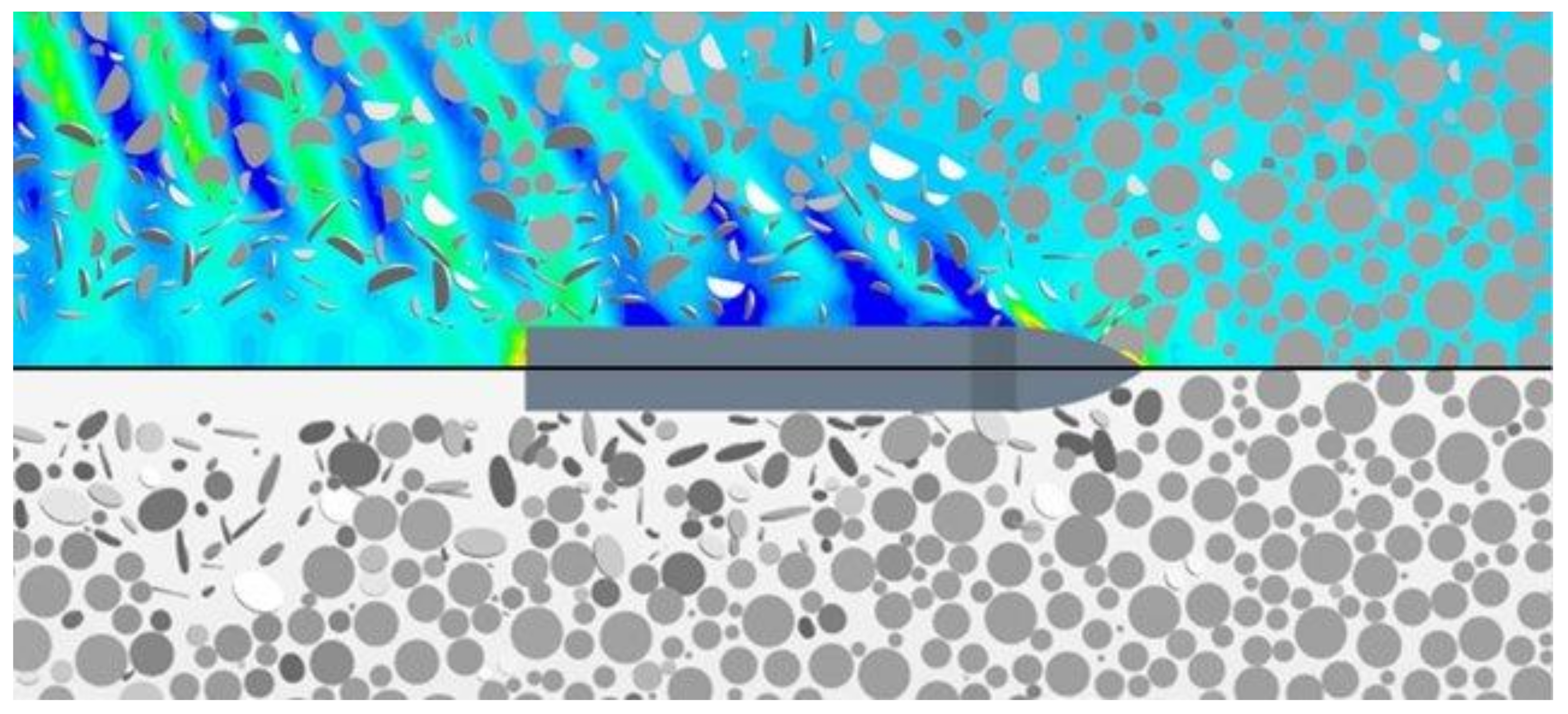
- The majority of existing models simplify the hydrodynamic force as drag and added mass, which deviates the estimation, especially when ship wakes play a big role in the movement of broken ice. Coupling between DEM and CFD offers good potential for dealing with the factor of broken ice interaction with ships. CFD gives good indications of the wake variation versus the ship speed, which is what the ship-associated flow mainly depends on. With a widespread reduction of the extent, thickness, and compactness of sea ice, hydrodynamics is expected to be increasingly important for studying ship-ice interactions. Therefore, further development and validation of CFD-based methods are particularly recommended.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Gong, H.; Polojärvi, A.; Tuhkuri, J. Discrete element simulation of the resistance of a ship in unconsolidated ridges. Cold Reg. Sci. Technol. 2019, 167, 102855. [Google Scholar] [CrossRef]
- Sazidy, M. Development of Velocity Dependent Ice Flexural Failure Model and Application to Safe Speed. Ph.D. Thesis, Memorial University of Newfoundland, St. John’s, NL, Canada, 2015. [Google Scholar]
- Huang, L.; Tuhkuri, J.; Igrec, B.; Li, M.; Stagonas, D.; Toffoli, A.; Cardiff, P.; Thomas, G. Ship resistance when operating in floating ice floes: A combined CFD&DEM approach. Mar. Struct. 2020, 74, 102817. [Google Scholar] [CrossRef]
- Keijdener, C.; Hendrikse, H.; Metrikine, A. The effect of hydrodynamics on the bending failure of level ice. Cold Reg. Sci. Technol. 2018, 153, 106–119. [Google Scholar] [CrossRef]
- Lindqvist, G. A straightforward method for calculation of ice resistance of ships. In Proceedings of the 10th International Conference on Port and Ocean Engineering under Arctic Conditions, Luleå, Sweden, 12–16 June 1989; pp. 722–735. [Google Scholar]
- Riska, K.; Wilhelmson, M.; Englund, K.; Leiviskä, T. Performance of Merchant Vessels in Ice in the Baltic; Research Report No. 52; Ship Laboratory, Helsinki University of Technology: Espoo, Finland, 1997. [Google Scholar]
- Malmberg, S. Omfartygs Fastkling i is (of Ship’s Becoming Beset in Ice). Master’s Thesis, Helsinki University of Technology, Espoo, Finland, 1983. [Google Scholar]
