Author Contributions
Conceptualization, J.L. and Z.Z.; methodology, J.L.; software, T.L. and S.Z.; validation, J.L. and Z.Z.; formal analysis, J.L.; investigation, J.L., M.H. and M.T.; resources, Z.Z.; data curation, Z.Z. and J.L.; writing—original draft preparation, J.L.; writing—review and editing, D.W. and Z.Z.; visualization, J.L.; supervision, Z.Z. and H.L.; project administration, Z.Z., X.H. and Y.T.; funding acquisition, Z.Z. and D.W. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Soil moisture content and particle size distribution test. (a) Soil moisture determination; (b) soil screening test.
Figure 1.
Soil moisture content and particle size distribution test. (a) Soil moisture determination; (b) soil screening test.
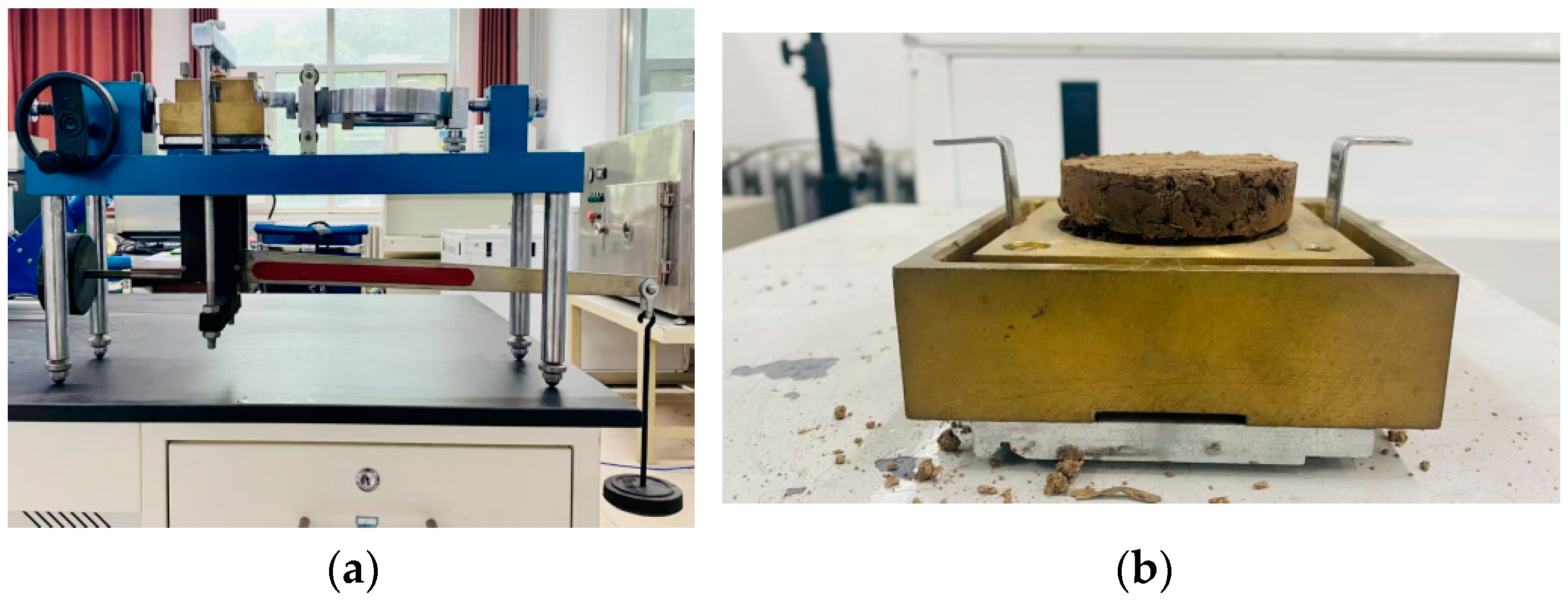
Figure 2.
