Path Planning of Multi-Objective Underwater Robot Based on Improved Sparrow Search Algorithm in Complex Marine Environment


Abstract
:1. Introduction
2. Modeling Multi-Objective AUV Path Planning Problems in Complex Ocean Environments
3. An Improved Sparrow Search Algorithm
3.1. Discoverer Adaptive Adjustment Strategy
3.2. Follower Variable Spiral Search Strategy
3.3. Levy Flight Strategy
3.4. Cauchy–Gaussian Mutation Strategy
4. Method for AUV Path Planning Based on Improved SSA
4.1. Path Coding
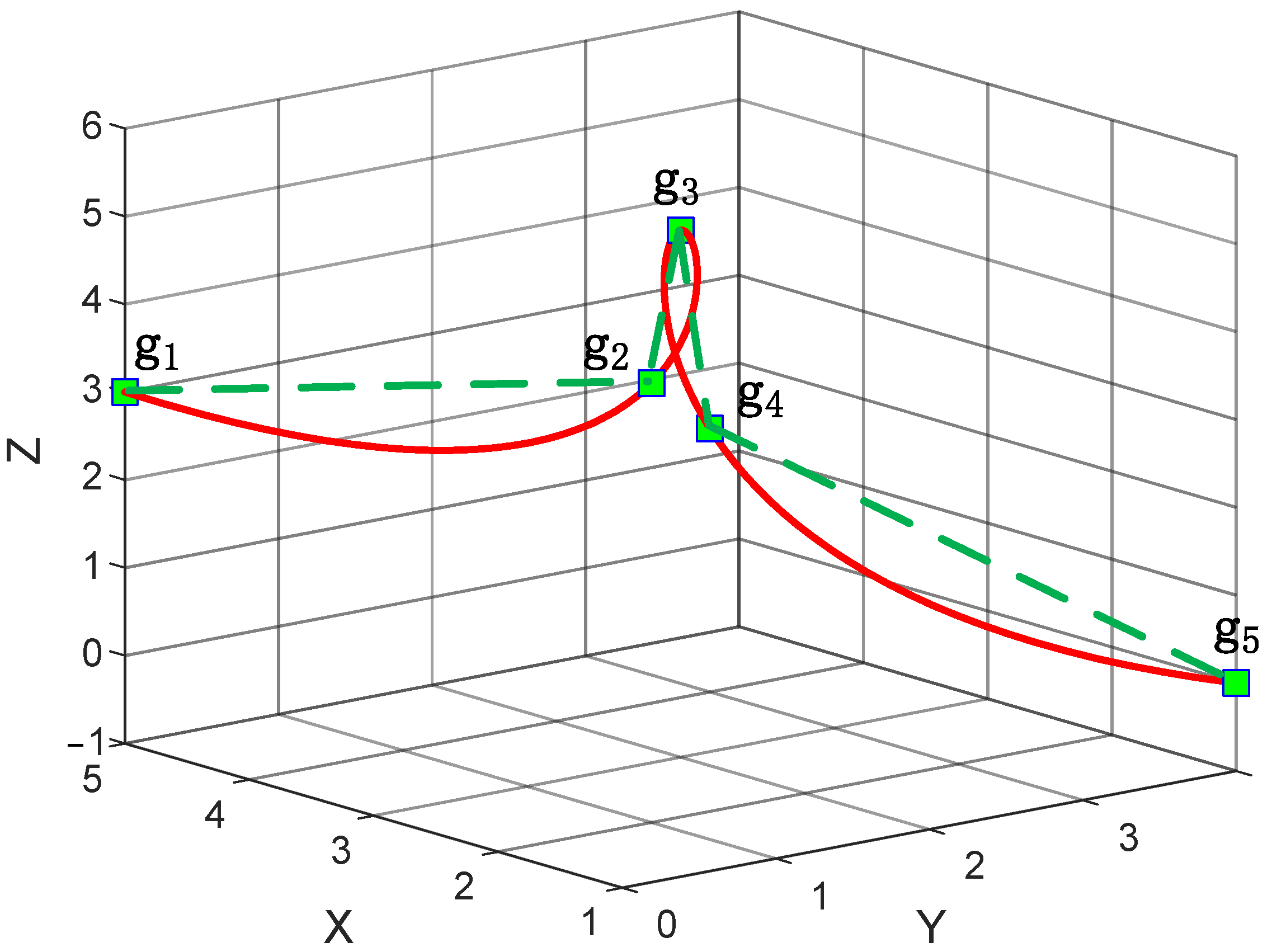
4.2. Decoding of Path Smoothing Based on B-Spline Interpolation
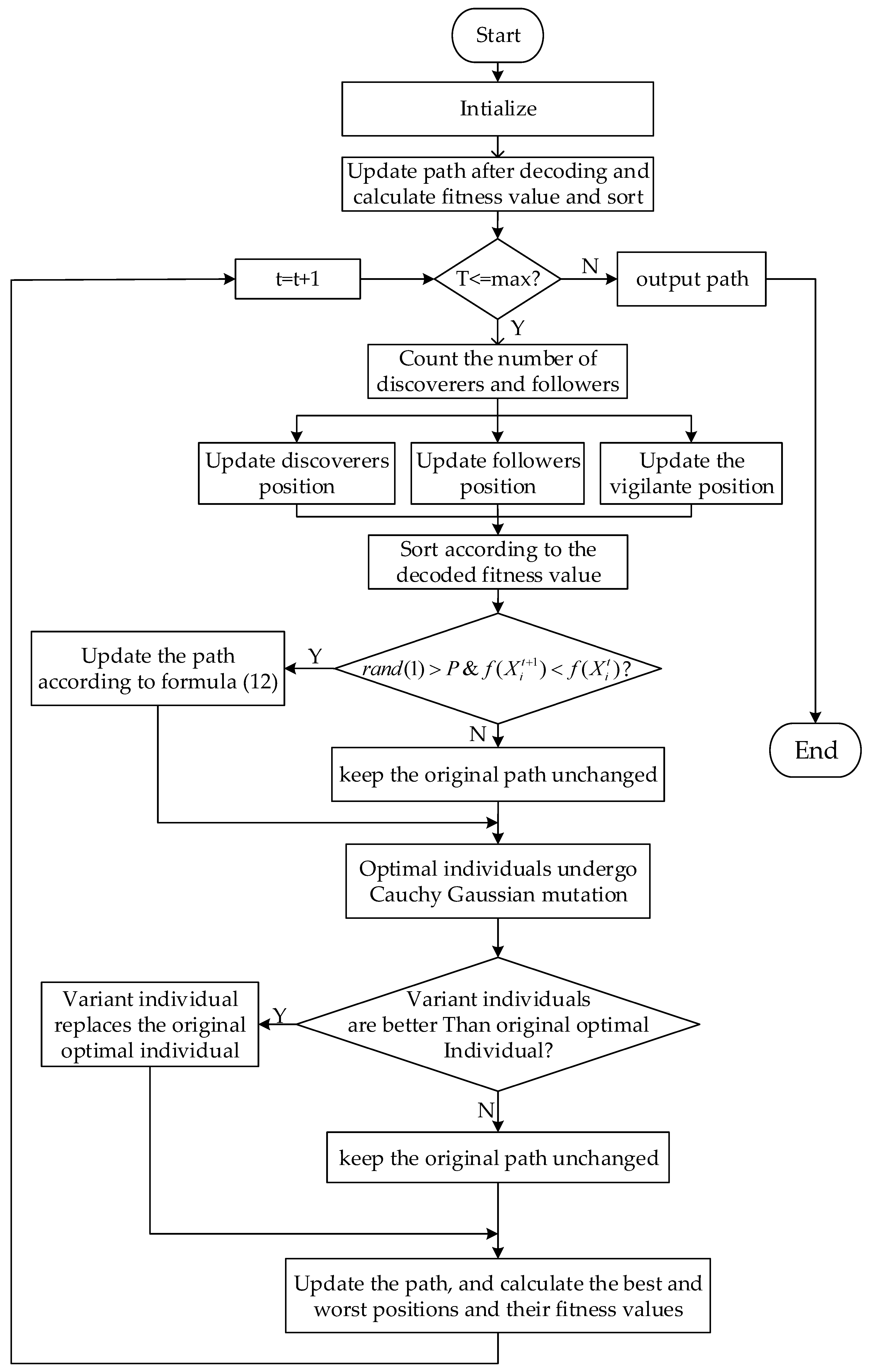
4.3. Improved SSA for AUV Path Planning
| Algorithm 1: Improved SSA algorithm AUV path planning pseudo-code |
| /*Initialization*/ |
| 1. Set the maximum iterations as ; |
| 2. Set the total number of sparrows as ; |
| 3. Set the number of discoverers as ; |
| 4. Set the number of sparrows perceiving danger as ; |
| 5. Set the alarm value as ; |
| 6. Set the start point , target point , the boundaries of the map space and the number of control points ; |
| 7. Set the position and range of threat areas and spherical obstacles, initialize the currents and initialize the sparrow population by the principle of trajectory coding; |
| /*Iterative search*/ |
| 8. While(t < ) |
| 9. Each sparrow represents a path. After decoding the generated path, the cost is calculated using the cost function Equation (1), and then the sparrow population is sorted; |