- Aboul-Azm, A. Ship Resistance in Ice Floe Covered Waters; Memorial University of Newfoundland: St. John’s, NL, Canada, 1989. [Google Scholar]
- Tuhkuri, J.; Polojärvi, A. A review of discrete element simulation of ice-structure interaction. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2018, 376, 20170335. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ji, S.; Li, Z.; Li, C.; Shang, J. Discrete element modeling of ice loads on ship and offshore structures. Acta Oceanol. Sin. 2013, 188, 45–54. [Google Scholar] [CrossRef] [Green Version]
- Daley, C.; Alawneh, S.; Peters, D.; Quinton, B.; Colbourne, B. GPU modeling of ship operations in pack ice. In Proceedings of the International Conference and Exhibition on Performance of Ships and Structures in Ice, Banff, AB, Canada, 17–20 September 2012; pp. 122–127. [Google Scholar]
- Lubbad, R.; Løset, S.; Lu, W.; Tsarau, A.; van den Berg, M. Simulator for Arctic Marine Structures (SAMS). In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE2018), Madrid, Spain, 17–22 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Sawamura, J. 2D numerical modeling of icebreaker advancing in ice-covered water. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 385–392. [Google Scholar] [CrossRef]
- Guo, C.Y.; Zhang, Z.T.; Tian, T.P.; Li, X.Y.; Zhao, G.D. Numerical Simulation on the Resistance Performance of Ice-Going Container Ship Under Brash Ice Conditions. China Ocean Eng. 2018, 32, 546–556. [Google Scholar] [CrossRef]
- Wang, C.; Hu, X.; Tian, T.; Guo, C.; Wang, C. Numerical simulation of ice loads on a ship in broken ice fields using an elastic ice model. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 414–427. [Google Scholar] [CrossRef]
- Luo, W.; Jiang, D.; Wu, T.; Guo, C.; Wang, C.; Deng, R.; Dai, S. Numerical simulation of an ice-strengthened bulk carrier in brash ice channel. Ocean Eng. 2020, 196, 106830. [Google Scholar] [CrossRef]
- Islam, M.; Mills, J.; Gash, R.; Pearson, W. A literature survey of broken ice-structure interaction modelling methods for ships and offshore platforms. Ocean Eng. 2021, 221, 108527. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, R.; Li, Z.; Han, D. A review for numerical simulation methods of ship–ice interaction. Ocean Eng. 2020, 215, 107853. [Google Scholar] [CrossRef]
