
AIS-Enabled Weather Routing for Cargo Loss Prevention

 ,
,  ,
,  , and
, and
Abstract
1. Introduction
2. Related Work
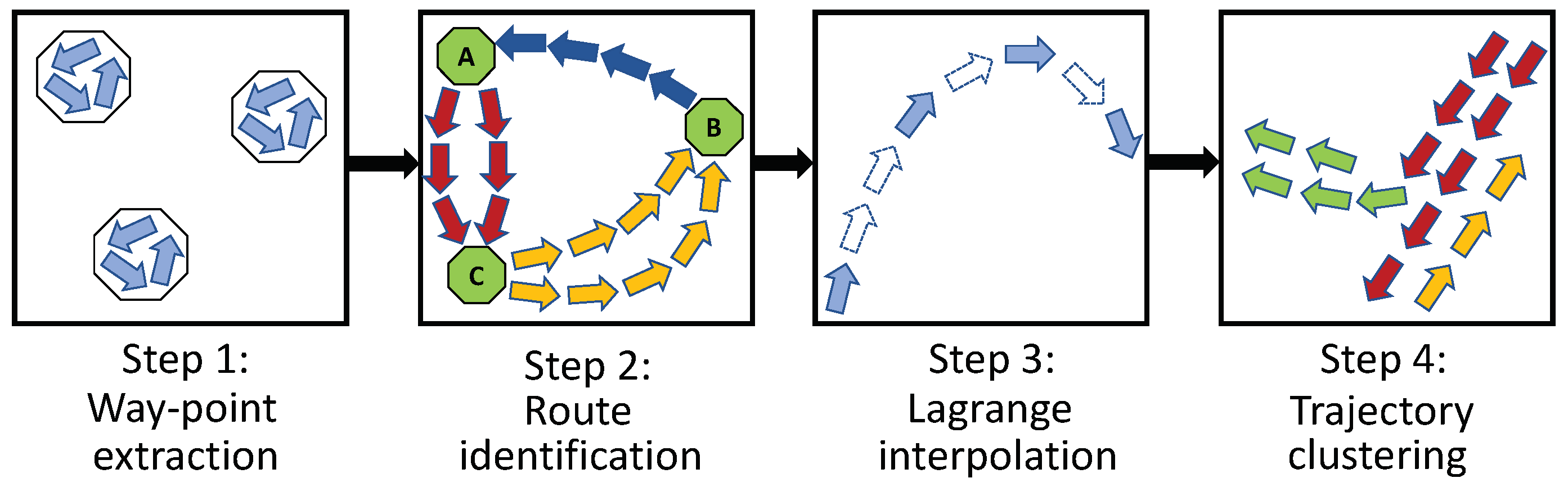
3. Methodology
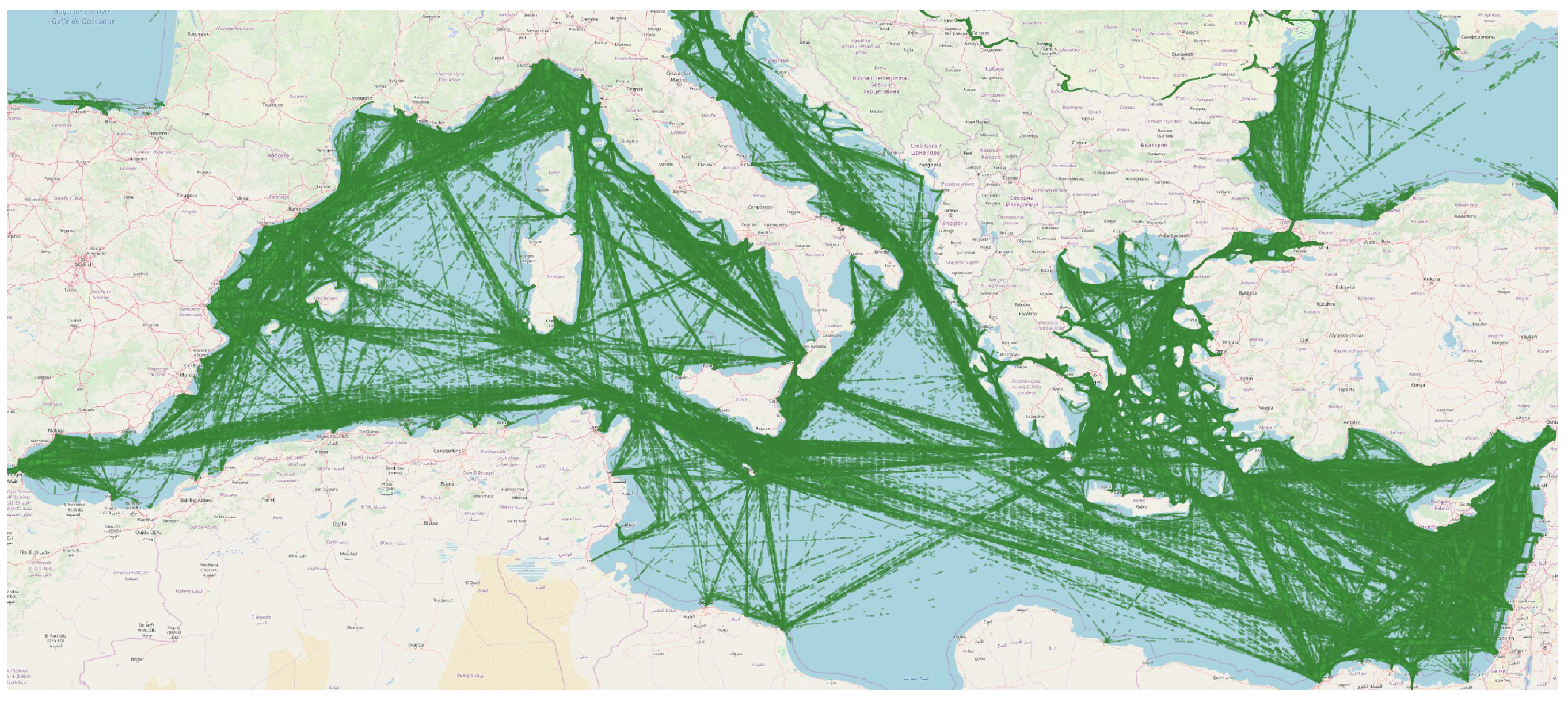
3.1. Preprocessing
3.2. Adverse Weather Conditions for Container Ships
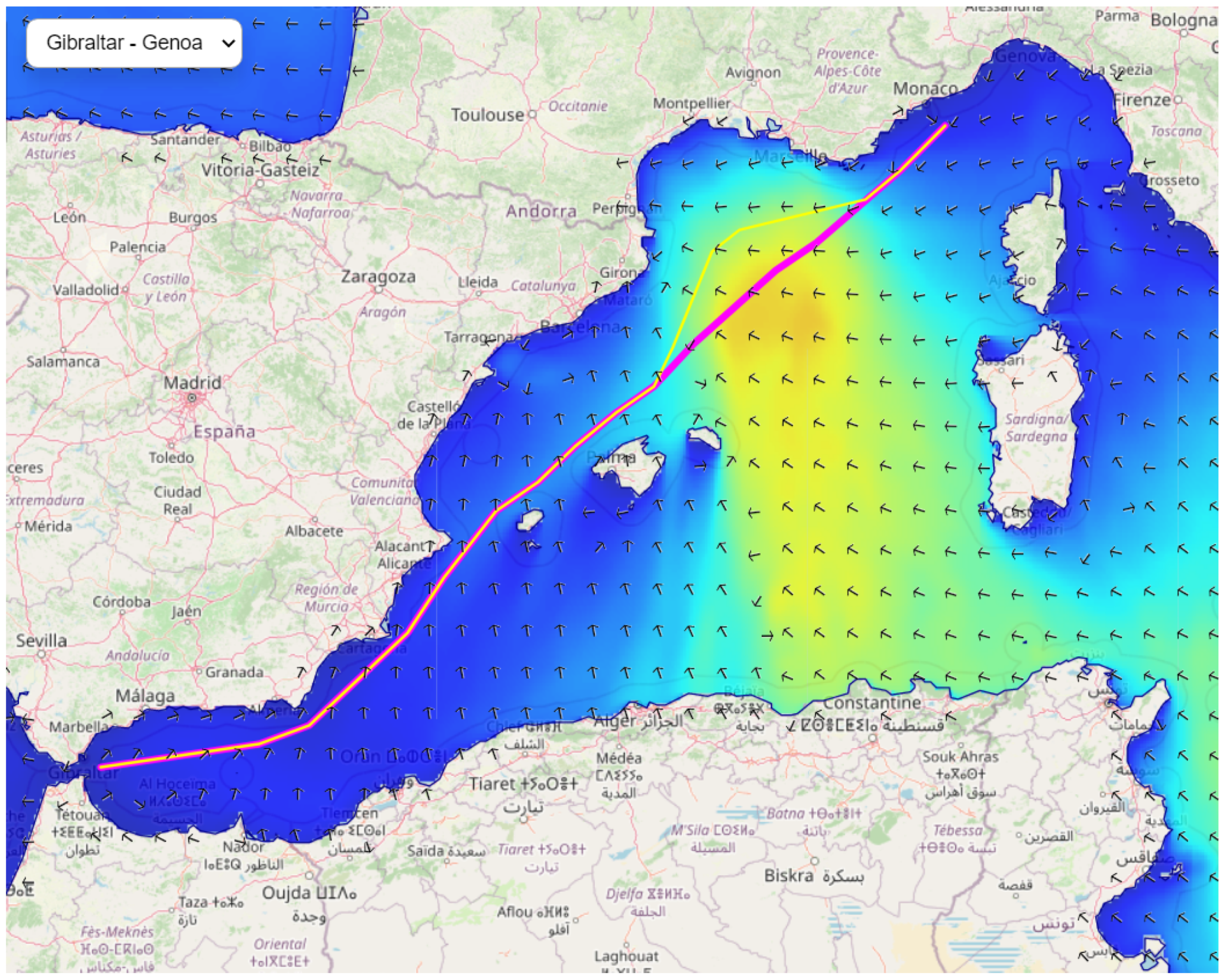
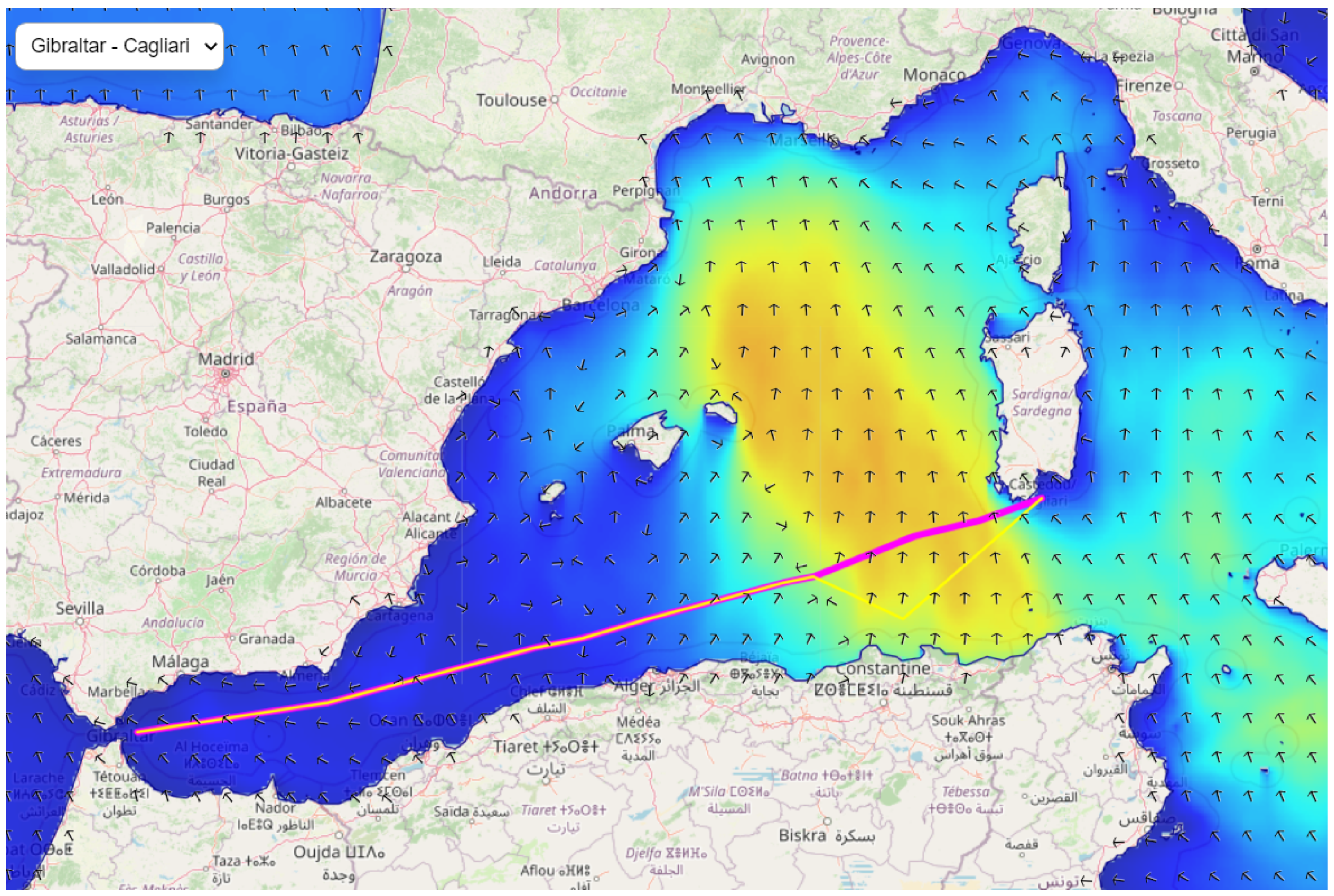
3.3. Weather Routing Algorithm
- The position of the next centroid is used to find the cell of the weather grid at which the vessel will be located.
- Given the timestamp and the grid cell of the next centroid, the weather conditions from the Copernicus services are retrieved (line 5).
- If the weather conditions are adverse (see Section 3.2), the nearest cell of the weather grid in the space–time that satisfies the weather thresholds is found (line 7). The centroid of the weather grid acts as the proposed alternative for the vessel to move to (line 8). If the weather conditions are not adverse, the initial centroid is used for the route (line 10). To speed up the process, the search space is limited to the distance the vessel would have traveled, given the mean speed of the centroid and the three-hour time horizon. To find the nearest cell, the nearest neighbor algorithm is employed, which finds the nearest cell in relation to distance from the route centroid using spatial indexing (R-tree). R-trees allow indexing data values, which are defined in two (or more) dimensions. The search strategy uses the best-first-search to query the index, where the values are provided in order of the increasing distance. We limited the search to a maximum of 10 nearest points.