| 10. ; |
| 11. for |
| 12. Update the discoverer’s position using Equation (8); |
| 13. end for |
| 14. for |
| 15. Update the follower’s position using Equation (10); |
| 16. end for |
| 17. for |
| 18. Update the threatened sparrow’s position; |
| 19. end for |
| 20. for |
| 21. if |
| 22. if |
| 23. Update the sparrow position using Equation (12); |
| 24. end if |
| 25. end if |
| 26. end for |
| 27. Update the optimal sparrow position using Equation (14); |
| 28. Get the current new path; |
| 29. If the new path is better than before, update it; |
| 30. |
| 31. end while |
| 32. Output the best route and its cost value. |
| 33. Post-processing and visualization |
5. Simulation Experiment and Result Analysis
5.1. Comparison of Simulation Results in Offshore Sea Scenarios
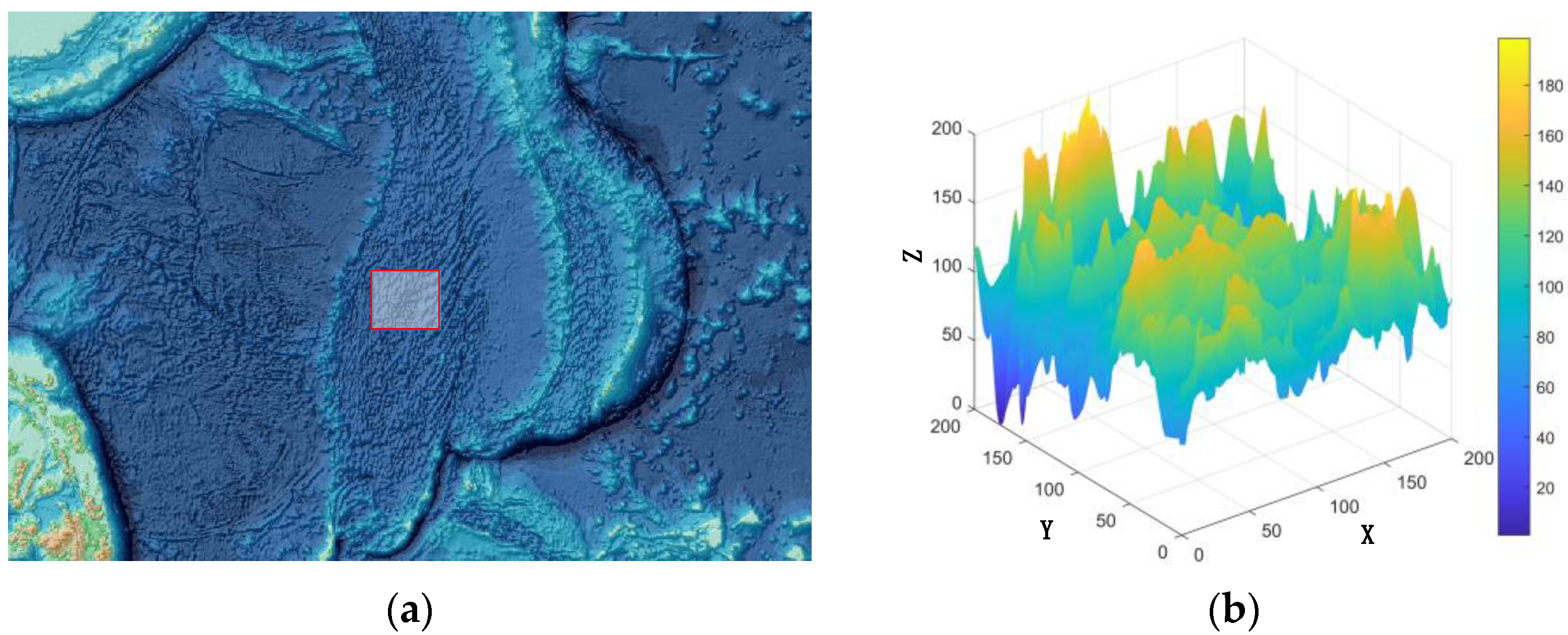
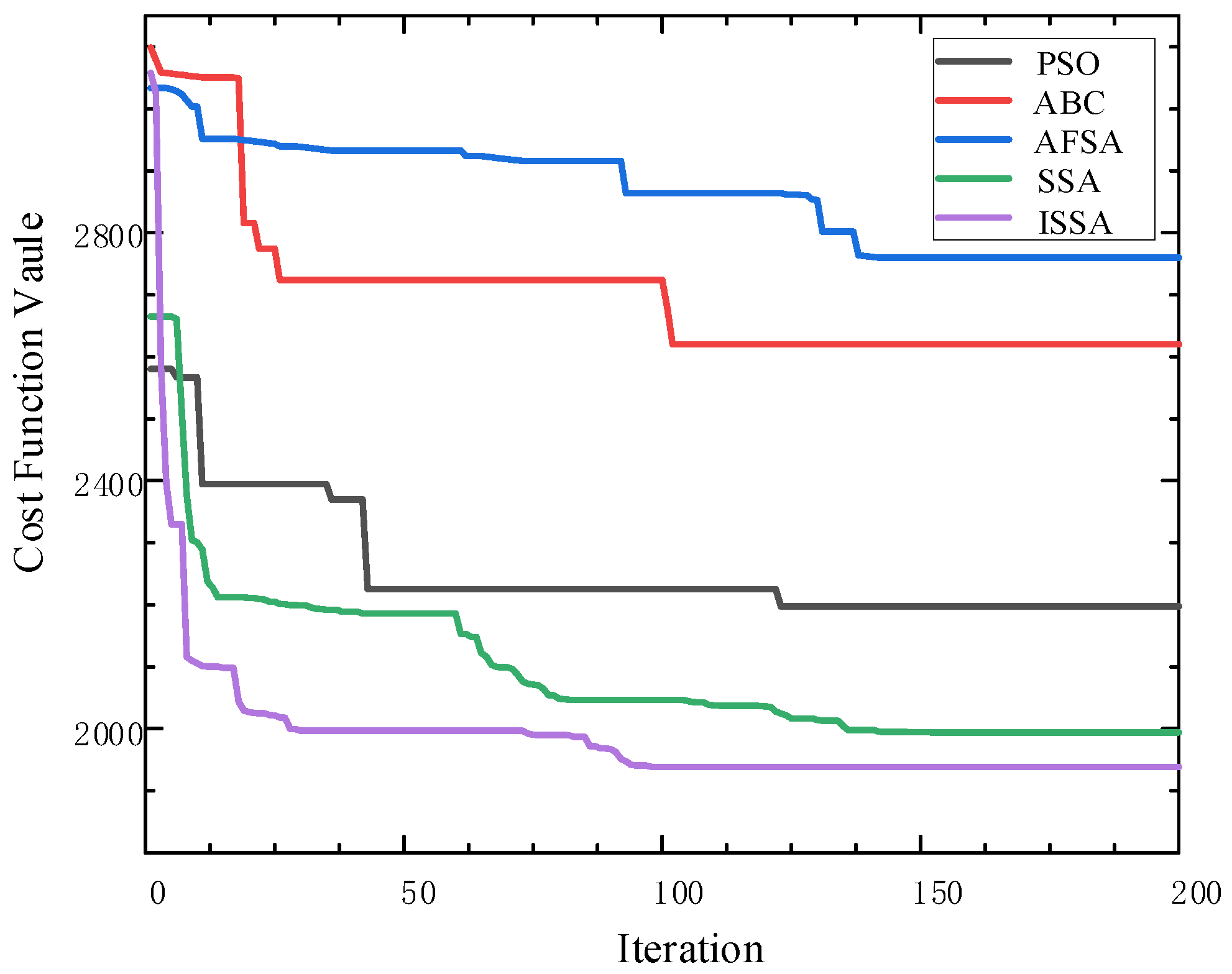
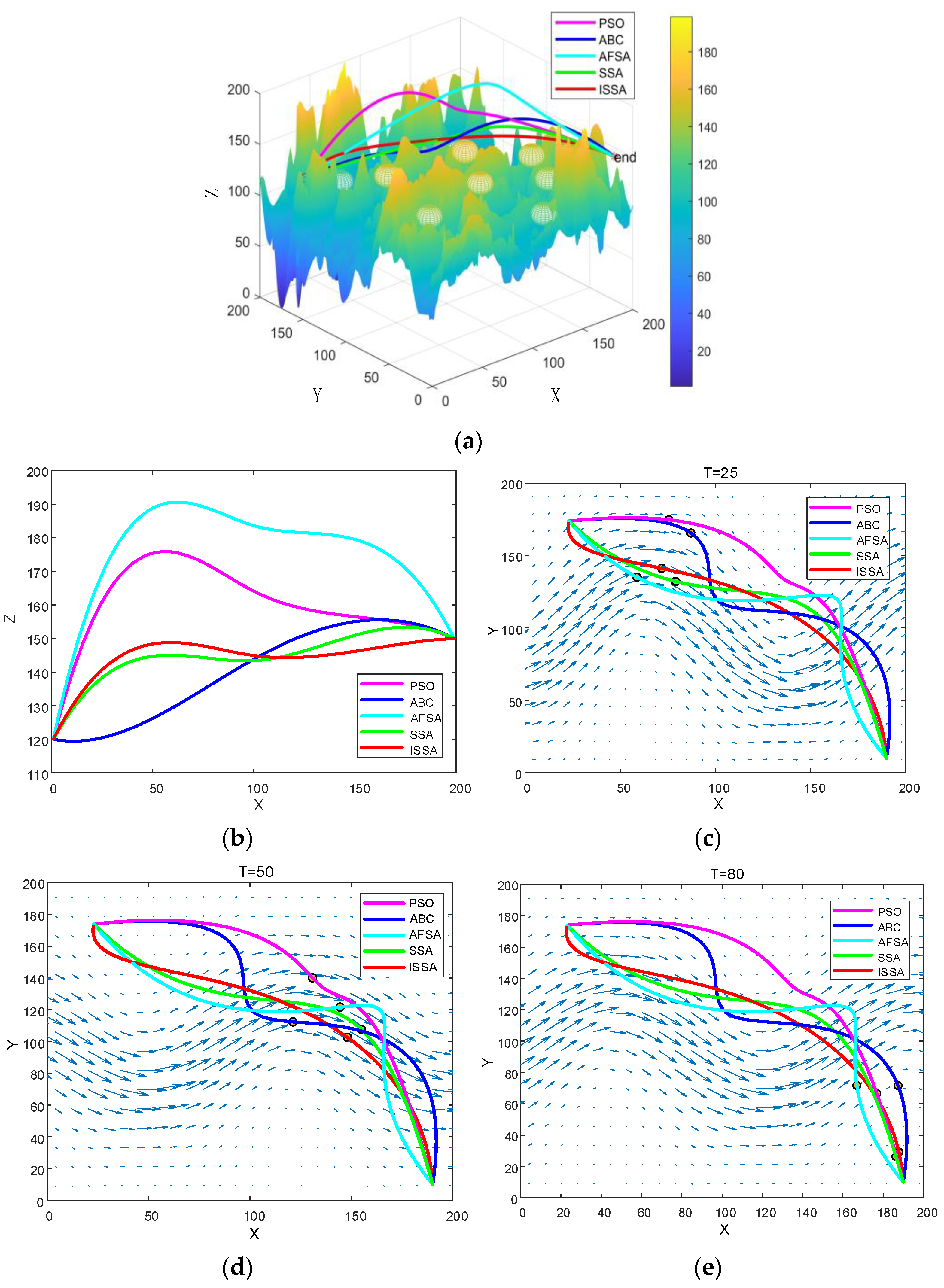
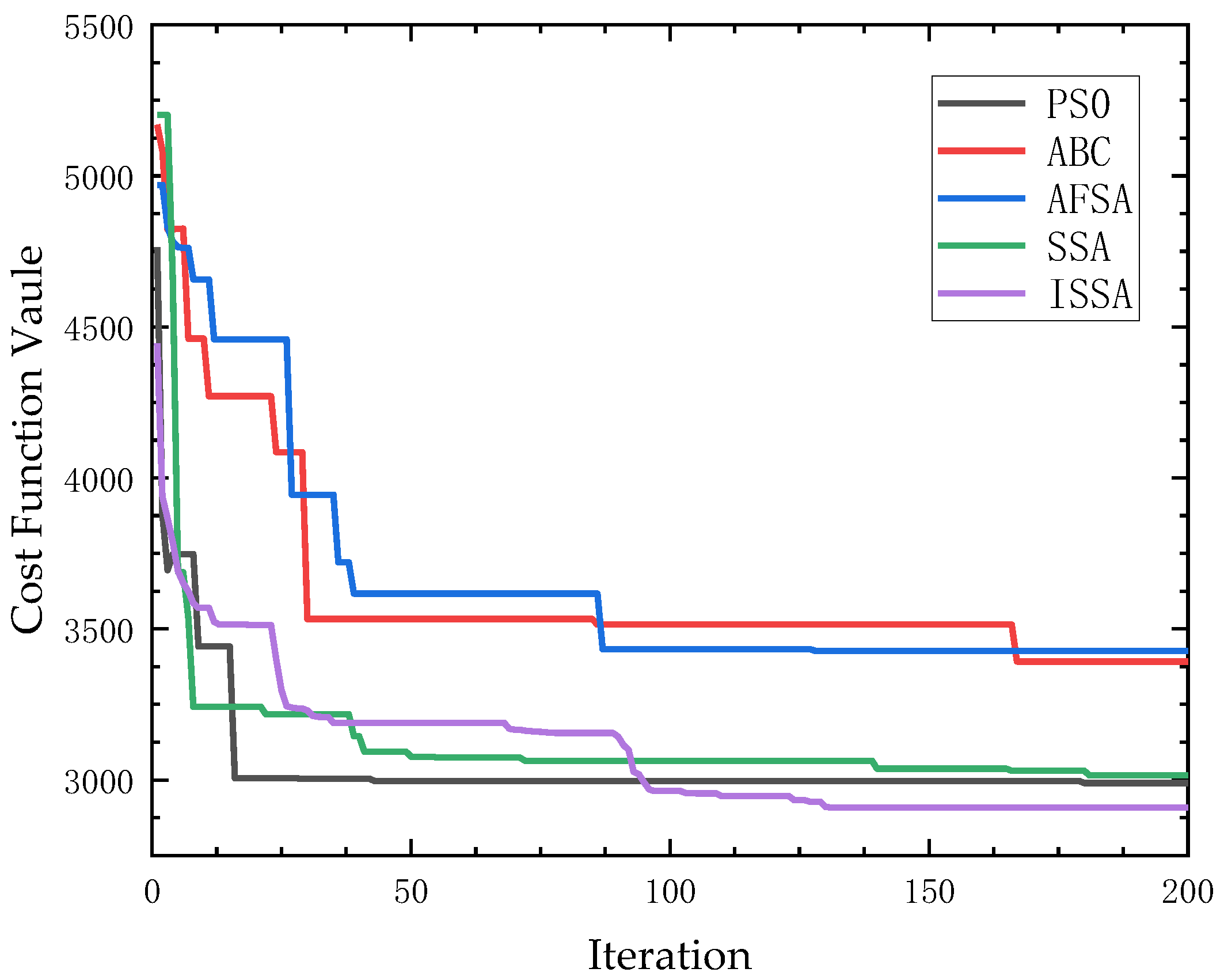
5.2. Comparison of Simulation Results in Distant Sea Scenarios
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Teng, M.; Ye, L.; Yuxin, Z.; Yanqing, J.; Zheng, C.; Qiang, Z.; Shuo, X. An AUV localization and path planning algorithm for terrain-aided navigation. ISA Trans. 2020, 103, 215–227. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kim, S.; Choo, Y. Stealth path planning for a high speed torpedo-shaped autonomous underwater vehicle to approach a target ship. Cyber-Phys. Syst. 2018, 4, 1–16. [Google Scholar] [CrossRef]
