A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas

 , ,
, ,  , ,
, ,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
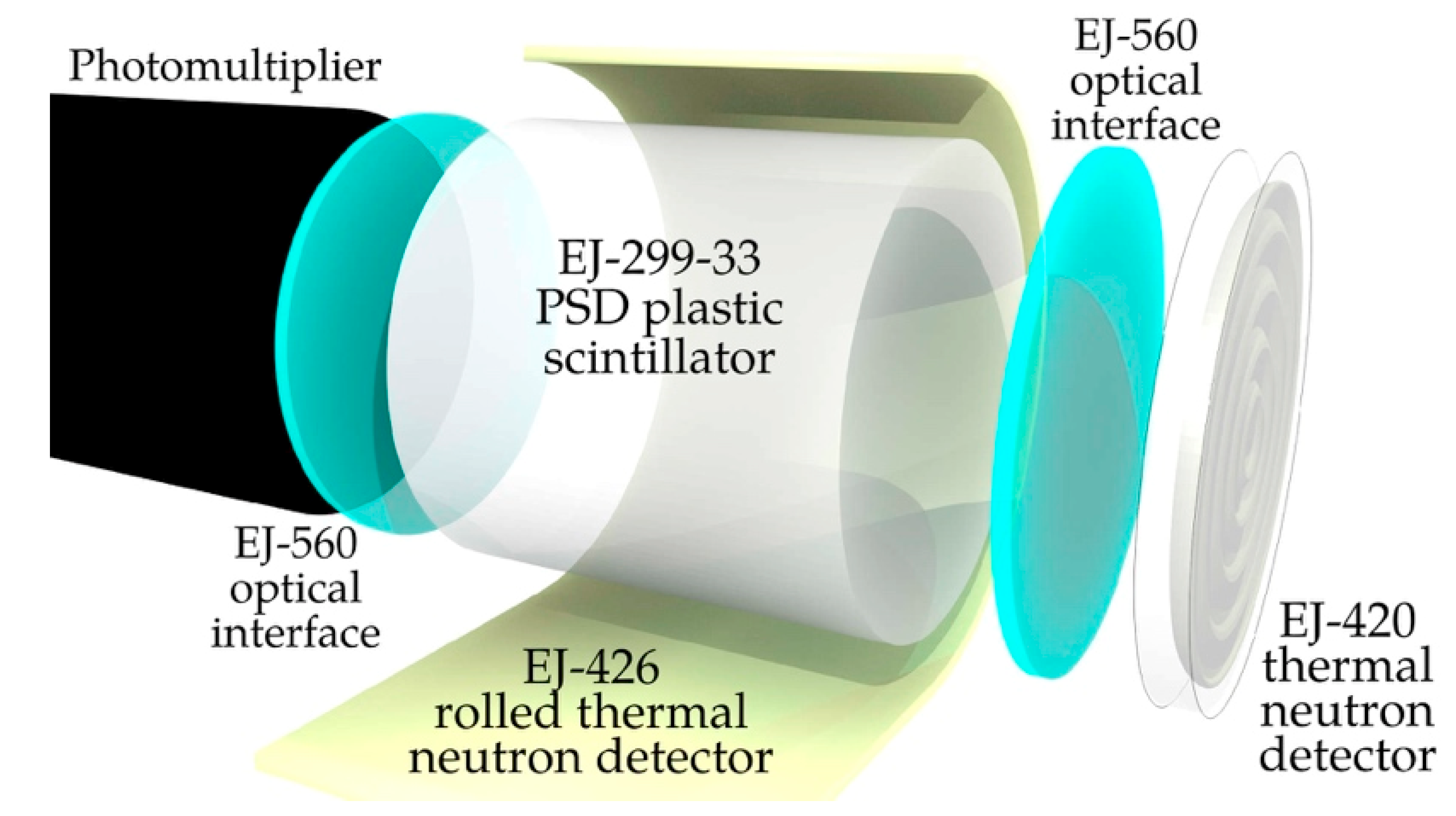
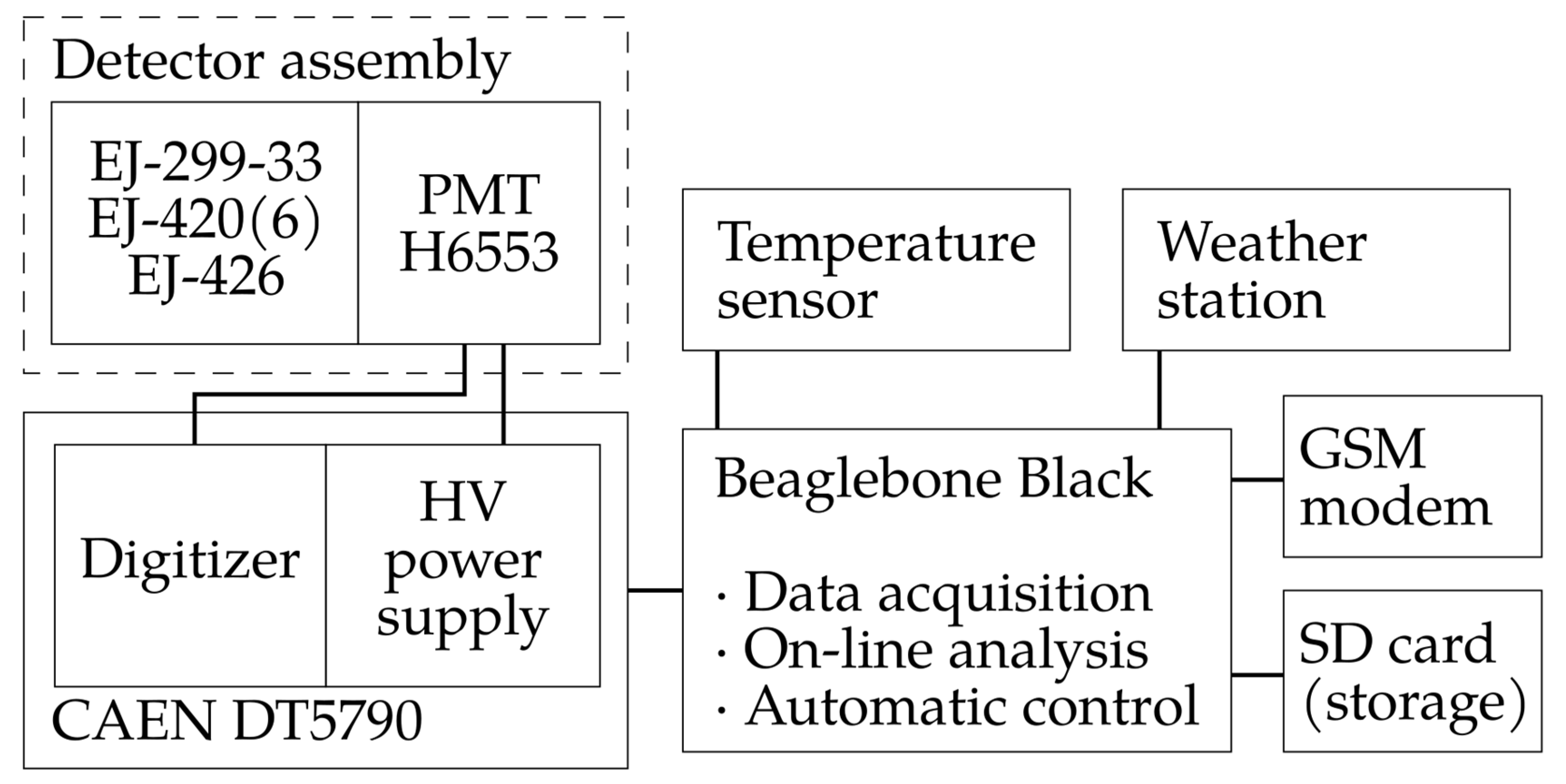
2.1. Instrumentation
2.2. Data Acquisition
2.3. Data Processing and Analysis
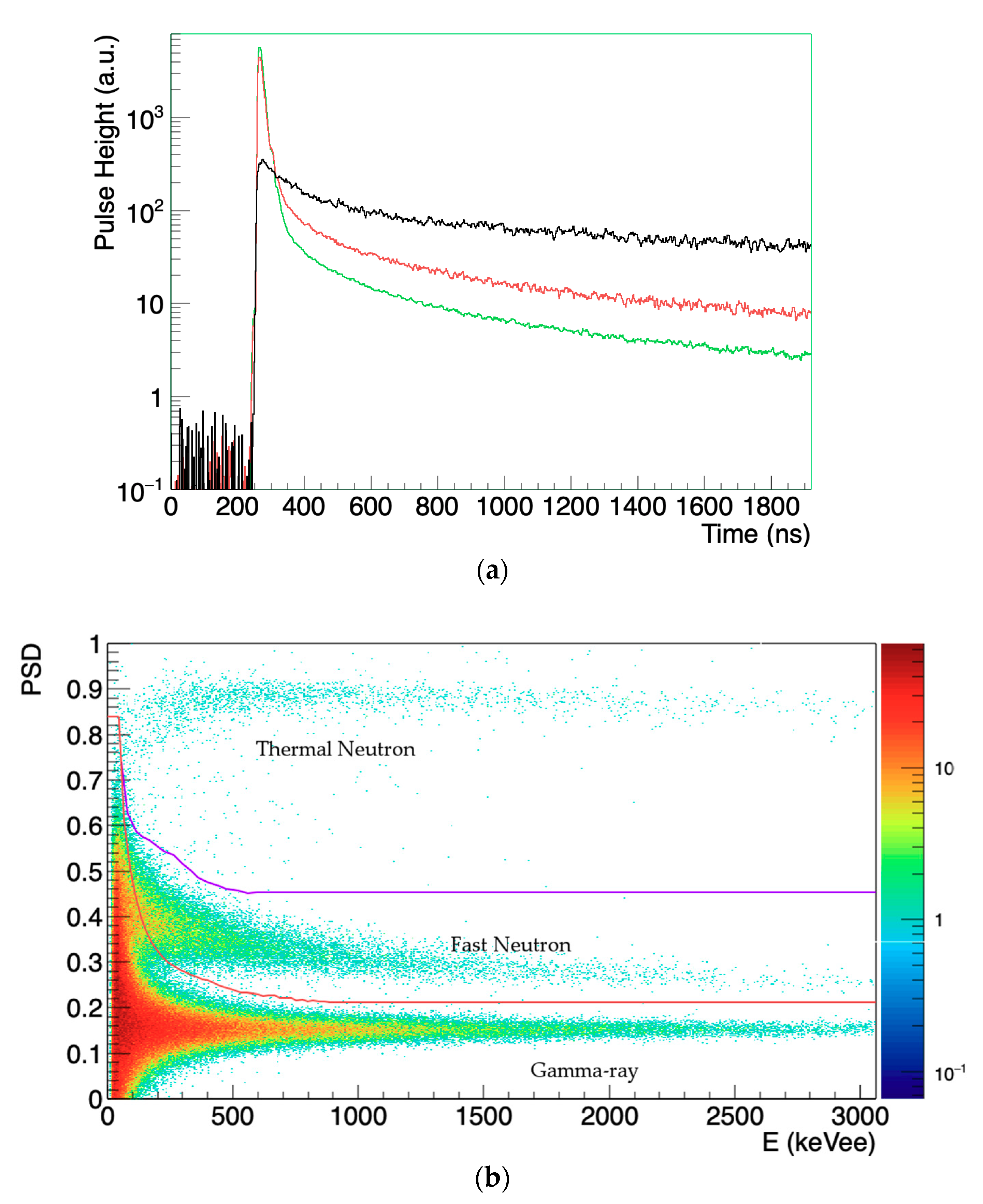
2.3.1. Particle Discrimination
2.3.2. From Raw Neutron Counts to Soil Moisture Estimation
3. Experimental Sites
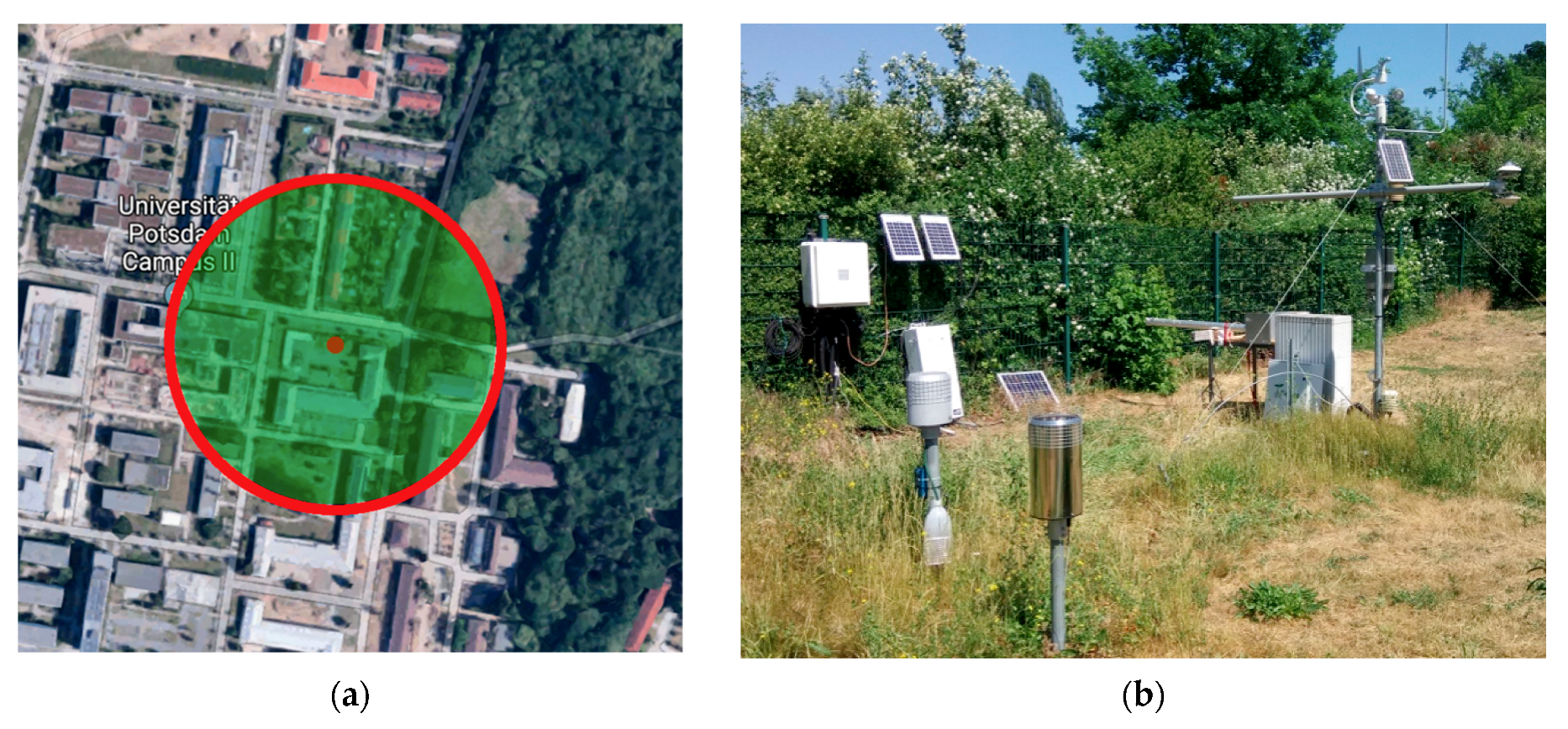
3.1. Potsdam, Germany
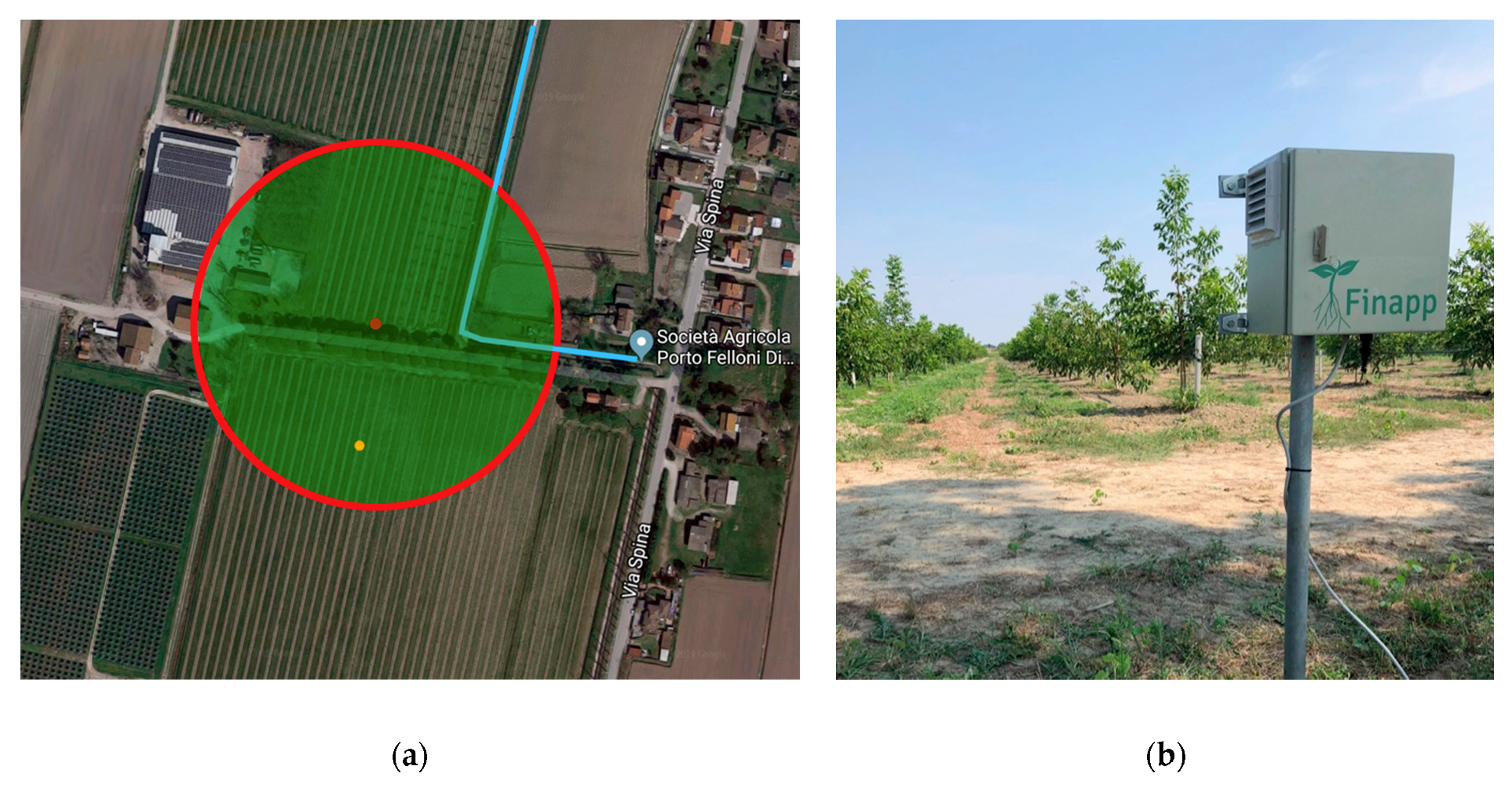
3.2. Lagosanto, Italy
4. Results
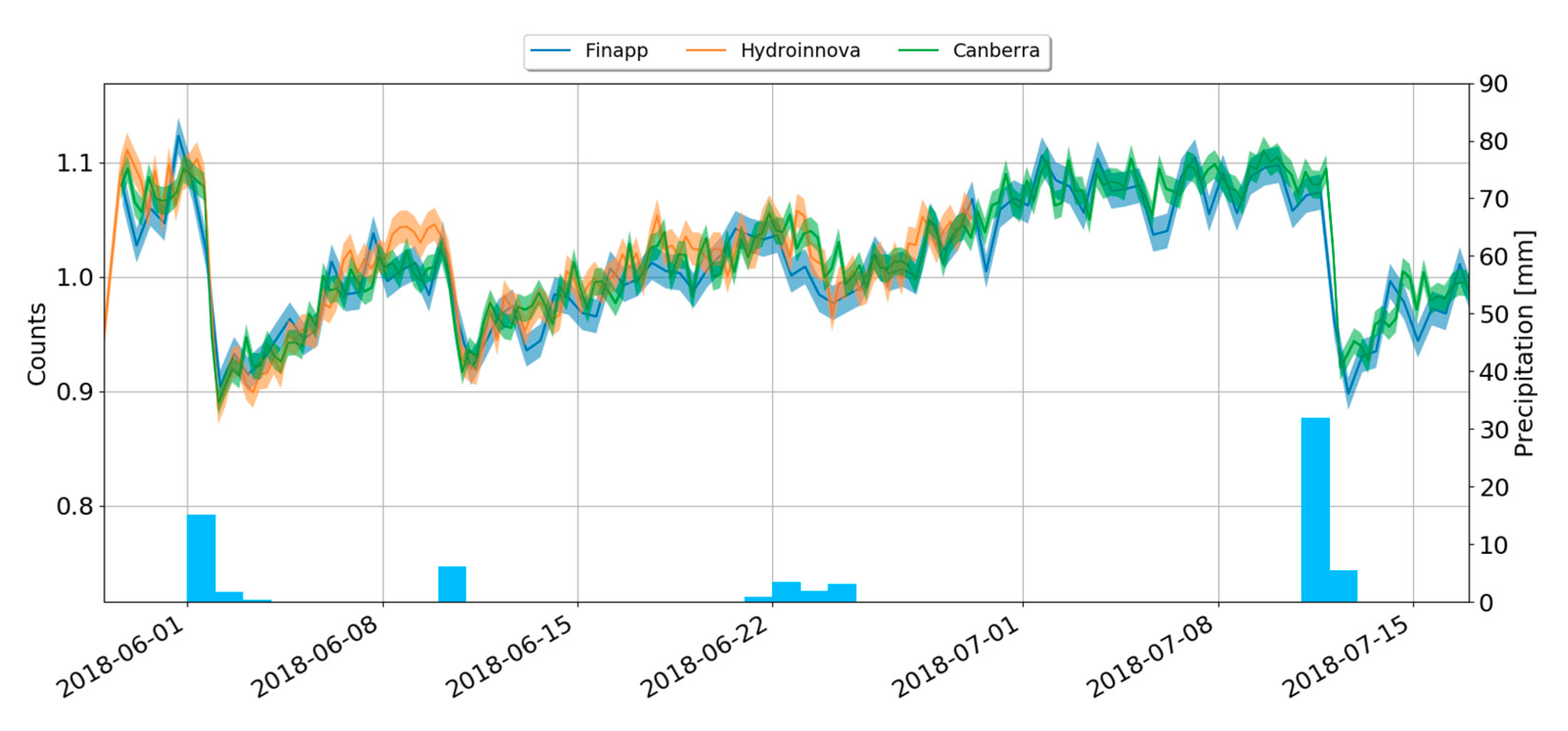
4.1. Potsdam Results
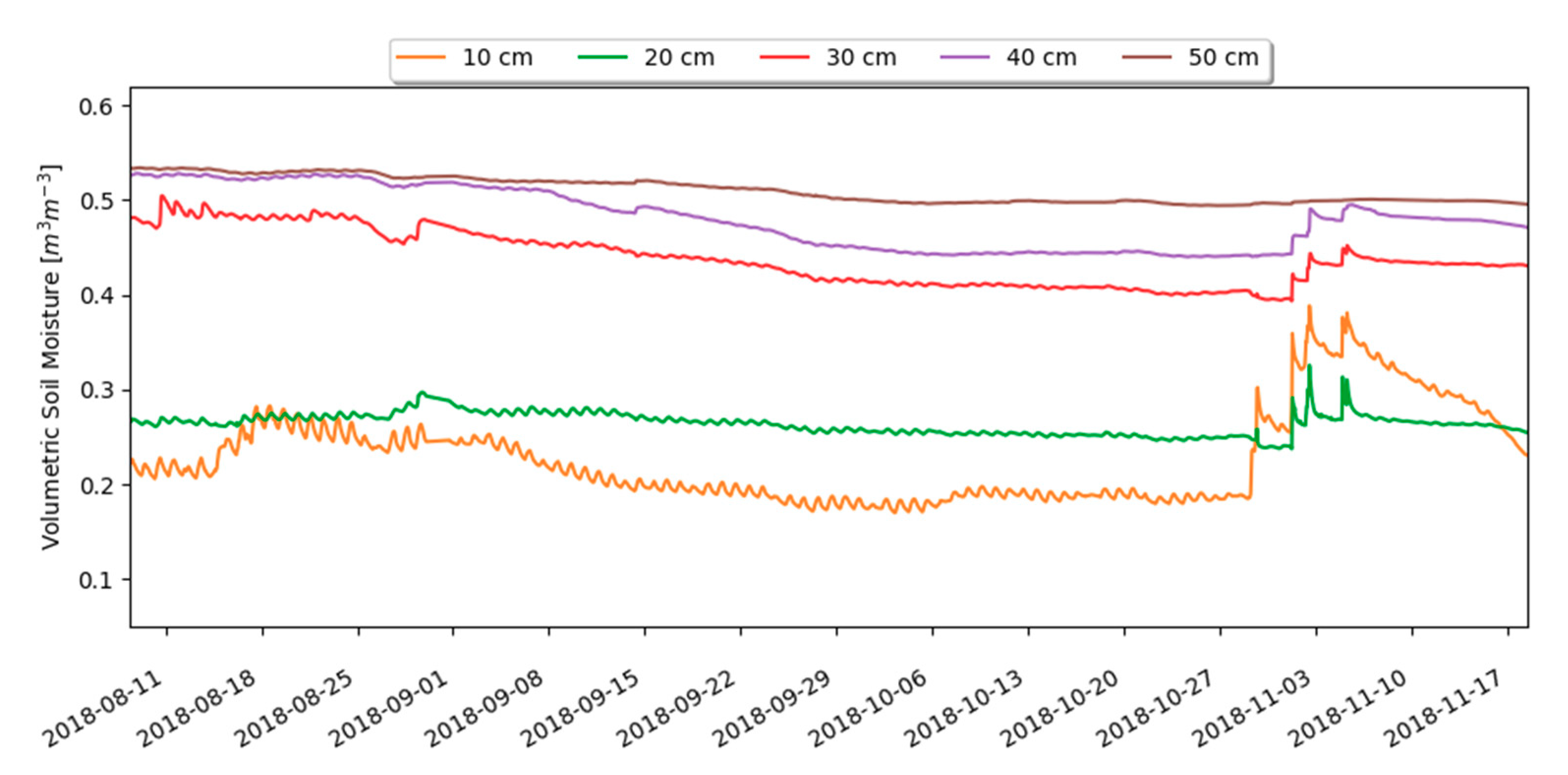
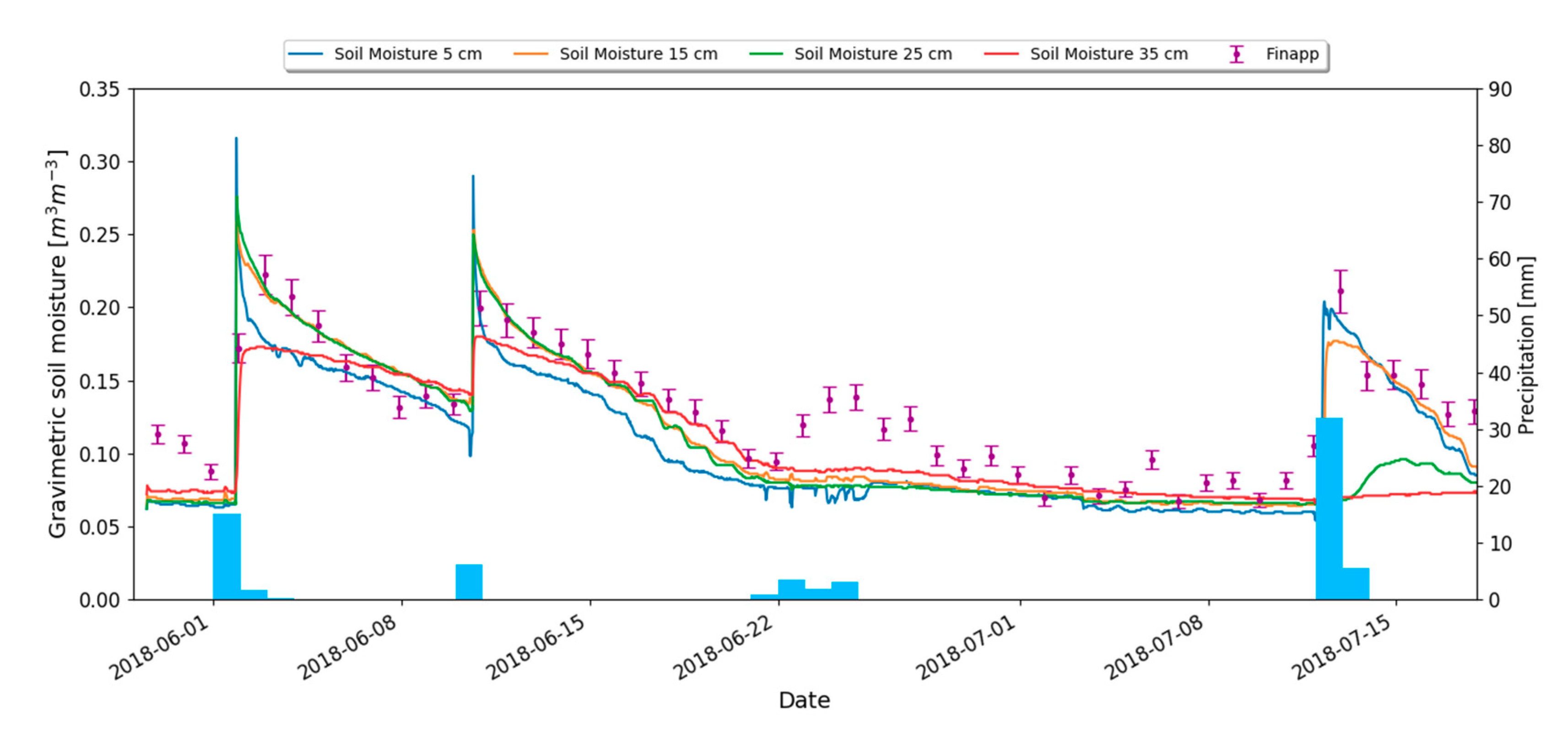
4.2. Lagosanto Results
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Food and Agriculture Organization (FAO). Introduction. In Water for Sustainable Food and Agriculture; FAO: Rome, Italy, 2017; p. 1. ISBN 978-92-5-109977-3. [Google Scholar]
- Corradini, C. Soil moisture in the development of hydrological processes and its determination at different spatial scales. J. Hydrol. 2014, 516, 1–5. [Google Scholar] [CrossRef]