- Finally, the next centroid of the initial route is considered the current one and the entire process repeats itself until there are no more centroids along the route.
| Algorithm 1 Weather Routing algorithm | |
| Input: A set of centroids along the initial route R, Weather Thresholds | |
| Output: A set of centroids along the optimized route | |
| 1: | functionRouteOptimization() |
| 2: | ← |
| 3: | for to do |
| 4: | ← |
| 5: | w← |
| 6: | if then |
| 7: | ← |
| 8: | |
| 9: | else |
| 10: | |
| 11: | return |
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
| 1 | Danaos Shipping, https://danaos.com/ (accessed on 2 November 2022). |
| 2 | https://wwwcdn.imo.org/localresources/en/OurWork/Safety/Documents/Stability/MSC.1-CIRC.1228.pdf (accessed on 2 November 2022). |
| 3 | https://marine.copernicus.eu/ (accessed on 2 November 2022). |
| 4 | https://climate.copernicus.eu/ (accessed on 2 November 2022). |
| 5 | https://wwwcdn.imo.org/localresources/en/OurWork/Safety/Documents/Stability/MSC.1-CIRC.1228.pdf (accessed on 2 November 2022). |
| 6 | https://wwwcdn.imo.org/localresources/en/OurWork/Environment/Documents/MEPC.1-CIRC.850-REV2.pdf (accessed on 2 November 2022). |
| 7 | (the first timestamp is the departure time). |
| 8 | (initially, this is the departure point). |
| 9 | (the Haversine—or great circle—distance is the angular distance between two points on the surface of a sphere). |
References
- Zhao, Z.; Ji, K.; Xing, X.; Zou, H.; Zhou, S. Ship surveillance by integration of space-borne SAR and AIS–review of current research. J. Navig. 2014, 67, 177–189. [Google Scholar] [CrossRef]