- Kumar, S.V.; Jayaparvathy, R.; Priyanka, B. Efficient path planning of AUVs for container ship oil spill detection in coastal areas. Ocean Eng. 2020, 217, 107932. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Mandloi, D.; Arya, R.; Verma, A.K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3d environment. Int. J. Syst. Assur. Eng. Manag. 2021, 12, 990–1000. [Google Scholar] [CrossRef]
- Sun, B.; Zhang, W.; Li, S.; Zhu, X. Energy optimised D* AUV path planning with obstacle avoidance and ocean current en-vironment. J. Navig. 2022, 75, 685–703. [Google Scholar] [CrossRef]
- Zhu, D.; Yang, S.X. Path planning method for unmanned underwater vehicles eliminating effect of currents based on artificial potential field. J. Navig. 2021, 74, 955–967. [Google Scholar] [CrossRef]
- Che, G.; Liu, L.; Yu, Z. An improved ant colony optimization algorithm based on particle swarm optimization algorithm for path planning of autonomous underwater vehicle. J. Ambient Intell. Humaniz. Comput. 2020, 11, 3349–3354. [Google Scholar] [CrossRef]
- Ma, Y.N.; Gong, Y.J.; Xiao, C.F.; Gao, Y.; Zhang, J. Path planning for autonomous underwater vehicles: An ant colony al-gorithm incorporating alarm pheromone. IEEE Trans. Veh. Technol. 2018, 68, 141–154. [Google Scholar] [CrossRef]
- Cao, Y.; Wei, W.; Bai, Y.; Qiao, H. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm. Clust. Comput. 2019, 22, 5175–5184. [Google Scholar] [CrossRef]