Direct shear test on soil. (a) ZJ-1B strain-controlled direct shear instrument; (b) test soil sample.
Figure 2.
Direct shear test on soil. (a) ZJ-1B strain-controlled direct shear instrument; (b) test soil sample.
Figure 3.
Curves of soil shear stress and shear displacement.
Figure 3.
Curves of soil shear stress and shear displacement.
Figure 4.
Mohr–Coulomb strength envelope diagram.
Figure 4.
Mohr–Coulomb strength envelope diagram.
Figure 5.
Test of wheat crop residue density.
Figure 5.
Test of wheat crop residue density.
Figure 6.
Test for determining the soil static friction coefficient. (a) Test bench for the determination of the static friction factor; (b) Schematic diagram of static friction factor measurement test. 1. High-precision universal level; 2. test sample; 3. test sample container; 4. substrate; 5. handle adjustment.
Figure 6.
Test for determining the soil static friction coefficient. (a) Test bench for the determination of the static friction factor; (b) Schematic diagram of static friction factor measurement test. 1. High-precision universal level; 2. test sample; 3. test sample container; 4. substrate; 5. handle adjustment.
Figure 7.
Schematic diagram of rolling friction factor measurement test.
Figure 7.
Schematic diagram of rolling friction factor measurement test.
Figure 8.
Collision recovery coefficient measurement test. (a) Test bench for determination of collision recovery coefficient; (b) Schematic diagram of collision recovery coefficient measurement.
Figure 8.
Collision recovery coefficient measurement test. (a) Test bench for determination of collision recovery coefficient; (b) Schematic diagram of collision recovery coefficient measurement.
Figure 9.
Measurement principle of angle of repose.
Figure 9.
Measurement principle of angle of repose.
Figure 10.
Response surface diagram of the interaction between parameters that affect the angle of repose. (a) Response surface diagram of the interaction of X1 and X4 factors on the angle of repose. (b) Response surface diagram of the interaction of X1 and X7 factors on the angle of repose. (c) Response surface diagram of interaction between X1 and X10 factors on angle of repose. (d) Response surface diagram of the interaction of X4 and X7 factors on the angle of repose. (e) Response surface diagram of the interaction of X4 and X10 factors with respect to the angle of repose. (f) Response surface diagram of X7 and X10 factors interacting with the angle of repose.
Figure 10.
Response surface diagram of the interaction between parameters that affect the angle of repose. (a) Response surface diagram of the interaction of X1 and X4 factors on the angle of repose. (b) Response surface diagram of the interaction of X1 and X7 factors on the angle of repose. (c) Response surface diagram of interaction between X1 and X10 factors on angle of repose. (d) Response surface diagram of the interaction of X4 and X7 factors on the angle of repose. (e) Response surface diagram of the interaction of X4 and X10 factors with respect to the angle of repose. (f) Response surface diagram of X7 and X10 factors interacting with the angle of repose.
Figure 11.
Soil angle of repose test. (a) Field test; (b) simulation test.
Figure 11.
Soil angle of repose test. (a) Field test; (b) simulation test.
Figure 12.
Particle bed for simulation test.
Figure 12.
Particle bed for simulation test.
Figure 13.
Surface roughness simulation cross-section.
Figure 13.
Surface roughness simulation cross-section.
Figure 14.
Simulation cross-section of wheat crop residue coverage. (a) Particle bed surface after simulation; (b) grain distribution of wheat crop residues after soil particles were hidden.
Figure 14.
Simulation cross-section of wheat crop residue coverage. (a) Particle bed surface after simulation; (b) grain distribution of wheat crop residues after soil particles were hidden.
Table 1.
Measurement results of soil density and moisture content.
Table 1.
