1. Introduction
As one of the global top ten pineapple producers, China boasts over 400 years of cultivation history, currently accounting for 7% of worldwide pineapple cultivation area and annual production [
1]. The pineapple industry plays a pivotal role in tropical agricultural economies, with distinct regional characteristics and substantial market value. However, conventional production models face critical challenges including labor intensiveness (particularly in field management operations), escalating production costs, and limited mechanization adoption. Manual operations still dominate critical processes such as weeding, fertilization, flower induction spraying, and material transportation, constituting over 50% of total production costs [
2], with labor expenses showing a persistent upward trend. These traditional practices increasingly fail to meet the demands of large-scale standardized cultivation, necessitating mechanization breakthroughs to overcome industrial constraints.
Current pineapple field management primarily relies on manual or semi-mechanized operations. Research concerning mechanized equipment assisting human labor focuses predominantly on single-function machinery for specific tasks, such as weeders [
3,
4], fertilizer applicators [
5,
6], floral induction spraying machines [
7,
8], and material transport systems [
9,
10,
11]. While these enhance efficiency for individual operations, they commonly suffer from insufficient adaptability. On one hand, significant variations in planting density and ridge–furrow parameters exist among different pineapple varieties. Furthermore, canopy height can reach 120 cm [
12] at maturity, forming densely closed canopy zones that prevent the operation of general-purpose agricultural machinery. On the other hand, the topography of China’s primary pineapple-growing regions is complex, with a high proportion of hills and slopes. Existing equipment has limited capability to adjust for ridge spacing and height, hindering stable operation across varied terrain. Additionally, managing multiple operational stages necessitates frequent equipment changes, leading to resource wastage and increased operational costs.
Certainly, some researchers have directly investigated multifunctional pineapple field management machinery. For instance, Wang Binbin [
13] designed a compact, adjustable-wheelbase, high-clearance, narrow-tracked crawler chassis. This platform can be equipped with three operational modules: a boom spray component, a solid fertilizer applicator, and an extended platform-transport component. However, it cannot perform floral induction spraying tasks and has a limited payload capacity of only 600 kg. More researchers have explored the application of high-clearance chassis in other contexts. Wan Xingyu [
14] developed a high-clearance self-propelled chassis for rapeseed harvesting. Results indicated that the windrower exhibited average straight-line deviations of 0.73% and 1.28% on hard surfaces and soft soil, respectively. Under single-side braking conditions, the average turning radii were 1.91 m and 2.03 m on these respective surfaces, demonstrating stability during ascending/descending slopes, traversing field ridges, and crossing furrows. Du Xiaoqiang [
15] developed a tracked high-clearance chassis for vibrating harvesting of camellia fruit. Finite element modal analysis of the striking device frame and harvester frame using ANSYS software (version: 2021R2) determined the first six natural frequencies, confirming resonance avoidance. The camellia fruit harvest rate was 87.56%, with a blossom drop rate of 25.86%, meeting harvesting requirements. Hu Kai [
16] and Li Wei [
17] each researched high-clearance chassis for field spraying, both employing Proportional–Integral–Derivative (PID) control methods for four-wheel steering, validating the responsiveness, accuracy, and stability of their designed multi-wheel steering systems. However, the high-clearance chassis mentioned in these studies were developed for specific scenarios and lack height adjustability, rendering them unsuitable for pineapple field management operations. Given the demanding operating conditions of agricultural implements in hot, humid, muddy, and bumpy environments, which require characteristics such as high torque at low speeds, stable operation, and low maintenance costs, hydraulic drive systems exhibit significant advantages over electric drives. These advantages include superior torque output characteristics, higher power density, enhanced adaptability to harsh environments, greater layout flexibility, seamless compatibility with diesel engines, and inherent overload protection capabilities, along with proven technical maturity and effective cost control within the agricultural sector.