- Yuan, J.; Wang, H.; Zhang, H.; Lin, C.; Yu, D.; Li, C. AUV Obstacle Avoidance Planning Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2020, 9, 1166. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Li, S.; Wang, X. Global path planning for AUV based on charts and the improved particle swarm opti-mization algorithm. Robotics 2020, 42, 120–128. [Google Scholar]
- Yin, S.; Mao, J.; Li, B. AUV 3D Path Planning Based on Improved Empire Competition Algorithm in Ocean Current Environment. In Proceedings of the 6th International Conference on Computing, Control and Industrial Engineering (CCIE 2021), Hangzhou, China, 15–16 January 2021; pp. 36–49. [Google Scholar]
- Cao, X.; Sun, C.; Chen, M. Path planning for autonomous underwater vehicle in time—Varying current. IET Intell. Transp. Syst. 2019, 13, 1265–1271. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Powers, D.M.W.; Yazdani, A.M.; Sammut, K.; Atyabi, A. Efficient AUV Path Planning in Time-Variant Underwater Environment Using Differential Evolution Algorithm. J. Mar. Sci. Appl. 2018, 17, 585–591. [Google Scholar] [CrossRef]
- Cheng, Y.; Mei, Y.; Yu, J.; Su, X.; Xu, N. Three-dimensional unmanned aerial vehicle path planning using modified wolf pack search algorithm. Neurocomputing 2017, 266, 445–457. [Google Scholar]