- Ochsner, T.E.; Cosh, M.H.; Cuenca, R.H.; Dorigo, W.A.; Draper, C.S.; Hagimoto, Y.; Kerr, Y.H.; Njoku, E.G.; Small, E.E.; Zreda, M. State of the Art in Large-Scale Soil Moisture Monitoring. Soil Sci. Soc. Am. J. 2013, 77, 1888–1919. [Google Scholar] [CrossRef] [Green Version]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil Moisture Measurement for Ecological and Hydrological Watershed-Scale Observatories: A Review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Romano, N. Soil moisture at local scale: Measurements and simulations. J. Hydrol. 2014, 516, 6–20. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward Global Soil Moisture Monitoring with Sentinel-1: Harnessing Assets and Overcoming Obstacles. IEEE Trans. Geosci. Remote Sens. 2018, 57, 520–539. [Google Scholar] [CrossRef]
- Susha Lekshmi, S.U.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Measurement 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Famiglietti, J.S.; Deveraux, J.A.; Laymon, C.A.; Tsegaye, T.; Houser, P.R.; Jackson, T.J.; Graham, S.T.; Rodell, M.; van Oevelen, P.J. Ground-based investigation of soil moisture variability within remote sensing footprints During the Southern Great Plains 1997 (SGP97) Hydrology Experiment. Water Resour. Res. 1998, 35, 1839–1852. [Google Scholar] [CrossRef]
- Famiglietti, J.S.; Ryu, D.; Berg, A.A.; Rodell, M.; Jackson, T.J. Field observations of soil moisture variability across scales. Water Resour. Res. 2008, 44, W01423. [Google Scholar] [CrossRef]
- Western, A.W.; Grayson, R.B.; Bioshl, G. Scaling of Soil Moisture: A Hydrologic Perspective. Annu. Rev. Earth Planet. Sci. 2002, 30, 149–180. [Google Scholar] [CrossRef] [Green Version]
- Zhuo, L.; Han, D. The Relevance of Soil Moisture by Remote Sensing and Hydrological Modelling. Procedia Eng. 2016, 154, 1368–1375. [Google Scholar] [CrossRef] [Green Version]
- Petropoulos, G.P.; Ireland, G.; Barrett, B. Surface soil moisture retrievals from remote sensing: Current status, products & future trends. Phys. Chem. Earth 2015, 83, 35–56. