
Evaluating the Performance of a Novel Digital Slippage System for Tractor Wheels Across Varied Tillage Methods and Soil Textures



Abstract
1. Introduction
2. Materials and Methods
2.1. Novel Digital Slippage System (NDSS) Implementation
2.1.1. Hardware
2.1.2. Software
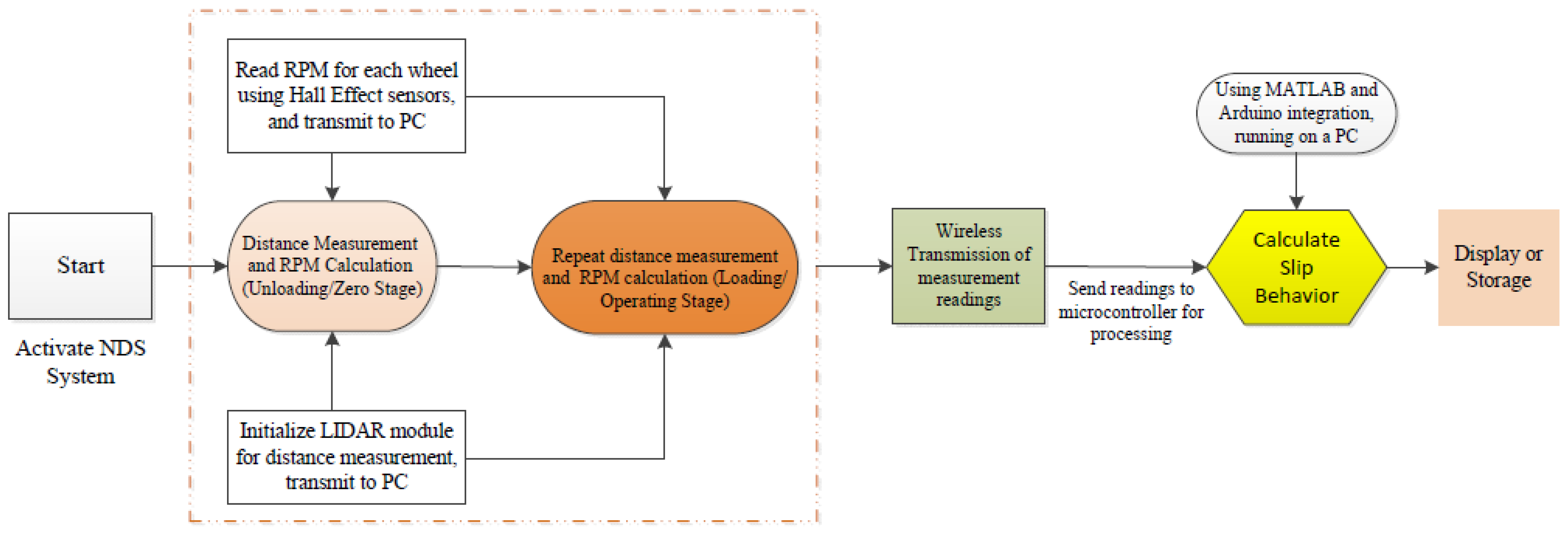
2.2. Procedure of the Theoretical and Experimental Work of the NDSS
- Distance measurement and revolutions per minute (RPM) calculation in the unloading or specified zero conditions stage:
- -
- Upon activating the NDSS, a microcontroller instructs the LIDAR module to initiate distance measurement for the tractor. The LIDAR module sensor measures the time from the activation of the Trig/Tx pin, which generates ultrasonic waves, until a high voltage is detected on the Echo/Rx pin, indicating the arrival of the wave after bouncing off an obstacle or object in front of the sensor.
- -
- By knowing the wave’s propagation velocity and the measured time, the distance can be calculated using the following equation:
- -
- Simultaneously, the system calculates the RPM for each wheel of the tractor using four hall effect (HE) sensors installed near the wheels. These sensors provide information about the number of RPMs for each wheel. The RPM results can be transmitted to a PC using the Arduino program connected to a receiver module and then saved.
- Distance measurements and RPM calculation under loading and operating conditions at the same specified area:
- -
- The measured signals from the LIDAR module sensor and the four HE sensors (corresponding to the four wheels of the tractor) are read again when the tractor is loaded with agricultural equipment and operated under different conditions.
- -
- These readings are then sent to the microcontroller for processing.
- Wireless transmission of the results: The results obtained from steps 1 and 2 are wirelessly transmitted to a PC using a 315 MHz RF transmitter and receiver module.
- Calculation of slip behavior:
- -
- The slip behavior of the tractor wheels is calculated by connecting the Arduino board with MATLAB using the MATLAB Support Package for Arduino. It performs the necessary calculations to determine the SR. This involves mathematical operations, data analysis, and applying the slip percentage equation.
- -
- The slip percentage is calculated using the following equation:
- Display or storage: MATLAB can display the calculated slip behavior on the PC’s screen, providing real-time feedback. Additionally, MATLAB can save the results for further analysis or archival purposes.
