The Discrete Taxonomic Classification of Soils Subjected to Diverse Treatment Modalities and Varied Fertility Grades Utilizing Machine Olfaction

Abstract
1. Introduction
2. Materials and Methods
2.1. Sample Preparation
2.2. Standards for Soil Classification
2.2.1. Soil Treatments
2.2.2. Soil Fertility Grades
2.3. Machine Olfaction System
2.4. Sensor Array Construction
2.5. Data Acquisition
2.6. Eigenvalue Extraction
2.7. Feature Space Optimization
2.8. Classification Models
2.8.1. RF Classification Model
2.8.2. MLP Classification Model
2.8.3. MLP-RF Classification Model
2.9. Model Evaluation Indicators
3. Results and Discussion
3.1. Output Signal Acquisition
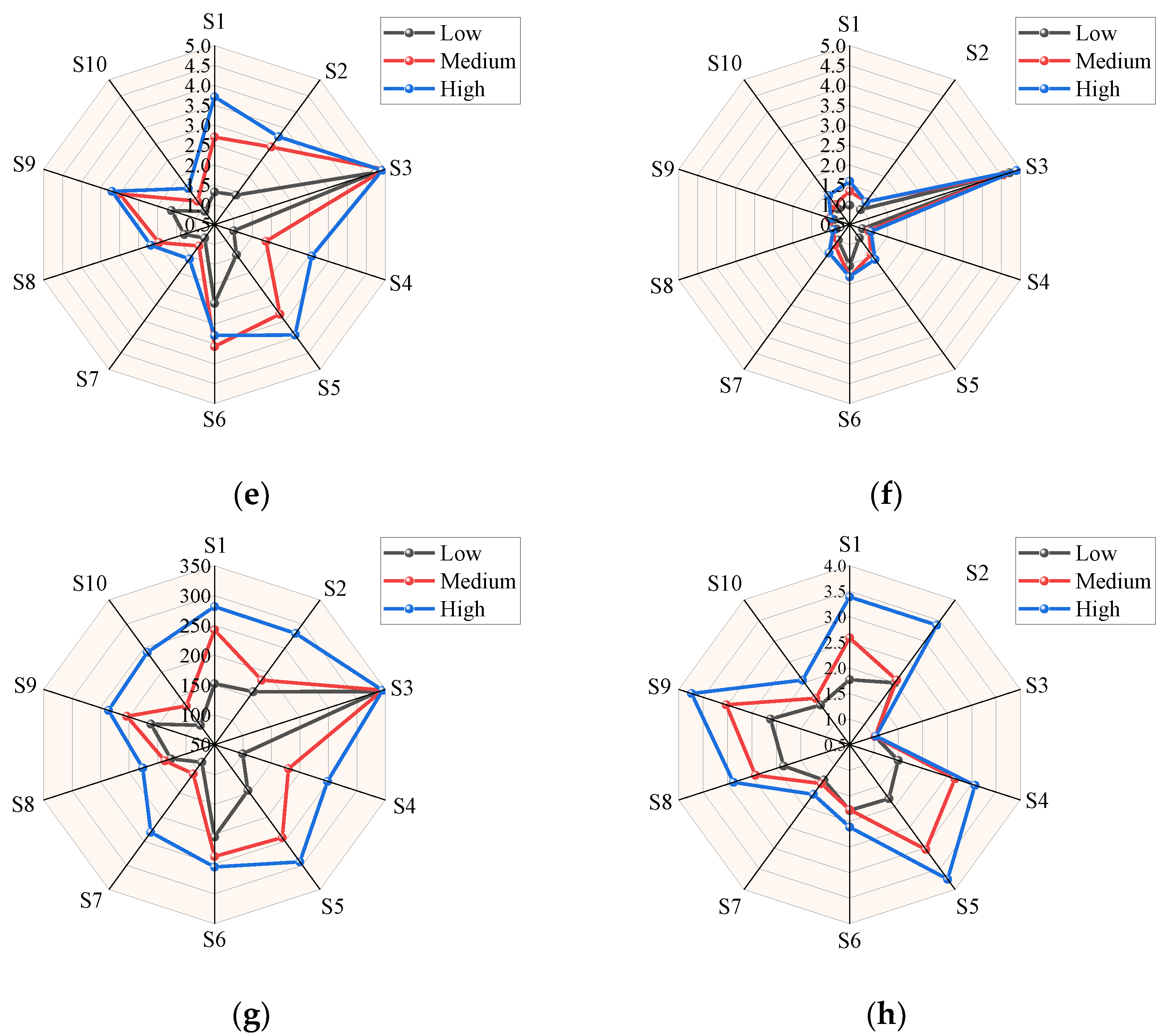
3.2. Feature Space Construction
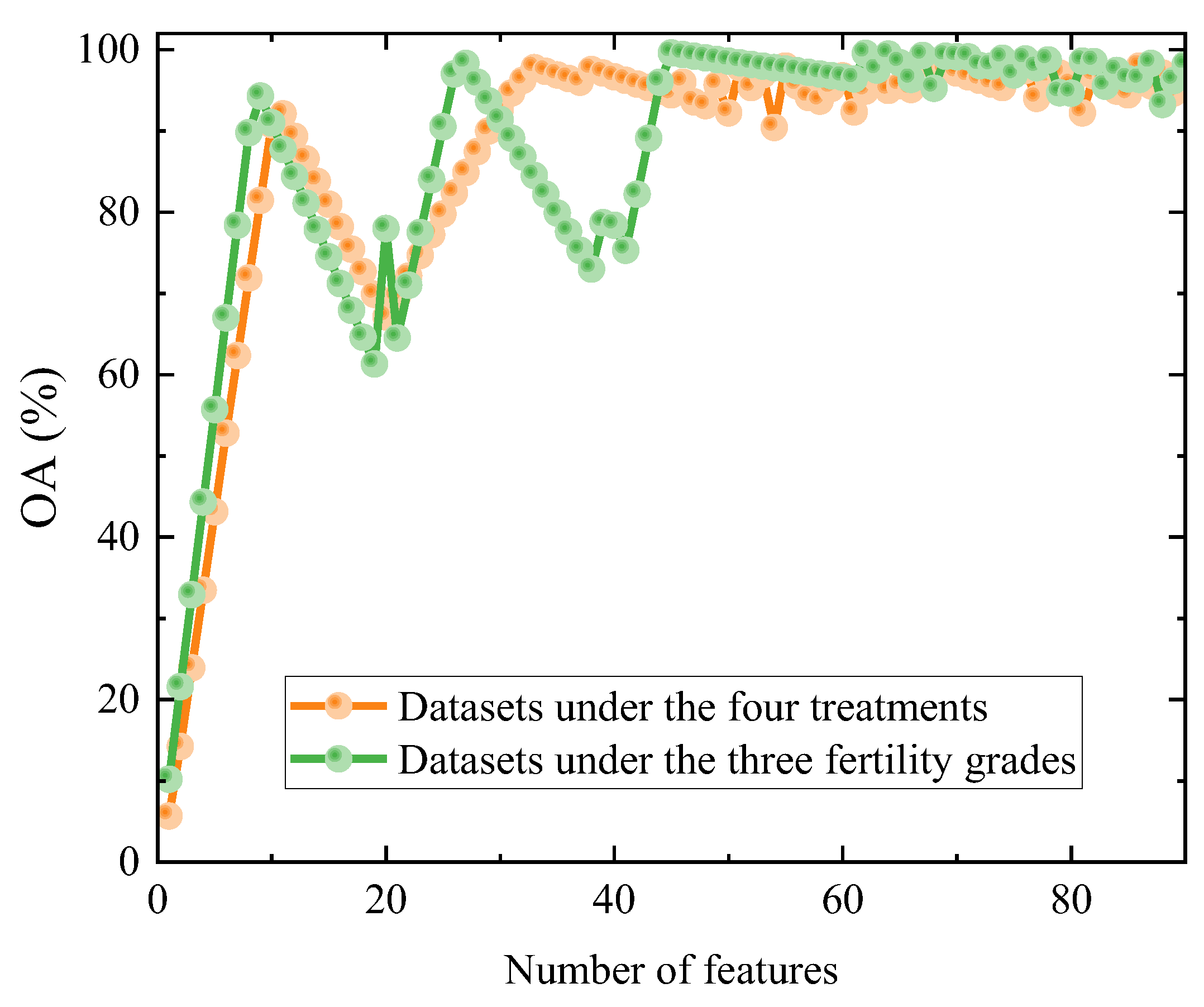
3.3. Feature Space Optimization Results
3.4. Modeling Results
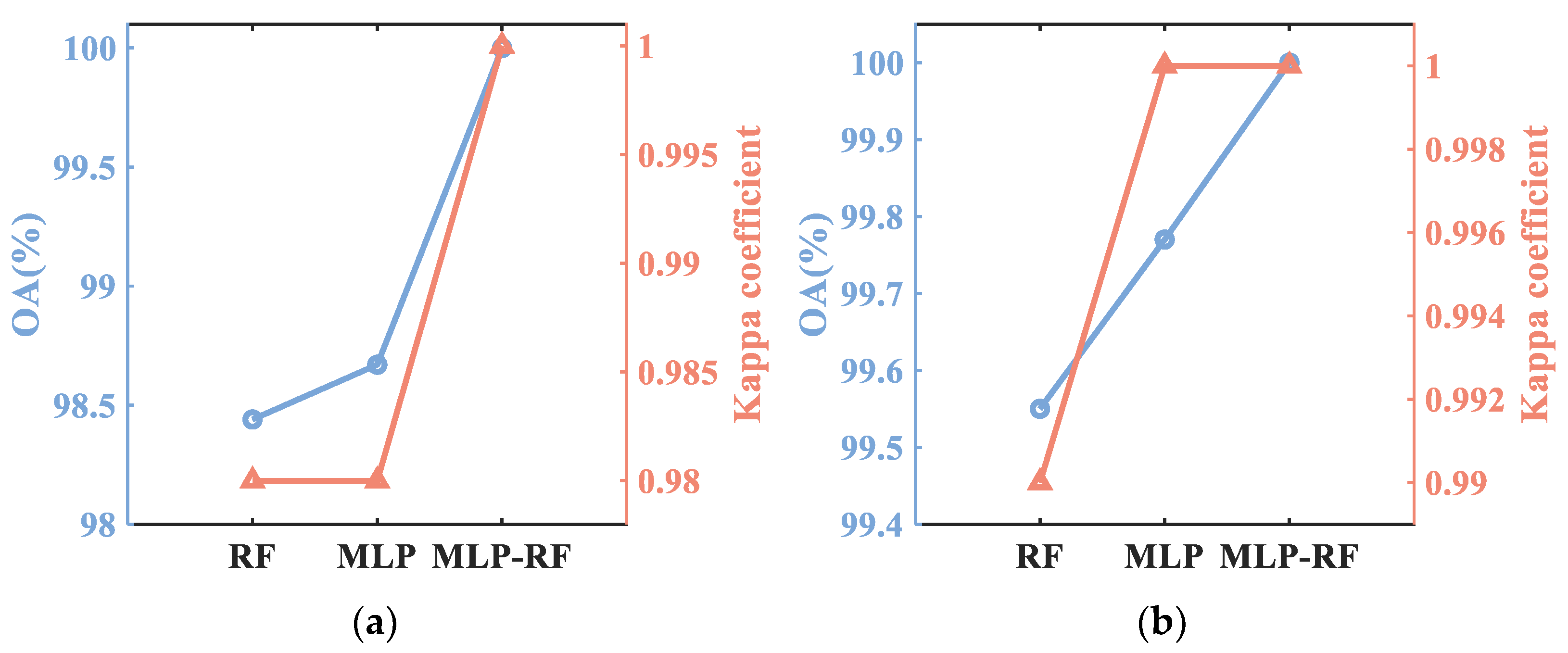
3.4.1. Modeling Performance
3.4.2. Modeling Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Williams, H.; Colombi, T.; Keller, T. The influence of soil management on soil health: An on-farm study in southern Sweden. Geoderma 2020, 360, 114010. [Google Scholar] [CrossRef]
- Lehman, R.; Osborne, S.; McGraw, K. Stacking Agricultural Management Tactics to Promote Improvements in Soil Structure and Microbial Activities. Agronomy 2019, 9, 539. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, L.; Zhu, S.; Sun, H.; Xu, C.; Fu, J.; Ning, T. Sensitivities of Physical and Chemical Attributes of Soil Quality to Different Tillage Management. Agronomy 2022, 12, 1153. [Google Scholar] [CrossRef]
- Fors, R.; Sorci-Uhmann, E.; Santos, E.; Silva-Flores, P.; Abreu, M.; Viegas, W.; Nogales, A. Influence of Soil Type, Land Use, and Rootstock Genotype on Root-Associated Arbuscular Mycorrhizal Fungi Communities and Their Impact on Grapevine Growth and Nutrition. Agriculture 2023, 13, 2163. [Google Scholar] [CrossRef]
- Potapov, A.; Beaulieu, F.; Birkhofer, K.; Bluhm, S.; Degtyarev, M.; Devetter, M.; Goncharov, A.; Gongalsky, K.; Klarner, B.; Korobushkin, D. Feeding habits and multifunctional classification of soil-associated consumers from protists to vertebrates. Biol. Rev. 2022, 97, 1057–1117. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Lee, D.; Kim, T.; Kim, G.; Kim, H.; Sim, T.; Kim, Y. One-shot classification-based tilled soil region segmentation for boundary guidance in autonomous tillage. Comput. Electron. Agric. 2021, 189, 106371. [Google Scholar] [CrossRef]