- Zhang, R.; Li, S.; Ding, Y.; Qin, X.; Xia, Q. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization. Sensors 2022, 22, 5232. [Google Scholar] [CrossRef]
- Yao, X.; Wang, F.; Wang, J.; Wang, X. Energy-optimal path planning for AUV with time-variable ocean currents. Control Decis. 2020, 35, 2424–2432. [Google Scholar]
- Eichhorn, M. Optimal routing strategies for autonomous underwater vehicles in time-varying environment. Robot. Auton. Syst. 2015, 67, 33–43. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Li, M.; Xu, G.; Fu, Y.; Zhang, T.; Du, L. Improved whale optimization algorithm based on variable spiral position update strategy and adaptive inertia weight. J. Intell. Fuzzy Syst. 2022, 42, 1501–1517. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Yıldız, B.S.; Pholdee, N.; Bureerat, S.; Erdaş, M.U.; Yıldız, A.R.; Sait, S.M. Comparision of the political optimization algorithm, the Archimedes optimization algorithm and the Levy flight algorithm for design optimization in industry. Mater. Test. 2021, 63, 356–359. [Google Scholar] [CrossRef]
- Nautiyal, B.; Prakash, R.; Vimal, V.; Liang, G.; Chen, H. Improved Salp Swarm Algorithm with mutation schemes for solving global optimization and engineering problems. Eng. Comput. 2021, 7, 1–23. [Google Scholar] [CrossRef]
- Noreen, I. Collision Free Smooth Path for Mobile Robots in Cluttered Environment Using an Economical Clamped Cubic B-Spline. Symmetry 2020, 12, 1567. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, Z.; Yang, Y.; Yin, Y. Three-dimensional global path planning for UUV based on artificial fish swarm and ant colony algorithm. Acta Armamentarii 2022, 43, 1676–1684. [Google Scholar]