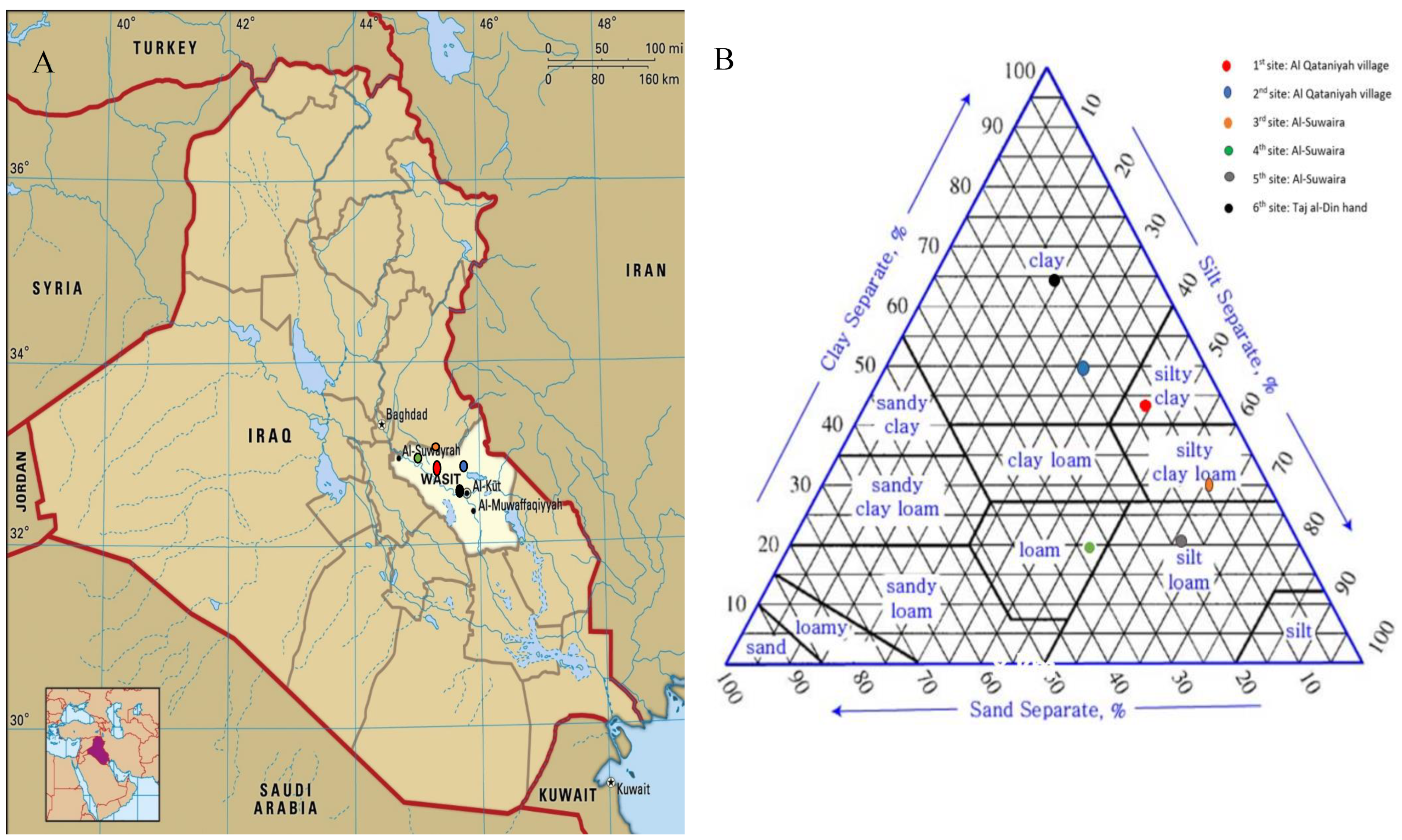
2.3. Experiment Sites
2.4. Experimental Setup
2.5. Qualitative Assessments of NDSS Accuracy in Measuring SR
2.6. Data Analysis
3. Results and Discussion
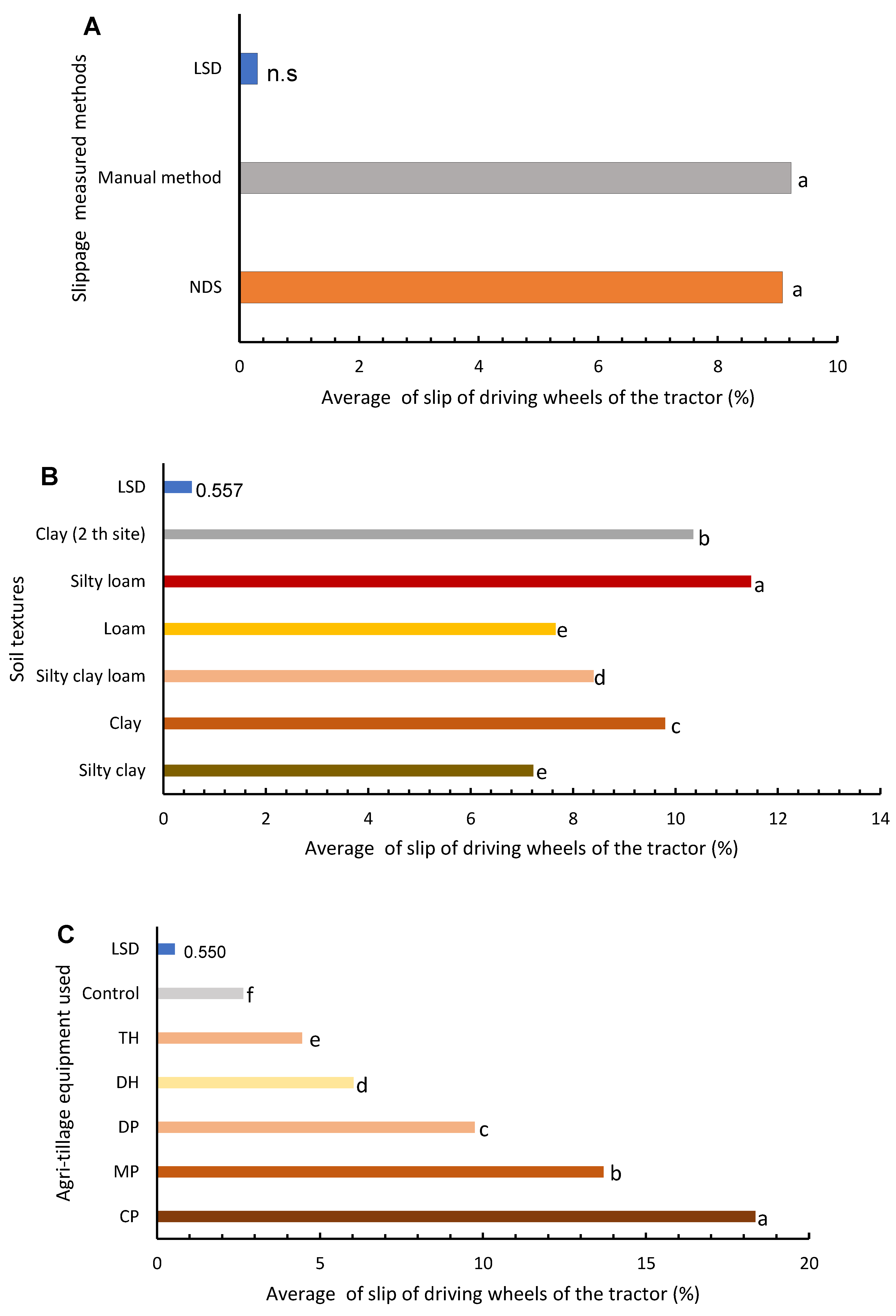
3.1. Analyzing Tractor Rear Slip Behaviors
3.2. Statistical Analysis of Tractor Rear Wheel Slip Rate
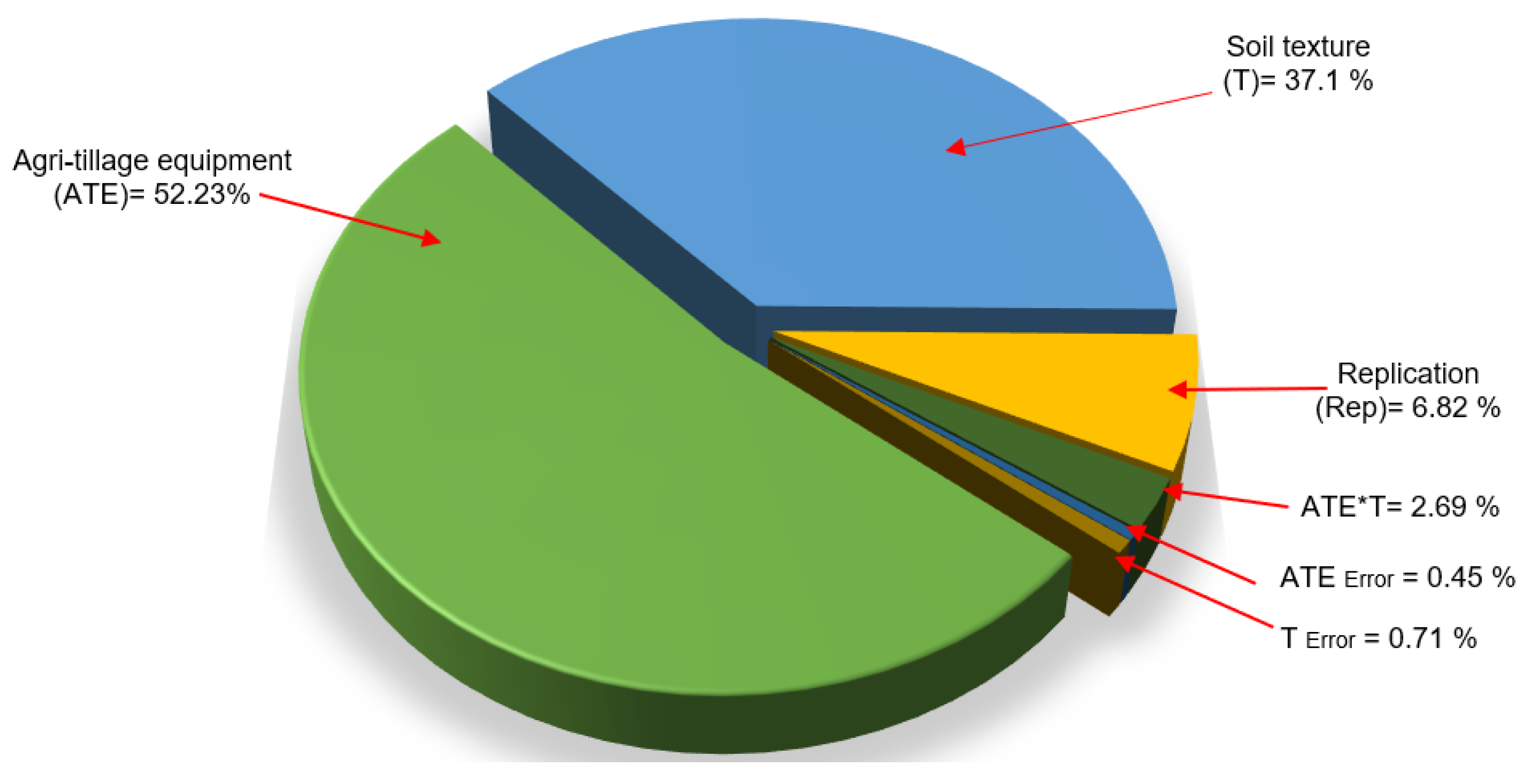
3.3. ANOVA for Tractor Rear Wheel SR
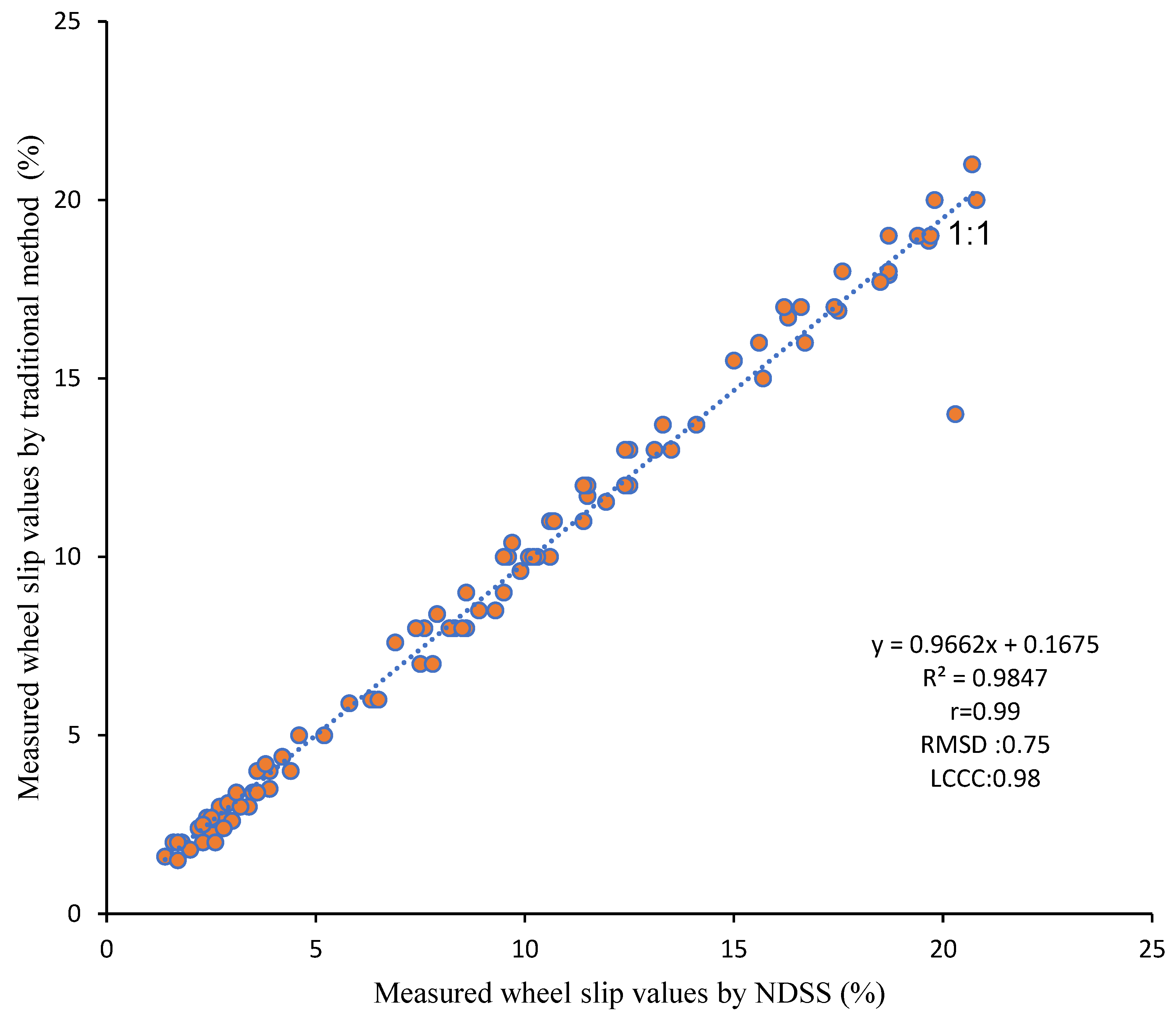
3.4. Evaluating NDSS Performance in SR Measurements
3.5. Assessing the Cost of Implementing the NDSS
3.6. Limitations of the NDSS and Future Research
- Applicability to specific context: This study focused on assessing SR in rear-wheel-drive tractors used in Iraq. To extend the findings to other regions or diverse agricultural scenarios, additional empirical research is necessary. The applicability of the NDSS in varied contexts needs thorough exploration. For example, using machine learning algorithms to improve data analysis and predictive capabilities.