- Lee, D.; Kim, Y.; Sonn, Y.; Kim, K. Comparison of Soil Taxonomy (2022) and WRB (2022) Systems for Classifying Paddy Soils with Different Drainage Grades in South Korea. Land 2023, 12, 1204. [Google Scholar] [CrossRef]
- Li, Y.; Wu, J.; Wang, Y.; Hu, Y. Precision agriculture technologies for sustaining smallholder farming systems. J. Integr. Agric. 2019, 18, 771–781. [Google Scholar]
- Xu, J.; Han, H.; Ning, T.; Li, Z.; Lal, R. Long-term effects of tillage and straw management on soil organic carbon, crop yield, and yield stability in a wheat-maize system. Eur. J. Agron. 2019, 233, 33–40. [Google Scholar] [CrossRef]
- Mutuku, E.; Vanlauwe, B.; Roobroeck, D.; Boeckx, P.; Cornelis, W. Physico-chemical soil attributes under conservation agriculture and integrated soil fertility management. Nutr. Cycl. Agroecosyst. 2021, 120, 145–160. [Google Scholar] [CrossRef]
- Smith, J.; Johnson, A.; Doe, R. Advances in Soil Assessment Techniques. Soil Sci. Soc. Am. J. 2015, 79, 714–725. [Google Scholar]
- Jones, M.; White, K.; Robinson, P. Real-time Soil Monitoring Technologies: A Review. Environ. Sci. Technol. 2018, 52, 7719–7732. [Google Scholar]
- Brown, C.; Miller, E.; Davis, R. Enhancing Spatial Resolution in Large-Scale Soil Testing through Advanced Classification Methods. J. Agric. Sci. 2020, 10, 112–124. [Google Scholar]
- Maynard, J.; Salley, S.; Beaudette, D.; Herrick, J. Numerical soil classification supports soil identification by citizen scientists using limited, simple soil observations. Soil Sci. Soc. Am. J. 2020, 84, 1675–1692. [Google Scholar] [CrossRef]
- Vibhute, A.; Kale, K.; Gaikwad, S. Machine learning-enabled soil classification for precision agriculture: A study on spectral analysis and soil property determination. Appl. Geomat. 2024. [Google Scholar] [CrossRef]
- Xu, H.; Xu, D.; Chen, S.; Ma, W.; Shi, Z. Rapid Determination of Soil Class Based on Visible-Near Infrared, Mid-Infrared Spectroscopy and Data Fusion. Remote Sens. 2020, 12, 1512. [Google Scholar] [CrossRef]
- Hark, R.; Throckmorton, C.; Harmon, R.; Plumer, J.; Harmon, K.; Harrison, J.; Hendrickx, J.; Clausen, J. Multianalyzer Spectroscopic Data Fusion for Soil Characterization. Appl. Sci. 2020, 10, 8723. [Google Scholar] [CrossRef]
