
An Intermittent Fertilization Control System for Fruit Tree Crown Detection

Abstract
1. Introduction
2. Materials and Methods
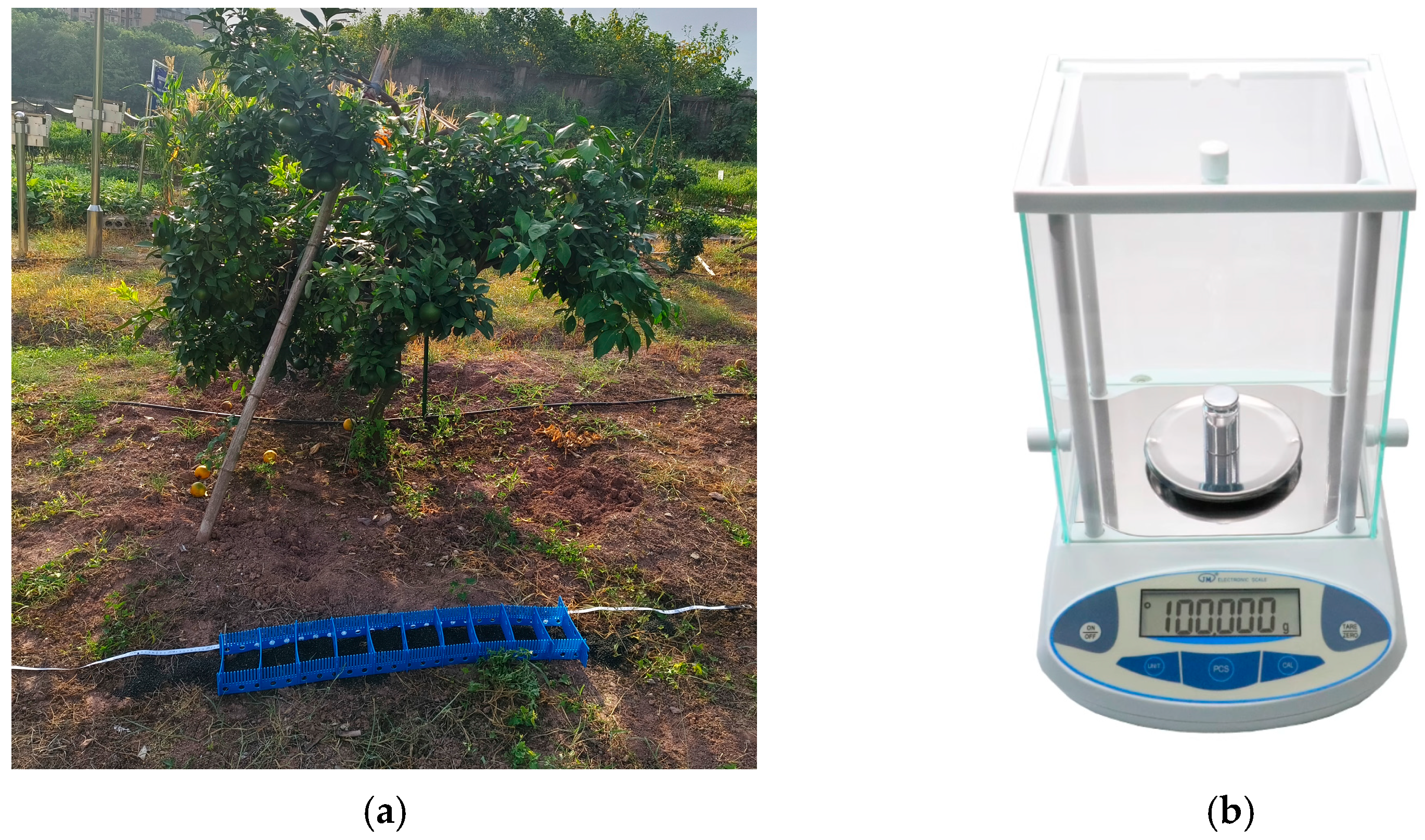
2.1. Test Materials
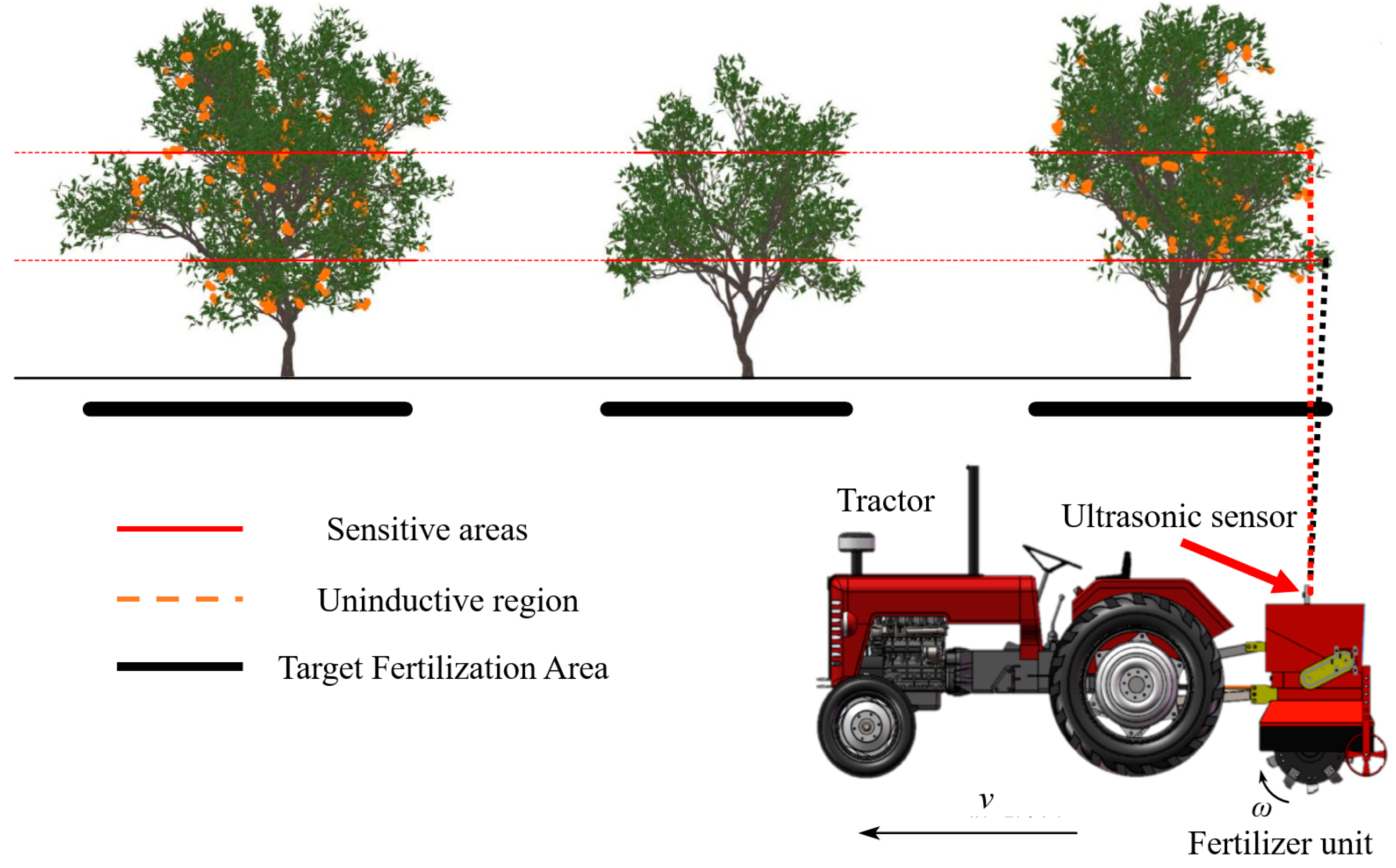
2.2. The Structure and Operational Principle