- Scaling challenges: While the NDSS demonstrated accurate measurements, its application on a larger scale may face several challenges. Factors such as machinery speed, soil friction coefficients, tillage depths, equipment cost, availability, and levels of technical expertise could pose barriers to widespread adoption and long-term evaluations. Future research should address these challenges for broader implementation, leading to design refinements based on the NDSS.
- Comprehensive variable consideration: The study predominantly investigated the impact of Ts and A-TE on SR. However, other variables such as weather conditions, terrain characteristics, and operator expertise were not systematically explored. Future research endeavours should aim to include a more comprehensive range of variables for a holistic understanding of the SR dynamics.
- Validation against established procedures: While the NDSS demonstrated similar results to traditional methods, future research should validate it against other established procedures to enhance its resilience and reliability. Comparisons with diverse measurement techniques will strengthen the NDSS’s credibility and provide a more comprehensive assessment of its performance.
4. Conclusions
- Consistency in SR measurement methods: The methods utilized to quantify SR demonstrated remarkable consistency across diverse field conditions, showcasing the robustness of both the NDSS and CM.
- Influence of Ts and A-TE: Both Ts and A-TE exerted significant effects on SR, emphasizing the importance of these factors in assessing tractor performance.
- Outstanding statistical performance of the NDSS: The NDSS showcased exceptional statistical performance (R2 = 0.98; RMSD: 0.75%; LCCC: 0.96%) across all soil treatments, closely aligning with values anticipated by CM.
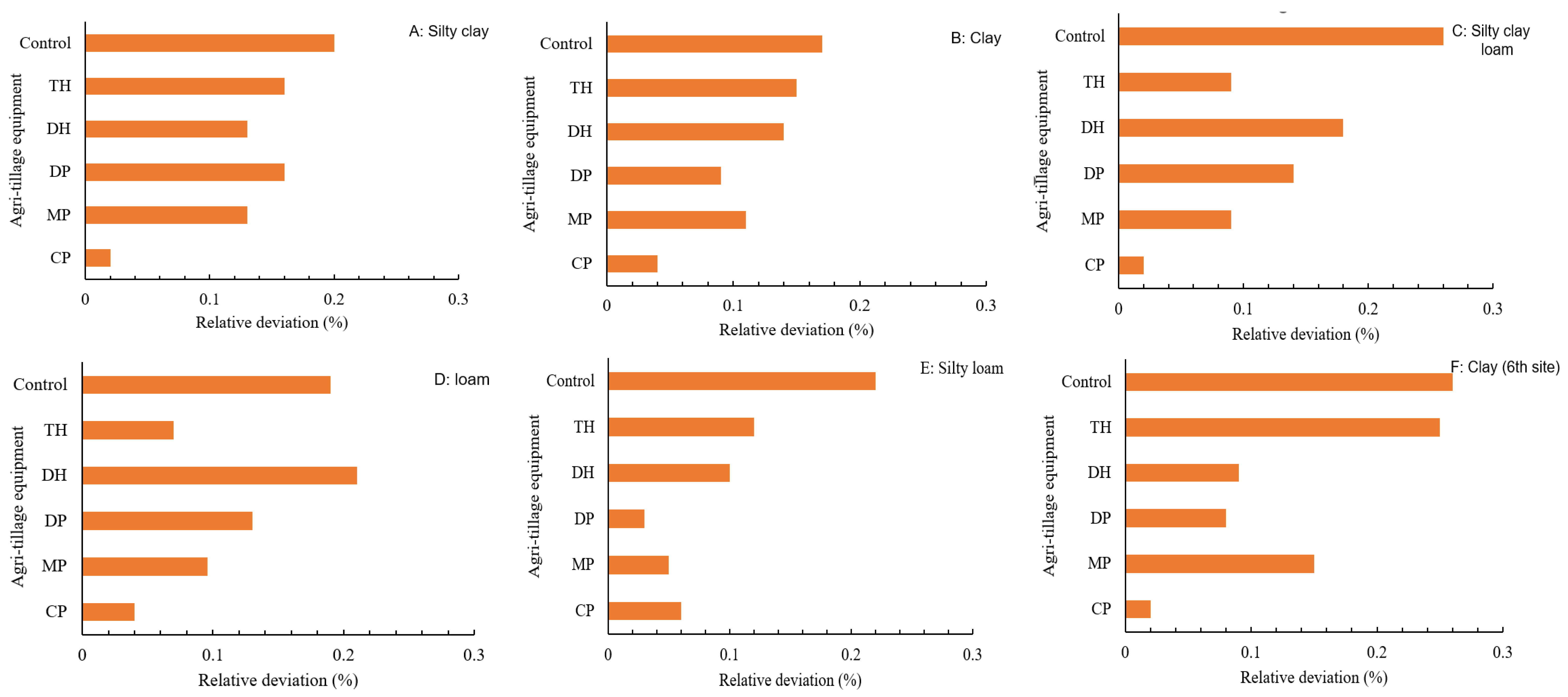
- Enhanced accuracy of NDSS: The NDSS demonstrated heightened accuracy in SR measurements compared to the CM, evidenced by reduced MPE and SDPE values across Ts and A-TE.
- Impact of soil tillage depths and characteristics: Soil tillage depths, µ, and electromagnetic conductivity emerged as significant factors influencing SR, as assessed by the NDSS.