- Duan, M.Q.; Zhang, X.G. Using remote sensing to identify soil types based on multiscale image texture features. Comput. Electron. Agric. 2021, 187, 106272. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, L.; Zhuang, Q.; Chen, D.; Sun, T. Mapping Cropland Soil Nutrients Contents Based on Multi-Spectral Remote Sensing and Machine Learning. Agriculture 2023, 13, 1592. [Google Scholar] [CrossRef]
- Haugen, H.; Devineau, O.; Heggenes, J.; Ostbye, K.; Linlokken, A. Predicting Habitat Properties Using Remote Sensing Data: Soil pH and Moisture, and Ground Vegetation Cover. Remote Sens. 2022, 14, 5207. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, H.; Chen, X. Predicting Organic Matter Content, Total Nitrogen and pH Value of Lime Concretion Black Soil Based on Visible and Near Infrared Spectroscopy. Eurasian Soil Sci. 2021, 54, 1681–1688. [Google Scholar] [CrossRef]
- Carrillo, V.; Heenkenda, M.; Nelson, R.; Sahota, T.; Serrano, L. Deep learning in land-use classification and geostatistics in soil pH mapping: A case study at Lakehead University Agricultural Research Station, Thunder Bay, Ontario, Canada. J. Appl. Remote Sens. 2022, 16, 034519. [Google Scholar] [CrossRef]
- Seesaard, T.; Goel, N.; Kumar, M.; Wongchoosuk, C. Advances in gas sensors and electronic nose technologies for agricultural cycle applications. Comput. Electron. Agric. 2022, 193, 106673. [Google Scholar] [CrossRef]
- Okur, S.; Sarheed, M.; Huber, R.; Zhang, Z.J.; Heinke, L.; Kanbar, A.; Woll, C.; Nick, P.; Lemmer, U. Identification of Mint Scents Using a QCM Based E-Nose. Chemosensors 2021, 9, 31. [Google Scholar] [CrossRef]
- Wesoly, M.; Przewodowski, W.; Ciosek-Skibinska, P. Electronic noses and electronic tongues for the agricultural purposes. Trac-Trends Anal. Chem. 2023, 164, 117082. [Google Scholar] [CrossRef]
- Khorramifar, A.; Karami, H.; Wilson, A.D.; Sayyah, A.H.A.; Shuba, A.; Lozano, J. Grape Cultivar Identification and Classification by Machine Olfaction Analysis of Leaf Volatiles. Chemosensors 2022, 10, 125. [Google Scholar] [CrossRef]
- Bieganowski, A.; Jaromin-Glen, K.; Guz, Ł.; Łagód, G.; Jozefaciuk, G.; Franus, W.; Suchorab, Z.; Sobczuk, H. Evaluating Soil Moisture Status Using an e-Nose. Sensors 2016, 16, 886. [Google Scholar] [CrossRef] [PubMed]
- Lavanya, S.; Krishna Murthy, V. Suitability of Electronic Nose as a Reflective Tool to the Measurement of Soil Fertility Factors. Eng. Technol. 2018, 13, 39–47. [Google Scholar] [CrossRef]
