2.1. Site Descriptions
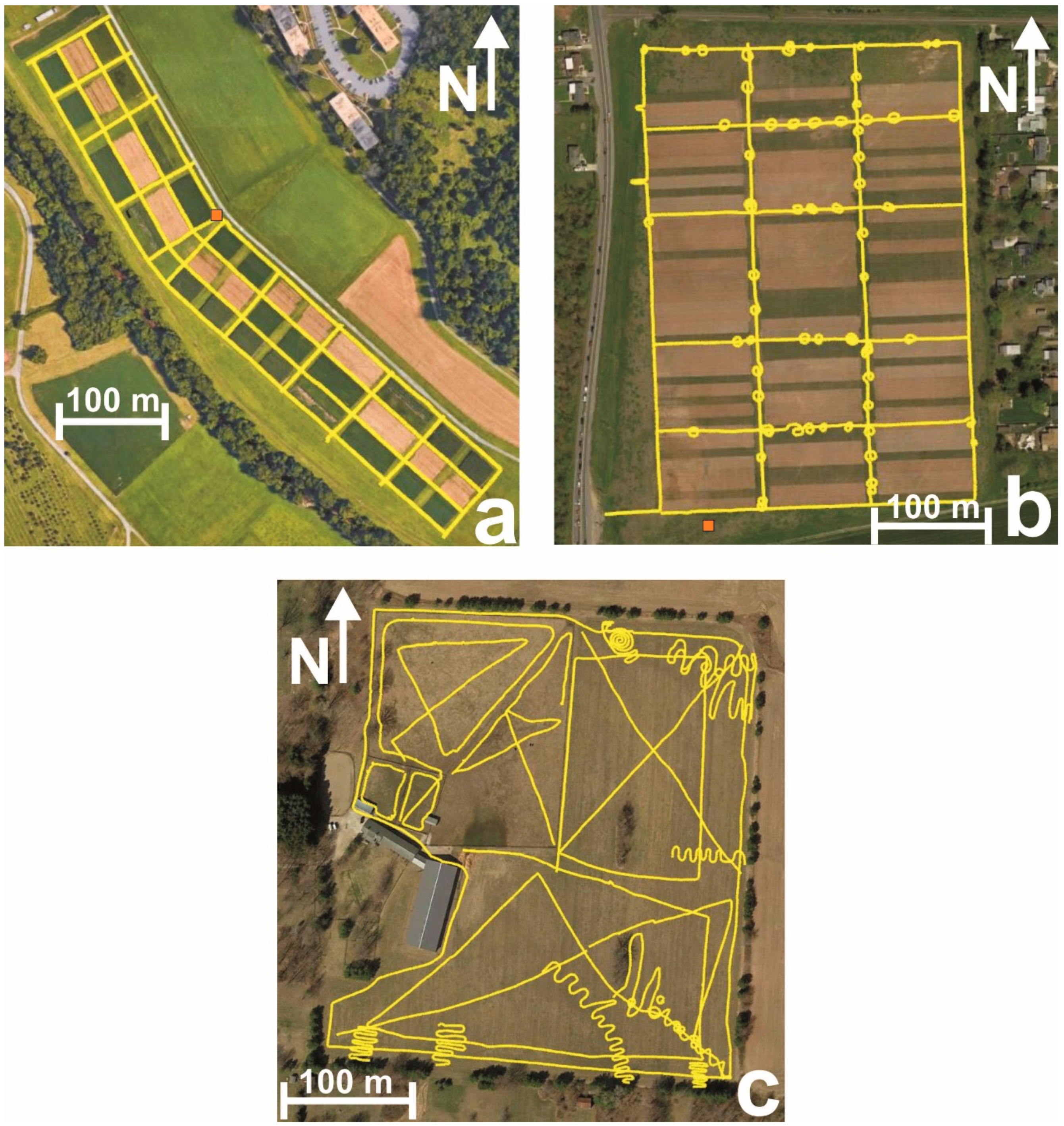
Testing of GPR integrated with an RTK/GNSS for drainage pipe mapping was carried out at three agricultural field sites. Two of the sites are located in Beltsville, MD, USA, and the third site is near Columbus, OH, USA. Aerial images of the three sites, with soil map overlays, are shown in
Figure 2.
Note: Throughout this article, aerial images obtained via Google Earth (Google LLC., Mountain View, CA, USA). were used as a base map to overlay soils and GPR information. Soil map overlays were obtained via the SoilWeb Earth App (UC Davis, California Soil Resource Lab, Davis, CA, USA). Descriptions for each test site are provided as follows.
2.1.1. Site 1 (Latitude: 39.012555, Longitude: −76.940204)
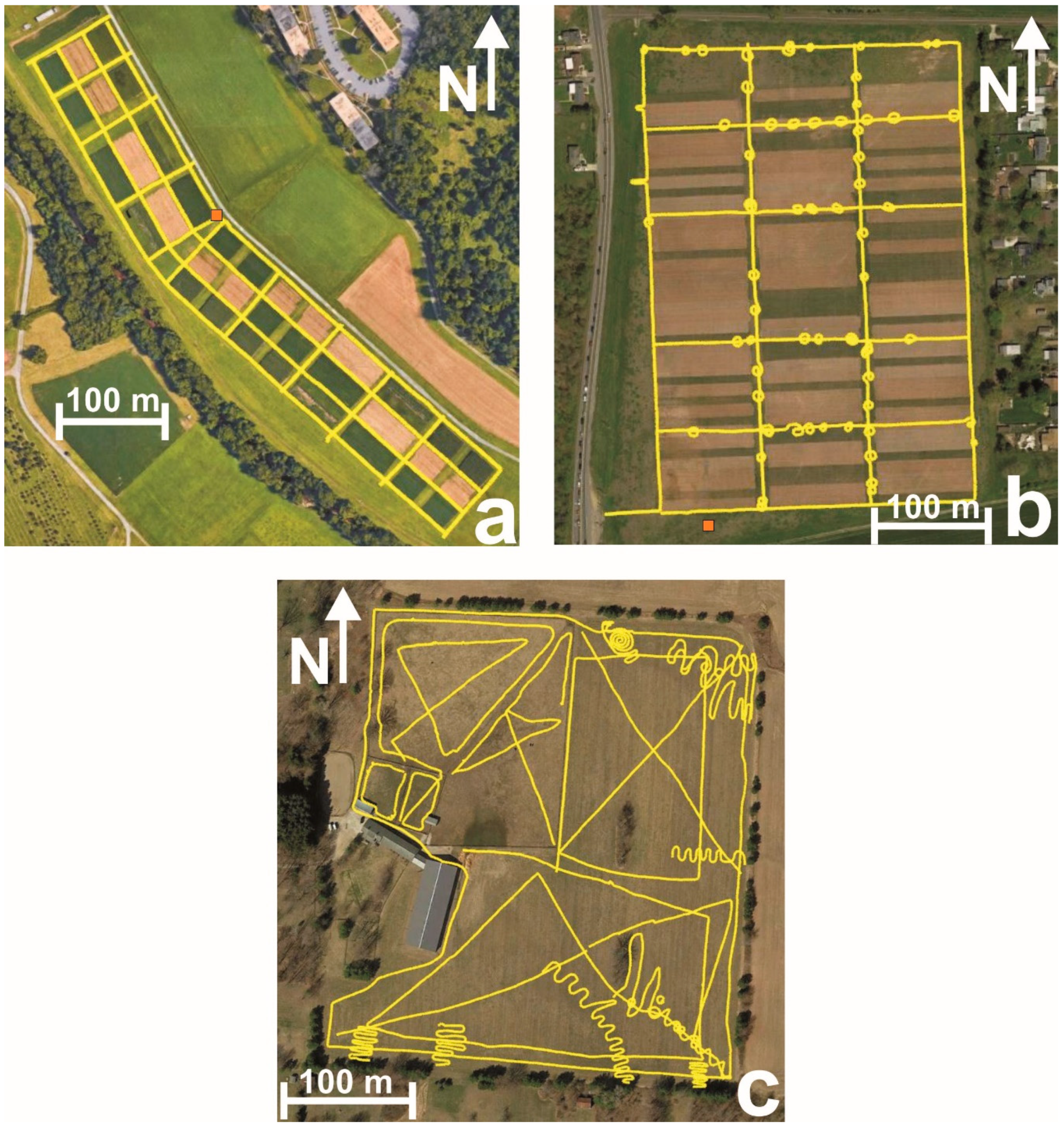
Site 1 is located at the U.S. Department of Agriculture (USDA)—Agricultural Research Service (ARS)—Beltsville Agricultural Research Center (BARC). Site 1 is comprised of numerous small experiment plots (
Figure 2a). The total area of this agricultural field is 5.6 ha. Cordorus and Hatboro soils, CF, cover Site 1. Both the Cordorus (
mesic Fluvaquentic Dystrudept) and Hatboro (
mesic Fluvaquentic Endoaquept) are classified as loams.
2.1.2. Site 2 (Latitude: 39.025426, Longitude: −76.899118)
Site 2 is also located at BARC and is approximately 4 km northeast of Site 1. Site 2, as with site 1, is comprised of numerous small experiment plots (
Figure 2b). The total area of the Site 2 agricultural field is 11.3 ha. The soils that cover Site 2 include Elkton silt loam, EkA, (
mesic Typic Endoaquults), Hammonton loamy sand, HaA, (
mesic Aquic Hapludults), Russett—Christiana complex, RcA or RcB, (Russett loam—
mesic Aquic Hapludults, Christiana—
mesic Aquic Hapludults), and Udorthents, UdgB, (reclaimed gravel pits). Udorthents cover only a very small part of Site 2, just in the southwest corner.