To address these challenges, our research team proposes an innovative hydraulic-driven modular pineapple field management platform with adjustable ground clearance (60–120 cm), based on our previously established machine-adapted full-process mechanization framework for pineapple production [
18]. This integrated system features five key functional modules: (1) a combined weeding-spraying unit; (2) a precision fertilization system; (3) targeted flower induction apparatus; (4) adaptive harvesting mechanism; and (5) a multi-purpose transport platform. Through coordinated module operation and dynamic height adjustment capabilities, the platform enhances operational stability on complex terrain while enabling functional scalability. Field trials demonstrate 40% reduction in labor input and 30% operational cost savings compared to conventional methods, providing a comprehensive mechanization solution for modern pineapple cultivation systems.
2. Methodology
2.1. Agronomic Mode of Pineapple Planting Suitable for Mechanization
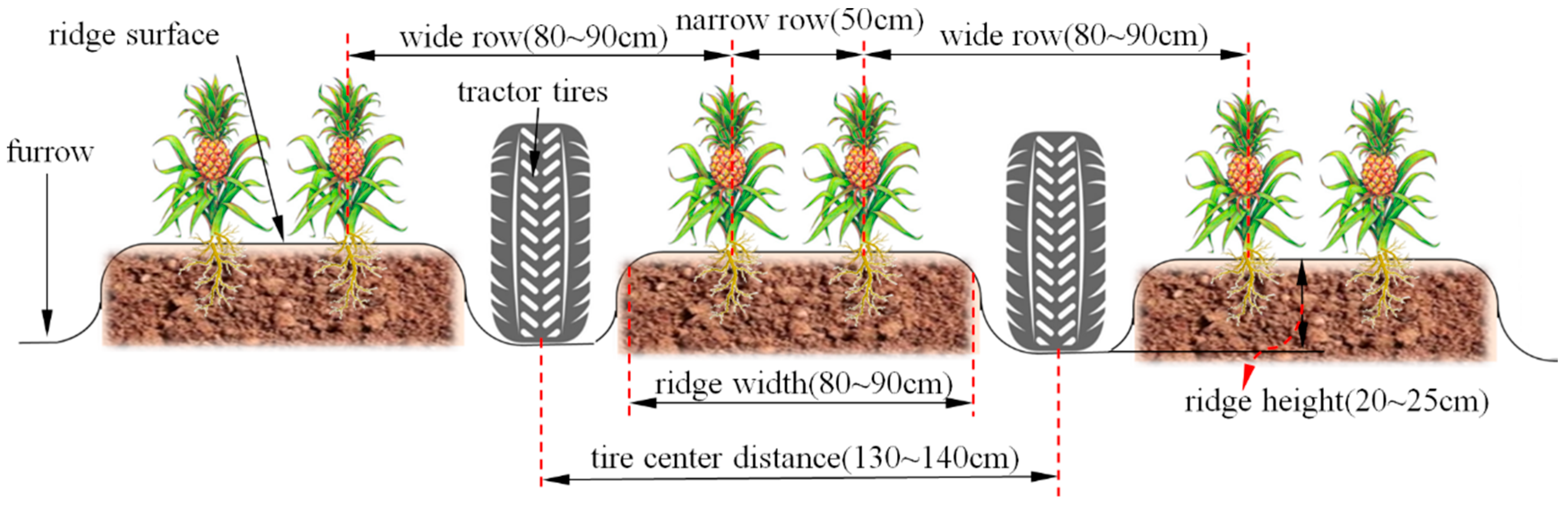
The mechanized pineapple production system employs an innovative ridged cultivation pattern characterized by a triangular staggered arrangement of wide–narrow double rows (
Figure 1). This optimized configuration features alternating inter-row spacings of 80–90 cm (wide rows) and 50 cm (narrow rows), with intra-row plant spacing maintained at 25 cm. The ridging parameters include a ridge height of 20–25 cm and furrow-to-furrow distance of 130–140 cm, which ensures compatibility with the wheelbases of mainstream tractor brands.
