
A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot




Abstract
1. Introduction
2. Materials and Methods
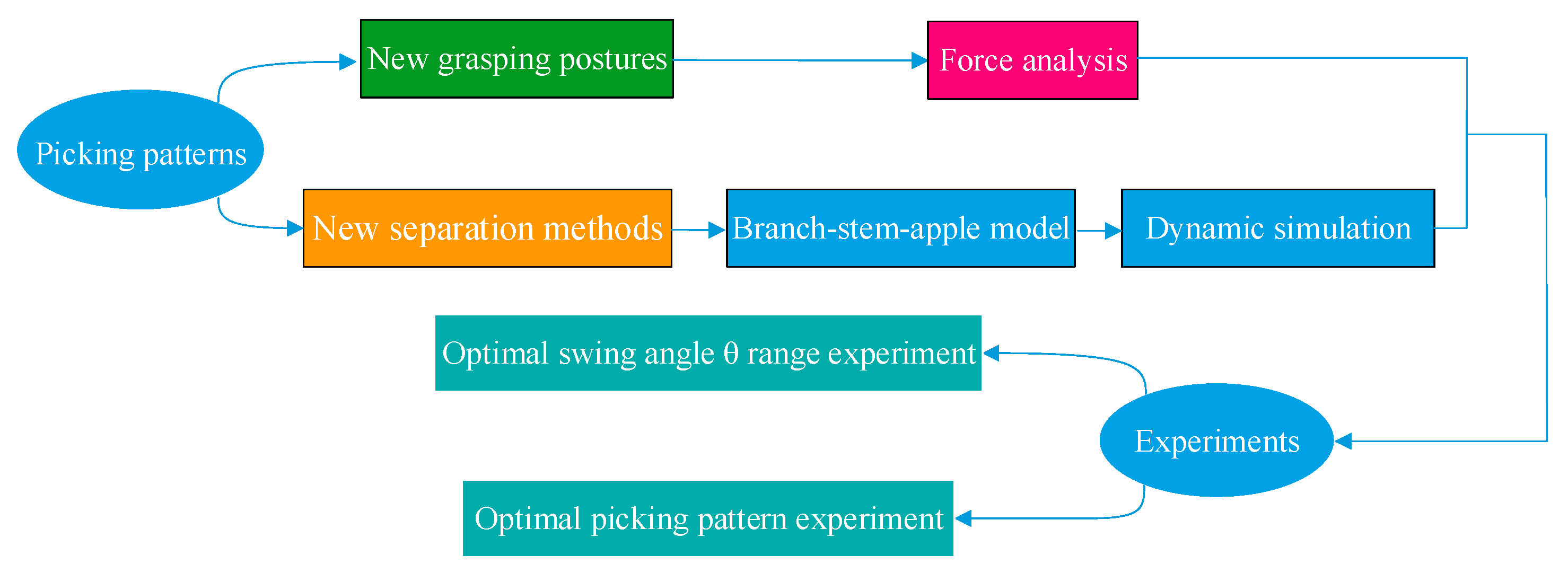
2.1. Flexible Three-Fingered End-Effector Picking Pattern Design
2.1.1. Grasp Posture Design of Gripper
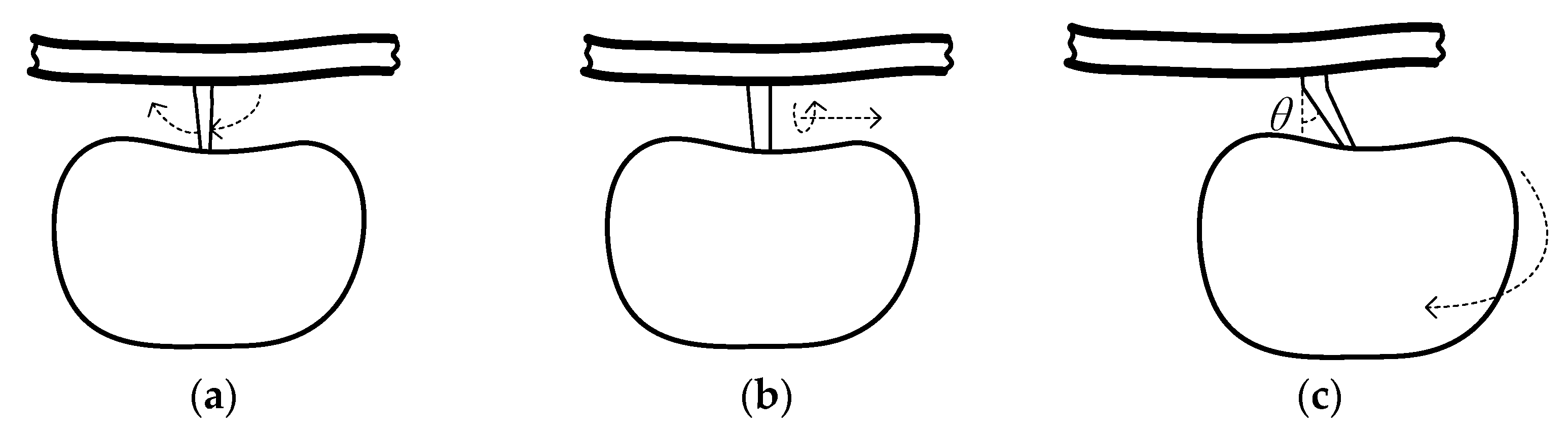
2.1.2. Stem Separation Method Design of Gripper
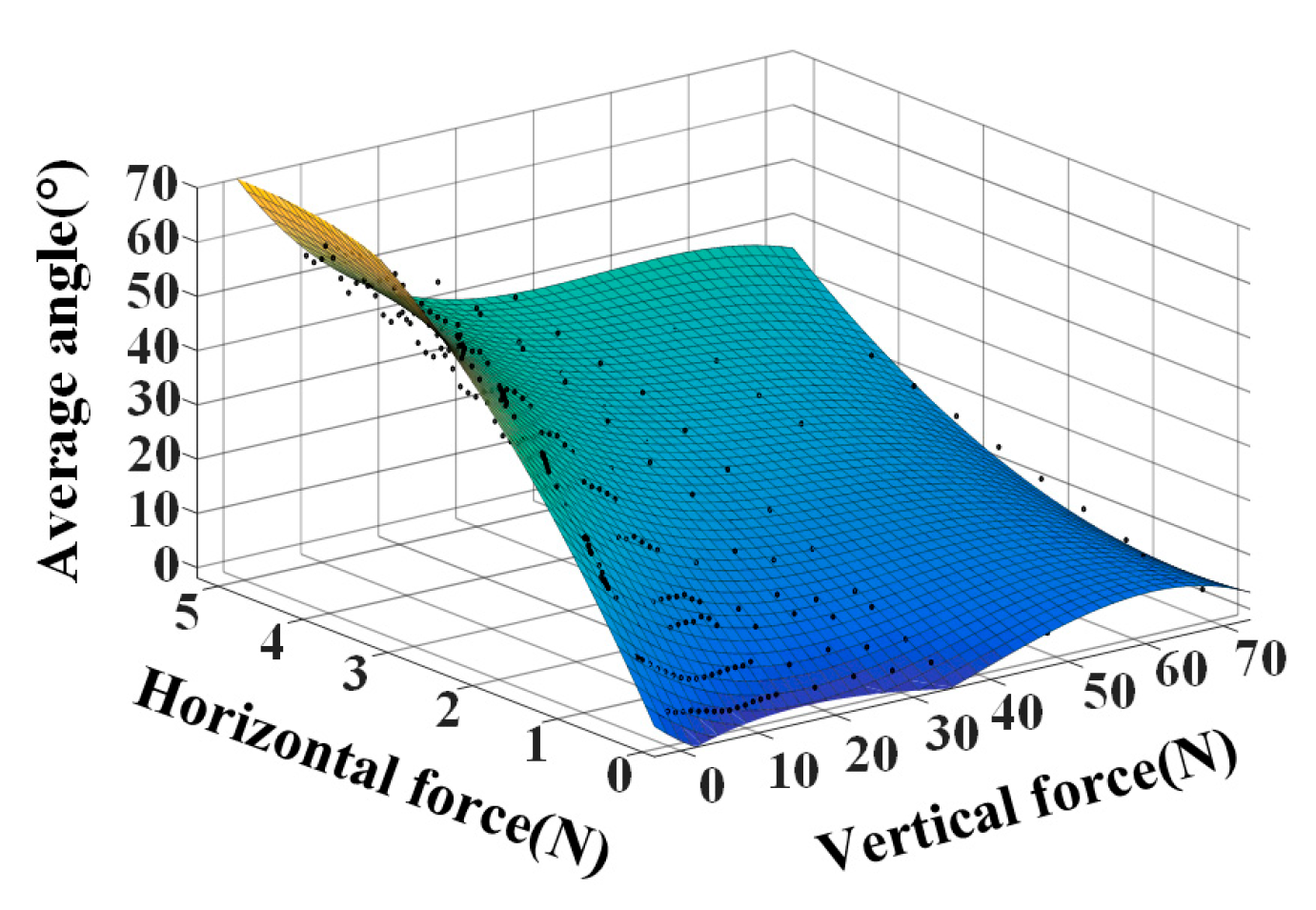
2.1.3. Force Analysis of Picking Pattern
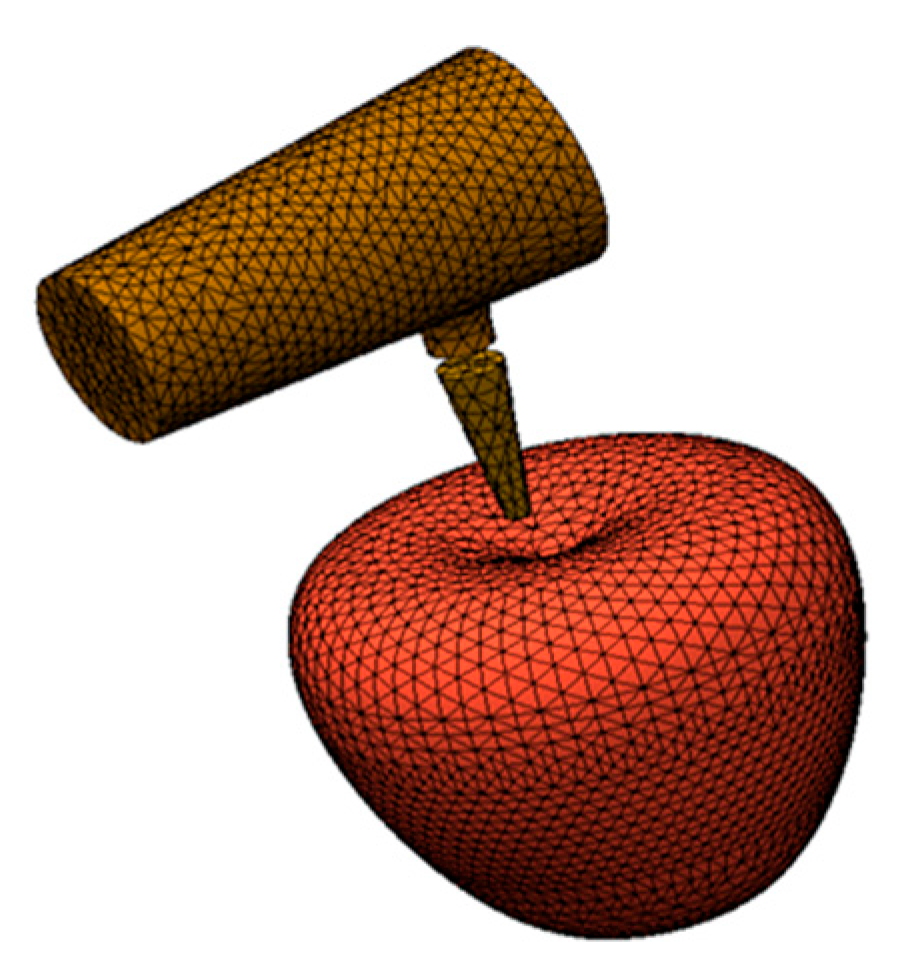
2.2. Dynamic Simulation
2.2.1. Swing Angle and Motion Speed
2.2.2. Picking Pattern Optimization
2.3. Harvesting Robot System Overview
2.4. Gripper Control System
3. Result and Discussion
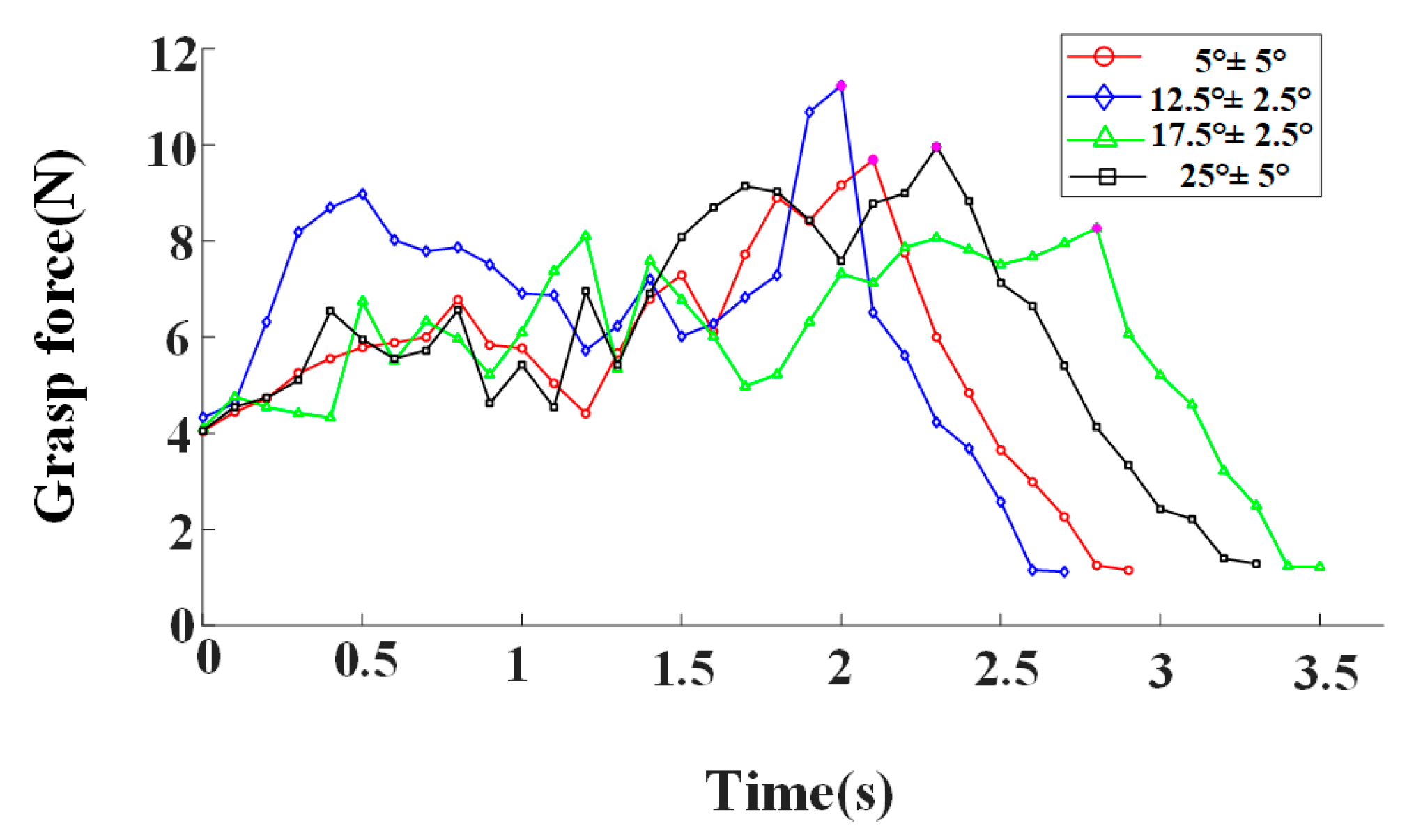
3.1. Optimal Swing Angle θ Range Experiment
3.2. Optimal Picking Pattern Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Igathinathane, C.; Li, J.; Cen, H.; Lu, Y.; Flores, P. Technology progress in mechanical harvest of fresh market apples. Comput. Electron. Agric. 2020, 175, 105606. [Google Scholar] [CrossRef]
- Zhao, K.; Li, H.; Ji, J.; Li, Q.; Li, M.; He, Y.; Xing, S. Pressure-stabilized flexible end-effector for selective picking of agaricus bisporus. Agriculture 2023, 13, 2256. [Google Scholar] [CrossRef]