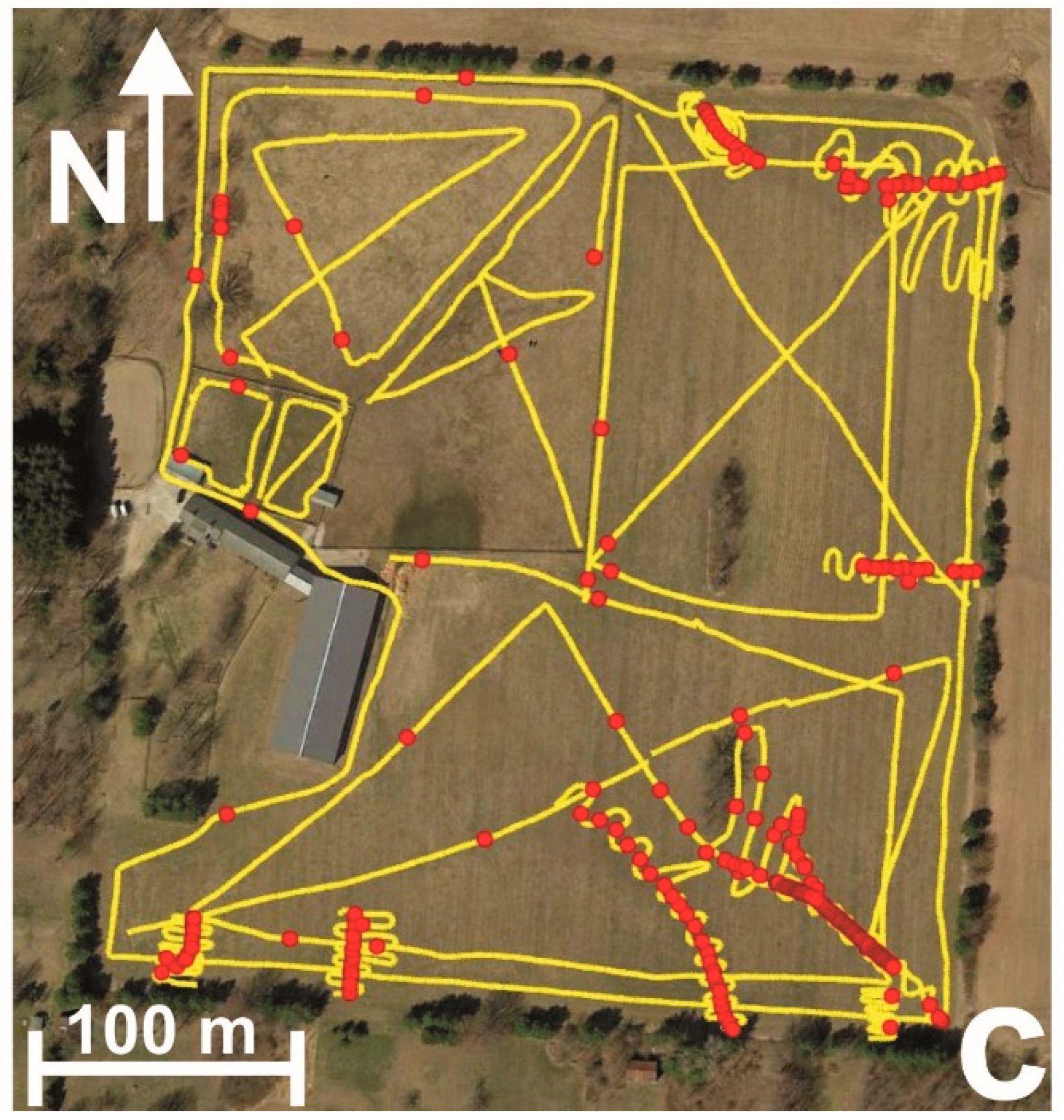
2.1.3. Site 3 (Latitude: 40.029482, Longitude: −82.727897)
Site 3 is a horse boarding, riding, and training facility located near Columbus, Ohio. The northeastern portion of the site has fenced-in areas for horses to exercise and graze (
Figure 2c). The building structures contain offices, boarding stalls, and an indoor riding area. A large hay field is present within southern and western portions of the site. The total area of Site 3 is 13.0 ha. The soils in this agricultural setting include Bennington silt loam, BeB, (
mesic Aeric Epiaqualfs), Cardington silt loam, Crd1B1, (
mesic Aquic Hapludalfs), and Pewamo silty clay loam, Pe, (
mesic Typic Argiaquolls).
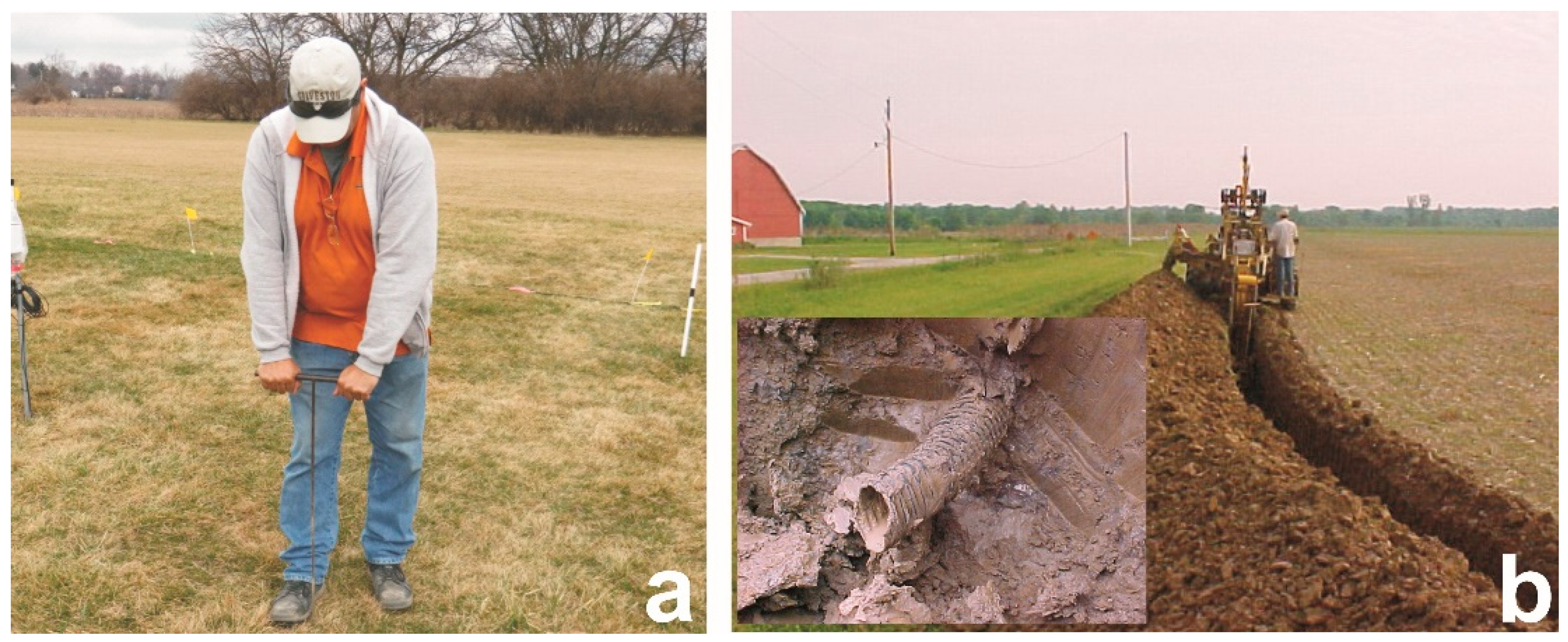
2.2. Equipment
A Sensors & Software Inc. (Mississagua, ON, Canada) Noggin
® GPR system having 250 MHz antennas (
Figure 3a,c) was employed to detect buried drainage pipes. The antennas used were shielded and had a frequency range from 125 to 375 MHz, with a center frequency of 250 MHz. Previous research [
3,
4,
5,
6,
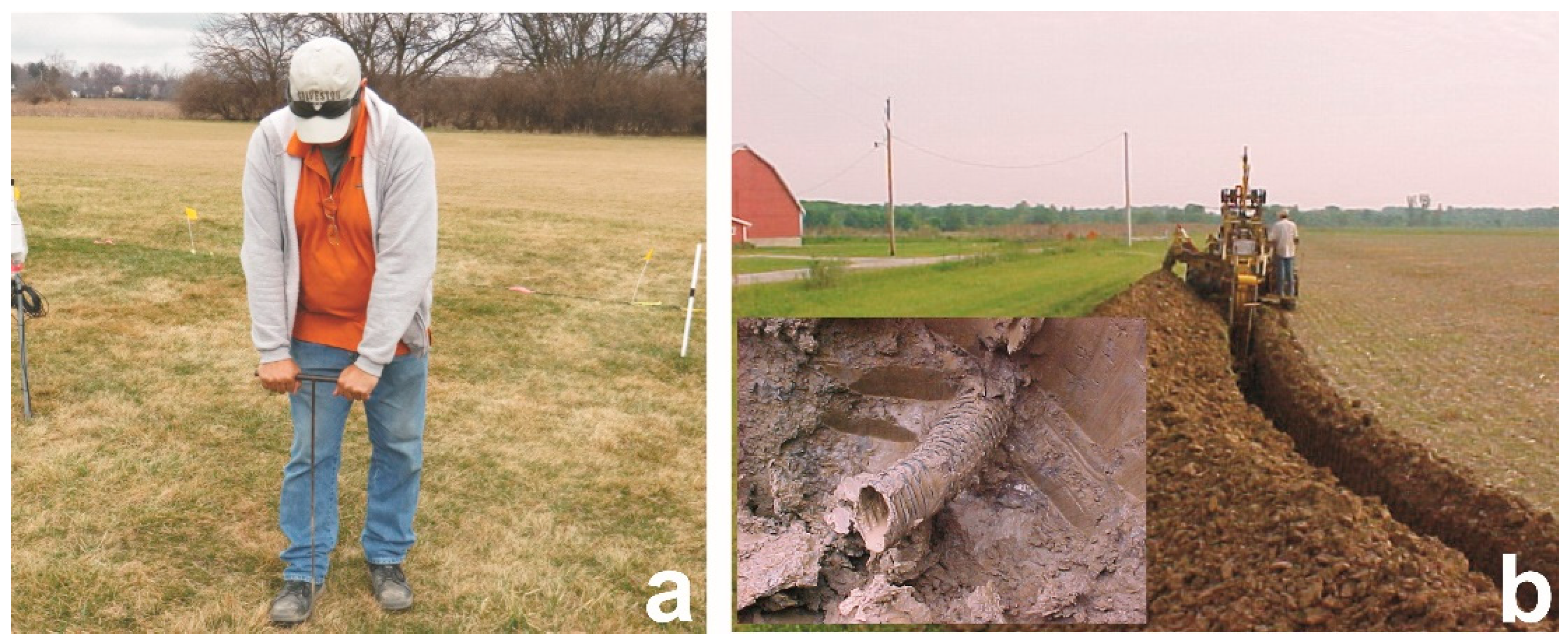
7] indicated that 250 MHz center frequency antennas worked best for finding clay tile and CPT drainage pipes in agricultural settings. Integration of RTK/GNSS with the GPR system allowed accurate latitude and longitude coordinates to be obtained at field locations where potential drainage pipes were detected. In order to obtain RTK/GNSS coordinates at Sites 1 and 2, a Topcon Corporation (Itabashi, Japan) GNSS (Global Positioning System—GPS and Globalnaya Navigazionnaya Sputnikovaya Sistema—GLONASS) FC-200 rover receiver (
Figure 3a) and Topcon Corporation GNSS (GPS and GLONASS) HiPer XT base station receiver (
Figure 3b) were utilized. At Site 3, a Topcon Corporation GRS-1 dual-frequency, GNSS (GPS and GLONASS) rover receiver and Topcon Corporation PG-S1 hand-held controller were employed together (
Figure 3c) with a virtual base station set-up through the Ohio Department of Transportation’s (ODOT) network of Continuously Operating Reference Stations (CORS) [
8]. Time domain reflectometry (TDR) soil water content values were collected using a Spectrum Technologies, Inc. (East Plainfield, Illinois) Field Scout TDR-300 with 20 cm waveguides (
Figure 3d). The TDR water content measurements were utilized to determine soil dielectric constant values [
9], that in turn were used to calculate preliminary soil radar velocities [
10,
11], which were then employed to convert GPR two-way travel times to depth values.