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; Houser, P.; Spencer, M.; Doiron, T.; Kim, Y.; Smith, J.; Girard, R.; Belair, S.; Crow, W.; et al. The Hydrosphere State (Hydros) Satellite Mission: An Earth System Pathfinder for Global Mapping of Soil Moisture and Land Freeze/Thaw. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2184–2195. [Google Scholar] [CrossRef]
- Wanders, N.; Karssenberg, D.; Bierkens, M.; Parinussa, R.; de Jeu, R.; van Dam, J.; de Jong, S. Observation uncertainty of satellite soil moisture products determined with physically-based modeling. Remote Sens. Environ. 2012, 127, 341–356. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V. Soil moisture at watershed scale: Remote sensing techniques. J. Hydrol. 2014, 516, 258–272. [Google Scholar] [CrossRef]
- Zreda, M.; Desilets, D.; Ferré, T.; Scott, R. Measuring soil moisture content non-invasively at intermediate spatial scale using cosmic-ray neutrons. Geophys. Res. Lett. 2008, 35, L21402. [Google Scholar] [CrossRef]
- Zreda, M.; Shuttleworth, W.; Zeng, X.; Zweck, C.; Desilets, D.; Franz, T.; Rosolem, R. COSMOS: The COsmic-ray Soil Moisture Observing. Hydrol. Earth Syst. Sci. 2012, 16, 4079–4099. [Google Scholar] [CrossRef]
- Franz, T.E.; Zreda, M.; Rosolem, R.; Ferre, T.P.A. Field Validation of a Cosmic-Ray Neutron Sensor Using a Distributed Sensor Network. Vadose Zone J. 2012, 11. [Google Scholar] [CrossRef]
- Desilets, D.; Zreda, M. Footprint diameter for a cosmic-ray soil moisture probe: Theory and Monte Carlo simulations. Water Resour. Res. 2013, 49, 3566–3575. [Google Scholar] [CrossRef]
- Kohli, M.; Schron, M.; Zreda, M.; Schmidt, U.; Dietrich, P.; Zacharias, S. Footprint characteristics revised for field-scale soil moisture monitoring with cosmic-ray neutrons. Water Resour. Res. 2015, 51, 5772–5790. [Google Scholar] [CrossRef]
- Desilets, D.; Zreda, M.; Ferré Ty, P.A. Nature’s neutron probe: Land surface hydrology at an elusive scale with cosmic rays. Water Resour. Res. 2010, 46, W11505. [Google Scholar] [CrossRef]
- Villarreyes, R.C.; Baroni, G.; Oswald, S. Integral quantification of seasonal soil moisture changes in farmland by cosmic-ray neutrons. Hydrol. Earth Syst. Sci. 2011, 15, 3843–3859. [Google Scholar] [CrossRef] [Green Version]