- Reliability of NDSS: The NDSS proved to be a reliable instrument for assessing SR in rear tractor wheels, offering high precision and substantial agreement with CM. The findings underscore the necessity of considering soil conditions and ploughing methods when interpreting SR measurements obtained through the NDSS.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Goering, C.E. Century of tractor development: 1907–2007. Trans. ASABE 2008, 51, 379–383. [Google Scholar] [CrossRef]
- Jongerden, J.; Wolters, W.; Dijkxhoorn, Y.; Gür, F.; Öztürk, M. The politics of agricultural development in Iraq and the Kurdistan Region in Iraq (KRI). Sustainability 2019, 11, 5874. [Google Scholar] [CrossRef]
- Wen, C.-K.; Ren, W.; Zhu, Q.-Z.; Zhao, C.-J.; Luo, Z.-H.; Zhang, S.-L.; Xie, B.; Meng, Z.-J. Reducing operation emissions and improving work efficiency using a pure electric wheel drive tractor. Engineering 2024, 37, 230–245. [Google Scholar] [CrossRef]
- Li, X.; Xu, L.; Liu, M.; Yan, X.; Zhang, M. Research on torque cooperative control of distributed drive system for fuel cell electric tractor. Comput. Electron. Agric. 2024, 219, 108811. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Lee, S.-D.; Baek, S.-M.; Baek, S.-Y.; Jeon, H.-H.; Lee, J.-H.; Abu Ayub Siddique, M.; Kim, Y.-J.; Kim, W.-S.; Sim, T.; et al. Development of DEM-MBD coupling model for draft force prediction of agricultural tractor with plowing depth. Comput. Electron. Agric. 2022, 202, 107405. [Google Scholar] [CrossRef]
- Al-Shammary, A.A.G.; Al-Shihmani, L.S.S.; Fernández-Gálvez, J.; Caballero-Calvo, A. Optimizing sustainable agriculture: A comprehensive review of agronomic practices and their impacts on soil attributes. J. Environ. Manag. 2024, 364, 121487. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Gilandeh, Y.A.; Gundoshmian, T.M. The effect of the tractor driving system on its performance and fuel consumption. Energy 2020, 202, 117803. [Google Scholar] [CrossRef]
- Janulevičius, A.; Damanauskas, V.; Pupinis, G. Effect of variations in front wheels driving lead on performance of a farm tractor with mechanical front-wheel-drive. J. Terramech. 2018, 77, 23–30. [Google Scholar] [CrossRef]
- Singh, A.; Nawayseh, N.; Singh, H.; Dhabi, Y.K.; Samuel, S. Internet of agriculture: Analyzing and predicting tractor ride comfort through supervised machine learning. Eng. Appl. Artif. Intell. 2023, 125, 106720. [Google Scholar] [CrossRef]
- Janulevičius, A.; Damanauskas, V. Prediction of tractor drive tire slippage under different inflation pressures. J. Terramech. 2022, 101, 23–31. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Gilandeh, Y.A.; Kaveh, M.; Szymanek, M. Investigating the effect of the tractor driving system type on soil compaction using different methods of ANN, ANFIS and step wise regression. Soil Tillage Res. 2022, 222, 105444. [Google Scholar] [CrossRef]
- Siddique, M.A.A.; Baek, S.-M.; Baek, S.-Y.; Jeon, H.-H.; Kim, Y.-J.; Kim, Y.-S.; Kim, W.-S.; Lee, D.-H.; Lim, R.-G.; Kim, T.-J. Application of auto power shift (APS) controller for minimizing fuel consumption and performance evaluation of an agricultural tractor. Comput. Electron. Agric. 2023, 214, 108279. [Google Scholar] [CrossRef]
- Obalalu, A.M.; Alqarni, M.M.; Odetunde, C.; Memon, M.A.; Olayemi, O.A.; Shobo, A.B.; Mahmoud, E.E.; Ali, M.R.; Sadat, R.; Hendy, A.S. Improving agricultural efficiency with solar-powered tractors and magnetohydrodynamic entropy generation in copper–silver nanofluid flow. Case Stud. Therm. Eng. 2023, 51, 103603. [Google Scholar] [CrossRef]
- Askari, M.; Abbaspour-Gilandeh, Y.; Taghinezhad, E.; Hegazy, R.; Okasha, M. Prediction and optimizing the multiple responses of the overall energy efficiency (OEE) of a tractor-implement system using response surface methodology. J. Terramech. 2022, 103, 11–17. [Google Scholar] [CrossRef]
- Battiato, A.; Diserens, E. Influence of Soil on the Traction Performance of a 65 kW MFWD Tractor. J. Agric. Sci. 2019, 11, 11. [Google Scholar] [CrossRef]
- Čiplienė, A.; Gurevičius, P.; Janulevičius, A.; Damanauskas, V. Experimental validation of tyre inflation pressure model to reduce fuel consumption during soil tillage. Biosyst. Eng. 2019, 186, 45–59. [Google Scholar] [CrossRef]
- Soylu, S.; Çarman, K. Fuzzy logic based automatic slip control system for agricultural tractors. J. Terramech. 2021, 95, 25–32. [Google Scholar] [CrossRef]
- Damanauskas, V.; Janulevičius, A. Differences in tractor performance parameters between single-wheel 4WD and dual-wheel 2WD driving systems. J. Terramech. 2015, 60, 63–73. [Google Scholar] [CrossRef]
- Nataraj, E.; Sarkar, P.; Raheman, H.; Upadhyay, G. Embedded digital display and warning system of velocity ratio and wheel slip for tractor operated active tillage implements. J. Terramech. 2021, 97, 35–43. [Google Scholar] [CrossRef]
- ASAE Standard S296.2; Uniform Terminology for Traction of Agricultural Tractors. Self-Propelled Implements, and Other Traction and Transport Devices. ASAE Standard: St Joseph, MI, USA, 1983.
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Fundamental realization of longitudinal slip efficiency of tractor wheels in a tillage practice. Soil Tillage Res. 2021, 205, 104765. [Google Scholar] [CrossRef]
- Zhang, S.-l.; Wen, C.-k.; Ren, W.; Luo, Z.-h.; Xie, B.; Zhu, Z.-x.; Chen, Z.-j. A joint control method considering travel speed and slip for reducing energy consumption of rear wheel independent drive electric tractor in ploughing. Energy 2023, 263, 126008. [Google Scholar] [CrossRef]
- Gupta, C.; Tewari, V.K.; Ashok Kumar, A.; Shrivastava, P. Automatic tractor slip-draft embedded control system. Comput. Electron. Agric. 2019, 165, 104947. [Google Scholar] [CrossRef]
- Zhang, S.; Ren, W.; Xie, B.; Luo, Z.; Wen, C.; Chen, Z.; Zhu, Z.; Li, T. A combined control method of traction and ballast for an electric tractor in ploughing based on load transfer. Comput. Electron. Agric. 2023, 207, 107750. [Google Scholar] [CrossRef]
- Pranav, P.K.; Tewari, V.K.; Pandey, K.P.; Jha, K.R. Automatic wheel slip control system in field operations for 2WD tractors. Comput. Electron. Agric. 2012, 84, 1–6. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, Z.; Chen, J.; Li, Z.; Zhu, Z.; Song, Z.; Mao, E. Control method of driving wheel slip rate of high-power tractor for ploughing operation. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2020, 36, 47–55. [Google Scholar] [CrossRef]
- ASAE ANSI/ASAE S296.5; General Terminology for Traction of Agricultural Traction and Transport Devices and Vehicles. ASAE: St. Joseph, MI, USA, 2003.