2.3. Field Data Collection
Almost all of the GPR-RTK/GNSS data for Site 1 was collected on 5 April 2017, with just a few additional short GPR transects carried out on 24 January 2018. All GPR-RTK/GNSS data for Site 2 was obtained on 25 January 2018. For Site 3, linear GPR transects were completed on 6 November 2017, followed by the spiral/serpentine GPR transects on 5 February 2018. At each site, between four to six hours total was needed to complete the GPR-RTK/GNSS surveys. The GPR equipment settings included a 5 cm distance between signal trace measurement points along a transect (i.e., station interval = 5 cm). At each measurement point on the GPR transect, 16 signal traces were collected and averaged (i.e., stacking = 16). The GPR two-way travel time for each signal trace was set to provide a depth of investigation of 1.5 m (Site 3) or 2.0 m (Sites 1 and 2). The GPR signal trace two-way travel time needed to achieve 1.5 m or 2.0 m investigations depths were calculated from soil radar velocity values based on TDR measurements.
One main component of the Noggin
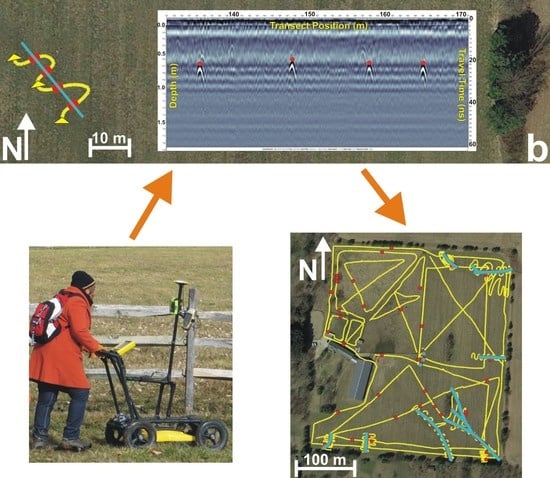
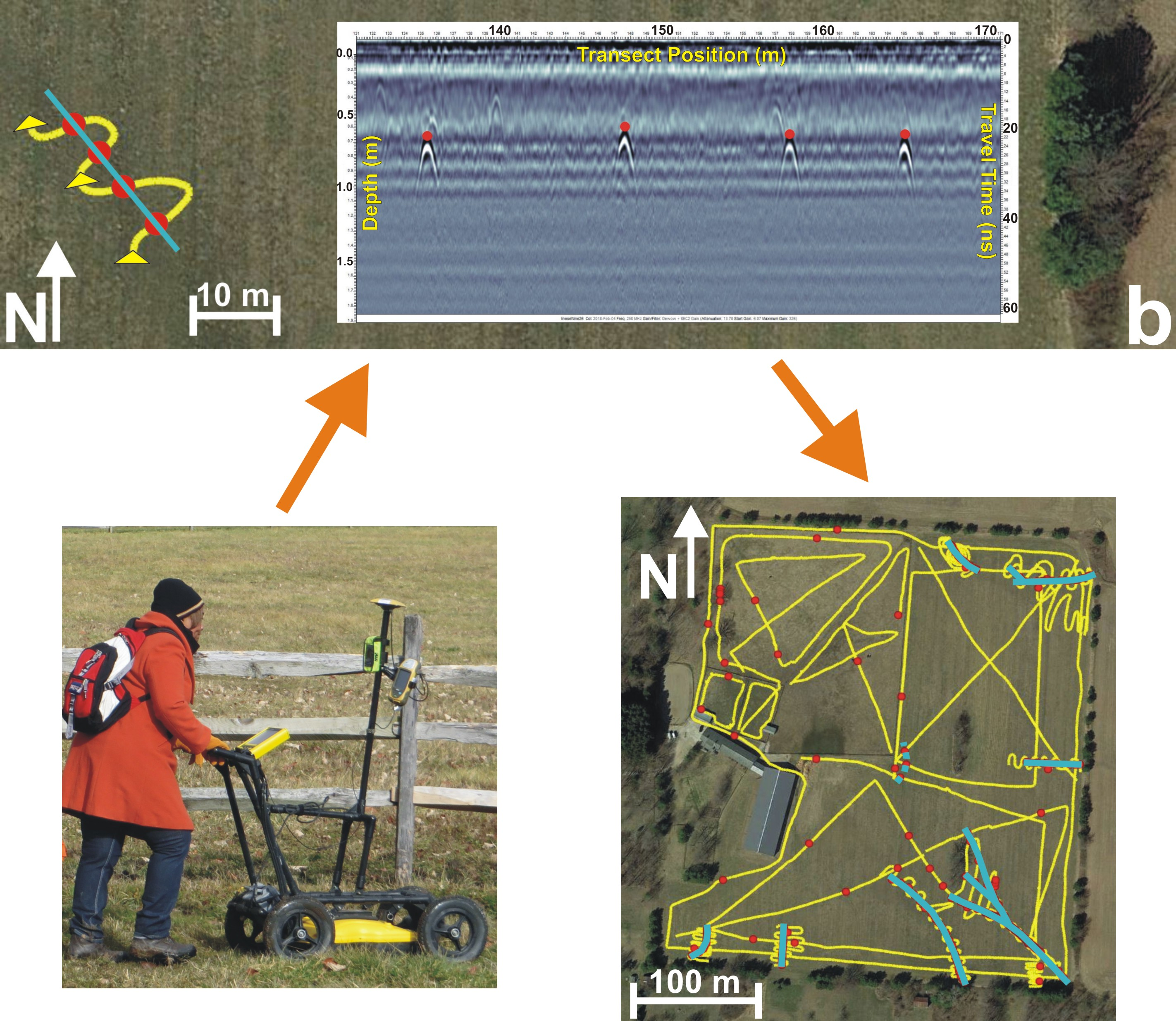
® GPR unit is the Digital Video Logger (DVL), which is used to input equipment settings (station interval, stacking, radar velocity, depth of investigation, etc.) and store GPR-RTK/GPS data. The DVL also has a display screen that provides a real-time GPR cross-section view of the subsurface as data is being collected along a measurement transect (
Figure 3a,c). Consequently, the DVL can provide an almost instant indication of a buried drainage pipe. Suspected locations of the buried drainage pipes can then be flagged in the field, with flagged locations that line-up, pointing to the presence and trend of a drain line. Additionally, spiral/serpentine GPR transects or segments of transects can be carried out, on the spot, based on DVL indications of a buried drainage pipe, directly for the purpose of confirming drain line presence and determining its directional trend.