- Chen, S.; Hong, X.; Khalaf, E.; Morfeq, A.; Alotaibi, N.D. Adaptive B-spline neural network based nonlinear equalization for high-order QAM systems with nonlinear transmit high power amplifier. Digit. Signal Process. 2015, 40, 238–249. [Google Scholar] [CrossRef]
- Zis, T.P.; Psaraftis, H.N.; Ding, L. Ship weather routing: A taxonomy and survey. Ocean. Eng. 2020, 213, 107697. [Google Scholar] [CrossRef]
- Fabbri, T.; Vicen-Bueno, R.; Hunter, A. Multi-criteria weather routing optimization based on ship navigation resistance, risk and travel time. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 12–14 December 2018; pp. 135–140. [Google Scholar]
- Veneti, A.; Makrygiorgos, A.; Konstantopoulos, C.; Pantziou, G.; Vetsikas, I.A. Minimizing the fuel consumption and the risk in Maritime transportation: A bi-objective weather routing approach. Comput. Oper. Res. 2017, 88, 220–236. [Google Scholar] [CrossRef]
- Yang, J.; Wu, L.; Zheng, J. Multi-Objective Weather Routing Algorithm for Ships: The Perspective of Shipping Company’s Navigation Strategy. J. Mar. Sci. Eng. 2022, 10, 1212. [Google Scholar] [CrossRef]
- Walther, L.; Rizvanolli, A.; Wendebourg, M.; Jahn, C. Modeling and optimization algorithms in ship weather routing. Int. J. -Navig. Marit. Econ. 2016, 4, 31–45. [Google Scholar] [CrossRef]
- Pennino, S.; Gaglione, S.; Innac, A.; Piscopo, V.; Scamardella, A. Development of a new ship adaptive weather routing model based on seakeeping analysis and optimization. J. Mar. Sci. Eng. 2020, 8, 270. [Google Scholar] [CrossRef]
- Shao, W.; Zhou, P.; Thong, S.K. Development of a novel forward dynamic programming method for weather routing. J. Mar. Sci. Technol. 2012, 17, 239–251. [Google Scholar] [CrossRef]