- Evans, J.G.; Ward, H.C.; Blake, J.R.; Hewitt, E.J.; Morrison, R.; Fry, M.; Ball, L.A.; Doughty, L.C.; Libre, J.W.; Hitt, O.E.; et al. Soil water content in southern England derived from a cosmic-ray soil moisture observing system—COSMOS-UK. Hydrol. Process. 2016, 30, 4987–4999. [Google Scholar] [CrossRef]
- Baatz, R.; Bogena, H.R.; Franssen, H.-J.H.; Huisman, J.A.; Montzka, C.; Vereecken, H. An empirical vegetation correction for soil water content quantification using cosmic ray probes. Water Resour. Res. 2015, 51, 2030–2046. [Google Scholar] [CrossRef] [Green Version]
- Andreasen, M.; Jensen, H.K.; Zreda, M.; Desilets, D.; Bogena, H.; Looms, C.M. Modeling cosmic ray neutron field measurements. Water Resour. Res. 2016, 52, 6451–6471. [Google Scholar] [CrossRef] [Green Version]
- Holgate, C.M.; De Jeu, R.A.M.; van Dijk, A.I.J.M.; Liu, Y.Y.; Renzullo, L.J.; Kumar, V.; Dharssi, I.; Parinussa, R.M.; Van Der Schalie, R.; Gevaert, A.; et al. Comparison of remotely sensed and modelled soil moisture data sets across Australia. Remote Sens. Environ. 2016, 186, 497–500. [Google Scholar] [CrossRef]