- Zhang, K.; Lammers, K.; Chu, P.; Li, Z.; Lu, R. System design and control of an apple harvesting robot. Mechatronics 2021, 79, 102644. [Google Scholar] [CrossRef]
- Miao, Y.; Zheng, J. Optimization design of compliant constant-force mechanism for apple picking actuator. Comput. Electron. Agric. 2020, 170, 105232. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, B. A two-finger soft gripper based on bistable mechanism. IEEE Robot. Autom. Lett. 2022, 7, 11330–11337. [Google Scholar] [CrossRef]
- Hou, T.; Yang, X.; Aiyama, Y.; Liu, K.; Wang, Z.; Wang, T.; Liang, J.; Fan, Y. Design and experiment of a universal two-fingered hand with soft fingertips based on jamming effect. Mech. Mach. Theory 2018, 133, 706–719. [Google Scholar] [CrossRef]
- Natarajan, E.; Solihin, M.I.; Chong, J.H. Grasp stability analysis of an isotropic direct driven three-finger soft robot hand. Int. J. Adv. Sci. Eng. Inf. Technol. 2017, 7, 1627–1631. [Google Scholar] [CrossRef]
- Liu, C.H.; Chung, F.M.; Chen, Y.; Chiu, C.H.; Chen, T.L. Optimal design of a motor-driven three-finger soft robotic gripper. IEEE/ASME Trans. Mechatron. 2020, 25, 1830–1840. [Google Scholar] [CrossRef]