- Ba, F.; Peng, P.; Zhang, Y.; Zhao, Y. Classification and Identification of Contaminants in Recyclable Containers Based on a Recursive Feature Elimination-Light Gradient Boosting Machine Algorithm Using an Electronic Nose. Micromachines 2023, 14, 2047. [Google Scholar] [CrossRef] [PubMed]
- Yu, D.B.; Gu, Y. A Machine Learning Method for the Fine-Grained Classification of Green Tea with Geographical Indication Using a MOS-Based Electronic Nose. Foods 2021, 10, 795. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Liu, H.; He, Y.; Chen, B.; Xiao, L.; Fei, Y.; Wang, G.; Yu, H.; Chen, C. Combined application of electronic nose analysis and back-propagation neural network and random forest models for assessing yogurt flavor acceptability. J. Food Meas. Charact. 2020, 14, 573–583. [Google Scholar] [CrossRef]
- Barman, U.; Choudhury, D. Soil texture classification using multi class support vector machine. Inf. Process. Agric. 2020, 7, 318–332. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.; Zhou, X. Soil organic matter content classification based on random forest algorithm. J. Resour. Ecol. 2019, 9, 542–548. [Google Scholar]
- Mouazen, A.M.; Alhwaimel, S.A.; Kuang, B.; Waine, T. Multiple on-line soil sensors and data fusion approach for delineation of water holding capacity zones for site specific irrigation. Soil Tillage Res. 2014, 143, 95–105. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, Z.; Xie, Y. Texture analysis in soil moisture mapping using satellite imagery. Remote Sens. 2018, 10, 789. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef]
- Jones, M.; White, K.; Robinson, P. Recurrent Neural Networks for Temporal Soil Moisture Prediction. J. Hydrol. 2020, 578, 124086. [Google Scholar]
- Peng, J.; Loew, A.; Merlin, O. Deep convolutional neural networks for soil moisture retrieval from remote sensing data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3329–3345. [Google Scholar]
- Bai, R.H.; Shen, F.; Zhang, Z.P. An integrated machine-learning model for soil category classification based on CPT. Multiscale Multidiscip. Model. Exp. Des. 2023. [Google Scholar] [CrossRef]
- Phaisangittisagul, E.; Nagle, H. Enhancing multiple classifier system performance for machine olfaction using odor-type signatures. Sens. Actuators B Chem. 2007, 125, 246–253. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, C.; Li, Z.; Zhang, X.; Hu, W. Investigating the pyrolysis products of soil organic matter using TG–MS and Py–GC/MS. J. Anal. Appl. Pyrolysis 2016, 119, 25–33. [Google Scholar]