- Metrikin, I.; Løset, S.; Jenssen, N.A.; Kerkeni, S. Numerical simulation of dynamic positioning in ice. Mar. Technol. Soc. J. 2013, 47, 14–30. [Google Scholar] [CrossRef] [Green Version]
- Aarsæther, K.G.; Su, B.; Kristiansen, D. Numerical study of a fishing vessel operating in partially ice covered waters. Proc. Int. Conf. Offshore Mech. Arct. Eng. OMAE 2018, 8, 1–8. [Google Scholar] [CrossRef]
- Liu, L.; Ji, S. Ice load on floating structure simulated with dilated polyhedral discrete element method in broken ice field. Appl. Ocean Res. 2018, 75, 53–65. [Google Scholar] [CrossRef]
- Popov, Y.N.; Faddeev, O.V.; Kheisin, D.E.; Yakovlev, A.A. Strength of Ships Sailing in Ice. Army foreign science and technology Centre: Charlottesville, VA, USA, 1969; Available online: https://apps.dtic.mil/sti/citations/AD0684596 (accessed on 26 December 2021).
- Riska, K. On the Mechanics of the Ramming Interaction Between a Ship and a Massive Ice Floe. Ph.D. Thesis, Helsinki University of Technology, Espoo, Finland, 1987. [Google Scholar] [CrossRef]
- Lu, W.; Lubbad, R.; Løset, S. In-plane fracture of an ice floe: A theoretical study on the splitting failure mode. Cold Reg. Sci. Technol. 2015, 110, 77–101. [Google Scholar] [CrossRef]
- Lu, W.; Lubbad, R.; Løset, S. Out-of-plane failure of an ice floe: Radial-crack-initiation-controlled fracture. Cold Reg. Sci. Technol. 2015, 119, 183–203. [Google Scholar] [CrossRef]
- Lu, W.; Lubbad, R.; Løset, S.; Kashafutdinov, M. Fracture of an ice floe: Local out-of-plane flexural failures versus global in-plane splitting failure. Cold Reg. Sci. Technol. 2016, 123, 1–13. [Google Scholar] [CrossRef]
- Fournier, N. Sea Ice Type Classification for Ship Performance Modelling; MET Office: Bristol, UK, 2019; Available online: www.sedna-project.eu (accessed on 26 December 2021).
- Daley, C.; Alawneh, S.; Peters, D.; Colbourne, B. GPU-Event-Mechanics evaluation of ice impact load statistics. In Proceedings of the Arctic Technology Conference, Houston, TX, USA, 10–12 February 2014. [Google Scholar]
- TRAFI Maritime Safety Regulation. Ice Class Regulations and the Application Thereof. TRAFI/494131/03.04.01.00/2016; TRAFICOM: Helsinki, Finland, 2010; Available online: https://www.traficom.fi/en/transport/maritime/ice-classes-ships (accessed on 26 December 2021).