- Montzka, C.; Bogena, H.; Zreda, M.; Monerris, A.; Morrison, R.; Muddu, S.; Vereecken, H. Validation of Spaceborne and Modelled Surface Soil Moisture Products with Cosmic-Ray Neutron Probes. Remote Sens. 2017, 9, 103. [Google Scholar] [CrossRef]
- Schrön, M.; Rosolem, R.; Köhli, M.; Piussi, L.; Schröter, I.; Iwema, J.; Kögler, S.; Oswald, S.E.; Wollschläger, U.; Samaniego, L.; et al. Cosmic-ray Neutron Rover Surveys of Field Soil Moisture and the Influence of Roads. Water Resour. Res. 2018, 54, 6441–6459. [Google Scholar] [CrossRef]
- Mavromichalaki, H.; Papaioannou, A.; Plainaki, C.; Sarlanis, C.; Souvatzoglou, G.; Gerontidou, M.; Papailiou, M.; Eroshenko, E.; Belov, A.; Yanke, V.; et al. Applications and usage of the real-time Neutron Monitor Database. Adv. Space Res. 2011, 47, 2210–2222. [Google Scholar] [CrossRef]
- Kouzes, R. The 3He Supply Problem; PNNL-18388; Pacific Northwest National Laboratory: Richland, WA, USA, 2009.