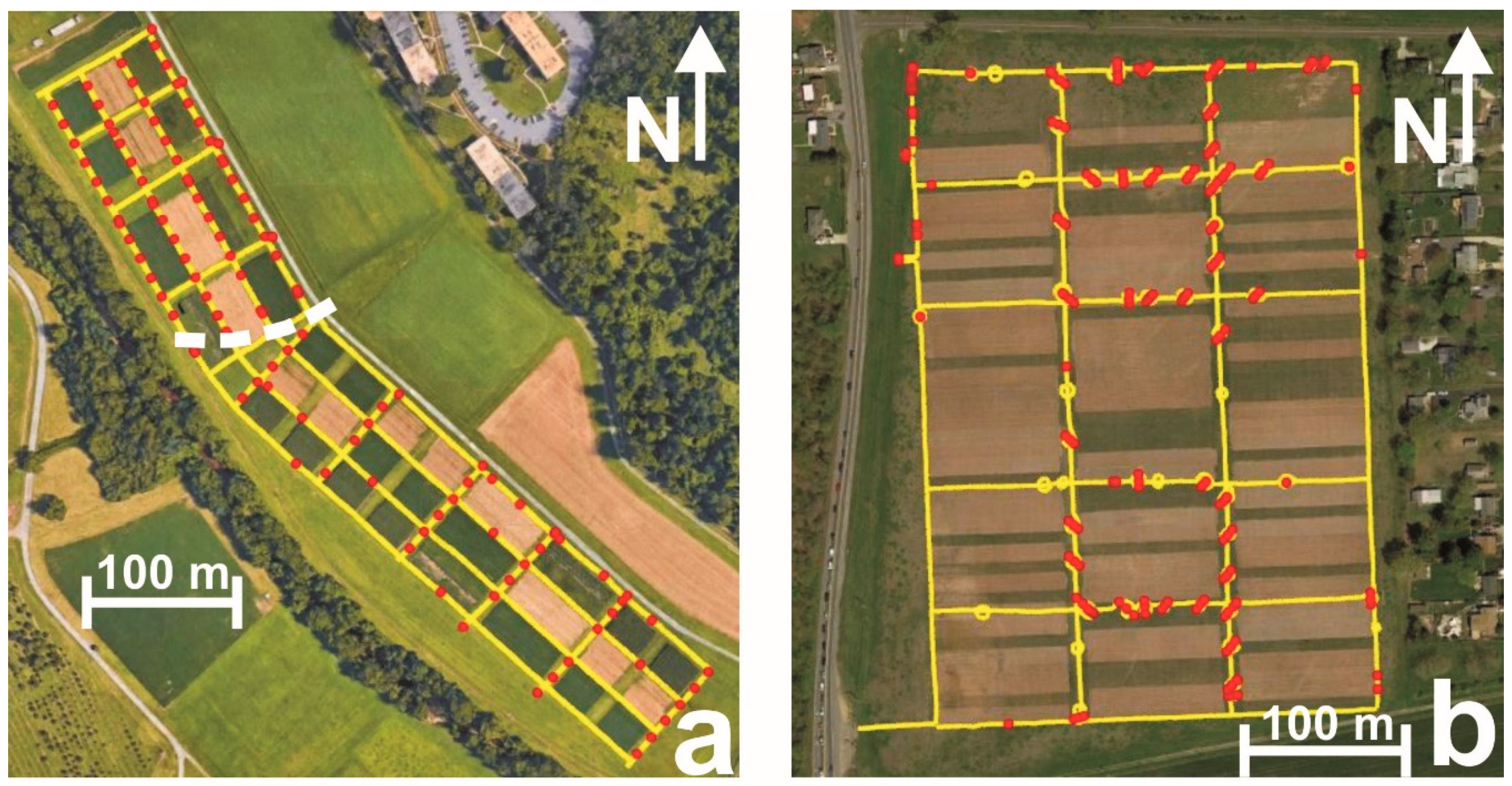
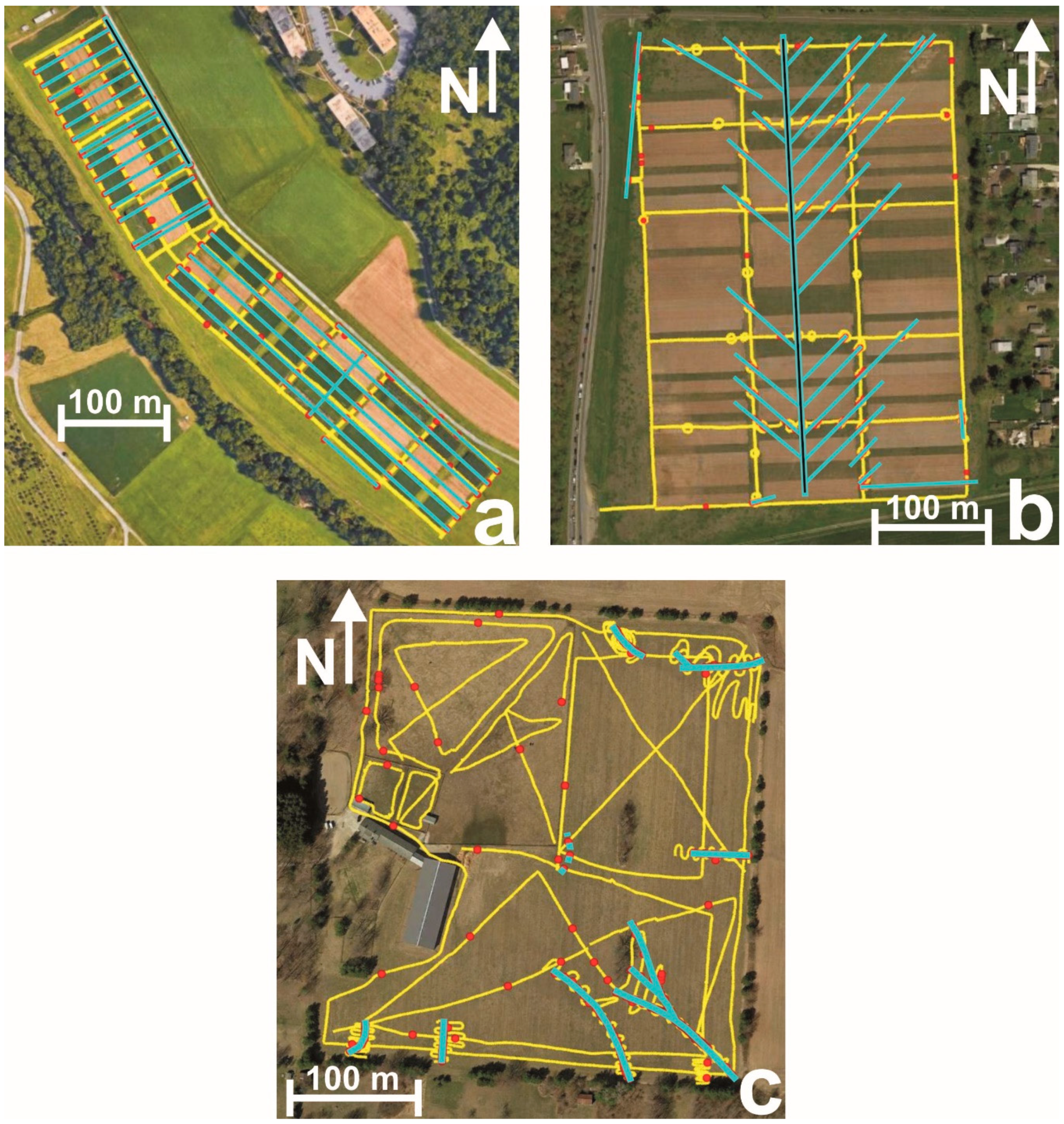
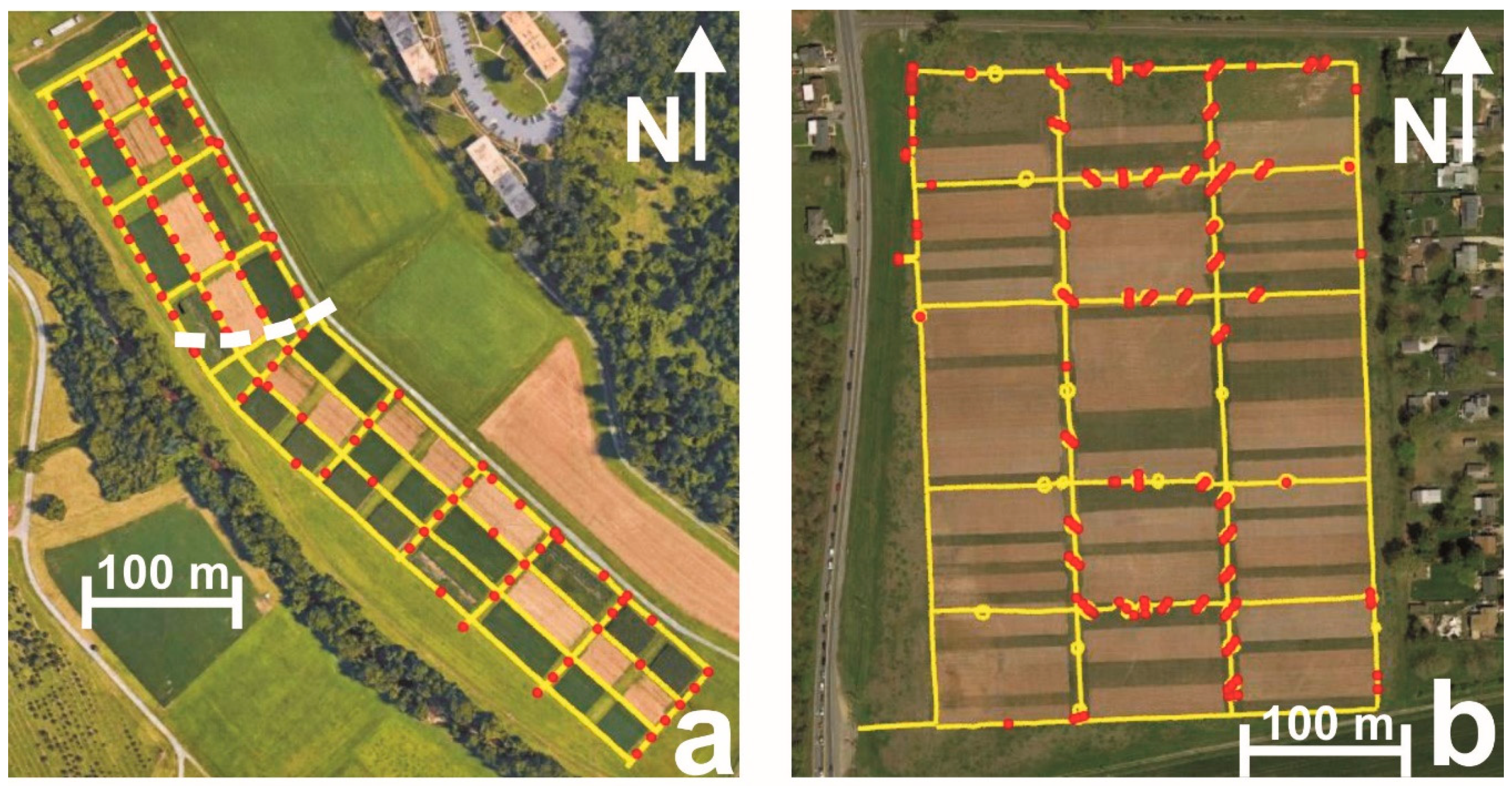
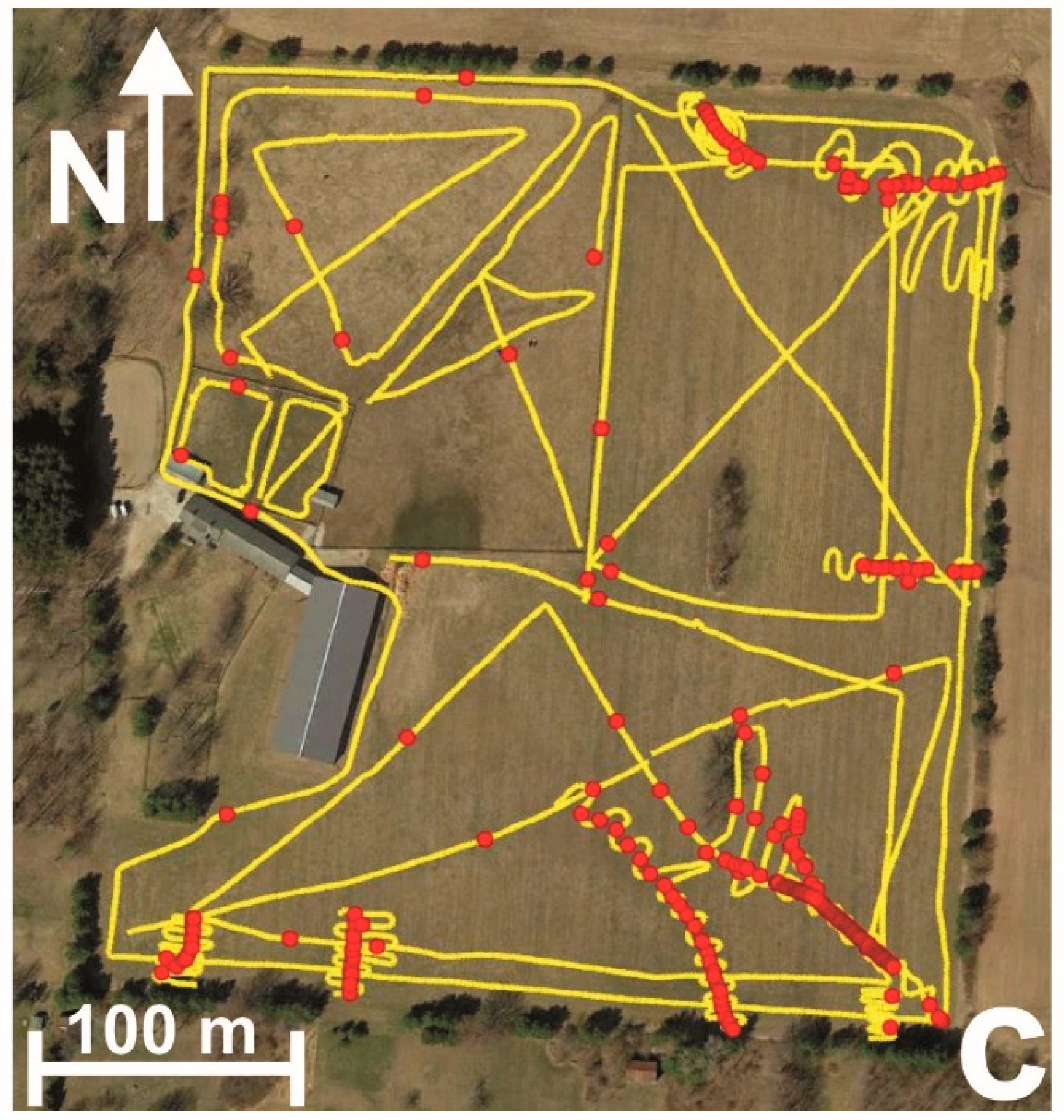
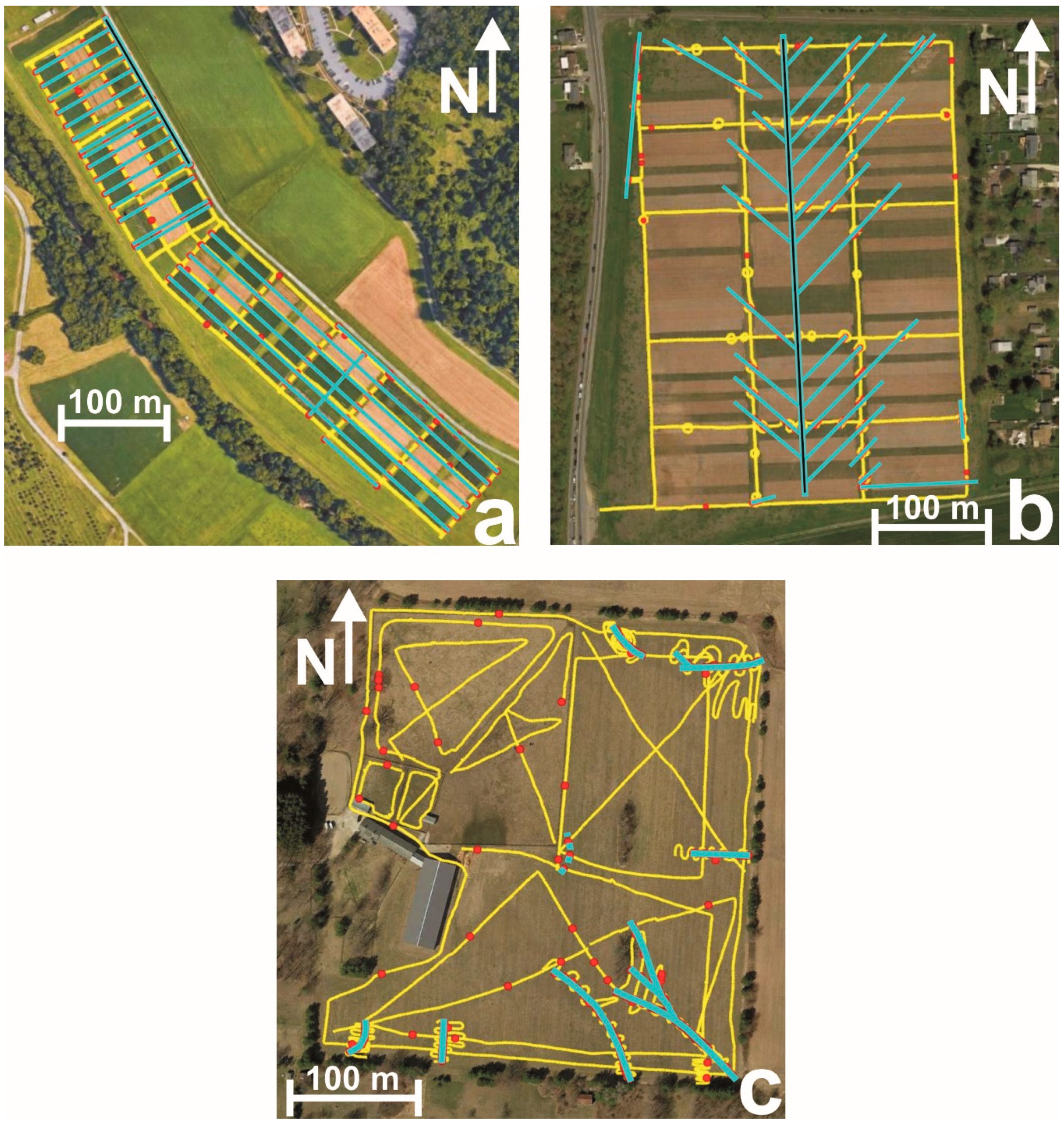
Site maps showing GPR measurement transects (yellow lines—obtained through RTK/GNSS data) are provided in
Figure 4. The physical GNSS base station locations at Sites 1 and 2 are marked with orange square symbols (
Figure 4a,b). (Again, a virtual base station was employed at Site 3, so there is no orange square symbol depicted in
Figure 4c) At Sites 1 and 2, there were essentially two sets of GPR transects, one that coincided or paralleled the longest side boundaries at the sites and then a second set that was oriented perpendicular to the first set. At Site 2, most of the GPR transects contained spiral path segments that provided insight on drain line directional trends (
Figure 4b). At Site 3, linear GPR transects around the perimeter of the property and within the fenced-in grazing/exercise areas or hay field were used for initial indications of where drainage pipes might exist. These linear GPR transects at Site 3 were then followed-up with spiral or serpentine GPR transects that were again used to determine the trend and extent of individual drain lines.