- Lockeretz, W. Energy implications of conservation tillage. J. Soil Water Conserv. 1983, 38, 207–211. [Google Scholar]
- Wen, C.-K.; Wang, H.-W.; Luo, C.-H.; Fu, W.-Q.; Zhu, Q.-Z.; Yin, Y.-X.; Meng, Z.-J. Development and testing of a ground recognition system for tractor field operations. Comput. Electron. Agric. 2023, 213, 108190. [Google Scholar] [CrossRef]
- Wen, C.; Xie, B.; Song, Z.; Yang, Z.; Dong, N.; Han, J.; Yang, Q.; Liu, J. Methodology for designing tractor accelerated structure tests for an indoor drum-type test bench. Biosyst. Eng. 2021, 205, 1–26. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, L.; Zhu, Z.; Mao, E.; Chen, Y.; Liu, Y.; Du, X. Measuring method of slip ratio for tractor driving wheels based on machine vision. Agriculture 2022, 12, 292. [Google Scholar] [CrossRef]
- Qiu, Z.; Shi, G.; Zhao, B.; Jin, X.; Zhou, L. Combine harvester remote monitoring system based on multi-source information fusion. Comput. Electron. Agric. 2022, 194, 106771. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Xia, J.; Zhang, C.; Zhou, H.; Zhu, Y. Rigid lugged wheel for conventional agricultural wheeled tractors—Optimising traction performance and wheel–soil interaction in field operations. Biosyst. Eng. 2019, 188, 14–23. [Google Scholar] [CrossRef]
- Singh, T.; Verma, A.; Singh, M. Development and implementation of an IOT based instrumentation system for computing performance of a tractor-implement system. J. Terramech. 2021, 97, 105–118. [Google Scholar] [CrossRef]
- Ekinci, Ş.; Çarman, K. Effects of some properties of drive tires used in horticultural tractors on tractive performance. J. Agric. Sci. 2017, 23, 84–94. [Google Scholar]
- Bulgakov, V.; Aboltins, A.; Beloev, H.; Nadykto, V.; Kyurchev, V.; Adamchuk, V.; Kaminskiy, V. Maximum admissible slip of tractor wheels without disturbing the soil structure. Appl. Sci. 2021, 11, 6893. [Google Scholar] [CrossRef]
- Shafaei, S.; Loghavi, M.; Kamgar, S. On the reliability of intelligent fuzzy system for multivariate pattern scrutinization of power consumption efficiency of mechanical front wheel drive tractor. J. Biosyst. Eng. 2021, 46, 1–15. [Google Scholar] [CrossRef]
- Han, J.; Yan, X.; Tang, H. Method of controlling tillage depth for agricultural tractors considering engine load characteristics. Biosyst. Eng. 2023, 227, 95–106. [Google Scholar] [CrossRef]
- Kostić, M.; Rajković, M.; Ljubičić, N.; Ivošević, B.; Radulović, M.; Blagojević, D.; Dedović, N. Georeferenced tractor wheel slip data for prediction of spatial variability in soil physical properties. Precis. Agric. 2021, 22, 1659–1684. [Google Scholar] [CrossRef]
- Kim, W.-S.; Kim, Y.-J.; Park, S.-U.; Kim, Y.-S. Influence of soil moisture content on the traction performance of a 78-kW agricultural tractor during plow tillage. Soil Tillage Res. 2021, 207, 104851. [Google Scholar] [CrossRef]
- Raghavan, G.; McKyes, E.; Chassé, M. Effect of wheel slip on soil compaction. J. Agric. Eng. Res. 1977, 22, 79–83. [Google Scholar] [CrossRef]
- Bauer, F.; Porteš, P.; Polcar, A.; Čupera, J.; Fajman, M. Differences in the wheel loads and contact pressure of the in-furrow and on-land rear tractor tyres with mounted and semi-mounted ploughs. Soil Tillage Res. 2022, 215, 105190. [Google Scholar] [CrossRef]
- Sunusi, I.I.; Zhou, J.; Wang, Z.Z.; Sun, C.; Ibrahim, I.E.; Opiyo, S.; Soomro, S.A.; Sale, N.A.; Olanrewaju, T. Intelligent tractors: Review of online traction control process. Comput. Electron. Agric. 2020, 170, 105176. [Google Scholar] [CrossRef]
- Kumar, R.; Raheman, H. Design and development of a variable hitching system for improving stability of tractor trailer combination. Eng. Agric. Environ. Food 2015, 8, 187–194. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Benchmark of an intelligent fuzzy calculator for admissible estimation of drawbar pull supplied by mechanical front wheel drive tractor. Artif. Intell. Agric. 2020, 4, 209–218. [Google Scholar] [CrossRef]
- Almaliki, S.A.; Himoud, M.S.; Muhsin, S.J. Mathematical model for evaluating slippage of tractor under various field conditions. Basrah J. Agric. Sci. 2021, 34, 49–59. [Google Scholar] [CrossRef]
- Kaky, E.; Nolan, V.; Khalil, M.I.; Ameen Mohammed, A.M.; Ahmed Jaf, A.A.; Mohammed-Amin, S.M.; Mahmood, Y.A.; Gilbert, F. Conservation of the Goitered gazelle (Gazella subgutturosa) under climate changes in Iraq. Heliyon 2023, 9, e12501. [Google Scholar] [CrossRef]
- Staff, S.S. Keys to Soil Taxonomy; United States Department of Agriculture: Washington, DC, USA, 2014. [Google Scholar]
- Alshammary, A.A.G.; Kouzani, A.Z.; Kaynak, A.; Khoo, S.Y.; Norton, M.; Gates, W.P.; AL-Maliki, M.; Rodrigo-Comino, J. The performance of the DES sensor for estimating soil bulk density under the effect of different agronomic practices. Geosciences 2020, 10, 117. [Google Scholar] [CrossRef]
- Nakhli, S.A.A.; Panta, S.; Brown, J.D.; Tian, J.; Imhoff, P.T. Quantifying biochar content in a field soil with varying organic matter content using a two-temperature loss on ignition method. Sci. Total Environ. 2019, 658, 1106–1116. [Google Scholar] [CrossRef]
- Al-Shammary, A.A.G.; Al-Shihmani, L.S.S.; Caballero-Calvo, A.; Fernández-Gálvez, J. Impact of agronomic practices on physical surface crusts and some soil technical attributes of two winter wheat fields in southern Iraq. J. Soils Sediments 2023, 23, 3917–3936. [Google Scholar] [CrossRef]
- Kumar, A.; Pandey, K.P. A device to measure dynamic front wheel reaction to safeguard rearward overturning of agricultural tractors. Comput. Electron. Agric. 2012, 87, 152–158. [Google Scholar] [CrossRef]
- Al-Shammary, A.A.G.; Kouzani, A.; Saeed, T.R.; Rodrigo-Comino, J. A new digital electromechanical system for measurement of soil bulk density. Comput. Electron. Agric. 2019, 156, 227–242. [Google Scholar] [CrossRef]