- Li, F.; Suominen, M.; Lu, L.; Kujala, P.; Taylor, R. A probabilistic method for long-term estimation of ice loads on ship hull. Struct. Saf. 2021, 93, 102130. [Google Scholar] [CrossRef]
- Thomson, J.; Ackley, S.; Girard-Ardhuin, F.; Ardhuin, F.; Babanin, A.; Boutin, G.; Brozena, J.; Cheng, S.; Collins, C.; Doble, M.; et al. Overview of the Arctic Sea State and Boundary Layer Physics Program. J. Geophys. Res. Ocean. 2018, 123, 8674–8687. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z.; Ryan, C.; Ringsberg, J.W.; Pena, B.; Li, M.; Ding, L.; Thomas, G. Ship resistance when operating in floating ice floes: Derivation, validation, and application of an empirical equation. Mar. Struct. 2021, 79, 103057. [Google Scholar] [CrossRef]
- Li, Z.; Ryan, C.; Huang, L.; Ding, L.; Ringsberg, J.W.; Thomas, G. A comparison of two ship performance models against full-scale measurements on a cargo ship on the Northern Sea Route. Ships Offshore Struct. 2021, 16, 237–244. [Google Scholar] [CrossRef]
- Ryan, C.; Huang, L.; Li, Z.; Ringsberg, J.W.; Thomas, G. An Arctic ship performance model for sea routes in ice-infested waters. Appl. Ocean Res. 2021, 117, 102950. [Google Scholar] [CrossRef]
- Kim, H.; Im, N.; Sawamura, J. Experimental and numerical investigation of ship-ice interactions in pack ice. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions, Busan, Korea, 11–16 June 2017. [Google Scholar]
- Yang, B.; Sun, Z.; Zhang, G.; Wang, Q.; Zong, Z.; Li, Z. Numerical estimation of ship resistance in broken ice and investigation on the effect of floe geometry. Mar. Struct. 2021, 75, 102867. [Google Scholar] [CrossRef]
- Lau, M.; Lawrence, K.P.; Rothenburg, L. Discrete element analysis of ice loads on ships and structures. Ships Offshore Struct. 2011, 6, 211–221. [Google Scholar] [CrossRef] [Green Version]
- Zhan, D.; Agar, D.; He, M.; Spencer, D.; Molyneux, D. Numerical simulation of ship maneuvering in pack ice. Proc. Int. Conf. Offshore Mech. Arct. Eng. OMAE 2010, 4, 855–862. [Google Scholar] [CrossRef]
- McKenna, R.; Spencer, D.; Lau, M.; Walker, D.; Crocker, G. Modeling the forces exerted by pack ice consisting of small floes. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Yokohama, Japan, 13–17 April 1997; pp. 320–338. [Google Scholar]
- Paavilainen, J.; Tuhkuri, J.; Polojärvi, A. 2D numerical simulations of ice rubble formation process against an inclined structure. Cold Reg. Sci. Technol. 2011, 68, 20–34. [Google Scholar] [CrossRef]
- Polojärvi, A.; Tuhkuri, J. 3D discrete numerical modelling of ridge keel punch through tests. Cold Reg. Sci. Technol. 2009, 56, 18–29. [Google Scholar] [CrossRef]
- Polojärvi, A.; Gong, H.; Tuhkuri, J. Comparison of Full-scale and DEM simulation Data on Ice Loads Due to Floe Fields on a Ship Hull. In Proceedings of the 26th International Conference on Port and Ocean Engineering under Arctic Conditions, Moscow, Russia, 14–18 June 2021. [Google Scholar]
- Wang, J.; Derradji-Aouat, A. Ship Performance in Broken Ice Floes—Preliminary Numerical Simulations; Institute for Ocean Technology, National Research Council: St. John’s, NL, Canada, 2010. [Google Scholar] [CrossRef]
- Kim, M.-C.; Lee, S.-K.; Lee, W.-J.; Wang, J. Numerical and experimental investigation of the resistance performance of an icebreaking cargo vessel in pack ice conditions. Int. J. Nav. Archit. Ocean Eng. 2013, 5, 116–131. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Kim, Y.; Kim, H.S.; Jeong, S.Y. Numerical simulation of ice impacts on ship hulls in broken ice fields. Ocean Eng. 2019, 182, 211–221. [Google Scholar] [CrossRef]
- Guo, W.; Zhao, Q.S.; Tian, Y.K.; Zhang, C.W. Research on total resistance of ice-going ship for different floe ice distributions based on virtual mass method. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 957–966. [Google Scholar] [CrossRef]
- Janßen, C.F.; Mierke, D.; Rung, T. On the development of an efficient numerical ice tank for the simulation of fluid-ship-rigid-ice interactions on graphics processing units. Comput. Fluids 2017, 155, 22–32. [Google Scholar] [CrossRef]