- Pozzi, M.; Malvezzi, M.; Prattichizzo, D. On grasp quality measures: Grasp robustness and contact force distribution in underactuated and compliant robotic hands. IEEE Robot. Autom. Lett. 2016, 2, 329–336. [Google Scholar] [CrossRef]
- Ji, W.; Tang, C.; Xu, B.; He, G. Contact force modeling and variable damping impedance control of apple harvesting robot. Comput. Electron. Agric. 2022, 198, 107026. [Google Scholar] [CrossRef]
- Lewis, R.; Yoxall, A.; Marshall, M.B.; Canty, L.A. Characterising pressure and bruising in apple fruit. Wear 2008, 264, 37–46. [Google Scholar] [CrossRef]
- Zeebroeck, V.M.; Darius, P.; Ketelaere, D.B.; Ramon, H.; Tijskens, E. The effect of fruit factors on the bruise susceptibility of apples. Postharvest Biol. Technol. 2007, 46, 10–19. [Google Scholar] [CrossRef]
- Li, J.; Karkee, M.; Zhang, Q.; Xiao, K.; Feng, T. Characterizing apple picking patterns for robotic harvesting. Comput. Electron. Agric. 2016, 127, 633–640. [Google Scholar] [CrossRef]
- Fan, P.; Yan, B.; Wang, M.; Lei, X.; Liu, Z.; Yang, F. Three-finger grasp planning and experimental analysis of picking patterns for robotic apple harvesting. Comput. Electron. Agric. 2021, 188, 106353. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Zhou, J.; Sugirbay, A.; Chen, J. Investigating the dynamic behavior of an apple branch-stem-fruit model using experimental and simulation analysis. Comput. Electron. Agric. 2021, 186, 106224. [Google Scholar] [CrossRef]
- Crooke, J.R.; Rand, R.H. Vibratory fruit harvesting: A linear theory of fruit-stem dynamics. J. Agric. Eng. Res. 1969, 14, 195–209. [Google Scholar] [CrossRef]
- Ye, W.; Zhao, L.; Luo, X.; Guo, J.; Liu, X. Perceptual soft end-effectors for future unmanned agriculture. Sensors 2023, 23, 7905. [Google Scholar] [CrossRef]
- Abdallah, B.M.; Khemili, I.; Aifaoui, N. Numerical investigation of a flexible slider–crank mechanism with multi-joints with clearance. Multibody Syst. Dyn. 2016, 38, 173–199. [Google Scholar] [CrossRef]
- Bu, L.; Chen, C.; Hu, G.; Sugirbay, A.; Sun, H.; Chen, J. Design and evaluation of a robotic apple harvester using optimized picking patterns. Comput. Electron. Agric. 2022, 198, 107092. [Google Scholar] [CrossRef]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F. Design and evaluation of a two-section canopy shaker with variable frequency for mechanical harvesting of citrus. Int. J. Agric. Biol. Eng. 2018, 11, 77–87. [Google Scholar] [CrossRef]