2.2. Complete Machine Structure
The modular height-adjustable pineapple field management platform (Chinese Academy of Tropical Agricultural Sciences, Agricultural Machinery Research Institute, Zhanjiang, China) is primarily composed of an operator cab, power system, locomotion system, hydraulic systems, chassis frame, and control cabinet. As illustrated in
Figure 2, the locomotion system integrates four hydraulic motor-driven ground wheels, with synchronized flow control for front and rear wheels on each side through flow-synchronizing valves. The hydraulic systems for both locomotion and operational functions are strategically installed beneath and within the cab compartment.
The chassis configuration employs a two-tier structural design: the upper section houses the operator cab and cargo compartment, while the lower section contains the locomotion mechanism and load-bearing framework. The load-bearing structure adopts a gantry-style design connected via sectionalized support legs, incorporating four hydraulic telescopic columns for vertical adjustment. The elevation of the management platform is controlled by operating the lift control lever, which enables synchronous extension or retraction of the hydraulic telescopic cylinders to achieve platform ascent or descent. The system automatically halts upon reaching its extreme positions, as designated in
Figure 2b, providing a height adjustment range of 50 cm to 120 cm. Power generation for both hydraulic circuits is achieved through an integrated diesel-powered system comprising a radiator-equipped diesel engine, hydraulic oil reservoir with dedicated cooling unit, and hydraulic pumps. The operational hydraulic circuit provides motive power for various agricultural implements including weed/pesticide sprayers, flowering induction sprayers, and foliar fertilizer applicators. The locomotion hydraulic system features a four-wheel drive configuration with an integrated safety mechanism, incorporating a self-locking device to prevent unintended vehicle movement on inclines. The system demonstrates exceptional terrain adaptability with a maximum grade ability of 20°, ensuring reliable operation on sloped plantation terrain; the relevant parameters are shown in
Table 1.
2.3. Operational Principle
The hydraulic power system is primarily driven by a diesel engine coupled with a hydraulic pump, functionally divided into two distinct circuits: Circuit I for operational hydraulics and Circuit II for travel dynamics. During normal operation, hydraulic fluid is drawn from the reservoir through the pump and subsequently directed to multiple proportional multi-way directional control valves. Among these, one circuit governs four travel motors, enabling precise speed modulation through a high–low speed control lever with analog signal integration, while directional control is achieved via solenoid-operated directional valves.
A separate circuit manages the extension/retraction of hydraulic cylinders for platform ground-clearance adjustment. An additional circuit interfaces with auxiliary hydraulic motors to power multi-functional spray heads capable of performing weed control, flower induction spraying, and foliar fertilizer application.
The system incorporates ergonomic detachable seats at the rear platform, facilitating seated pineapple harvesting operations with direct in situ fruit deposition. Notably, while the hydraulic oil cooler operates via electrical power, all other system components are hydraulically actuated, ensuring energy efficiency and robust performance in agricultural field conditions. This integrated hydraulic architecture (as illustrated in
Figure 3) demonstrates optimized power distribution and operational flexibility for specialized horticultural machinery.
2.4. Key Parameter
Steering-Positioning Parameter Design
Steering-positioning parameters (α) play a critical role in ensuring handling stability, extending tire service life, and guaranteeing operational safety of vehicles [
19,
20]. This study focuses on the design of these parameters for the high ground-clearance adjustable pineapple field management platform, considering its unique steering system architecture and operational requirements in agricultural applications.
- (a)
Steering-Axis Inclination
The kingpin inclination angle, defined as the angular deviation between the wheel’s central plane and the vehicle’s vertical plane (
Figure 4), requires careful optimization. An appropriate inclination angle minimizes tire abrasion, reduces hub bearing loads, and enhances directional stability.
Given the platform’s operational characteristics during weed control, flowering induction spraying, and foliar fertilization—where progressive reduction of chemical loads induces significant variations in sprung mass—a minimal variation range of kingpin inclination angle under dynamic loading conditions is essential. Through comprehensive analysis of international counterparts and fundamental steering system design specifications [
21,
22], the initial kingpin inclination angle was determined as 1.5°.