Measurement results of soil density and moisture content.
| Test Number | Soil Density (kg/m3) | Soil Moisture Content/% |
|---|
| 1 | 2.23 × 103 | 25.31 |
| 2 | 2.19 × 103 | 21.85 |
| 3 | 2.13 × 103 | 19.78 |
| 4 | 2.17 × 103 | 21.47 |
| 5 | 2.20 × 103 | 20.56 |
| Mean value | 2.18 × 103 | 21.79 |
Table 2.
Soil particle size distribution.
Table 2.
Soil particle size distribution.
| Particle Size/mm | Average Mass/g | Percentage/% |
|---|
| 0~0.25 | 58.40 | 11.68 |
| 0.25~0.5 | 9.10 | 1.82 |
| 0.5~1 | 82.25 | 16.45 |
| 1~2 | 25.20 | 5.04 |
| 2~3 | 115.30 | 23.06 |
| >3 | 209.75 | 41.95 |
Table 3.
Measurement results of wheat crop residue density.
Table 3.
Measurement results of wheat crop residue density.
| Test Number | Wheat Crop Residue Density (kg/m3) |
|---|
| 1 | 239 |
| 2 | 243 |
| 3 | 245 |
| 4 | 236 |
| 5 | 242 |
| Mean value | 241 |
Table 4.
Results of static friction factor measurement.
Table 4.
Results of static friction factor measurement.
| Contact | Static Friction Factor |
|---|
| Soil–65Mn steel | 0.57–0.91 |
| Soil–soil | 0.25–0.85 |
| Wheat crop residues–65Mn steel | 0.62–0.85 |
| Soil–wheat crop residues | 0.60–0.80 |
| Wheat crop residues–wheat crop residues | 0.20–1.16 |
Table 5.
Test results of rolling friction factor.
Table 5.
Test results of rolling friction factor.
| Contact | Rolling Friction Factor |
|---|
| Soil–65Mn steel | 0.19–0.57 |
| Soil–soil | 0.05–0.25 |
| Wheat crop residues–65Mn steel | 0.30–0.62 |
| Soil–wheat crop residues | 0.05–0.10 |
| Wheat crop residues–wheat crop residues | 0.05–0.15 |
Table 6.
Results of collision recovery coefficient measurement.
Table 6.
Results of collision recovery coefficient measurement.
| Contact | Collision Recovery Coefficient |
|---|
| Soil–65Mn steel | 0.16–0.41 |
| Soil–soil | 0.15–0.65 |
| Wheat crop residues–65Mn steel | 0.21–0.35 |
| Soil–wheat crop residues | 0.15–0.75 |
| Wheat crop residues–wheat crop residues | 0.20–0.70 |
Table 7.
Experimental results of the angle of repose for soil–wheat crop residues.
Table 7.
Experimental results of the angle of repose for soil–wheat crop residues.
| Test Number | Angle of Repose β/(°) |
|---|
| 1 | 36.80 |
| 2 | 34.22 |
| 3 | 35.35 |
| 4 | 34.91 |
| 5 | 34.32 |
| Mean value | 35.12 |
Table 8.
Plackett–Burman test parameters of soil–wheat crop residue mix.
Table 8.
Plackett–Burman test parameters of soil–wheat crop residue mix.
| Argument | Parameter Name | Level |
|---|
| −1 | +1 |
|---|
| X1 | Soil–soil collision recovery coefficient | 0.15 | 0.65 |
| X2 | Soil–static friction factor of soil | 0.25 | 0.85 |
| X3 | Soil–soil rolling friction factor | 0.05 | 0.25 |
| X4 | Soil–wheat crop residue collision recovery coefficient | 0.15 | 0.75 |
| X5 | Soil–wheat static friction factor of previous crop | 0.60 | 0.80 |
| X6 | Soil–wheat crop residue rolling friction factor | 0.05 | 0.10 |
| X7 | Coefficient of restitution for wheat stubble–wheat stubble collision | 0.20 | 0.70 |
| X8 | Wheat crop residue–static friction factor of wheat crop residues | 0.20 | 1.16 |
| X9 | Wheat crop residue–wheat crop residue rolling friction factor | 0.05 | 0.15 |
| X10 | Soil surface energy (J·m−2) | 2 | 8 |
| X11 | Virtual parameter | - | - |
Table 9.