- Zhan, B.; An, S.; He, Y.; Wang, L. Three-Dimensional Path Planning for AUVs Based on Standard Particle Swarm Optimization Algorithm. J. Mar. Sci. Eng. 2020, 10, 1253. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Pourpanah, F.; Wang, R.; Lim, C.P.; Wang, X.-Z.; Yazdani, D. A review of artificial fish swarm algorithms: Recent advances and applications. Artif. Intell. Rev. 2022, 6, 1–37. [Google Scholar] [CrossRef]
- Patil, V.S.; Bano, F.; Kurahatti, R.; Patil, A.Y.; Raju, G.; Afzal, A.; Soudagar, M.E.M.; Kumar, R.; Saleel, C.A. A study of sound pressure level (SPL) inside the truck cabin for new acoustic materials: An experimental and FEA approach. Alex. Eng. J. 2021, 60, 5949–5976. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, H.; Fan, X.; Lyu, W. Research Progress of Path Planning Methods for Autonomous Underwater Vehicle. Math. Probl. Eng. 2021, 2021, 8847863. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terrain Scene | Start Point | Target Point | Center Point Coordinates | Action Radius(Units) |
|---|---|---|---|---|
| Offshore sea scene with cylindrical threat source | (15, 14, 80) | (172, 185, 80) | (150, 50), (50, 150), (40, 50), (150, 150), (120, 10), (110, 100) | 10 |