- (b)
Front Toe Angle
Toe-in configuration, quantified as the dimensional difference between front- and-rear wheel center planes (
Figure 5), serves to eliminate lateral slippage during vehicle motion and mitigate wear. The mathematical expression for toe-in calculation
Ls is presented in Equation (1):
where
d = rim diameter at the toe in, mm;
S = front and rear wheelbase, mm;
l = length of the tire ground imprint, mm;
r = tire rolling radius, mm;
α = front wheel inclination, (°).
The length of tire grounding mark is shown in Formula (2):
where
D = nominal outer diameter of the front wheel tire, mm:
Δx = radial shape variable of the wheel under vertical load.
The calculation method of Δ
x is shown in Formula (3) [
17]:
where
C = tire coefficient;
K = coefficient;
w = tire section width, mm;
G1 = vertical load on the front axle of the platform, N;
P = tire pressure, MPa.
According to the actual measured data and Formulas (1)–(3), the toe in angle of the front wheel is about 0.247°.
2.5. Caster Angle
In conventional vehicles, the kingpin is transversely arranged, whereas in high-clearance management platforms, this configuration is replaced by a steering vertical spindle. Consequently, the parameters conventionally referred to as kingpin caster angle and kingpin inclination angle are herein defined as vertical spindle caster angle (
β) and vertical spindle inclination angle, respectively. As illustrated in
Figure 6, the vertical spindle caster angle α represents the angular deviation between the spindle’s central axis and the vertical ground normal. This critical design parameter facilitates automatic wheel-return torque generation, ensuring operational stability during vehicle motion. While increased α values enhance safety through amplified tire deflection counterforce, excessive angles may lead to increased steering resistance, due to elevated reactive forces opposing wheel rotation.
Therefore, optimal caster angles are typically constrained within 3° to balance steering efficiency and stability requirements. The geometric configuration creates a mechanical advantage where the intersection point (a) between the spindle axis and ground plane precedes the tire–ground contact point (b). During steering maneuvers, a centrifugal force (
F0) normal to the wheel plane acts at point b, generating a restoring moment (
Mβ) about the spindle axis. The moment arm (
l1) for this torque corresponds to the perpendicular distance between contact point b and the spindle axis o-a, calculated through Equation (4).
During steering operations where the applied torque remains below the critical restoring moment threshold (
Mβ), a torque allocation mechanism governs directional control dynamics. In such scenarios, a portion of the restoring moment is dissipated through frictional resistance inherent to the steering system, while the residual torque manifests as an effective restoring-moment component (
Mβ1). This mechanical energy distribution establishes functional relationships between centrifugal ground force
(F0), steering input force (
Fβ1), and resultant restoring moment (
Mβ1), as formulated in Equations (5)–(7) [
23].
where
g = gravitational acceleration, 9.8 m/s2;
S = track width, m;
R = turning radius, m;
F1 = front axle load, N;
V = vehicle velocity, m/s;
Ds = steering wheel diameter, m;
iω = angular transmission ratio of steering gear (assigned 10);
η1 = forward efficiency of steering system (assigned 0.75);
η2 = reverse efficiency of steering system (assigned 0.60).
2.6. Vertical Spindle Camber Angle
The vertical spindle camber angle (
δ) is defined as the angular deviation between the steering spindle axis and the vertical ground normal (
Figure 7). This geometric parameter serves a dual function: generating active self-aligning torque to stabilize steering dynamics, and optimizing load distribution across wheel bearings, to mitigate component wear.
During tire deflection under steering forces, the preconfigured vertical spindle caster angle induces vertical displacement (
h) of the wheel–body assembly. Upon force removal, ground–tire interaction converts frictional energy into restoring moment (
Mβ), enabling automatic wheel re-centering. The resultant lift height (
h) is quantified by Equation (8).
where
l4 = steering arm length, m.