- De la Rosa, J.; Faria, S.; Varela, M.; Knicker, H.; Gonzalez-Vila, F.; Gonzalez-Perez, J.; Keizer, J. Characterization of wildfire effects on soil organic matter using analytical pyrolysis. Geoderma 2012, 191, 24–30. [Google Scholar] [CrossRef]
- Yang, C.; Lu, S. Pyrolysis temperature affects phosphorus availability of rice straw and canola stalk biochars and biochar-amended soils. J. Soils Sediments 2021, 21, 2817–2830. [Google Scholar] [CrossRef]
- White, D.; Beyer, L. Pyrolysis gas chromatography mass spectrometry and pyrolysis gas chromatography flame ionization detection analysis of three Antarctic soils. J. Anal. Appl. Pyrolysis 1999, 50, 63–76. [Google Scholar] [CrossRef]
- Li, M.; Zhu, Q.; Liu, H.; Xia, X.; Huang, D. Method for detecting soil total nitrogen contents based on pyrolysis and artificial olfaction. Int. J. Agric. Biol. Eng. 2022, 15, 167–176. [Google Scholar] [CrossRef]
- Cang, S.; Partridge, D. Feature ranking and best feature subset using mutual information. Neural Comput. Appl. 2004, 13, 175–184. [Google Scholar] [CrossRef]
- Jiang, W.; Dong, Z.; Sun, M.; Liu, L.; He, G. NOx emissions estimation of boiler based on mutual information feature reconstruction and optimization of extreme learning machine. Meas. Sci. Technol. 2023, 34, 105022. [Google Scholar] [CrossRef]
- Kennard, R.; Stone, L. Computer aided design of experiments. Technometrics 1969, 11, 137–148. [Google Scholar] [CrossRef]
- Relander, F.; Ruesch, A.; Yang, J.; Acharya, D.; Scammon, B.; Schmitt, S.; Crane, E.; Smith, M.; Kainerstorfer, J. Using near-infrared spectroscopy and a random forest regressor to estimate intracranial pressure. Neurophotonics. 2022, 9, 16. [Google Scholar] [CrossRef]
- Chala, A.; Ray, R. Assessing the Performance of Machine Learning Algorithms for Soil Classification Using Cone Penetration Test Data. Appl. Sci. 2023, 13, 5758. [Google Scholar] [CrossRef]
- Rumelhart, D.; Hinton, G.; Williams, R. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Yuan, C.; Moayedi, H. The performance of six neural-evolutionary classification techniques combined with multi-layer perception in two-layered cohesive slope stability analysis and failure recognition. Eng. Comput. 2020, 36, 1705–1714. [Google Scholar] [CrossRef]