2.4. Data Processing and Interpretation
The principle of GPR operation is conceptually simple and involves directing an electromagnetic radio energy (radar) pulse into the subsurface, followed by measurement of the elapsed time taken by the signal as it is travels downwards from the transmitting antenna, partially reflects off a buried feature, and is eventually returned to the surface, where it is recorded by a receiving antenna. For each point of measurement along a GPR transect, reflections from different depths produce a signal trace, which is a function of the radar wave amplitude (and energy) versus two-way travel time. (
Note: As previously indicated, soil water content measurements can be used to convert two-way travel times to depth values.) Antenna frequency, soil moisture conditions, clay content, salinity, and the amount of iron oxide present all have a substantial influence on the distance beneath the surface to which the radar signal penetrates. Differences in the dielectric constant across a buried feature discontinuity govern the amount of radar energy that reflects off the buried feature and then returns to surface to be recorded by the receiving antenna. Previous research [
5] shows that the GPR drainage pipe response (i.e., amount of radar energy reflected from a buried pipe) does not depend on the type of pipe (clay tile or CPT) but rather the difference between the dielectric constant of the soil surrounding the pipe versus the dielectric constant of the air and/or water inside the pipe.
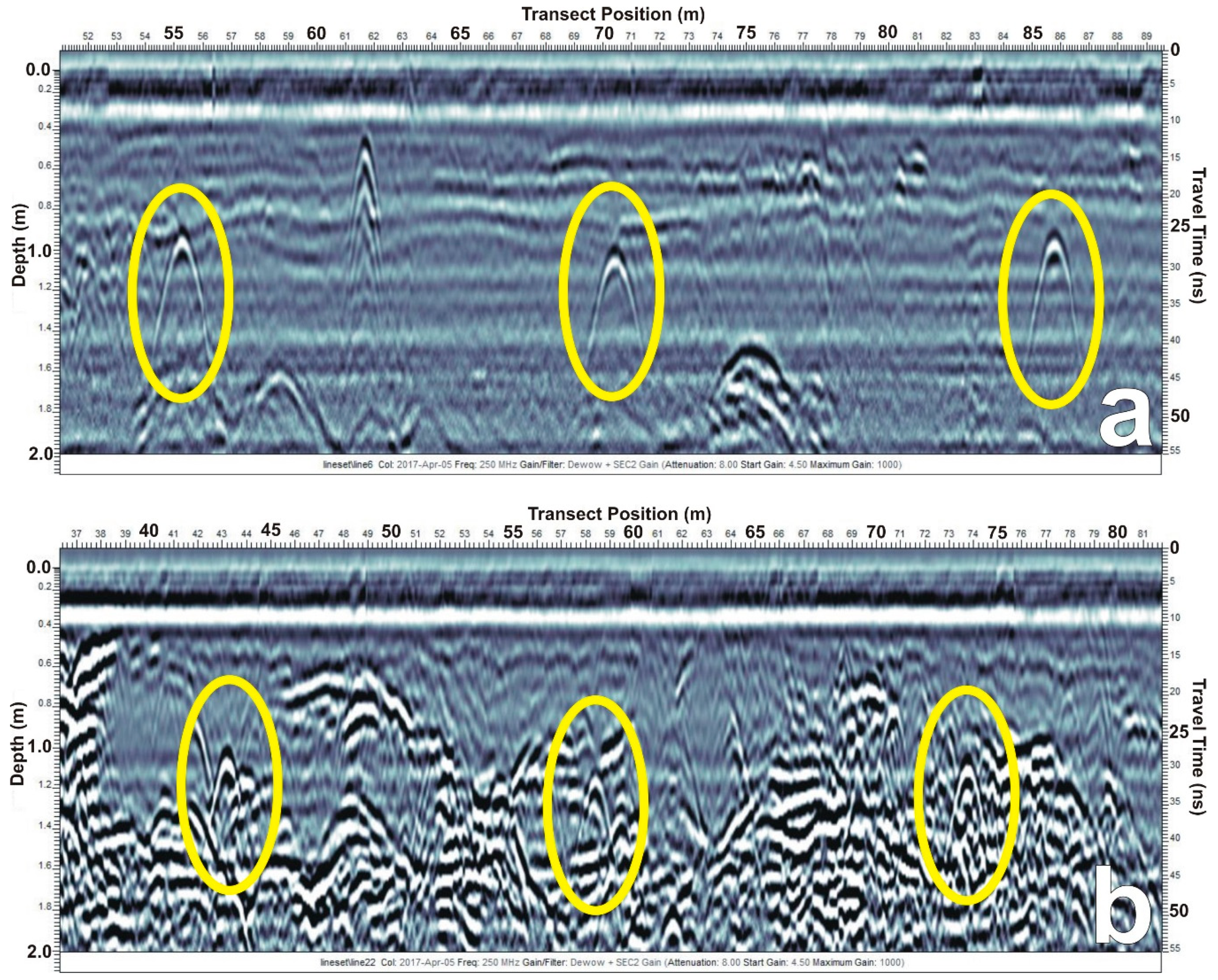
A GPR profile (i.e., cross-section) of the subsurface beneath a GPR transect is generated by sequentially combining, side-by-side, one after another, the signal traces obtained at each measurement point along the transect. The horizontal axis on a GPR profile represents distance along the transect (in meters), while the vertical axis represents two-way radar signal travel time (in nanoseconds) and/or depth (in meters). With depths of investigation of 1.5 or 2.0 m, the GPR profiles generated for this study essentially depict GPR responses only within the soil profile.
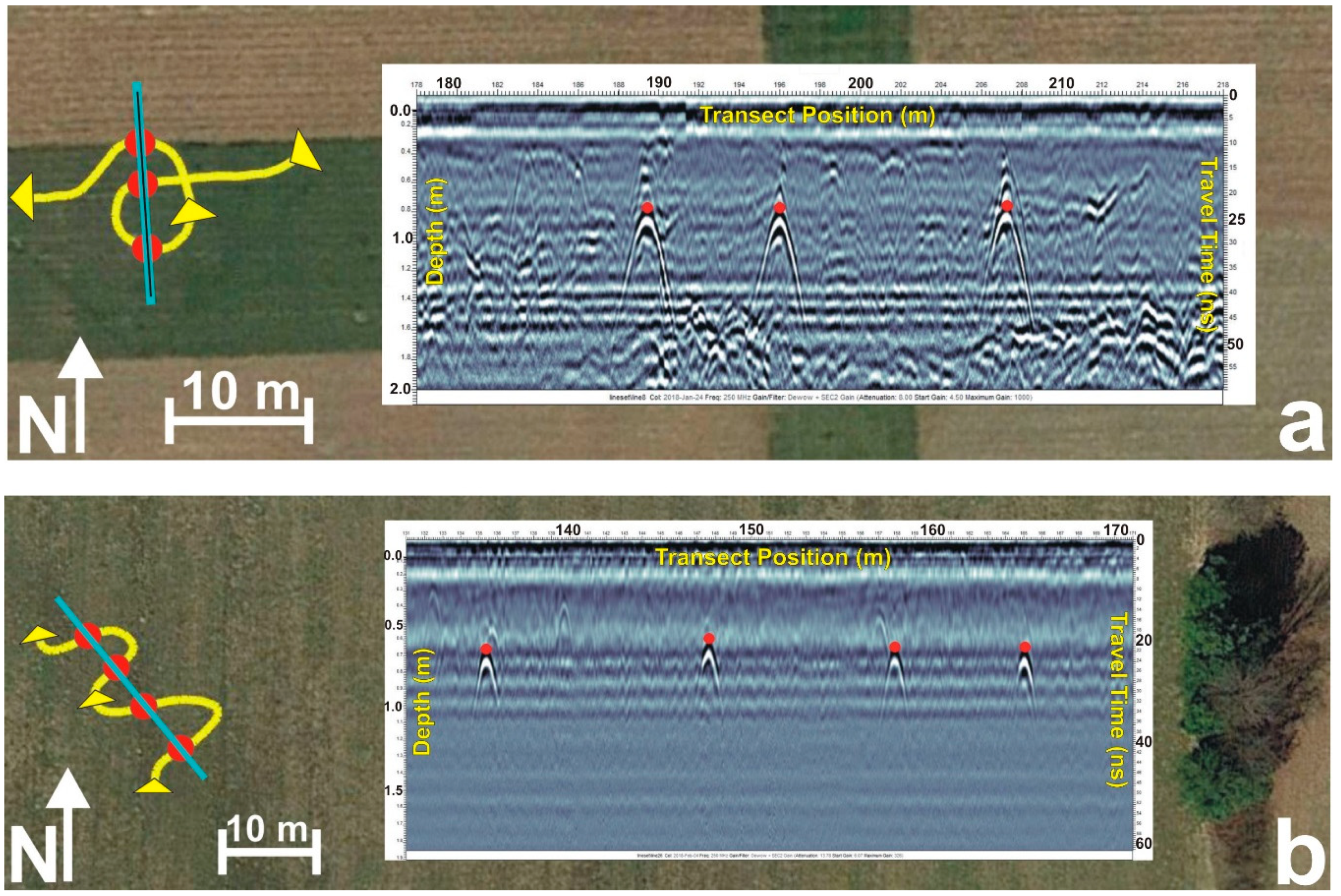
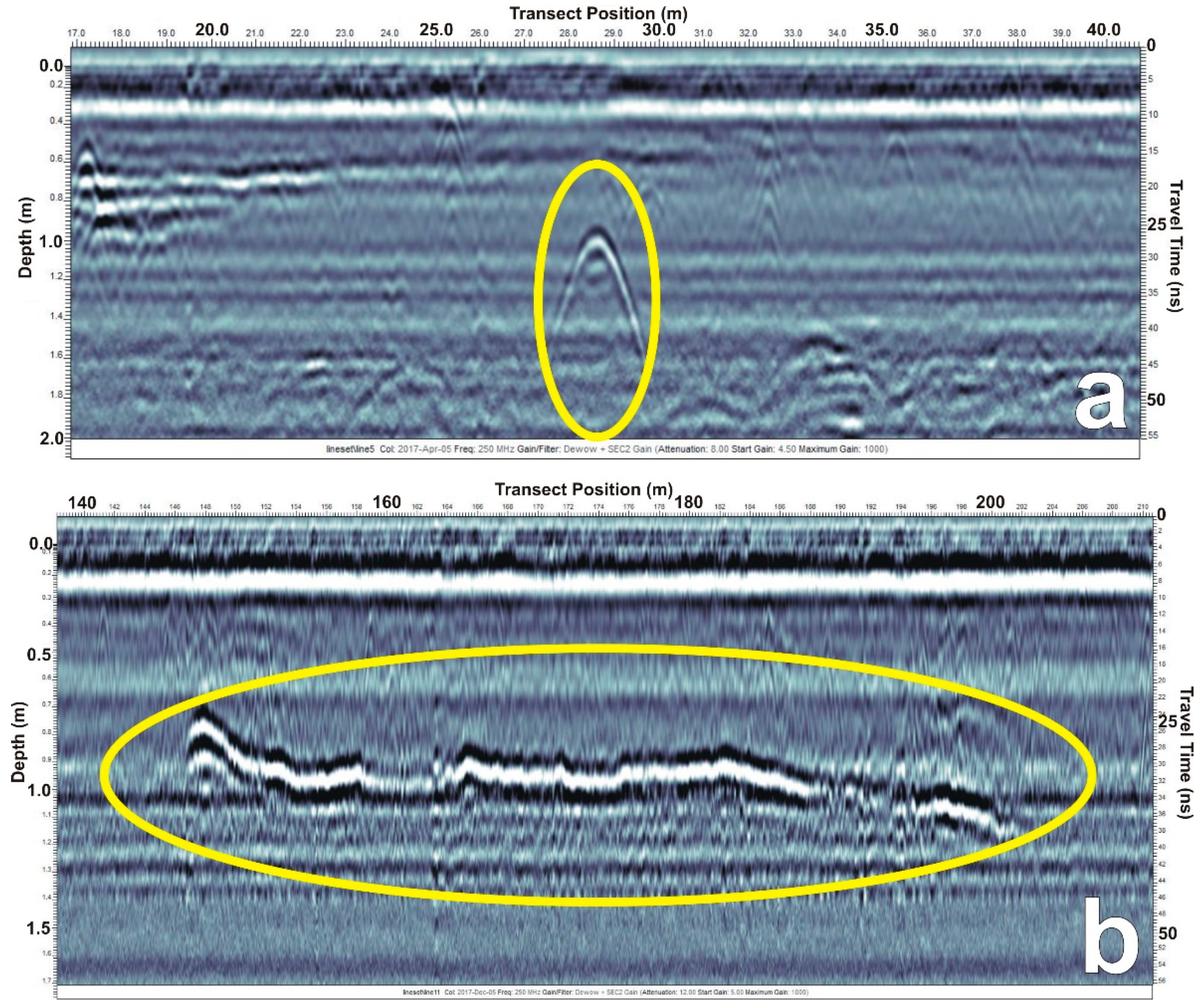
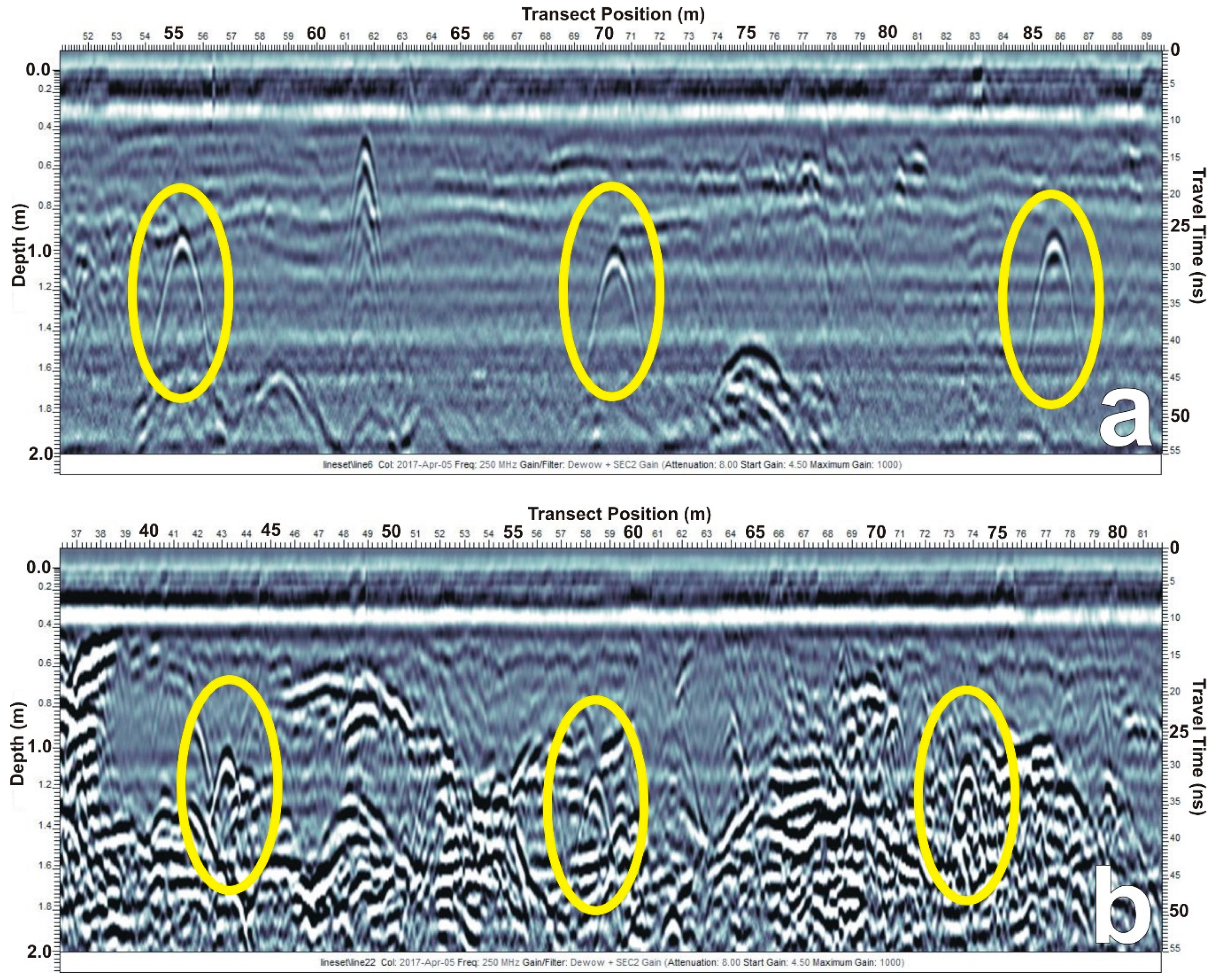
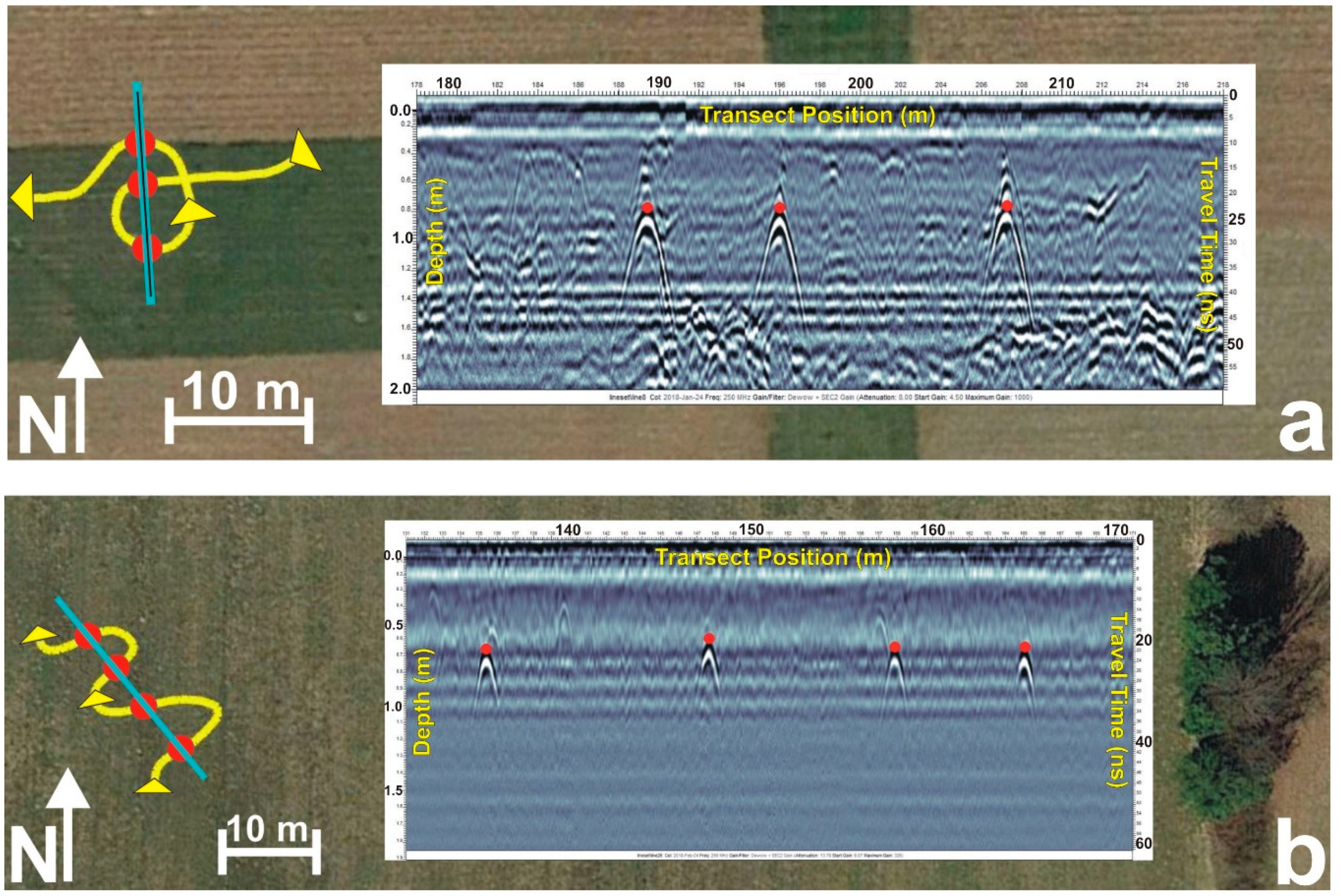
Figure 5 depicts the two types of GPR profile drainage pipe responses. Where there is a somewhat modest to large angle (i.e., 15° < x° < 90°) between the GPR transect orientation and drain line directional trend, the GPR response is that of an upside-down U-shaped feature (i.e., reflection hyperbola), and the position for the top of the drainage pipe corresponds with the apex of the reflection hyperbola (
Figure 5a). The drainage pipe reflection hyperbola is horizontally compressed if the angle is closer to 90°, while alternatively, if the angle is closer to 15°, then the reflection hyperbola becomes spread out horizontally.