| Distant sea scene with spherical obstacles | (23, 174, 120) | (190, 10, 150) | (150, 40, 130), (50, 165, 110), (50, 110, 140), (150, 150, 110), (120, 10, 120), (110, 90, 150), (95, 55, 140), (40, 50, 130), (155, 65, 140) | 10 |
| Parameter | Symbol | Parameter Value |
|---|---|---|
| Threat source threat factor | 10,000 | |
| Height constraint weights | 0.3 | |
| Threat source constraint weights | 0.4 | |
| Energy constraint weights | 0.3 |
| Parameter | Symbol | Parameter Value |
|---|---|---|
| Threat source threat factor | 10,000 | |
| Height constraint weights | 0.2 | |
| Threat source constraint weights | 0.2 | |
| Energy constraint weights | 0.6 |
| Algorithm | Best Value | Worst Value | Average Value | Standard Deviation |
|---|---|---|---|---|
| PSO | 1919.86 | 2933.71 | 2445.83 | 343.75 |
| ABC | 2161.51 | 3118.46 | 2660.74 | 243.80 |
| AFSA | 2489.44 | 3349.52 | 2873.51 | 323.69 |
| SSA | 1804.47 | 2099.64 | 1954.81 | 93.51 |
| ISSA | 1777.53 | 2020.13 | 1900.73 | 83.11 |
| Algorithm | Best Value Error Percentage | Worst Value Error Percentage | Average Value Error Percentage |
|---|---|---|---|
| PSO | 8.01% | 45.22% | 28.68% |
| ABC | 21.60% | 54.37% | 39.99% |
| AFSA | 40.05% | 65.81% | 51.18% |
| SSA | 1.52% | 3.94% | 2.85% |
| Algorithm | Best Value | Worst Value | Average Value | Standard Deviation |
|---|---|---|---|---|
| PSO | 2818.51 | 3441.57 | 2975.58 | 135.79 |
| ABC | 3054.11 | 3793.68 | 3345.41 | 169.49 |
| AFSA | 3240.39 | 3781.73 | 3472.54 | 157.29 |
| SSA | 2762.27 | 3323.29 | 3015.51 | 132.24 |