Plackett–Burman test scheme and results of soil–wheat crop residue mix.
Table 9.
Plackett–Burman test scheme and results of soil–wheat crop residue mix.
| ID | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | Angle of Repose/(°) |
|---|
| 1 | 0.15 | 0.85 | 0.25 | 0.15 | 0.8 | 0.1 | 0.7 | 0.2 | 0.05 | 2 | 36.2 |
| 2 | 0.65 | 0.25 | 0.25 | 0.75 | 0.6 | 0.1 | 0.7 | 1.16 | 0.05 | 2 | 39.6 |
| 3 | 0.15 | 0.25 | 0.05 | 0.15 | 0.6 | 0.05 | 0.2 | 0.2 | 0.05 | 2 | 30.5 |
| 4 | 0.15 | 0.25 | 0.05 | 0.75 | 0.6 | 0.1 | 0.7 | 0.2 | 0.15 | 8 | 32.2 |
| 5 | 0.65 | 0.25 | 0.25 | 0.75 | 0.8 | 0.05 | 0.2 | 0.2 | 0.15 | 2 | 34.5 |
| 6 | 0.15 | 0.85 | 0.25 | 0.75 | 0.6 | 0.05 | 0.2 | 1.16 | 0.05 | 8 | 36.4 |
| 7 | 0.65 | 0.85 | 0.05 | 0.75 | 0.8 | 0.1 | 0.2 | 0.2 | 0.05 | 8 | 36.2 |
| 8 | 0.65 | 0.85 | 0.25 | 0.15 | 0.6 | 0.05 | 0.7 | 0.2 | 0.15 | 8 | 47.7 |
| 9 | 0.65 | 0.85 | 0.05 | 0.15 | 0.6 | 0.1 | 0.2 | 1.16 | 0.15 | 2 | 38.8 |
| 10 | 0.15 | 0.85 | 0.05 | 0.75 | 0.8 | 0.05 | 0.7 | 1.16 | 0.15 | 2 | 35.1 |
| 11 | 0.15 | 0.25 | 0.25 | 0.15 | 0.8 | 0.1 | 0.2 | 1.16 | 0.15 | 8 | 37.5 |
| 12 | 0.4 | 0.55 | 0.15 | 0.45 | 0.7 | 0.075 | 0.45 | 0.68 | 0.1 | 5 | 27.5 |
| 13 | 0.65 | 0.25 | 0.05 | 0.15 | 0.8 | 0.05 | 0.7 | 1.16 | 0.05 | 8 | 47.3 |
Table 10.
Significance analysis of Plackett–Burman feature parameters.
Table 10.
Significance analysis of Plackett–Burman feature parameters.
| Source of Variance | Sum of Squares | Degrees of Freedom | Mean Square Value | F | p |
|---|
| model | 302.17 | 10 | 30.22 | 251.81 | 0.0490 |
| X1 | 109.20 | 1 | 109.20 | 910.03 | 0.0211 |
| X2 | 6.45 | 1 | 6.45 | 53.78 | 0.0863 |
| X3 | 11.60 | 1 | 11.60 | 96.69 | 0.0645 |
| X4 | 48.00 | 1 | 48.00 | 400.00 | 0.0318 |
| X5 | 0.2133 | 1 | 0.2133 | 1.78 | 0.4097 |
| X6 | 10.08 | 1 | 10.08 | 84.03 | 0.0692 |
| X7 | 48.80 | 1 | 48.80 | 406.69 | 0.0315 |
| X8 | 25.23 | 1 | 25.23 | 210.25 | 0.0438 |
| X9 | 0.0133 | 1 | 0.0133 | 0.1111 | 0.7952 |
| X10 | 42.56 | 1 | 42.56 | 354.69 | 0.0338 |
Table 11.