2.3. Control System Main Program
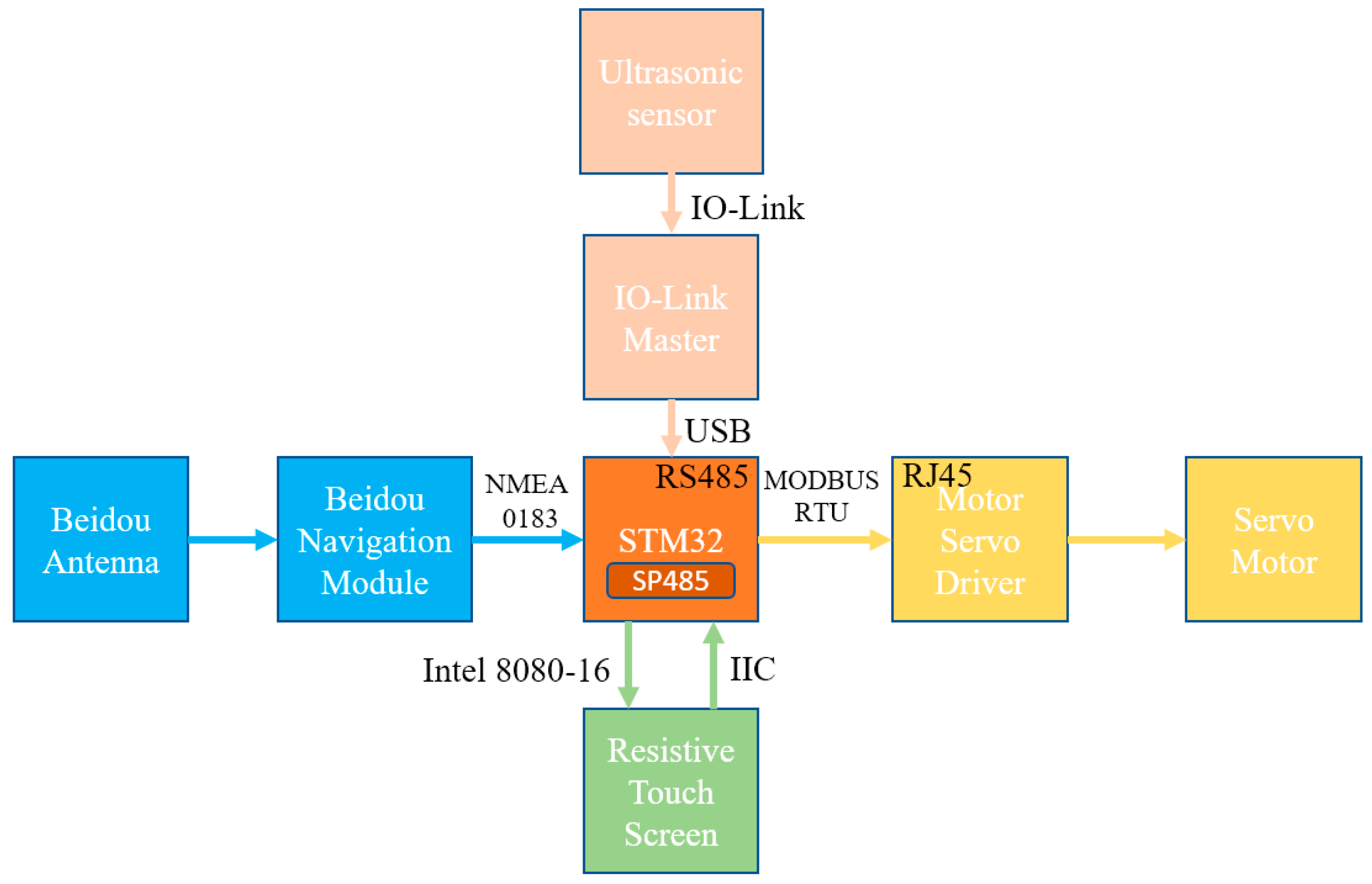
2.3.1. Fertilization System Communication Method
2.3.2. Mathematical Model of Uniform Fertilization
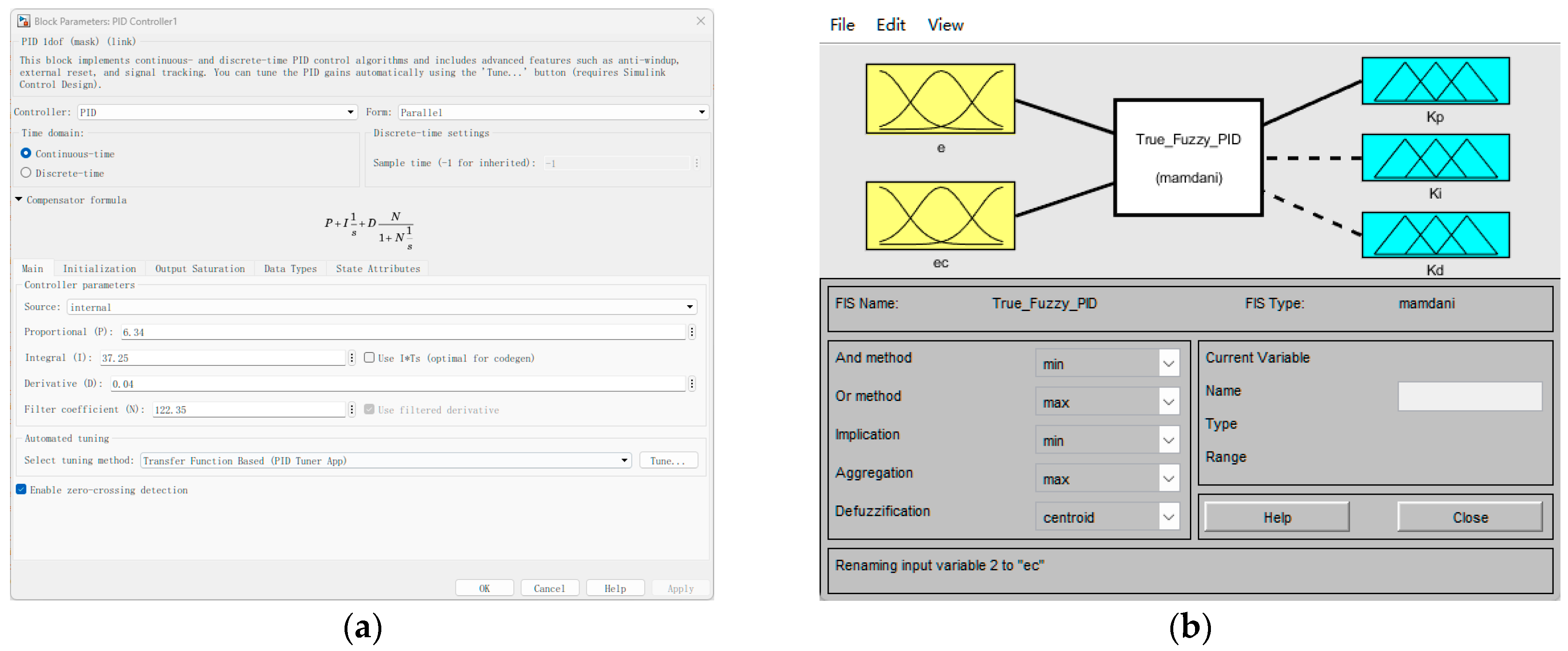
2.3.3. Servo Motor Speed Control Algorithm
3. Experiments and Results