| ISSA | 2777.45 | 3269.97 | 2908.54 | 122.14 |
| Algorithm | Best Value Error Percentage | Worst Value Error Percentage | Average Value Error Percentage |
|---|---|---|---|
| PSO | 1.48% | 5.25% | 2.30% |
| ABC | 9.96% | 16.02% | 15.02% |
| AFSA | 16.67% | 15.65% | 19.39% |
| SSA | −0.55% | 1.63% | 3.68% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Mao, J.; Yin, S.; Fu, L.; Wang, Y. Path Planning of Multi-Objective Underwater Robot Based on Improved Sparrow Search Algorithm in Complex Marine Environment. J. Mar. Sci. Eng. 2022, 10, 1695. https://doi.org/10.3390/jmse10111695
Li B, Mao J, Yin S, Fu L, Wang Y. Path Planning of Multi-Objective Underwater Robot Based on Improved Sparrow Search Algorithm in Complex Marine Environment. Journal of Marine Science and Engineering. 2022; 10(11):1695. https://doi.org/10.3390/jmse10111695
Chicago/Turabian StyleLi, Bin, Jianlin Mao, Shuyi Yin, Lixia Fu, and Yan Wang. 2022. "Path Planning of Multi-Objective Underwater Robot Based on Improved Sparrow Search Algorithm in Complex Marine Environment" Journal of Marine Science and Engineering 10, no. 11: 1695. https://doi.org/10.3390/jmse10111695
APA StyleLi, B., Mao, J., Yin, S., Fu, L., & Wang, Y. (2022). Path Planning of Multi-Objective Underwater Robot Based on Improved Sparrow Search Algorithm in Complex Marine Environment. Journal of Marine Science and Engineering, 10(11), 1695. https://doi.org/10.3390/jmse10111695