- Hu, G.; Bu, L.; Chen, J. Simulation to determination of significant parameters on apple stress for combing harvesting in trellis trained trees. Sci. Hortic. 2020, 274, 109654. [Google Scholar] [CrossRef]
- Horbens, M.; Branke, D.; Gärtner, R.; Voigt, A.; Stenger, F.; Neinhuis, C. Multi-scale simulation of plant stem reinforcement by brachysclereids: A case study in apple fruit peduncles. J. Struct. Biol. 2015, 192, 116–126. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Song, Y.P.; Gao, D.S.; Liu, H.J.; Guiju, F.; Zhang, T. Dynamics simulation and experimental research on sawing quality of apple branch. J. Chin. Agric. Mech. 2017, 38, 44–50. [Google Scholar] [CrossRef]
- Ahmadi, E.; Barikloo, H.; Kashfi, M. Viscoelastic finite element analysis of the dynamic behavior of apple under impact loading with regard to its different layers. Comput. Electron. Agric. 2016, 121, 1–11. [Google Scholar] [CrossRef]
- Ji, W.; Zhang, T.; Xu, B.; He, G. Apple recognition and picking sequence planning for harvesting robot in the complex environment. J. Agric. Eng. 2023. [Google Scholar] [CrossRef]
- Ji, W.; Pan, Y.; Xu, B.; Wang, J. A real-time Apple targets detection method for picking robot based on ShufflenetV2-YOLOX. Agriculture 2022, 12, 856. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density (kg ) | (MPa) | (MPa) | (MPa) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Branch | 600 | 296 | 296 | 6274 | 0.49 | 0.063 | 0.063 | 33 | 310 | 310 |
| Stem | 300 | 29.8 | 29.8 | 439.8 | 0.49 | 0.031 | 0.031 | 26.7 | 1.8 | 1.8 |
| Apple | Density (kg) | E (MPa) | ||||||||
| Skin | 840 | 12 | 0.35 | |||||||
| Cortex | 840 | 5 | 0.35 | |||||||
| Core | 950 | 7 | 0.35 |
| Swing Angle () | Average Peak Force (N) | Average Peak Pressure (KPa) | Average Hold Force (N) | Average Hold Pressure (KPa) | Average Pick Time (s) |
|---|---|---|---|---|---|
| 5° ± 5° | 8.904708 | 21.825 | 1.380253 | 3.383 | 3.1 |
| 12.5° ± 2.5° | 10.685652 | 26.19 | 1.089093 | 2.669 | 2.9 |
| 17.5° ± 2.5° | 8.520288 | 20.883 | 1.243031 | 3.047 | 3.9 |
| 25° ± 5° | 8.692691 | 21.306 | 1.457324 | 3.572 | 3.4 |
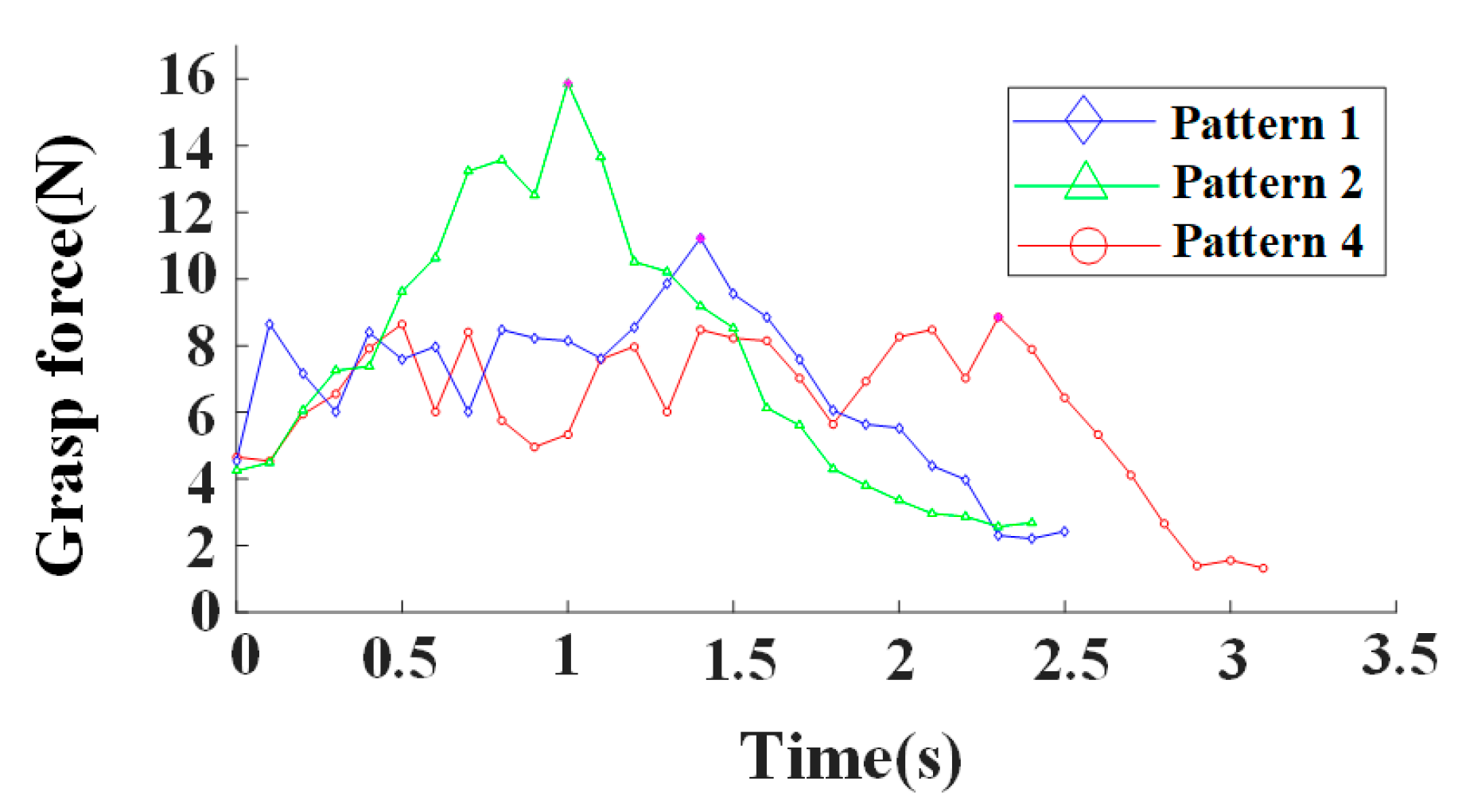
| Picking Pattern | Average Peak Force (N) | Average Peak Pressure (KPa) | Average Hold Force (N) | Average Hold Pressure (KPa) | Average Pick Time (s) |