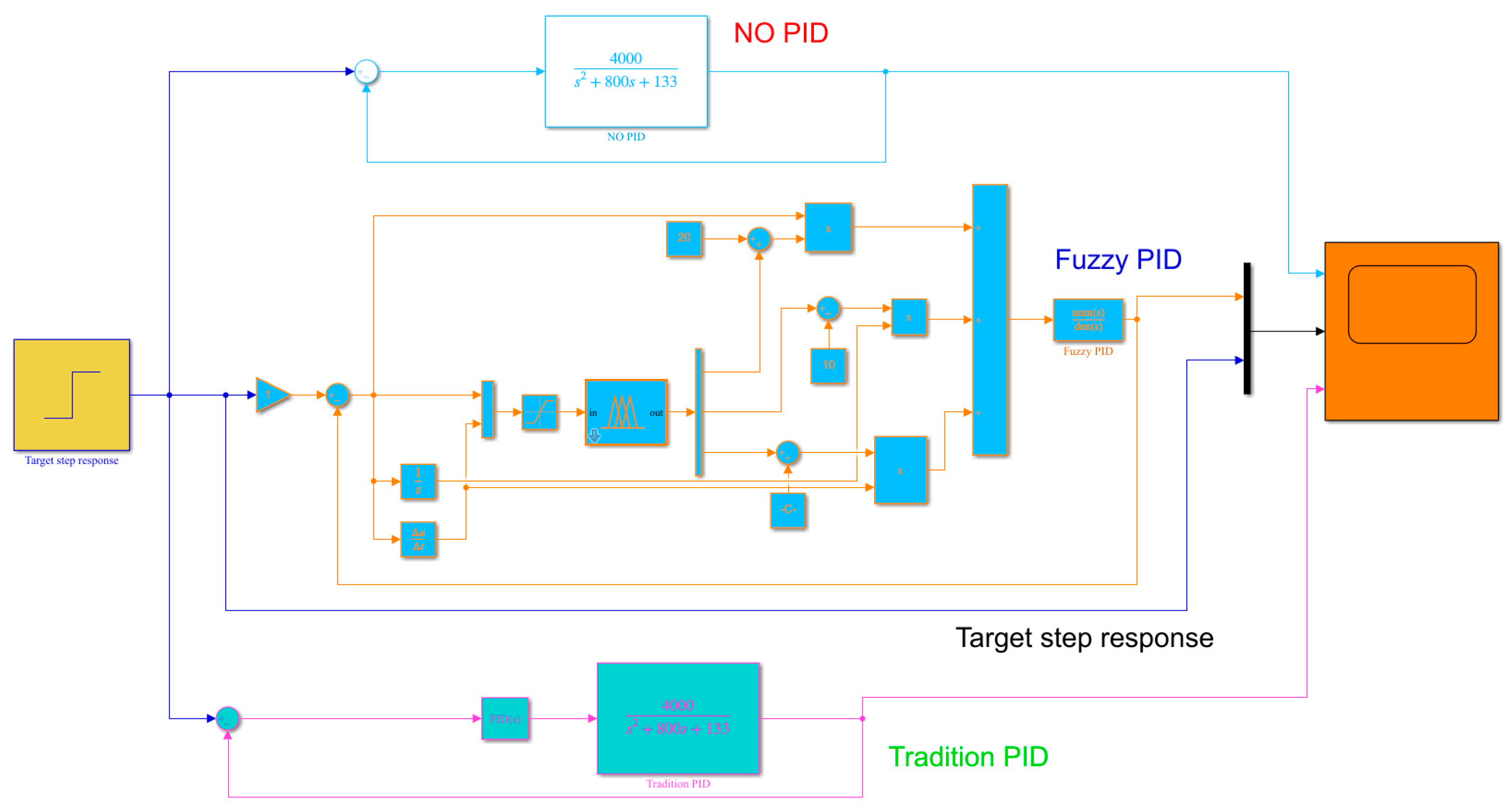
3.1. Analysis of Simulation Test
3.2. Field Verification Test
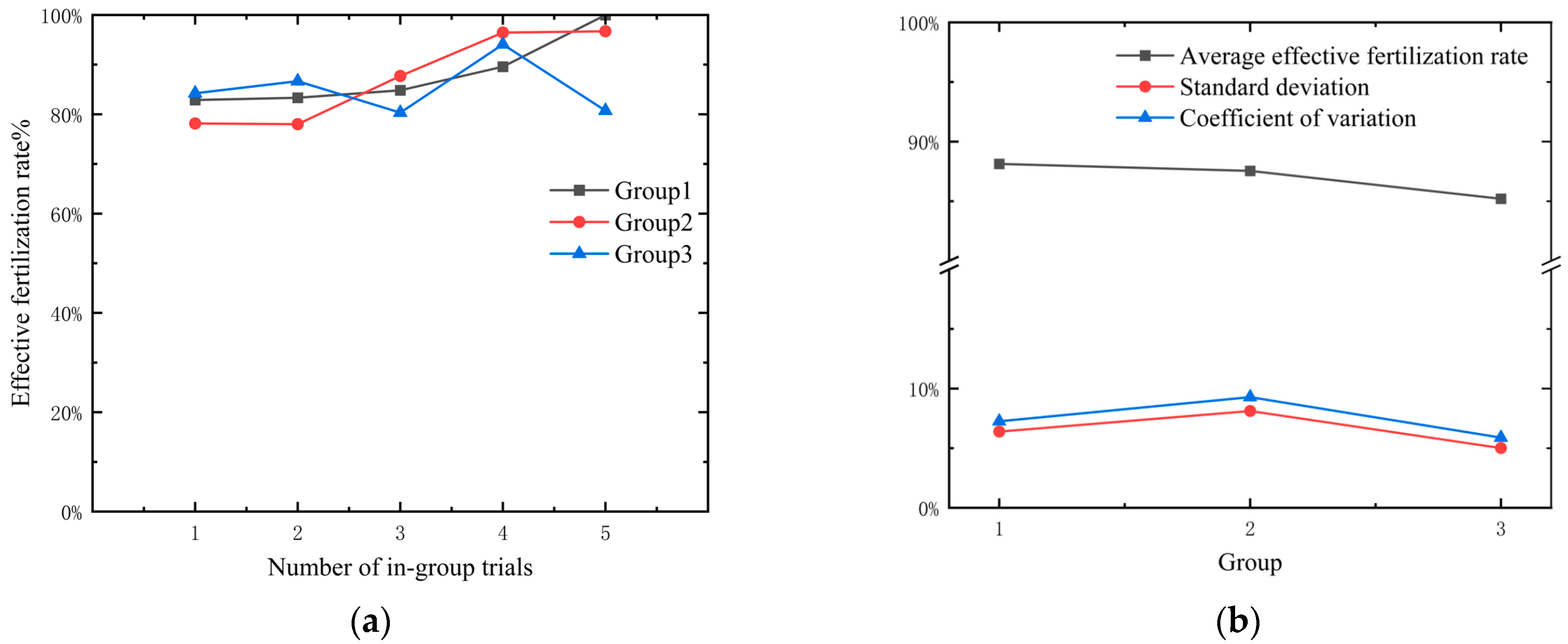
3.2.1. Verification Test of Accuracy Fertilization
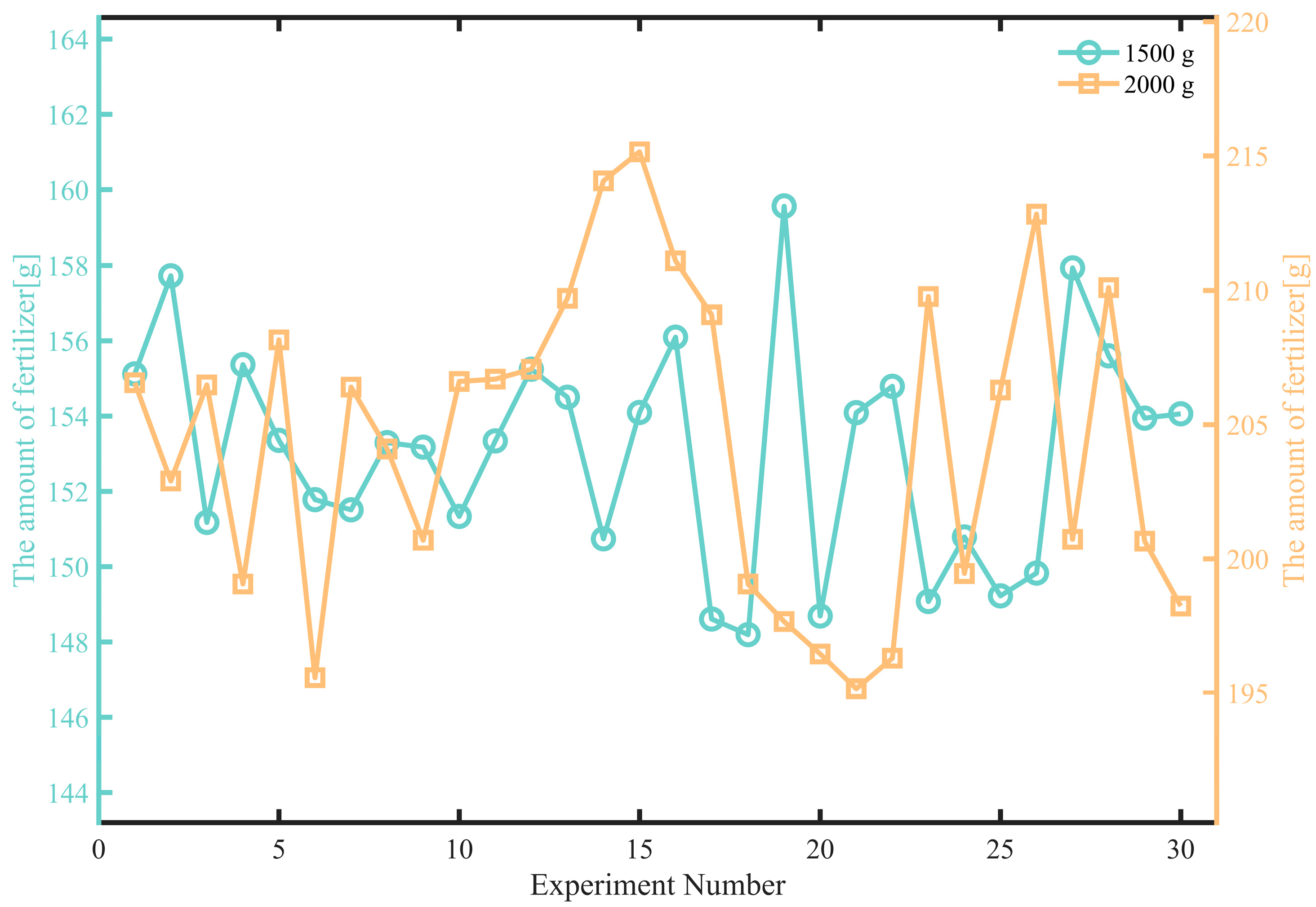
3.2.2. Verification Test of Uniform Fertilization
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, Z.; Chen, H.; Yi, H.; Li, D. Research and Prospect of the Status Quo of Fertilization Machinery in Orchard. Xinjiang Agric. Mech. 2019, 6, 22–25. [Google Scholar] [CrossRef]
- Wang, D.; Li, P.; Yi, X.; Liao, J.; He, Y.; Ran, J.; Zhang, F. Current situation and countermeasures in fertilization process and related machinery application in orchards. J. Fruit Sci. 2021, 38, 792–805. [Google Scholar] [CrossRef]
- National Bureau of Statistics of People’s Republic of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2022.