- Xu, S.; Lü, E.; Lu, H.; Zhou, Z.; Wang, Y.; Yang, J.; Wang, Y. Quality Detection of Litchi Stored in Different Environments Using an Electronic Nose. Sensors 2016, 16, 852. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, J.; Wu, Z.; Lian, J.; Ye, W.; Yu, F. Tree Species Classification Using Plant Functional Traits and Leaf Spectral Properties along the Vertical Canopy Position. Remote Sens. 2022, 14, 6227. [Google Scholar] [CrossRef]
- Shamaoma, H.; Chirwa, P.; Zekeng, J.; Ramoelo, A.; Hudak, A.; Handavu, F.; Syampungani, S. Use of Multi-Date and Multi-Spectral UAS Imagery to Classify Dominant Tree Species in the Wet Miombo Woodlands of Zambia. Sensors 2023, 23, 2241. [Google Scholar] [CrossRef]
- Nguyen, M.; Costache, R.; Sy, A.; Ahmadzadeh, H.; Le, H.; Prakash, I.; Pham, B. Novel approach for soil classification using machine learning methods. Bull. Eng. Geol. Environ. 2022, 81, 468. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Li, X. Gas identification with electronic nose using deep belief networks. Sens. Actuators B Chem. 2018, 255, 468–478. [Google Scholar]
- Chen, Z.; Li, Y.; Liu, Y. An intelligent gas identification system based on a hybrid model of MLP and random forest. Sens. Actuators B Chem. 2020, 320, 128341. [Google Scholar]
- Schmidt, K.; Skidmore, A.K.; Klooster, S. Combining random forest and MLP neural network to improve the classification of smallholder farm land-use in the Northern Ghana. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 32–42. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Treatments | Treatment Details | Tillage and Straw Management |
|---|---|---|
| FSC | Full straw coverage | During harvesting in autumn, straw was pulverized (≤20 cm) and evenly spread. About a week before sowing, a straw-turning machine organized strip-like patterns (70–80 cm and 50–60 cm wide without straw). Seeding employed a no-till seeder in a wide–narrow row pattern, sowing seeds in the cleared 50–60 cm strip (40 cm seedbed width), and simultaneously applying base fertilizer. |
| CT | Conventional tillage | Mechanically harvested straw (≤20 cm) was baled and removed from the field pre-freezing. Approximately 20 days before sowing, a combined land leveling tool was used for stubble removal, rotary tillage, ridge formation, and fertilization. Compaction measures were applied for optimal sowing conditions. A precision seeder was then used for planting, followed by additional consolidation. |