- van den Berg, M.; Lubbad, R.; Løset, S. An implicit time-stepping scheme and an improved contact model for ice-structure interaction simulations. Cold Reg. Sci. Technol. 2018, 155, 193–213. [Google Scholar] [CrossRef]
- Lubbad, R.; Løset, S. A numerical model for real-time simulation of ship–ice interaction. Cold Reg. Sci. Technol. 2011, 65, 111–127. [Google Scholar] [CrossRef] [Green Version]
- Jou, O.; Celigueta, M.A.; Latorre, S.; Arrufat, F.; Oñate, E. A bonded discrete element method for modeling ship–ice interactions in broken and unbroken sea ice fields. Comput. Part. Mech. 2019, 6, 739–765. [Google Scholar] [CrossRef]
- Han, Y.; Sawamura, J. Fatigue damage calculation for ship hulls operating in pack ice. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions, Busan, Korea, 11–16 June 2017. [Google Scholar]
- Liu, R.W.; Xue, Y.Z.; Lu, X.K.; Cheng, W.X. Simulation of ship navigation in ice rubble based on peridynamics. Ocean Eng. 2018, 148, 286–298. [Google Scholar] [CrossRef]
- Konno, A. Resistance evaluation of ship navigation in brash ice channels with physically based modeling. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions, Lulea, Sweden, 9–12 June 2009; Volume 2, pp. 855–863. [Google Scholar]
- Mucha, P. Fully-coupled CFD-DEM for simulations of ships advancing through brash ice. In Proceedings of the SNAME Maritime Convention, Tacoma, DC, USA, 30 October–1 November 2019; Volume 1. [Google Scholar]
- Sorsimo, A.; Nyman, T.; Heinonen, J.; Transport, F.; Agency, S.; Agency, F.T. Ship-Ice Interaction in a Channel; Finnish Transport Safety Agency: Helsinki, Finland, 2016; Available online: https://arkisto.trafi.fi/filebank/a/1477641190/49e5c4fcfde337028da9f4487ba670c2/22897-WNRB_research_report_93.pdf (accessed on 26 December 2021).
- Prasanna, M.; Hisette, Q. Discrete Element Simulation of Ships Navigating Through Brash Ice Channels. In Proceedings of the OTC Arctic Technology Conference, Houston, TX, USA, 5–7 November 2018. [Google Scholar] [CrossRef]
- Vroegrijk, E.A.J. Application of the Discrete Element Method (DEM) on ship-ice interaction. In Proceedings of the International Conference and Exhibition on Performance of Ships and Structures in Ice 2012, ICETECH 2012, Banff, AB, Canada, 17–20 September 2012; pp. 128–132. [Google Scholar]
- Vroegrijk, E. Validation of CFD+DEM against measured data. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, St. John’s, NL, Canada, 31 May–5 June 2015; 2015; Volume 8, pp. 1–7. [Google Scholar] [CrossRef]
- Karulin, B.E. Simulation of ridge keel behaviour in direct shear and punch tests by discrete element method. In Proceedings of the 16th IAHR International Symposium on Ice, Dunedin, New Zealand, 2–6 December 2002; Volume 2002, pp. 143–151. [Google Scholar]
- Yulmetov, R.; Bailey, E.; Ralph, F. A discrete element model of ice ridge interaction with a conical structure. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions (POAC 2017), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Gong, H. Discrete-Element Modelling of Ship Interaction with Unconsolidated Ice Ridges: Ridge Resistance and Failure Behaviour. Ph.D. Thesis, Aalto University, Espoo, Finland, 2021. [Google Scholar]
- Hisette, Q.; Alekseev, A.; Seidel, J. Discrete element simulation of ship breaking through ice ridges. In Proceedings of the International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; pp. 1401–1409. [Google Scholar]
- Wang, F.; Zhou, L.; Zou, Z.J.; Song, M.; Wang, Y.; Liu, Y. Study of continuous icebreaking process with cohesive element method. Brodogradnja 2019, 70, 93–114. [Google Scholar] [CrossRef]
- Resistance tests in Ice. ITTC Recommended Procedures and Guidelines; The International Towing Tank Conference: Zürich, Switzerland, 2017; Available online: https://www.ittc.info/media/8053/75-02-04-021.pdf (accessed on 26 December 2021).