- SAS, I. Base SAS 9.4 Procedures Guide: Statistical Procedures; SAS Institute Inc.: Cary, NC, USA, 2013. [Google Scholar]
- Davies, D.; Finney, J.; Richardson, S. Relative effects of tractor weight and wheel-slip in causing soil compaction. J. Soil Sci. 1973, 24, 399–409. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, X.; Wang, W.; Song, Y.; Cui, Y. Joint control method based on speed and slip rate switching in plowing operation of wheeled electric tractor equipped with sliding battery pack. Comput. Electron. Agric. 2023, 215, 108426. [Google Scholar] [CrossRef]
- Oduma, O.; Ugwu, E.C.; Ehiomogue, P.; Igwe, J.E.; Ntunde, D.I.; Agu, C.S. Modelling of the effects of working width, tillage depth and operational speed on draft and power requirements of disc plough in sandy-clay soil in South-East Nigeria. Sci. Afr. 2023, 21, e01815. [Google Scholar] [CrossRef]
- Dong, X.; Jin, J.; Jia, Z.; Qi, Y.; Chen, T.; He, L.; Zou, M. Design and passability study of soil-plowing wheel facing soft terrain. J. Terramech. 2025, 117, 101002. [Google Scholar] [CrossRef]
- Upadhyay, G.; Raheman, H. Comparative assessment of energy requirement and tillage effectiveness of combined (active-passive) and conventional offset disc harrows. Biosyst. Eng. 2020, 198, 266–279. [Google Scholar] [CrossRef]
- Ahmadi, I. A power estimator for an integrated active-passive tillage machine using the laws of classical mechanics. Soil Tillage Res. 2017, 171, 1–8. [Google Scholar] [CrossRef]
- Behera, A.; Raheman, H.; Thomas, E.V. A comparative study on tillage performance of rota-cultivator (a passive—Active combination tillage implement) with rotavator (an active tillage implement). Soil Tillage Res. 2021, 207, 104861. [Google Scholar] [CrossRef]
- Fawzi, H.; Mostafa, S.A.; Ahmed, D.; Alduais, N.; Mohammed, M.A.; Elhoseny, M. TOQO: A new Tillage Operations Quality Optimization model based on parallel and dynamic Decision Support System. J. Clean. Prod. 2021, 316, 128263. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Feasibility of implementation of intelligent simulation configurations based on data mining methodologies for prediction of tractor wheel slip. Inf. Process. Agric. 2019, 6, 183–199. [Google Scholar] [CrossRef]
- Zhu, D.; Shi, M.; Yu, C.; Yu, Z.; Kuang, F.; Xiong, W.; Xue, K. Tool-straw-paddy soil coupling model of mechanical rotary-tillage process based on DEM-FEM. Comput. Electron. Agric. 2023, 215, 108410. [Google Scholar] [CrossRef]
- Upadhyay, G.; Raheman, H. Comparative analysis of tillage in sandy clay loam soil by free rolling and powered disc harrow. Eng. Agric. Environ. Food 2019, 12, 118–125. [Google Scholar] [CrossRef]
- Esmaeilian, Y.; Babaeian, M.; Caballero-Calvo, A. Optimization of castor bean (Ricinus communis L.) cultivation methods using biostimulants in an arid climate. Euro-Mediterr. J. Environ. Integr. 2023, 8, 823–834. [Google Scholar] [CrossRef]
- Mamkagh, A.M. Effect of soil moisture, tillage speed, depth, ballast weight and, used implement on wheel slippage of the tractor: A review. Asian J. Adv. Agric. Res. 2019, 9, 1–7. [Google Scholar] [CrossRef]
- Al-Shammary AA, G.; Lahmod, N.R.; Fernández-Gálvez, J.; Caballero-Calvo, A. Effect of tillage systems combined with plastic film mulches and fertilizers on soil physical properties in a wheat-agricultural site in southern Iraq. Cuad. Investig. Geográfica 2023, 49, 51–63. [Google Scholar] [CrossRef]
- Al-Shammary, A.A.G.; Caballero-Calvo, A.; Jebur, H.A.; Khalbas, M.I.; Fernández-Gálvez, J. A novel heat-pulse probe for measuring soil thermal conductivity: Field test under different tillage practices. Comput. Electron. Agric. 2022, 202, 107414. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Treatments ID | Number of Observations Read | Coordinates/Treatment/Descriptions | Soil Depths 0–25 cm | Land Used | Date of Test | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Main factor Six Agri-fields ID/soil texture (Ts) | ρb g cm−3 | µ % | SOM % | pH | ES ds m−1 | |||||
| Al Qataniyah village | Silty clay | 36 | 32.916431 N, 44.944235 E | 1.40 | 13.0 | 6.0 | 7.00 | 1.70 | wheat (Triticum aestivum L.) | 3–5 September 2021 |
| Clay | 36 | 32.938117 N, 44.979167 E | 1.55 | 23.0 | 5.0 | 7.36 | 11.22 | wheat (Triticum aestivum L.) | 8–9 September 2021 | |
| Al-Suwaira | Silty clay loam | 36 | 32.989947 N, 44.794185 E | 1.45 | 17.5 | 5.8 | 7.70 | 3.81 | Maize (Zea mays) and wheat | 23–25 September 2021 |
| Loam | 36 | 32.949358 N, 44.739880 E | 1.39 | 26.0 | 7.4 | 7.14 | 1.47 | Cultivating winter cover crops | 29–30 September 2021 | |
| Silty loam | 36 | 32.953473 N, 44.798662 E | 1.47 | 15.0 | 6.6 | 7.73 | 3.58 | Wheat | 21–24 October 2021 | |
| Taj al-Din hand | Clay | 36 | 32.924266 N, 44.848932 E | 1.51 | 21.0 | Rotation cropping system of maize and barley (Hordeum vulgare) | 11–14 November 2021 | |||
| Split plot Tillage system/Agri-tillage equipment (A-TE) | ||||||||||
| Conservational tillage (CT) | Chisel plough (CP) | 36 | CP is commonly used in CT systems, where farmers aim to minimize soil erosion, enhance soil health, and reduce fuel usage. It is equipped with 11 blades, has a working width of 2.16 m, a working depth of 0.30 m, and a weight of 300 kg. It is manufactured in Iraq. |  | ||||||
| Conventional tillage (TT) | Moldboard plough (MP) | 36 | MP have been extensively utilized in the TT system. The length of the MP is 2.18 m. It has three moldboards and a width of 1.19 m. The tillage depth is 0.27 m and the height is 0.11 m. The MP was created in Iraq. |  | ||||||