- Liu, B.; Xiao, H.; Song, Z.; Mei, S. Present State and Trends of Fertilizing Machine in Orchard. J. Agric. Mech. Res. 2017, 39, 263–268. [Google Scholar] [CrossRef]
- Kang, Z.; Lv, J. Discussion on mechanized fertilization technology in orchard. Sci. Technol. Innov. Her. 2013, 32, 30–31. [Google Scholar] [CrossRef]
- NY/T 4252-2022; Ministry of Agriculture of People’s Republic of China Industry Standard-Technical Specifications for Stand-ardized Whole-Course Mechanized Production for Orchards. Ministry of Agriculture of People’s Republic of China: Beijing, China, 2022.
- Yuan, Q.; Zeng, J.; Lei, X.; Xu, T.; Li, X.; Lv, X. Research progress on precision fertilization technology and equipment in orchards. J. Chin. Agric. Mech. 2024, 45, 58. [Google Scholar] [CrossRef]
- Bai, Q.; Luo, H.; Fu, X.; Zhang, X.; Li, G. Design and Experiment of Lightweight Dual-Mode Automatic Variable-Rate Fertilization Device and Control System. Agriculture 2023, 13, 1138. [Google Scholar] [CrossRef]
- Liu, Y. Research on Key Technologies of Precision Operation Equipment for Variable Rate Fertilization. Ph.D. Thesis, Chinese Academy of Agricultural Mechanization Sciences, Beijing, China, 2012. [Google Scholar]
- Wang, X.; Tang, Y.; Lan, H.; Liu, Y.; Zeng, Y.; Tang, Z.; He, Y.; Zhang, Y. Performance Analysis and Testing of Spiral Quantitative Fertiliser Distributors in Orchards. Appl. Sci. 2023, 13, 8941. [Google Scholar] [CrossRef]
- Yang, S.; Zhai, C.; Long, J.; Zhang, B.; Li, H. Wolfberry tree dual-model detection method and orchard target-oriented fertilization system based on photoelectric sensors. Int. J. Agric. Biol. Eng. 2018, 11, 47–53. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, C.-L.; Li, Y.-M.; Zeng, Q.; Zha, X.F. Gaussian processes based bivariate control parameters optimization of variable-rate granular fertilizer applicator. Comput. Electron. Agric. 2010, 70, 33–41. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, C.; Wu, C.; Du, Q.; Han, Y.; Zhao, X. Development and application of a variable rate fertilizer applicator for precision agriculture. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2003, 19, 129–131. [Google Scholar]
- Dang, Y.; Yang, G.; Wang, J.; Zhou, Z.; Xu, Z. A Decision-Making Capability Optimization Scheme of Control Combination and PID Controller Parameters for Bivariate Fertilizer Applicator Improved by Using EDEM. Agriculture 2022, 12, 2100. [Google Scholar] [CrossRef]
- Bai, J.; Tian, M.; Li, J. Control System of Liquid Fertilizer Variable-Rate Fertilization Based on Beetle Antennae Search Algorithm. Processes 2022, 10, 357. [Google Scholar] [CrossRef]
- Huai, B.; Zhang, C.; Zhang, P.; Han, J.; Wang, X.; Zhuang, W. BP-PID Control Method in Control System of Variable Rate Fertilizer Application. J. Heilongjiang Bayi Agric. Univ. 2015, 27, 95–98. [Google Scholar]
- Wan, C.; Yang, J.; Zhou, L.; Wang, S.; Peng, J.; Tan, Y. Fertilization Control System Research in Orchard Based on the PSO-BP-PID Control Algorithm. Machines 2022, 10, 982. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, S.; Ji, W.; Zhu, B.; Zheng, P. Precision Fertilization Control System Research for Solid Fertilizers Based on Incremental PID Control Algorithm. Trans. Chin. Soc. Agric. Mach. 2021, 52, 99–106. [Google Scholar]
- Chaib, L.; Choucha, A.; Arif, S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic Bat algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef]
- Qi, C.; Gu, Y.; Zeng, Y. Progress of citrus industry economy in China. J. Huazhong Agric. Univ. 2021, 40, 58–69. [Google Scholar] [CrossRef]
- Gu, Y.; Qi, C.; Liu, F.; Lei, Q.; Ding, Y. Spatiotemporal Evolution and Spatial Convergence Analysis of Total Factor Productivity of Citrus in China. Agriculture 2023, 13, 1258. [Google Scholar] [CrossRef]
- Deng, X. A Review and Perspective for Citrus Breeding in China During the Last Six Decades. Acta Hortic. Sin. 2022, 49, 2063–2074. [Google Scholar] [CrossRef]
- Forner-Giner, M.A.; Continella, A.; Grosser, J.W. Citrus Rootstock Breeding and Selection. In The Citrus Genome. Compendium of Plant Genomes; Gentile, A., La Malfa, S., Deng, Z., Eds.; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Schumann, A.W.; Zaman, Q.U. Software development for real-time ultrasonic mapping of tree canopy size. Comput. Electron. Agric. 2005, 47, 25–40. [Google Scholar] [CrossRef]
- GB/T 35487-2017; National Standard of China Machinery Industry Federation-Variable Fertilizing and Seeding Machine Control System. China Machinery Industry Federation (CMIF): Beijing, China, 2017.
