
Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors


Abstract
:1. Introduction
2. Materials and Methods
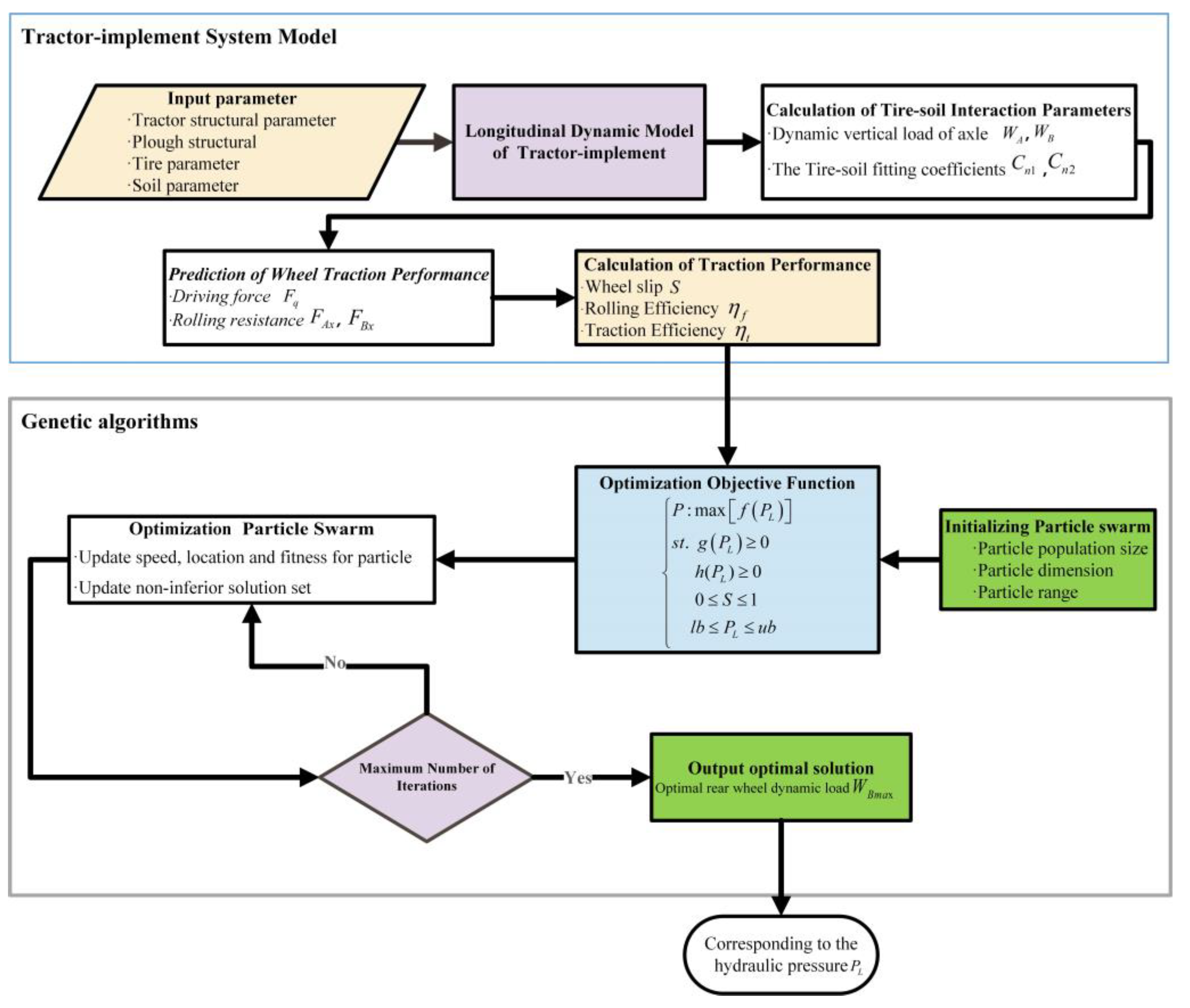
2.1. Traction Performance Prediction Model
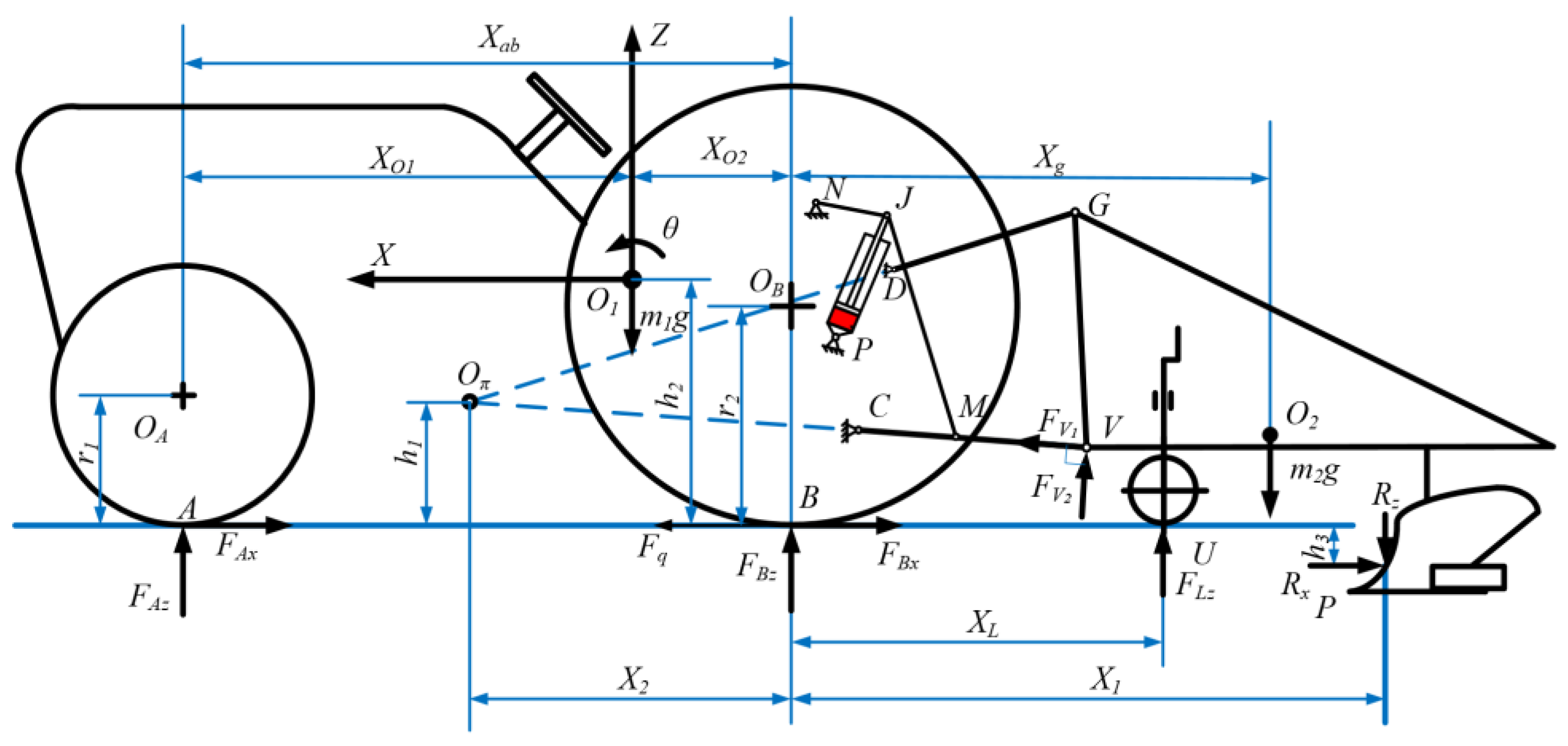
2.1.1. Tractor Implement System Dynamic Model
2.1.2. Force Analysis of Electric Tractor Implement System
- (1)