Test design and results of steepest climb.
Table 11.
Test design and results of steepest climb.
| Serial Number | X1 | X4 | X7 | X10 | Angle of Repose/(°) | Relative Error/% |
|---|
| 1 | 0.150 | 0.75 | 0.200 | 2.0 | 32.57 | 7.26 |
| 2 | 0.275 | 0.60 | 0.325 | 3.5 | 36.58 | 4.16 |
| 3 | 0.400 | 0.45 | 0.450 | 5.0 | 38.16 | 8.66 |
| 4 | 0.525 | 0.30 | 0.575 | 6.5 | 39.05 | 11.19 |
| 5 | 0.650 | 0.15 | 0.700 | 8.0 | 39.71 | 13.07 |
Table 12.
Box–Behnken test parameters of soil–wheat crop residue mix.
Table 12.
Box–Behnken test parameters of soil–wheat crop residue mix.
| Level | Experimental Factor |
|---|
| X1 | X4 | X7 | X10 |
|---|
| −1 | 0.212 | 0.525 | 0.300 | 3.00 |
| 0 | 0.275 | 0.600 | 0.325 | 3.50 |
| 1 | 0.338 | 0.675 | 0.350 | 4.00 |
Table 13.
Box–Behnken scheme and results.
Table 13.
Box–Behnken scheme and results.
| Serial Number | X1 | X4 | X7 | X10 | Angle of Repose/(°) |
|---|
| 1 | −1 | 1 | 0 | 0 | 36.11 |
| 2 | 0 | 1 | 1 | 0 | 35.46 |
| 3 | 0 | 0 | 0 | 0 | 35.01 |
| 4 | 0 | −1 | 0 | −1 | 35.52 |
| 5 | 1 | 1 | 0 | 0 | 36.45 |
| 6 | −1 | 0 | 0 | −1 | 35.76 |
| 7 | 0 | 1 | −1 | 1 | 35.81 |
| 8 | 0 | −1 | 1 | 0 | 34.89 |
| 9 | −1 | 0 | 1 | 0 | 35.73 |
| 10 | 0 | 0 | 0 | 0 | 35.05 |
| 11 | 0 | 1 | 1 | −1 | 35.46 |
| 12 | 0 | 0 | 0 | 1 | 35.06 |
| 13 | −1 | −1 | 0 | 0 | 36.97 |
| 14 | 0 | 0 | 0 | 0 | 35.01 |
| 15 | 0 | 1 | 0 | 1 | 35.81 |
| 16 | 0 | 1 | −1 | 0 | 35.75 |
| 17 | −1 | 0 | −1 | 0 | 36.01 |
| 18 | 0 | 0 | −1 | −1 | 34.6 |
| 19 | 1 | 0 | 0 | −1 | 35.79 |
| 20 | 0 | 0 | 0 | 0 | 35.33 |
| 21 | 0 | 0 | 1 | −1 | 34.98 |
| 22 | −1 | 0 | 0 | 1 | 36.18 |
| 23 | 0 | −1 | 0 | 1 | 35.55 |
| 24 | 0 | −1 | −1 | 0 | 35.82 |
| 25 | 0 | 0 | 0 | 1 | 33.76 |
| 26 | 1 | 0 | −1 | 0 | 35.67 |
| 27 | 1 | −1 | 0 | 0 | 35.78 |
| 28 | 1 | 0 | 1 | 0 | 35.09 |
| 29 | 0 | 0 | 0 | 0 | 35.19 |
Table 14.
Analysis of variance of Box–Behnken regression model.
Table 14.