| RT | Rotational tillage | In a corn–soybean rotation, straw was mechanically crushed during harvest. In autumn, a fence-type plow buried straw for incorporation, followed by harrowing for leveling. In spring, a secondary harrowing, contingent on surface conditions when soil thawed at 10 cm, achieved optimal sowing conditions. |
| CPT | Continuous plowing tillage | Mechanical harvest crushed and further pulverized straw. Pre-freezing, a fence-type five-share plow deeply tilled the field to 30–35 cm, followed by re-harrowing. The operation of spring sowing was the same as RT. |
| Soil Nutrients | Score (F) | Extremely High | High | Medium | Low | Extremely Low |
|---|---|---|---|---|---|---|
| SOM | g/kg | ≥25 | 25–20 | 20–15 | 15–10 | <10 |
| value | 100 | 80 | 60 | 40 | 20 | |
| TN | g/kg | ≥1.20 | 1.20–1.00 | 1.00–0.80 | 0.80–0.65 | <0.65 |
| value | 100 | 80 | 60 | 40 | 20 | |
| AP | mg/kg | ≥90 | 90–60 | 60–30 | 30–15 | <15 |
| value | 100 | 80 | 60 | 40 | 20 | |
| AK | mg/kg | ≥155 | 155–125 | 125–100 | 100–70 | <70 |
| value | 100 | 80 | 60 | 40 | 20 |
| Sensor No. | Sensor Type | Main Applications | Typical Detection Ranges (ppm) |
|---|---|---|---|
| S1 | MQ-2 | combustible gases, fumes | 300–10,000 |
| S2 | MQ136 | hydrogen sulfide (H2S) | 1–200 |
| S3 | MQ131 | ozone (O3) | 10–1000 |
| S4 | MQ137 | ammonia (NH3) | 5–500 |
| S5 | MQ138 | toluene, acetone, ethanol, hydrogen | 5–500 |
| S6 | MQ-8 | hydrogen (H2) | 100–1000 |
| S7 | MQ-3B1 | alcohol vapor | 25–500 |
| S8 | MQ-4 | methane (CH4) | 300–10,000 |
| S9 | MQ-5 | liquefied gas, methane, propane | 300–10,000 |
| S10 | MQ-3B2 | alcohol vapor | 25–500 |
| Soil Treatments | Number of Test Samples | Predicted | Classification Accuracy (%) | |||
|---|---|---|---|---|---|---|
| FSC | CT | RT | CPT | |||
| FSC | 110 | 108 | 0 | 2 | 0 | 98.18 |
| CT | 120 | 0 | 118 | 2 | 0 | 98.33 |
| RT | 110 | 3 | 0 | 107 | 0 | 97.27 |
| CPT | 110 | 0 | 0 | 0 | 110 | 100.00 |
| Soil Treatments | Number of Test Samples | Predicted | Classification Accuracy (%) | |||
|---|---|---|---|---|---|---|
| FSC | CT | RT | CPT | |||
| FSC | 110 | 107 | 0 | 2 | 1 | 97.27 |
| CT | 120 | 0 | 119 | 1 | 0 | 99.17 |
| RT | 110 | 2 | 0 | 108 | 0 | 98.18 |