It is important to note other buried features, such as large stones can produce a reflection hyperbola, but in map view, the location of these features are isolated, while mapped locations of actual drainage pipe reflection hyperbolas form a line. Where the GPR transect is essentially over top and along trend (x° < 15°) of a drain line, the GPR response formed is that a banded linear feature, with the position for the top of the drainage pipe corresponding to the top of the banded linear feature (
Figure 5b). Obtaining the banded linear GPR drainage pipe response is fairly uncommon because this response requires, without any prior knowledge of drain line locations and directional trends, that a GPR transect just happens to be oriented over the top and along the trend of a drain line.
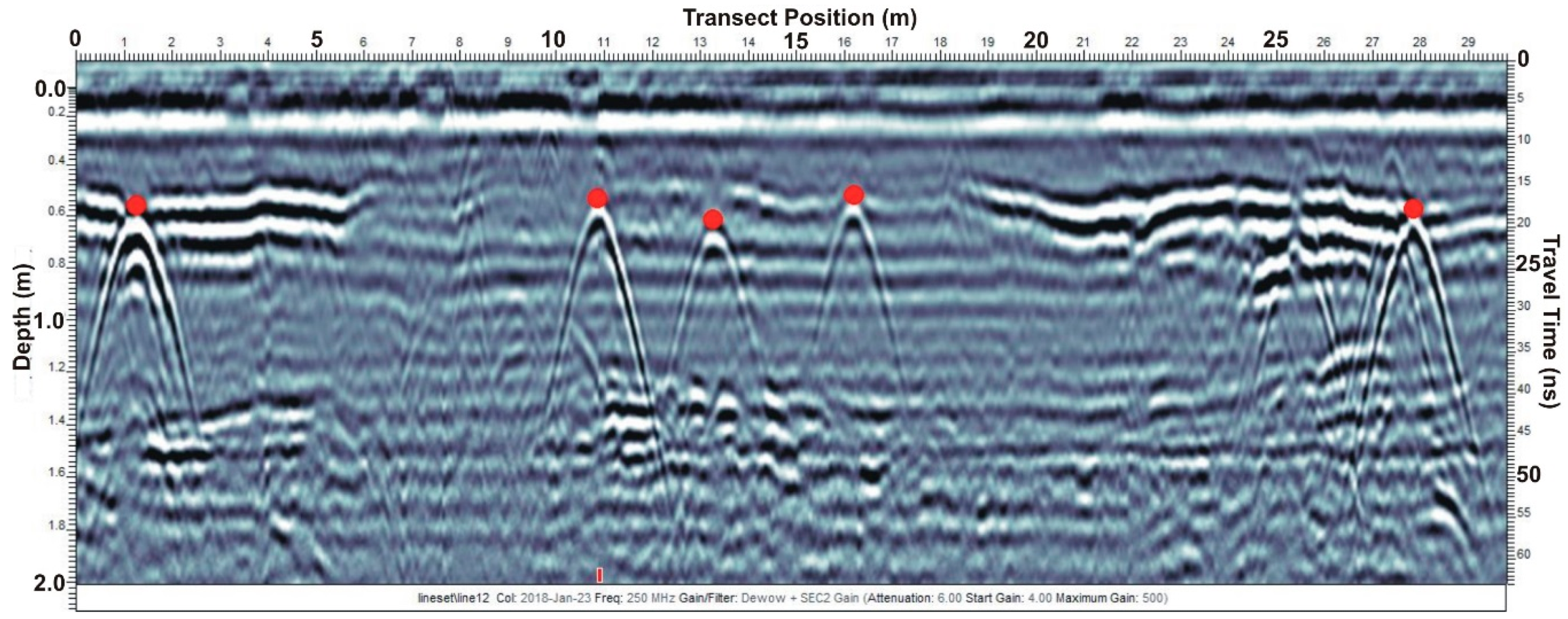
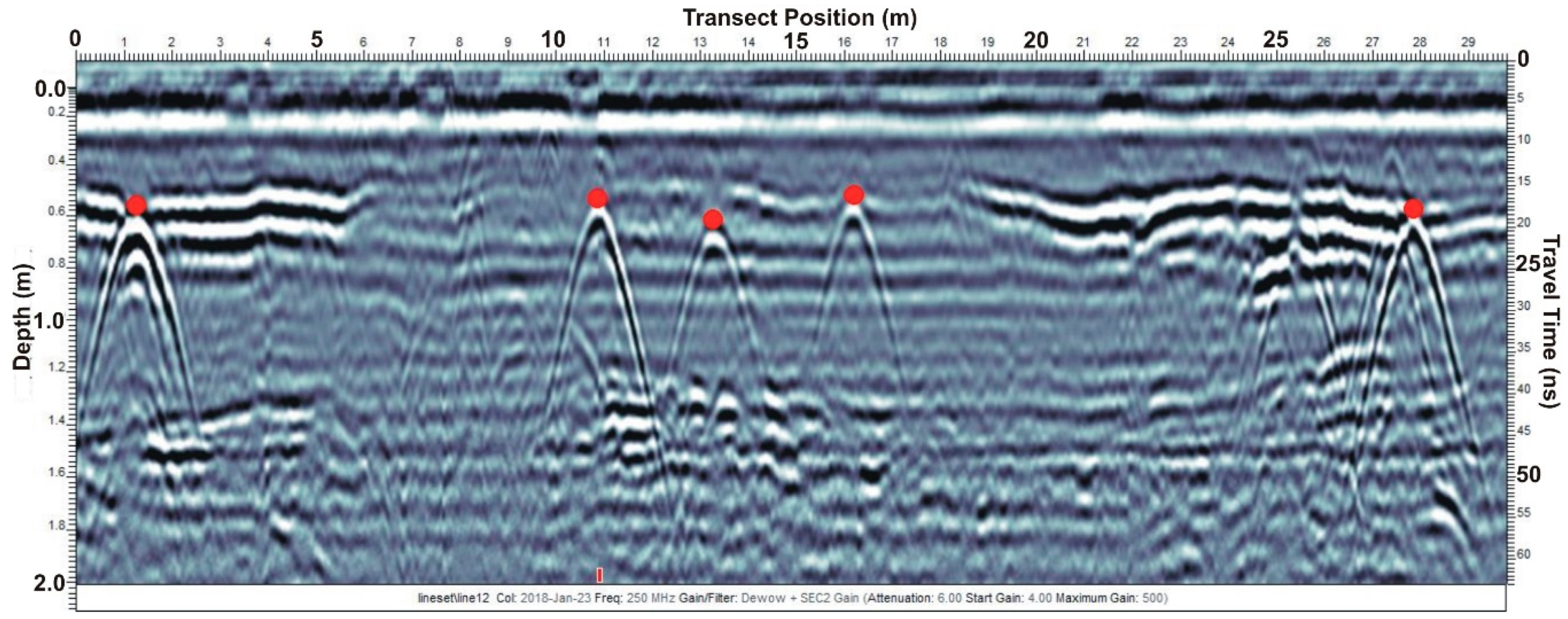
EKKO Project 5 software (Sensors & Software Inc., Mississagua, ON, Canada) was used to process and interpret the GPR-RTK/GNSS data acquired at Sites 1, 2, and 3, starting with the generation of GPR profiles from the GPR measurement transects. EKKO Project 5 reflection hyperbola curve fitting procedures, employed only in cases where the GPR transect was perpendicular to the drain line directional trend, allowed soil radar velocities to be refined at each site (from the original TDR measurements), and in turn, improve the accuracy of GPR profile depth scales. Soil radar velocities, refined via EKKO Project 5, were 0.072 m/ns on 5 April 2017 and 0.063 m/ns on 24 January 2018 at Site 1, 0.067 m/ns on 25 January 2018 at Site 2, and 0.060 m/ns on both 6 November 2017 and 5 February 2018 at Site 3. The only processing steps used to produce GPR profiles via EKKO Project 5 were (1) application of a signal saturation correction filter (i.e., Dewow) to remove slowly decaying low frequency noise and (2) utilization of a spreading and exponential calibrated compensation gain function to amplify potential GPR drainage pipe responses. An interpretation module in EKKO Project 5 allowed potential drainage pipe responses in a GPR profile to be marked (
Figure 6). With GPR and RTK/GNSS data collected together, EKKO Project 5 was then employed to save a spreadsheet file of the latitudes, longitudes, and depths corresponding to the marked potential drainage pipe responses. Furthermore, because GPR and RTK/GNSS data were collected concurrently, EKKO Project 5 was then able to generate a KMZ file that stored a site map of the GPR transects along with the marked potential drainage pipe locations. Opening this KMZ file in Google Earth allowed GPR measurement transects and the possible pipe locations to be overlaid on an aerial image.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}