When applied steering torque falls below the critical restoring moment threshold (Mδ1), torque allocation follows:
Frictional dissipation: Counteracts steering system resistance.
Effective restoring component: Generates net self-aligning moment (Mδ1); the governing relationships for (Mδ1) and corresponding steering force (Fδ1) are derived in Equations (9) and (10).
The synergistic effects of vertical spindle caster and camber angles produced are shown as Equations (11) and (12).
Parametric analysis of Equations (11) and (12) yields optimal spindle angles, balancing steering effort and stability. Computational results recommend initial camber angle δ = 5.3°, subject to iterative refinement through hardware-in-the-loop testing.
2.7. Performance Analysis
The chassis of the pineapple field management platform was designed as a straddle-type configuration, drawing upon existing structural frameworks of high-clearance self-propelled agricultural machinery. The operator’s station is strategically positioned at the front of the chassis to ensure optimal visibility, with an ergonomic control panel installed on the left side of the cockpit to enhance operational efficiency and driving safety. A modular pesticide-tank system was implemented, featuring detachable components that permit flexible installation of tanks with varying capacities, according to operational requirements.
To optimize structural integrity while minimizing overall weight, the main chassis beam utilizes 65Mn steel rectangular tubing (180 mm × 65 mm × 8 mm cross-section). The support framework for the operator cabin and lifting platform employs Q355 steel rectangular members (90 mm × 55 mm × 5 mm cross-section), achieving an optimal balance between strength-to-weight ratio and durability. This material selection and structural configuration ensure sufficient load-bearing capacity for field operations, while maintaining maneuverability in pineapple plantation environments. The overall chassis configuration is illustrated in
Figure 8.
Finite Element Simulation Analysis of Chassis Frame
To validate the structural integrity of the designed chassis under anticipated loading conditions, comprehensive strength and stiffness assessments were conducted through finite element analysis (FEA). A refined chassis model was developed using ANSYS Mechanical APDL with t-mm-s-MPa unit consistency, incorporating the material properties of Q355 structural steel: elastic modulus 206 GPa, yield strength 355 MPa, Poisson’s ratio 0.30, and mass density 7.85 g/cm3.
The meshing strategy employed an adaptive meshing technique with system-optimized element sizing, achieving convergence balance between computational accuracy and efficiency. The resulting mesh configuration contained 2,464,340 nodes and 1,129,996 hexahedral elements, with local refinement applied to stress-concentration regions. Boundary conditions simulated realistic field operations through the following:
- (1)
Full constraint of wheel–ground interaction points.
- (2)
Distributed static load equivalent to 2-ton payload capacity.
- (3)
Dynamic load factor of 10 g acceleration for worst-case scenario analysis.
Two critical operational states were investigated:
The nonlinear static analysis accounted for both material plasticity and large deformation effects. Stress distribution patterns and deformation characteristics, as illustrated in
Figure 9, demonstrated maximum von Mises stresses of 327.4 MPa in the main beam connections during descent phase, corresponding to a safety factor of 1.09, relative to the material yield strength. The maximum displacement of 5.8 mm observed at the cantilevered section remained within permissible deflection limits for agricultural machinery. These results confirm that the chassis design meets structural requirements, while maintaining 22.7% mass reduction compared to conventional configurations, through optimized material distribution.
As illustrated in
Figure 9, under full-load conditions, the equivalent elastic-strain values for the chassis frame in descending and ascending states (
Figure 9a,d) measure 0.000317 and 0.00125, respectively. The maximum equivalent stress (
Figure 9b,e), reaching 48.27 MPa and 231.6 MPa respectively, predominantly occurs at the interface region connecting the crossbeam and plate components. Deformation analysis reveals distinct spatial patterns: the maximum displacement in descending state (1.14 mm,
Figure 9c) manifests at the central section, while the ascending state’s peak deformation (4.31 mm,
Figure 9f) shifts to the middle-rear section. These computational results demonstrate that the chassis configuration satisfactorily meets operational requirements for pineapple field management applications. Notably, the identified stress concentration zones and deformation characteristics provide critical insights for structural reinforcement of vulnerable areas, design optimization strategies, and subsequent lightweight modifications, as referenced in prior research [
24].