- Wei, S.; Zhou, P. Development of a 3D dynamic programming method for weather routing. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2012, 6, 79–85. [Google Scholar]
- Papadakis, N.A.; Perakis, A.N. Deterministic minimal time vessel routing. Oper. Res. 1990, 38, 426–438. [Google Scholar] [CrossRef]
- Delitala, A.M.S.; Gallino, S.; Villa, L.a.; Lagouvardos, K.; Drago, A. Weather routing in long-distance Mediterranean routes. Theor. Appl. Climatol. 2010, 102, 125–137. [Google Scholar] [CrossRef]
- Shigunov, V.; Moctar, O.E.; Rathje, H. Operational guidance for prevention of cargo loss and damage on container ships. Ship Technol. Res. 2010, 57, 8–25. [Google Scholar] [CrossRef]
- Maki, A.; Akimoto, Y.; Nagata, Y.; Kobayashi, S.; Kobayashi, E.; Shiotani, S.; Ohsawa, T.; Umeda, N. A new weather-routing system that accounts for ship stability based on a real-coded genetic algorithm. J. Mar. Sci. Technol. 2011, 16, 311–322. [Google Scholar] [CrossRef]
- Perera, L.P.; Soares, C.G. Weather routing and safe ship handling in the future of shipping. Ocean. Eng. 2017, 130, 684–695. [Google Scholar] [CrossRef]
- Kontopoulos, I.; Varlamis, I.; Tserpes, K. A distributed framework for extracting Maritime traffic patterns. Int. J. Geogr. Inf. Sci. 2021, 35, 767–792. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. A dual linear autoencoder approach for vessel trajectory prediction using historical AIS data. Ocean. Eng. 2020, 209, 107478. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Achuthan, K.; Zhang, X. A ship movement classification based on Automatic Identification System (AIS) data using Convolutional Neural Network. Ocean. Eng. 2020, 218, 108182. [Google Scholar] [CrossRef]