- Wulantuya; Wang, H.; Wang, C.; Qing, L. Theoretical Analysis and Experimental Study on the Process of Conveying Agricultural Fiber Materials by Screw Conveyors. Eng. Agríc. 2020, 40, 589–594. [Google Scholar] [CrossRef]
- Tang, L.; Wang, W.; Zhang, C.; Wang, Z.; Ge, Z.; Yuan, S. Linear Active Disturbance Rejection Control System for the Travel Speed of an Electric Reel Sprinkling Irrigation Machine. Agriculture 2024, 14, 1544. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y. The simulation of servo motor system based on fuzzy PID control. Electron. Des. Eng. 2019, 27, 174–179. [Google Scholar] [CrossRef]
- Mishra, P.; Kumar, V.; Rana, K.P.S. A fractional order fuzzy PID controller for binary distillation column control. Expert Syst. Appl. 2015, 42, 8533–8549. [Google Scholar] [CrossRef]
- Premkumar, K.; Manikandan, B.V. Fuzzy PID supervised online ANFIS based speed controller for brushless dc motor. Neurocomputing 2015, 157, 76–90. [Google Scholar] [CrossRef]
- GB/T 20346.2-2022; National Standard of China Machinery Industry Federation-Equipment for Distributing Fertilizer—Part 2: Fertilizer Distributor in Lines. China Machinery Industry Federation (CMIF): Beijing, China, 2022.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resolution | Repeat Accuracy | Accuracy | Response Time | Switching Frequency | Detonation Output Time | Ultrasonic Frequency |
|---|---|---|---|---|---|---|
| ≥0.18 mm | ±0.15% | ±1% | 180 ms | 4 Hz | 43 ms | 120 kHz |
| Fruit Species | Tree Age (Year) | Crown Area (m2) | Fertilizer Types | Target Fertilization Amount m(kg) |
|---|---|---|---|---|
| Ehime Orange | 1~5 | 0.385 | Compound fertilizer | 0.15 |
| Bio-organic fertilizer | 0.4 | |||
| Yard manure | 1.5 | |||
| 6~10 | 0.636 | Compound fertilizer | 0.18 | |
| Bio-organic fertilizer | 0.5 | |||
| Yard manure | 1.7 | |||
| 11~15 | 0.785 | Compound fertilizer | 0.2 | |
| Bio-organic fertilizer | 0.6 | |||
| Yard manure | 2 |
| Kp\Ki\Kd | ec | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| e | NB | PB\NB\PS | PB\NB\NS | PM\NM\NB | PM\NM\NB | PS\NS\NB | ZO\ZO\NM | ZO\ZO\PS |
| NM | PB\NB\PS | PB\NB\NS | PM\NM\NB | PS\NS\NM | PS\NS\NM | ZO\ZO\NS | NS\ZO\ZO | |
| NS | PM\NB\ZO | PM\NM\NS | PS\NS\NM | PS\NS\NM | ZO\ZO\NS | NS\PS\NS | NS\PS\ZO | |
| ZO | PM\NM\ZO | PM\NM\NS | PS\NS\NS | ZO\ZO\NS | NS\PS\NS | NM\PM\NS | NM\PM\ZO | |
| PS | PS\NM\ZO | PS\NS\ZO | ZO\ZO\ZO | NS\PS\ZO | NS\PS\ZO | NM\PM\ZO | NM\PB\ZO | |
| PM | PS\ZO\PB | ZO\ZO\NS | NS\PS\PS | NM\PS\PS | NM\PM\PS | NM\PB\PS | NB\PB\PB | |
| PB | ZO\ZO\PB | ZO\ZO\PM | NM\PS\PM | NM\PM\PM | NM\PM\PS | NB\PB\PS | NB\PB\PB | |
| Test Number | Group 1 | ||||
|---|---|---|---|---|---|
| Crown Width/cm | Fertilization Length/cm | Fertilization Offset/cm | Effective Fertilization Length/cm | Effective Fertilization Rate | |
| 1 | 125 | 120 | 8 | 112 | 89.60% |
| 2 | 145 | 138 | 15 | 123 | 84.83% |
| 3 | 152 | 141 | 15 | 126 | 82.89% |
| 4 | 170 | 172 | 0 | 172 | 100.00% |
| 5 | 180 | 166 | 16 | 150 | 83.33% |
| Average | 154.4 | 147.4 | 10.8 | 136.6 | 88.13% |
| Test Number | Group 2 | ||||