- Force Analysis of Electric Tractor under Static Load
- (2)
- Force Analysis of Electric Tractor under Dynamic Load
- (3)
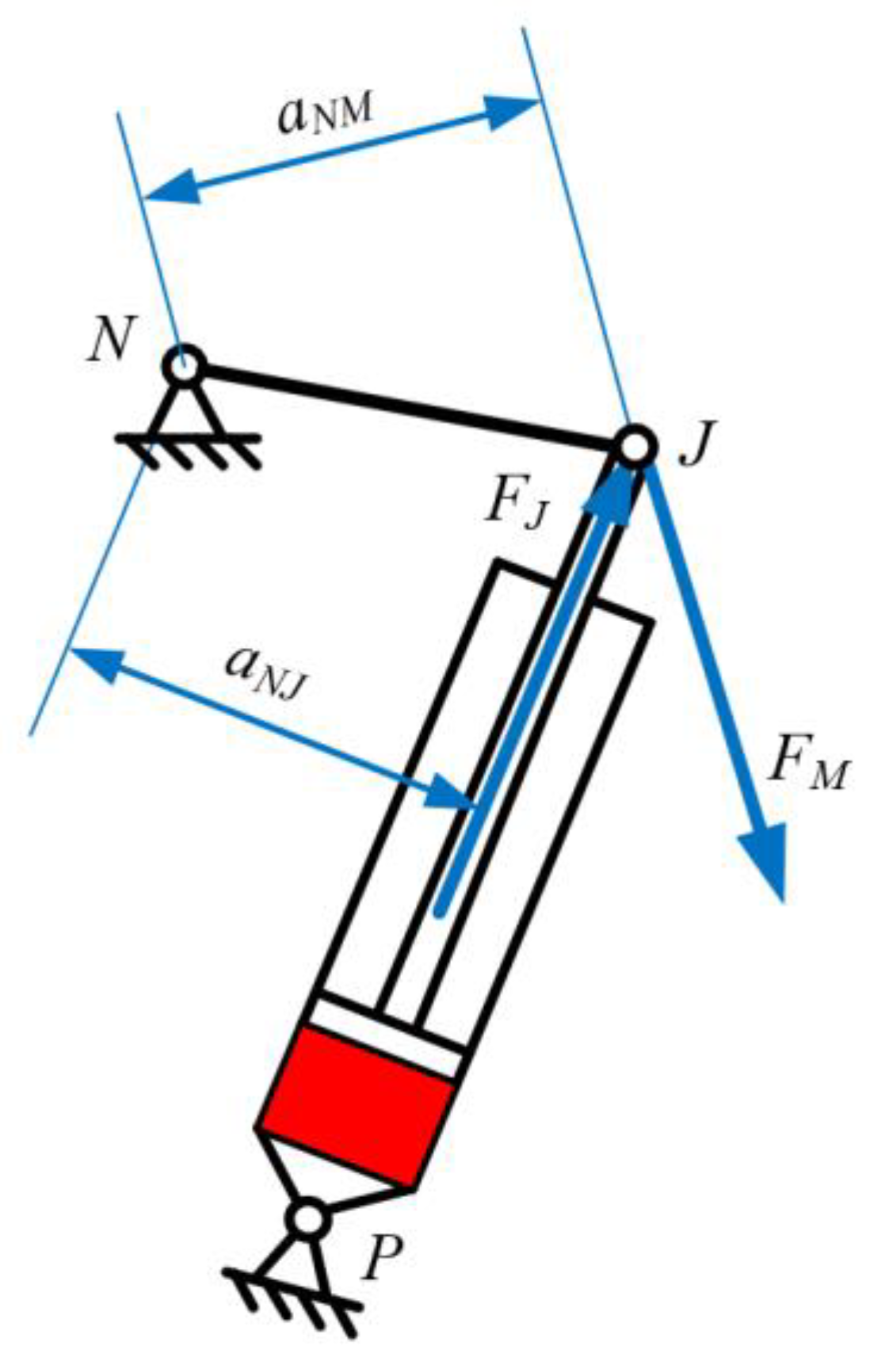
- Force Analysis on Lift Arm
- (4)
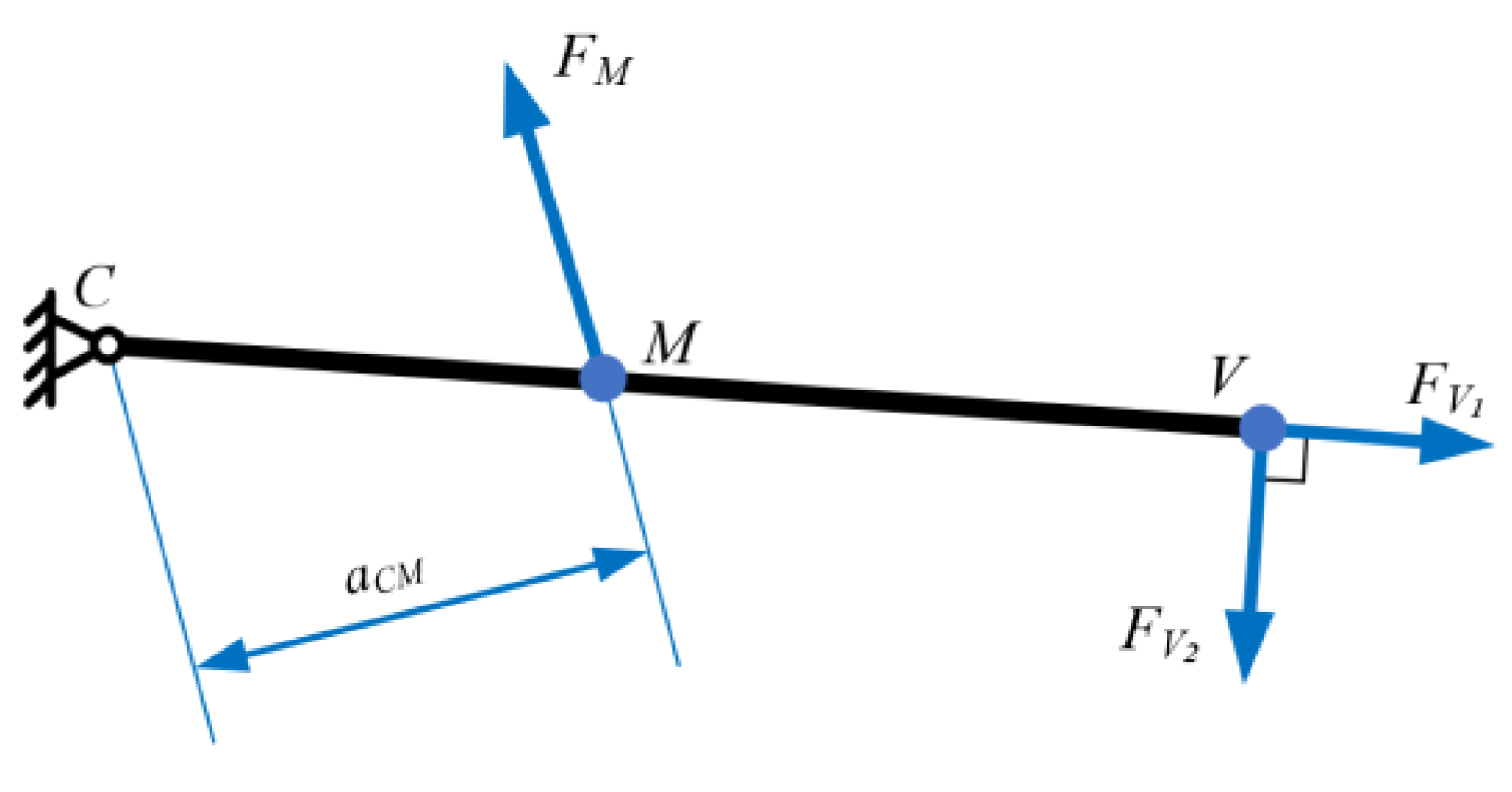
- Individual Force Analysis of the Lower Link CV
- (5)
- Force Analysis of Hitch Implement
2.1.3. Tire–Soil Interaction Model
2.1.4. Traction Performance Model
2.2. Hydraulic Cylinder Pressure Optimization Method
- (1)
- Traction Efficiency: Improving the energy efficiency of tractor traction operations in the field and ensuring the driving range of electric tractors with fixed battery capacity. Optimizing the traction efficiency of electric tractors is crucial for traction operations in the field.
- (2)
- The Wheel Slip: Under field operating conditions, excessive wheel slip of tractor driving wheels can cause serious damage to soil quality, increase tire wear, and result in additional energy loss. Therefore, it is also necessary to reduce the wheel slip of the rear wheels while improving traction efficiency, which can reduce the additional energy loss.