2.8. Stability Performance
During field operations in pineapple plantations, the management platform must maintain sufficient driving stability to accommodate complex terrain conditions. The longitudinal stability of the system (full-load status) is evaluated separately in descending and ascending operational states. Platform stability is quantified by determining the maximum slope angle at which the chassis can remain stationary under braking conditions without experiencing rollover or slippage [
25].
For uphill motion analysis under constant velocity (
Figure 10a), we establish the mechanical equilibrium equations formulated in Equation (13), incorporating the following assumptions: negligible air resistance, low-speed operation, and rigid-tire modeling.
where
Ft1,
Ft2 = Soil tangential forces on front/rear wheels;
G = Total gravitational force of the platform;
φ = Critical slope inclination angle;
Fn1, Fn2 = Soil normal forces on front/rear wheels;
q = Vertical height from center of gravity to ground;
l3 = Horizontal distance from center of gravity to rear axle.
The critical rollover threshold occurs when front wheels lose contact with the soil surface (
Ft1 = 0), yielding the maximum sustainable slope angle, as derived in Equation (14).
When analyzing downhill motion of the pineapple management platform chassis under constant velocity conditions (
Figure 10b), we similarly establish the mechanical equilibrium equations formulated in Equation (15), maintaining the following validated assumptions:
- (1)
Aerodynamic resistance exclusion.
- (2)
Low-speed descent regime.
- (3)
Non-deformable tire characteristics.
The critical downhill rollover threshold occurs when the rear wheels lose ground contact, corresponding to the vanishing of rear-wheel tangential force (
Ft2 = 0). Through equilibrium resolution of the governing mechanical equations, we derive the maximum sustainable downhill inclination angle, as formulated in Equation (16).
Analogously, the mechanical equilibrium framework was extended to analyze ascending-state stability, through complementary free-body diagrams (
Figure 10c,d). The elevated COG (center of gravity) position during platform elevation introduces distinct parametric variations in rollover thresholds.
From Equations (14) and (16), the critical longitudinal rollover angles demonstrate explicit dependence on COG spatial parameters. Platform stability on slopes is maintained when the gravitational vector remains within the polygon defined by wheel–ground contact points, preventing moment-arm development about the critical axis. Parametric analysis was conducted through CAD/CAE integration using CAXA 3D modeling software, extracting precise mass distribution characteristics:
Vertical COG height: q = 728 mm
Horizontal COG-rear axle distance: l3 = 1670 mm
Substitution into the derived equations yields the following:
Descending State
Uphill limit: 57.85°
Downhill limit: 68.43°
Ascending State
Uphill limit: 46.29°
Downhill limit: 53.67°
In addition, pineapple may also be planted along the slope to reduce rainwater scouring. Therefore, the calculation method of the roll angle of the pineapple field management platform is as follows:
where
ξ = roll angle.
It is calculated that the maximum inclination when moving along the slope is 43.78°.
3. Results and Discussion
Field experiments were conducted at the Institute of Agricultural Machinery, Chinese Academy of Tropical Agricultural Sciences (21.159° N, 110.269° E) during 2024, to evaluate agricultural operations in pineapple cultivation. The comprehensive trials comprised three key components: (1) flower-promoting spray application, (2) fruit harvesting operations, and (3) postharvest transportation protocols.
Figure 11 illustrates the experimental setup and field implementation of these mechanized agricultural processes. All trials were performed under standardized tropical conditions characteristic of the Leizhou Peninsula region, with temperature and humidity parameters recorded throughout the experimental periods to ensure environmental consistency. The average temperature is 17 ° C in February and 30 ° C in July.