- Konno, A.; Mizuki, T. Numerical Simulation of Pre-sawn Ice Test of Model Icebreaker Using Physically Based Modeling. In Proceedings of the 18th IAHR International Symposium on Ice, Sapporo, Japan, 28 August–1 September 2006; pp. 17–23. [Google Scholar]
- Sawamura, J.; Tachibana, T. Development of a Numerical Simulation for Rotating and Sliding of the Ice Floes Along a Ship Hull. In Proceedings of the Port and Ocean Engineering under Arctic Conditions, Montreal, QC, Canada, 10–14 July 2011. [Google Scholar]
- Sawamura, J.; Kioka, S.; Konno, A. Experimental and numerical investigation on ice submerging for icebreaker with 2D model test using synthetic ice. In Proceedings of the 23rd International Conference on Port and Ocean Engineering under Arctic Conditions (POAC ‘15), Trondheim, Norway, 14–18 June 2015. [Google Scholar]
- Puntigliano, F. On the Resistance Components below the Waterline in the Continuous Mode of Icebreaking: Model Tests; Hamburgische Schiffbau-Versuchsanst: Hamburg, Germany, 1995. [Google Scholar]
- Kämäräinen, J. Theoretical Investigation on the Effect of Fluid Flow between the Hull of a Ship and Ice Floes on Ice Resistance in Level Ice. Ph.D. Thesis, Helsinki University of Technology, Espoo, Finland, 2007. [Google Scholar]
- Li, F.; Goerlandt, F.; Kujala, P. Numerical simulation of ship performance in level ice: A framework and a model. Appl. Ocean Res. 2020, 102, 102288. [Google Scholar] [CrossRef]
- Xu, Y.; Kujala, P.; Hu, Z.; Li, F.; Chen, G. Numerical simulation of level ice impact on landing craft bow considering the transverse isotropy of Baltic Sea ice based on XFEM. Mar. Struct. 2020, 71, 102735. [Google Scholar] [CrossRef]
- Liu, L.; Ji, S. Bond and fracture model in dilated polyhedral DEM and its application to simulate breakage of brittle materials. Granul. Matter 2019, 21, 41. [Google Scholar] [CrossRef]
- Zhong, W.; Yu, A.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Huang, L.; Ren, K.; Li, M.; Tuković, Ž.; Cardiff, P.; Thomas, G. Fluid-structure interaction of a large ice sheet in waves. Ocean Eng. 2019, 182, 102–111. [Google Scholar] [CrossRef] [Green Version]
- Bennetts, L.; Royal, T.W.-P. Water wave transmission by an array of floating discs. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20140698. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Li, M.; Romu, T.; Dolatshah, A.; Thomas, G. Simulation of a ship operating in an open-water ice channel. Ships Offshore Struct. 2021, 16, 353–362. [Google Scholar] [CrossRef]
- Li, F.; Suominen, M.; Kujala, P. Ship performance in ice channels narrower than ship beam: Model test and numerical investigation. Ocean Eng. 2021, 240, 109922. [Google Scholar] [CrossRef]
- Zhang, Q.; Skjetne, R. Image processing for identification of sea-ice floes and the floe size distributions. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2913–2924. [Google Scholar] [CrossRef]
- Li, F.; Khawar, M.; Sandru, A.; Lu, L.; Suominen, M.; Kujala, P. Full-scale measurement of ship performance and ice loads in Antarctic ice floe fields. In Proceedings of the Port and Ocean Engineering under Arctic Conditions, Moscow, Russia, 14–18 June 2021. [Google Scholar]
- Li, F.; Lu, L.; Suominen, M.; Kujala, P. Short-term statistics of ice loads on ship bow frames in floe ice fields: Full-scale measurements in the Antarctic ocean. Mar. Struct. 2021, 80, 103049. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Choi, K.; Kim, H.S. Investigation of ship resistance characteristics under pack ice conditions. Ocean Eng. 2021, 219, 108264. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contact Model | Floe Shape | Fluid Flow | Cracking | Validation | |