| Disc plough (DP) | 36 | The DP is commonly used in both MT and TT systems. It consists of four discs. The disc diameter is 660 mm. The working width may be adjusted to 90 cm, 110 cm, or 130 cm. The working depth is 26 cm. The weight of the equipment is 425 kg produced in Turkey. |  | |||||||
| Minimum tillage (MT) | Disc harrowing (DH) | 36 | The DH (Maschio type), 1.85 m operating width, 365 kg weight, 45 ° rear cover opening angle, hanging type. Smooth-edged DH (type 170, manufactured by the State Company for Mechanical Industries (SCMI) in Iraq. |  | ||||||
| Spring-tooth harrowing (TH) | 36 | The TH is commonly used in various agricultural tillage systems, including TT, MT, and organic farming. It weighs 295 kg, with a working width of 2.69 m, a working depth of 0.20 m, and 11 teeth. It is produced at SCMI, Iraq. |  | |||||||
| Control treatment (no loading) | 36 | Whereby the tractor drives twice (back and forth) through the experimental unit assigned to each research location without loading. | ||||||||
| Split-split plot Method measured the SR | ||||||||||
| Novel digital slippage system (NDSS) | 108 | Both the traditional approach and the NDSS method may be used to measure the SR of a tractor’s wheel. Section 2.1 and Section 2.2 examine the NDSS. The determination of SR by CM is indirectly accomplished by computing the number of rotations of the driving wheels and the distance travelled under both loaded and empty situations, as indicated in equations 1 and 2. It has been established at a standardized plot length of 75 m for all experimental configurations, which was uniformly maintained throughout all experiments. This standardization facilitates the consistent use of the formulae and guarantees the comparability of the SR measurements [27]. | ||||||||
| Traditional method(CM) | 108 | |||||||||
| Experimental Fields ID | Measured for Tractor Rear Wheel Slip | CV | SEM | Minimum | Maximum | Mean |
|---|---|---|---|---|---|---|
| % | % | % | % | |||
| Silty clay | NDSS | 80.9 | 1.30 | 0 | 16.56 | 7.25 |
| CM | 79.4 | 1.26 | 0 | 16.16 | 7.19 | |
| Clay | NDSS | 62.5 | 1.32 | 0 | 18.92 | 9.53 |
| CM | 66.5 | 1.50 | 0 | 19.72 | 10.60 | |
| Silty clay loam | NDSS | 78.9 | 1.45 | 0 | 18.23 | 8.30 |
| CM | 80.5 | 1.51 | 0 | 18.96 | 8.50 | |
| Loam | NDSS | 80.2 | 1.35 | 0 | 16.86 | 7.60 |
| CM | 81.9 | 1.40 | 0 | 17.56 | 7.70 | |
| Silty loam | NDSS | 51.1 | 1.30 | 0 | 19.33 | 11.46 |
| CM | 50.4 | 1.30 | 0 | 19.00 | 11.48 | |
| Clay (sixth site) | NDSS | 58.7 | 1.35 | 0 | 19.33 | 10.30 |
| CM | 57.7 | 1.34 | 0 | 19.63 | 10.40 | |
| Source of Variation | Degrees of Freedom | ANOVA SS | Mean Square | F-Value | Pr > F |
|---|---|---|---|---|---|
| Rep | 2 | 6.159258 | 3.079629 | 2.15 | 0.1203 |
| Method measured the SR (M) | 1 | 1.120896 | 1.120896 | 0.78 | 0.3782 |
| M × Rep | 2 | 0.637156 | 0.318578 | 0.22 | 0.8012 |
| Texture (Ts) | 5 | 497.221794 | 99.444359 | 69.27 | <0.0001 |
| Agri-tillage equipment (A − TE) | 5 | 6480.135683 | 1296.027137 | 902.74 | <0.0001 |
| M × TS | 5 | 1.935481 | 0.387096 | 0.27 | 0.9292 |
| M × A-TE | 5 | 1.233259 | 0.246652 | 0.17 | 0.9727 |
| TS × A-TE | 25 | 147.262706 | 5.890508 | 4.10 | <0.0001 |
| Error | 165 | 236.884948 | 1.435666 | -- | -- |
| Total | 215 | 7372.591183 | -- | -- | -- |
| Experimental Fields ID | CP | MP | DP | DH | TH | Control | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MPE | SDPE | MPE | SDPE | MPE | SDPE | MPE | SDPE | MPE | SDPE | MPE | SDPE | |
| % | % | % | % | % | % | % | % | % | % | % | % | |
| Silty clay | −0.40 | 0.29 | −0.40 | 1.10 | 0.50 | 0.88 | −0.20 | 0.54 | −0.20 | 0.29 | 0.30 | 0.17 |
| Clay | 0.80 | 0.60 | 1.86 | 1.10 | 0.50 | 0.61 | 0.53 | 0.72 | −0.20 | 0.54 | −0.33 | 0.39 |
| Silty clay loam | 0.73 | 0.39 | 0.56 | 0.88 | −0.36 | 0.88 | 0.33 | 0.60 | 0.16 | 0.23 | −0.26 | 0.32 |
| Loam | 0.70 | 0.49 | 0.40 | 0.82 | −0.63 | 0.83 | −0.26 | 0.49 | 0.20 | 0.15 | 0.26 | 0.26 |
| Silty loam | −0.33 | 0.88 | 0.50 | 0.66 | −0.30 | 0.33 | 0.03 | 0.66 | 0.02 | 0.66 | 0.20 | 0.61 |
| Clay (6th site) | 0.30 | 0.33 | −0.66 | 1.52 | −0.03 | 0.66 | 0.40 | 0.60 | 0.46 | 1.15 | 0.00 | 0.46 |
| Hardware Component | Quantity | Estimated Cost (USD) |
|---|---|---|
| Arduino microcontroller (Arduino Mega) | 2 boards | 33.5 |
| Laser distance sensor (LDS) Module | 1 | 61.1 |
| Hall effect (HE) sensor (Allegro 3144) | 4 sensors are required | 8.0 |
| 315 MHz RF transmitter and receiver module | 1 | 1.7 |
| Bluetooth module HC-05 | 1 | 7.0 |
| Power supply | 1 | 8.0 |
| Additional components or equipment required (solderless breadboard 400 tie-point, extension flexible wire, plastic Arduino box enclosure case) | 10.0 | |
| Total estimated cost | - | 129.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Shammary, A.A.G.; Caballero-Calvo, A.; Fernández-Gálvez, J. Evaluating the Performance of a Novel Digital Slippage System for Tractor Wheels Across Varied Tillage Methods and Soil Textures. Agriculture 2024, 14, 1957. https://doi.org/10.3390/agriculture14111957
Al-Shammary AAG, Caballero-Calvo A, Fernández-Gálvez J. Evaluating the Performance of a Novel Digital Slippage System for Tractor Wheels Across Varied Tillage Methods and Soil Textures. Agriculture. 2024; 14(11):1957. https://doi.org/10.3390/agriculture14111957
Chicago/Turabian StyleAl-Shammary, Ahmed Abed Gatea, Andrés Caballero-Calvo, and Jesús Fernández-Gálvez. 2024. "Evaluating the Performance of a Novel Digital Slippage System for Tractor Wheels Across Varied Tillage Methods and Soil Textures" Agriculture 14, no. 11: 1957. https://doi.org/10.3390/agriculture14111957
APA StyleAl-Shammary, A. A. G., Caballero-Calvo, A., & Fernández-Gálvez, J. (2024). Evaluating the Performance of a Novel Digital Slippage System for Tractor Wheels Across Varied Tillage Methods and Soil Textures. Agriculture, 14(11), 1957. https://doi.org/10.3390/agriculture14111957