|---|---|---|---|---|---|
| Crown Width/cm | Fertilization Length/cm | Fertilization Offset/cm | Effective Fertilization Length/cm | Effective Fertilization Rate | |
| 1 | 119 | 102 | 9 | 93 | 78.15% |
| 2 | 152 | 155 | 8 | 147 | 96.71% |
| 3 | 155 | 135 | 13 | 122 | 78.71% |
| 4 | 170 | 168 | 4 | 164 | 96.47% |
| 5 | 171 | 161 | 11 | 150 | 87.72% |
| Average | 153.4 | 135.2 | 9 | 135.2 | 87.55% |
| Test Number | Group 3 | ||||
|---|---|---|---|---|---|
| Crown Width/cm | Fertilization Length/cm | Fertilization Offset/cm | Effective Fertilization Length/cm | Effective Fertilization Rate | |
| 1 | 165 | 150 | 11 | 139 | 84.24% |
| 2 | 165 | 160 | 17 | 143 | 86.67% |
| 3 | 173 | 160 | 21 | 139 | 80.35% |
| 4 | 186 | 182 | 7 | 175 | 94.09% |
| 5 | 192 | 178 | 23 | 155 | 80.73% |
| Average | 176.2 | 166 | 15.8 | 150.2 | 85.21% |
| Experiment Number | The Amount of Fertilizer/g | Experiment Number | The Amount of Fertilizer/g | Experiment Number | The Amount of Fertilizer/g |
|---|---|---|---|---|---|
| 1 | 155.12 | 11 | 153.34 | 21 | 154.09 |
| 2 | 157.725 | 12 | 155.245 | 22 | 154.79 |
| 3 | 151.175 | 13 | 154.5 | 23 | 149.075 |
| 4 | 155.365 | 14 | 150.74 | 24 | 150.79 |
| 5 | 153.355 | 15 | 154.095 | 25 | 149.225 |
| 6 | 151.78 | 16 | 156.095 | 26 | 149.83 |
| 7 | 151.51 | 17 | 148.61 | 27 | 157.935 |
| 8 | 153.295 | 18 | 148.195 | 28 | 155.6 |
| 9 | 153.175 | 19 | 159.57 | 29 | 153.945 |
| 10 | 151.335 | 20 | 148.69 | 30 | 154.06 |
| Average | 153.3835 | 152.908 | 152.934 |
| Experiment Number | The Amount of Fertilizer/g | Experiment Number | The Amount of Fertilizer/g | Experiment Number | The Amount of Fertilizer/g |
|---|---|---|---|---|---|
| 1 | 206.56 | 11 | 206.695 | 21 | 195.16 |
| 2 | 202.9 | 12 | 207.065 | 22 | 196.295 |
| 3 | 206.48 | 13 | 209.705 | 23 | 209.775 |
| 4 | 199.065 | 14 | 214.065 | 24 | 199.455 |
| 5 | 208.16 | 15 | 215.15 | 25 | 206.29 |
| 6 | 195.57 | 16 | 211.105 | 26 | 212.845 |
| 7 | 206.4 | 17 | 209.095 | 27 | 200.725 |
| 8 | 204.095 | 18 | 199.06 | 28 | 210.105 |
| 9 | 200.69 | 19 | 197.66 | 29 | 200.66 |
| 10 | 206.61 | 20 | 196.455 | 30 | 198.24 |
| Average | 203.653 | 206.6055 | 202.955 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, H.; Jing, P.; Ma, C.; Cao, L.; Li, C.; Wang, L. An Intermittent Fertilization Control System for Fruit Tree Crown Detection. Agriculture 2024, 14, 1867. https://doi.org/10.3390/agriculture14111867
Yin H, Jing P, Ma C, Cao L, Li C, Wang L. An Intermittent Fertilization Control System for Fruit Tree Crown Detection. Agriculture. 2024; 14(11):1867. https://doi.org/10.3390/agriculture14111867
Chicago/Turabian StyleYin, Hao, Pengyu Jing, Chen Ma, Liewang Cao, Chengsong Li, and Lihong Wang. 2024. "An Intermittent Fertilization Control System for Fruit Tree Crown Detection" Agriculture 14, no. 11: 1867. https://doi.org/10.3390/agriculture14111867
APA StyleYin, H., Jing, P., Ma, C., Cao, L., Li, C., & Wang, L. (2024). An Intermittent Fertilization Control System for Fruit Tree Crown Detection. Agriculture, 14(11), 1867. https://doi.org/10.3390/agriculture14111867