| CPT | 110 | 0 | 0 | 0 | 110 | 100.00 |
| Soil Treatments | Number of Test Samples | Predicted | Classification Accuracy (%) | |||
|---|---|---|---|---|---|---|
| FSC | CT | RT | CPT | |||
| FSC | 110 | 110 | 0 | 0 | 0 | 100.00 |
| CT | 120 | 0 | 120 | 0 | 0 | 100.00 |
| RT | 110 | 0 | 0 | 110 | 0 | 100.00 |
| CPT | 110 | 0 | 0 | 0 | 110 | 100.00 |
| Soil Fertility Grades | Number of Test Samples | Predicted | Classification Accuracy (%) | ||
|---|---|---|---|---|---|
| Low | Medium | High | |||
| Low | 130 | 130 | 0 | 0 | 100.00 |
| Medium | 150 | 0 | 149 | 1 | 99.33 |
| High | 160 | 0 | 1 | 159 | 99.38 |
| Soil Fertility Grades | Number of Test Samples | Predicted | Classification Accuracy (%) | ||
|---|---|---|---|---|---|
| Low | Medium | High | |||
| Low | 130 | 130 | 0 | 0 | 100.00 |
| Medium | 150 | 0 | 149 | 1 | 99.33 |
| High | 160 | 0 | 0 | 160 | 100.00 |
| Soil Fertility Grades | Number of Test Samples | Predicted | Classification Accuracy (%) | ||
|---|---|---|---|---|---|
| Low | Medium | High | |||
| Low | 130 | 130 | 0 | 0 | 100.00 |
| Medium | 150 | 0 | 150 | 0 | 100.00 |
| High | 160 | 0 | 0 | 160 | 100.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Chen, X.; Huang, D.; Wang, J.; Jiang, X.; Meng, X.; Gao, X. The Discrete Taxonomic Classification of Soils Subjected to Diverse Treatment Modalities and Varied Fertility Grades Utilizing Machine Olfaction. Agriculture 2024, 14, 291. https://doi.org/10.3390/agriculture14020291
Liu S, Chen X, Huang D, Wang J, Jiang X, Meng X, Gao X. The Discrete Taxonomic Classification of Soils Subjected to Diverse Treatment Modalities and Varied Fertility Grades Utilizing Machine Olfaction. Agriculture. 2024; 14(2):291. https://doi.org/10.3390/agriculture14020291
Chicago/Turabian StyleLiu, Shuyan, Xuegeng Chen, Dongyan Huang, Jingli Wang, Xinming Jiang, Xianzhang Meng, and Xiaomei Gao. 2024. "The Discrete Taxonomic Classification of Soils Subjected to Diverse Treatment Modalities and Varied Fertility Grades Utilizing Machine Olfaction" Agriculture 14, no. 2: 291. https://doi.org/10.3390/agriculture14020291
APA StyleLiu, S., Chen, X., Huang, D., Wang, J., Jiang, X., Meng, X., & Gao, X. (2024). The Discrete Taxonomic Classification of Soils Subjected to Diverse Treatment Modalities and Varied Fertility Grades Utilizing Machine Olfaction. Agriculture, 14(2), 291. https://doi.org/10.3390/agriculture14020291