- Cester, D.; Lunardon, M.; Moretto, S.; Nebbia, G.; Pino, F.; Sajo-Bohus, L.; Stevanato, L.; Bonesso, I.; Turato, F. A novel detector assembly for detecting thermal neutrons, fast neutrons and gamma rays. Nucl. Instrum. Methods A 2016, 830, 191–196. [Google Scholar] [CrossRef]
- Pino, F.; Stevanato, L.; Cester, D.; Nebbia, G.; Sajo-Bohus, L.; Viesti, G. Study of the thermal neutron detector ZnS(Ag)/LiF response using digital pulse processing. J. Instrum. 2015, 10, T08005. [Google Scholar] [CrossRef]
- Cester, D.; Nebbia, G.; Stevanato, L.; Pino, F.; Viesti, G. Experimental tests of the new plastic scintillator with pulse shape discrimination capabilities EJ-299-33. Nucl. Instrum. Methods A 2014, 735, 202–206. [Google Scholar] [CrossRef]
- Fontana, C.L. A distributed data acquisition system for signal digitizers with on-line analysis capabilities. In Proceedings of the IEEE Nuclear Science Symposium and Medical Imaging Conference, Atlanta, GA, USA, 21–28 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Fontana, C.L. A distributed data acquisition system for nuclear detectors. Int. J. Mod. Phys. Conf. Ser. 2018, 48, 1860118. [Google Scholar] [CrossRef]
- Sardet, A.; Pérot, B.; Carasco, C.; Sannié, G.; Moretto, S.; Nebbia, G.; Fontana, C.; Moszyński, M.; Sibczyński, P.; Grodzicki, K.; et al. Design of the rapidly relocatable tagged neutron inspection system of the C-BORD project. In Proceedings of the IEEE Nuclear Science Symposium, Medical Imaging Conference and Room-Temperature Semiconductor Detector Workshop, Strasbourg, France, 29 October–5 November 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Sibczynski, P.; Dziedzic, A.; Grodzicki, K.; Iwanowska-Hanke, J.; Mianowska, Z.; Moszyñski, M.; Swiderski, L.; Syntfeld-Każuch, A.; Szawłowski, M.; Wolski, D.; et al. C-BORD—An overview of efficient toolbox for high-volume freight inspection. In Proceedings of the IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Atlanta, GA, USA, 21–28 October 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Fontana, C.L. A Distributed Data Acquisition System for the Sensor Network of the TAWARA_RTM Project. Phys. Procedia 2017, 90, 271–278. [Google Scholar] [CrossRef]
- Cester, D.; Lunardon, M.; Nebbia, G.; Stevanato, L.; Viesti, G.; Petrucci, S.; Tintori, C. Pulse shape discrimination with fast digitizers. Nucl. Instrum. Methods A 2014, 748, 33–38. [Google Scholar] [CrossRef]
- Schrön, M.; Zacharias, S.; Womack, G.; Köhli, M.; Desilets, D.; Oswald, S.E.; Bumberger, J.; Mollenhauer, H.; Kögler, S.; Remmler, P.; et al. Intercomparison of cosmic-ray neutron sensors and water balance monitoring in an urban environment. Geosci. Instrum. Methods Data Syst. 2018, 7, 83–99. [Google Scholar] [CrossRef] [Green Version]
- Bogena, H.R.; Huisman, J.A.; Baatz, R.; Hendricks Franssen, H.-J.; Vereecken, H. Accuracy of the cosmic-ray soil water content probe in humid forest ecosystems: The worst case scenario. Water Resour. Res. 2013, 49, 5778–5791. [Google Scholar] [CrossRef] [Green Version]
- Baroni, G.; Oswald, S.E. A scaling approach for the assessment of biomass changes and rainfall interception using cosmic-ray neutron sensing. J. Hydrol. 2015, 525, 264–276. [Google Scholar] [CrossRef]
- Franz, T.E.; Zreda, M.; Ferre, T.P.A.; Rosolem, R.; Zweck, C.; Stillman, S.; Zeng, X.; Shuttleworth, W.J. Measurement depth of the cosmic ray soil moisture probe affected by hydrogen from various sources. Water Resour. Res. 2012, 48, W08515. [Google Scholar] [CrossRef]
- Carturan, S.M.; Vesco, M.; Bonesso, I.; Quaranta, A.; Maggioni, G.; Stevanato, L.; Zanazzi, E.; Marchi, T.; Fabris, D.; Cinausero, M.; et al. Flexible scintillation sensors for the detection of thermal neutrons based on siloxane 6LiF containing composites: Role of 6LiF crystals size and dispersion. Nucl. Instrum. Methods A 2019, 925, 109–115. [Google Scholar] [CrossRef]
- Baldoncini, M.; Albéri, M.; Bottardi, C.; Chiarelli, E.; Raptis, K.G.C.; Strati, V.; Mantovani, F. Investigating the potentialities of Monte Carlo simulation for assessing soil water content via proximal gamma-ray spectroscopy. J. Environ. Radioact. 2018, 192, 105–116. [Google Scholar] [CrossRef] [Green Version]
- Baldoncini, M.; Albéri, M.; Bottardi, C.; Chiarelli, E.; Raptis, K.G.C.; Strati, V.; Mantovani, F. Biomass water content effect on soil moisture assessment via proximal gamma-ray spectroscopy. Geoderma 2018, 335, 67–77. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loam | Sand | Clay | Organic Matter | ρbulk |
|---|---|---|---|---|
| 42.1% | 38.5% | 19.4% | 2.1% | 1.4 g/cm3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stevanato, L.; Baroni, G.; Cohen, Y.; Fontana, C.L.; Gatto, S.; Lunardon, M.; Marinello, F.; Moretto, S.; Morselli, L. A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas. Agriculture 2019, 9, 202. https://doi.org/10.3390/agriculture9090202
Stevanato L, Baroni G, Cohen Y, Fontana CL, Gatto S, Lunardon M, Marinello F, Moretto S, Morselli L. A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas. Agriculture. 2019; 9(9):202. https://doi.org/10.3390/agriculture9090202
Chicago/Turabian StyleStevanato, Luca, Gabriele Baroni, Yafit Cohen, Cristiano Lino Fontana, Simone Gatto, Marcello Lunardon, Francesco Marinello, Sandra Moretto, and Luca Morselli. 2019. "A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas" Agriculture 9, no. 9: 202. https://doi.org/10.3390/agriculture9090202
APA StyleStevanato, L., Baroni, G., Cohen, Y., Fontana, C. L., Gatto, S., Lunardon, M., Marinello, F., Moretto, S., & Morselli, L. (2019). A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas. Agriculture, 9(9), 202. https://doi.org/10.3390/agriculture9090202