Field performance assessments were conducted using standardized measurement tools, including a tape measure (SJG-100, Zhengzhou, Henan, China, resolution: 1 mm), platform scale (YihengTCS-03, Hengyang, Hunan, China, capacity: 500 kg), digital stopwatch M.Air-J893, Zhejiang, China, and hydraulic pressure gauge (BZ-GM523, Foshan, Guangdong, China, range: 0–10 MPa). Particle-free water under ambient conditions (25 ± 2 °C) served as the test medium for hydraulic system evaluations. The pineapple field management platform prototype underwent systematic testing across three critical operational parameters [
26,
27]:
- (1)
Travel velocity: triplicate trials were performed on dry, level paved surfaces (concrete/asphalt) under maximum throttle settings. Velocity (v, m/s) was calculated via Equation (19).
where
s = the walking distance;
t = the walking time.
- (2)
Turning radius: steering performance was quantified through three full 360° rotations at minimal forward speed (<0.2 m/s) with steering wheels locked at extreme left/right positions. The inner trajectory radius of front tires was measured post-rotation using laser rangefinder-assisted ground marking.
- (3)
Grade ability: slope negotiation capability was evaluated on engineered inclines (5–25° gradient) [
28] using onboard inertial measurement units to record actual tilt angles during ascent at creep speed (0.1 m/s).
The test was repeated three times for each index and the average value taken. The test results are shown in
Table 2.
- (4)
Operational efficiency: flower-inducing efficiency was determined through timed trials using 35–40 mL spray volumes per plant. Mean operation duration per plant (0.7 ± 0.05 s) yielded a theoretical field capacity of 0.23 hm2/h at standard planting density (45,000 plants/hm2). Fruit detachment-to-transport cycle time (2.1 ± 0.3 s per fruit) was measured via synchronized video analysis, translating to a harvesting efficiency of 0.11 hm2 /h under equivalent density conditions. Compared with manual operations, the overall operational efficiency has been significantly improved, while substantially reducing workers’ labor intensity.
Field test results demonstrate that the pineapple field management platform achieves a forward travel speed ranging from 0.16 to 1.77 m/s and a reverse travel speed ranging from 0.11 to 0.28 m/s. Key design parameters, such as the wheel camber angle, kingpin inclination, and kingpin caster angle, were appropriately selected, resulting in a minimum turning radius of 2.9 m. The structural strength validation results for the cargo box aligned with simulation data; when fully loaded with pesticide, the platform attained a maximum climbing angle of 20°. Overall operational efficiency was comparable to that of skilled workers, meeting the anticipated design requirements. Moreover, the platform significantly reduces operator physical exertion and lowers operational costs. The field test results largely met the design specifications, confirming the platform’s capability to fulfill diverse operational demands in pineapple field management.
4. Conclusions
Based on the wide–narrow double-row pineapple planting pattern, a multi-module height-adjustable field management platform was designed, incorporating its working principle, key steering parameters (minimum turning radius: 2.9 m), and powertrain system. Theoretical analysis of the chassis indicated that the ultimate overturning angles were 57.85° uphill and 46.29° downhill during descent, and 68.43° uphill and 53.67° downhill during ascent. Three-dimensional modeling and ANSYS finite element analysis of the frame revealed that under full load, the equivalent elastic strains for descent and ascent states were 0.000317 and 0.00125, respectively. The maximum equivalent stresses (located at beam–plate joints) were 48.27 MPa and 231.6 MPa for descent and ascent, respectively. Maximum deformation occurred centrally during descent (1.14 mm total) and mid-rear during ascent (4.31 mm total). Field trials demonstrated forward and reverse speeds ranging from 0.16–1.77 m/s to 0.11–0.28 m/s, respectively, with a maximum gradability of 20°. The platform effectively performs weeding, spraying, fertilization, flower induction, harvesting, and transportation, meeting operational requirements for pineapple field management.



 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}