- Volkova, T.A.; Balykina, Y.E.; Bespalov, A. Predicting ship trajectory based on neural networks using AIS data. J. Mar. Sci. Eng. 2021, 9, 254. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.; Soares, C.G. Data mining approach to shipping route characterization and anomaly detection based on AIS data. Ocean. Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.Y. Ship-handling behavior pattern recognition using AIS sub-trajectory clustering analysis based on the T-SNE and spectral clustering algorithms. Ocean. Eng. 2020, 205, 106919. [Google Scholar] [CrossRef]
- Varlamis, I.; Kontopoulos, I.; Tserpes, K.; Etemad, M.; Soares, A.; Matwin, S. Building navigation networks from multi-vessel trajectory data. GeoInformatica 2021, 25, 69–97. [Google Scholar] [CrossRef]
- Kim, S.H.; Roh, M.I.; Oh, M.J.; Park, S.W.; Kim, I.I. Estimation of ship operational efficiency from AIS data using big data technology. Int. J. Nav. Archit. Ocean. Eng. 2020, 12, 440–454. [Google Scholar] [CrossRef]
- Kaklis, D.; Eirinakis, P.; Giannakopoulos, G.; Spyropoulos, C.; Varelas, T.J.; Varlamis, I. A big data approach for Fuel Oil Consumption estimation in the Maritime industry. In Proceedings of the 2022 IEEE Eighth International Conference on Big Data Computing Service and Applications (BigDataService), Newark, CA, USA, 15–18 August 2022; 2022; pp. 39–47. [Google Scholar]
- Kaklis, D.; Giannakopoulos, G.; Varlamis, I.G.; Spyropoulos, C.; Varelas, T.J. A data mining approach for predicting main-engine rotational speed from vessel-data measurements. In Proceedings of the IDEAS’19: Proceedings of the 23rd International Database Applications & Engineering Symposium, Athens, Greece, 10–12 June 2019; ACM: New York, NY, USA, 2019; pp. 1–10. [Google Scholar]