|---|---|---|---|---|---|
| Pattern 1 [13] | 10.219213 | 60.113 | 2.834512 | 16.673 | 2.5 |
| Pattern 2 [14] | 14.713971 | 86.552 | 2.861234 | 16.831 | 1.9 |
| Pattern 3 [proposed] | 8.862305 | 21.721 | 0.452032 | 1.108 | 3.6 |
| Pattern 4 [proposed] | 8.520288 | 20.883 | 1.243031 | 3.047 | 3.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, W.; He, G.; Xu, B.; Zhang, H.; Yu, X. A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot. Agriculture 2024, 14, 102. https://doi.org/10.3390/agriculture14010102
Ji W, He G, Xu B, Zhang H, Yu X. A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot. Agriculture. 2024; 14(1):102. https://doi.org/10.3390/agriculture14010102
Chicago/Turabian StyleJi, Wei, Guozhi He, Bo Xu, Hongwei Zhang, and Xiaowei Yu. 2024. "A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot" Agriculture 14, no. 1: 102. https://doi.org/10.3390/agriculture14010102
APA StyleJi, W., He, G., Xu, B., Zhang, H., & Yu, X. (2024). A New Picking Pattern of a Flexible Three-Fingered End-Effector for Apple Harvesting Robot. Agriculture, 14(1), 102. https://doi.org/10.3390/agriculture14010102