|---|---|---|---|---|---|
| Huang et al. [3] | Viscoelastic | Circular disk | CFD | No | Model test with synthetic ice; full-scale measurement |
| Ji et al. [10] | Viscoelastic | Circular disk | Empirical | No | No |
| Kim et al. [35] | Viscoelastic | Circular disk | Empirical | No | Model test with synthetic ice |
| Yang et al. [36] | Impulse | Polygon | Empirical | No | Model test with synthetic ice |
| DECICE | Viscoelastic | Polygon | Empirical | No | Model test with refrigerated ice |
| Polojarvi et al. [42] | Elastic-viscous-plastic | Square | Empirical | No | Full-scale measurement |
| Wang and Derradij-Aouat [43] | Elastic | Square | ALE | No | Model test with refrigerated ice |
| Kim et al. [44] | Elastic | Triangle | ALE | No | Model test with refrigerated ice and synthetic ice |
| Guo et al. [14] | Elastic | Square | ALE | No | Model test with synthetic ice |
| Wang et al. [15] | Elastic | Square | ALE | No | Model test with synthetic ice |
| Kim et al. [45] | Elastic | Polygon | Empirical | No | Model test with refrigerated ice |
| Guo et al. [46] | Viscoelastic | Square | Empirical | No | Model test with synthetic ice |
| Janßen et al. [47] | Impulse | Random | LBM | No | No |
| GEM | Plastic | Polygon | Empirical | Yes 1 | Full-scale measurement |
| SAMS | Elastic-viscous-plastic | Polygon | Empirical | Yes | Full-scale measurement |
| Jou et al. [50] | Viscoelastic | Rectangle | No | Yes | No |
| Sawamura [13] | Impulse | Rectangle | Empirical | Yes | No |
| Liu et al. [52] | Elastic | Polygon | No | Yes | No |
| Contact Model | Floe Shape | Fluid Flow | Validation | |
|---|---|---|---|---|
| Models for the brash ice channel | ||||
| Konno [53] | Impulse | Spherical and cubic | Empirical | No |
| Mucha [54] | Viscoelastic | Polyhedral | CFD | No |
| Luo et al. [16] | Viscoelastic | Tetrahedral and irregular polyhedral | CFD | Model test with refrigerated ice |
| Sorsimo et al. [55] | Elastic | Spherical | Empirical | No |
| Prasanna [56] | Elastic | Spherical | Empirical | Model test with refrigerated ice |
| Vroegrijk [57] | Viscoelastic | Spherical | CFD | Full-scale measurement |
| Models for ridged ice | ||||
| Gong et al. [1,61] | Viscoelastic | Cubic | Empirical | No |
| Hisette et al. [62] | Elastic | Cubic | Empirical | Model test with refrigerated ice |
| Models for sliding ice pieces | ||||
| Konno and Mizuki [65] | Impulse | Cubic | Empirical | No |
| Sawamura [66] | Impulse | Cubic | Empirical | Model test with synthetic ice |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Huang, L. A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice. J. Mar. Sci. Eng. 2022, 10, 165. https://doi.org/10.3390/jmse10020165
Li F, Huang L. A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice. Journal of Marine Science and Engineering. 2022; 10(2):165. https://doi.org/10.3390/jmse10020165
Chicago/Turabian StyleLi, Fang, and Luofeng Huang. 2022. "A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice" Journal of Marine Science and Engineering 10, no. 2: 165. https://doi.org/10.3390/jmse10020165
APA StyleLi, F., & Huang, L. (2022). A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice. Journal of Marine Science and Engineering, 10(2), 165. https://doi.org/10.3390/jmse10020165