- Kaklis, D.; Giannakopoulos, G.; Varlamis, I.G.; Spyropoulos, C.; Varelas, T.J. Online Training for Fuel Oil Consumption Estimation: A Data Driven Approach. In Proceedings of the 23rd IEEE International Conference on Mobile Data Management (MDM), Paphos, Cyprus, 6–9 June 2022; pp. 1–10. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Significant Wave Height (m) | Peak Wave Period (s) | Mean Wind Speed (m/s) | Wave Direction (Range in ) |
|---|---|---|---|
| ≤6.0 | ≤22.6 | 60–120° and 240–300° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spyrou-Sioula, K.; Kontopoulos, I.; Kaklis, D.; Makris, A.; Tserpes, K.; Eirinakis, P.; Oikonomou, F. AIS-Enabled Weather Routing for Cargo Loss Prevention. J. Mar. Sci. Eng. 2022, 10, 1755. https://doi.org/10.3390/jmse10111755
Spyrou-Sioula K, Kontopoulos I, Kaklis D, Makris A, Tserpes K, Eirinakis P, Oikonomou F. AIS-Enabled Weather Routing for Cargo Loss Prevention. Journal of Marine Science and Engineering. 2022; 10(11):1755. https://doi.org/10.3390/jmse10111755
Chicago/Turabian StyleSpyrou-Sioula, Kalliopi, Ioannis Kontopoulos, Dimitrios Kaklis, Antonios Makris, Konstantinos Tserpes, Pavlos Eirinakis, and Fotis Oikonomou. 2022. "AIS-Enabled Weather Routing for Cargo Loss Prevention" Journal of Marine Science and Engineering 10, no. 11: 1755. https://doi.org/10.3390/jmse10111755
APA StyleSpyrou-Sioula, K., Kontopoulos, I., Kaklis, D., Makris, A., Tserpes, K., Eirinakis, P., & Oikonomou, F. (2022). AIS-Enabled Weather Routing for Cargo Loss Prevention. Journal of Marine Science and Engineering, 10(11), 1755. https://doi.org/10.3390/jmse10111755