Analysis of variance of Box–Behnken regression model.
| Source of Variance | Sum of Squares | Degree of Freedom | Mean Square | F-Number | P-Number |
|---|
| model | 10.17 | 14 | 0.7261 | 34.06 | <0.0001 |
| X1 | 0.7105 | 1 | 0.7105 | 33.33 | <0.0001 |
| X4 | 0.0217 | 1 | 0.0217 | 1.02 | 0.3304 |
| X7 | 1.18 | 1 | 1.18 | 55.27 | <0.0001 |
| X10 | 0.0002 | 1 | 0.0002 | 0.0098 | 0.9227 |
| X1X4 | 0.5852 | 1 | 0.5852 | 27.45 | 0.0001 |
| X1X7 | 0.0225 | 1 | 0.0225 | 1.06 | 0.3217 |
| X1X10 | 0.3306 | 1 | 0.3306 | 15.51 | 0.0015 |
| X4X7 | 0.1024 | 1 | 0.1024 | 4.80 | 0.0458 |
| X4X10 | 0.0256 | 1 | 0.0256 | 1.20 | 0.2916 |
| X7X10 | 1.46 | 1 | 1.46 | 68.68 | <0.0001 |
| X12 | 3.02 | 1 | 3.02 | 141.46 | <0.0001 |
| X42 | 1.98 | 1 | 1.98 | 93.08 | <0.0001 |
| X72 | 0.2483 | 1 | 0.2483 | 11.65 | 0.0042 |
| X102 | 0.0741 | 1 | 0.0741 | 3.48 | 0.0833 |
| Residual error | 0.2984 | 14 | 0.0213 | | |
| Missing fit | 0.2204 | 10 | 0.0220 | 1.13 | 0.4934 |
| Pure error | 0.0781 | 4 | 0.0195 | | |
| total | 10.46 | 28 | | | |
Table 15.
Physical parameters of soil–wheat crop residue mixture simulation.
Table 15.
Physical parameters of soil–wheat crop residue mixture simulation.
| Argument | Soil | Wheat Crop Residues |
|---|
| Poisson’s ratio | 0.32 | 0.39 |
| Density (kg/m3) | 2.18 × 103 | 241 |
| Shear modulus (kPa) | 1.2 × 106 | 5.52 × 106 |
| Surface energy (J·m−2) | 3.94 | - |
Table 16.
Simulation test contact parameters of soil–wheat crop residue mixture.
Table 16.
Simulation test contact parameters of soil–wheat crop residue mixture.
| Contact | Static Friction Factor | Rolling Friction Factor | Collision Recovery Coefficient |
|---|
| Soil–65Mn steel | 0.74 | 0.38 | 0.285 |
| Soil–soil | 0.55 | 0.15 | 0.237 |
| Wheat crop residues–65Mn steel | 0.74 | 0.46 | 0.280 |
| Soil–wheat crop residues | 0.7 | 0.08 | 0.311 |
| Wheat crop residues–wheat crop residues | 0.68 | 0.10 | 0.575 |
Table 17.
The statistical results of the simulation experiment on the straw mulching rate.
Table 17.
The statistical results of the simulation experiment on the straw mulching rate.
| Test Number | Cover Rate of Wheat Crop Residues/% |
|---|
| 1 | 89.1 |
| 2 | 82.5 |
| 3 | 83.7 |
| 4 | 81.6 |
| 5 | 84.4 |
| Mean value | 84.26 |
Table 18.
Results of surface roughness test.
Table 18.
Results of surface roughness test.
| Test Number | Standard Deviation of Surface Roughness/cm |
|---|
| 1 | 2.59 |
| 2 | 1.82 |
| 3 | 2.11 |
| 4 | 1.96 |
| 5 | 2.30 |
| Mean value | 2.16 |
Table 19.
Results of straw burying rate in field trials.
Table 19.
Results of straw burying rate in field trials.
| Test Number | Coverage Rate of Wheat Crop Residues/% |
|---|
| 1 | 82.3 |
| 2 | 75.1 |
| 3 | 86.5 |
| 4 | 83.1 |
| 5 | 87.6 |
| Mean value | 82.92 |


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}