- (3)
- Front and Rear Axle Dynamic Loads and Distribution Ratio: Under field operating conditions, increasing the rear wheel load and reducing the front wheel load are beneficial for improving traction efficiency. However, it is not always better to have a larger rear wheel load. Numerous experimental results have shown that to ensure the safe and stable maneuverability of the tractor, the dynamic load coefficient of the front axle should not be less than 0.2 [29].
2.3. System Validation
2.3.1. MATLAB/Simulink Simulation
2.3.2. Hardware-in-the-Loop (HIL) Simulation Testing
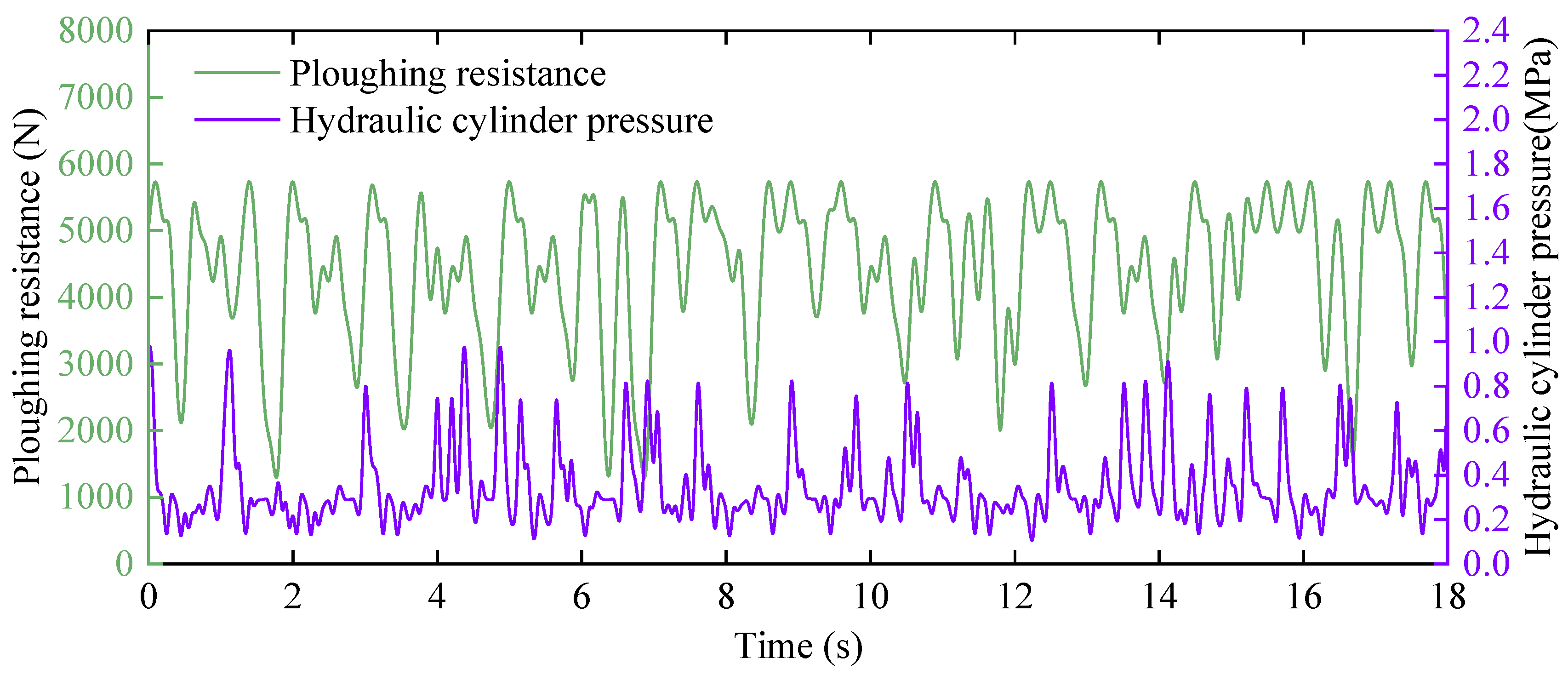
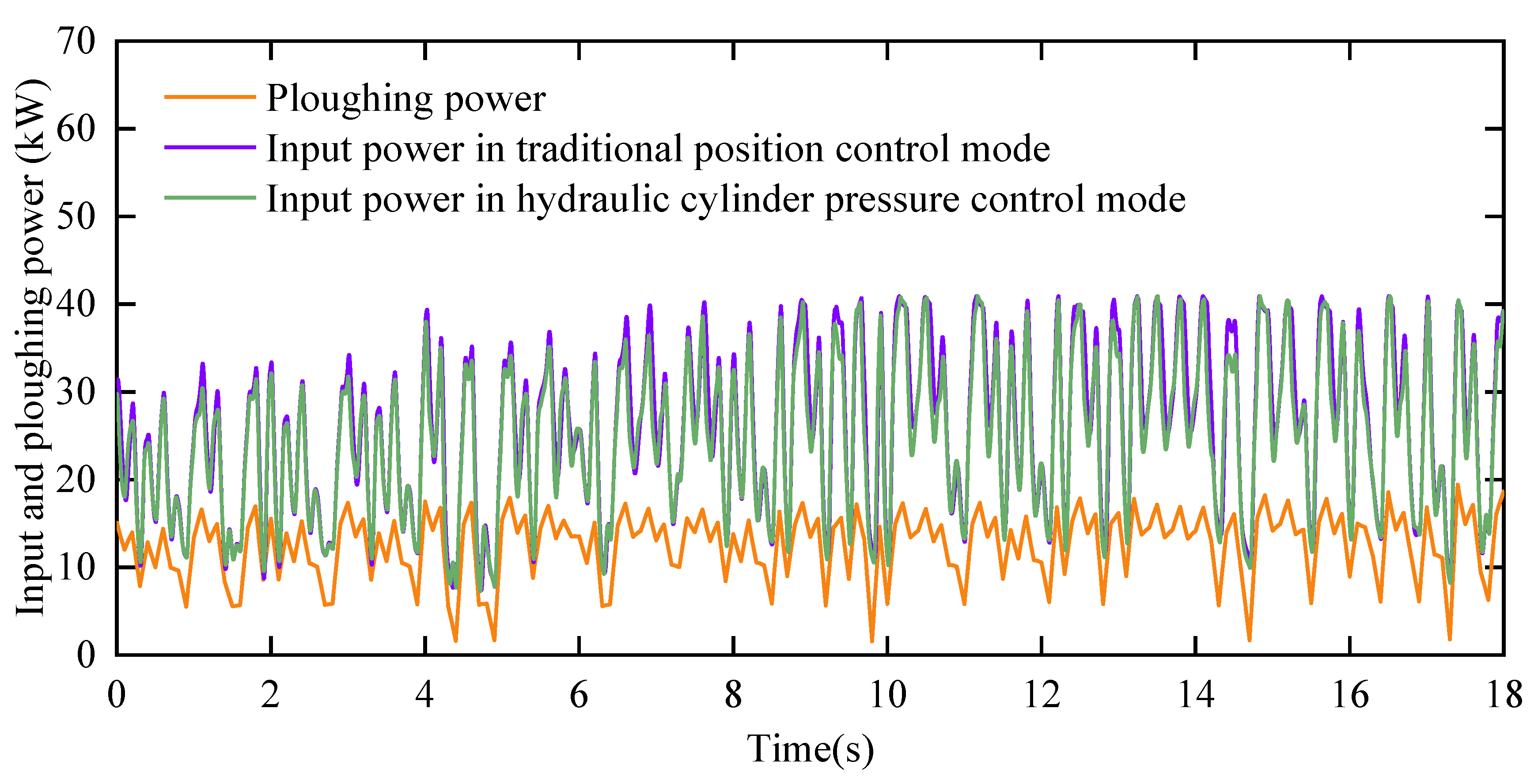
- Traditional position control mode: In this mode, the ploughing depth is controlled at a constant value, the hydraulic cylinder position is locked, and the pressure in the hydraulic cylinder fluctuates with the load within the rated range.
- Hydraulic cylinder pressure control mode: In this mode, the proposed hydraulic cylinder pressure control method is applied to the electro-hydraulic hitch system and constrains the pressure control range to maintain a constant ploughing depth. The control cycle is set to 100 ms.
3. Results and Discussion
4. Conclusions
- (1)
- During the simulation, the hydraulic cylinder pressure was varied to adapt to changes in ploughing resistance. This ensured the working stability of the electric tractor while transferring more load from the depth-limiting wheel to the rear driving wheels, thereby optimizing the traction performance.
- (2)
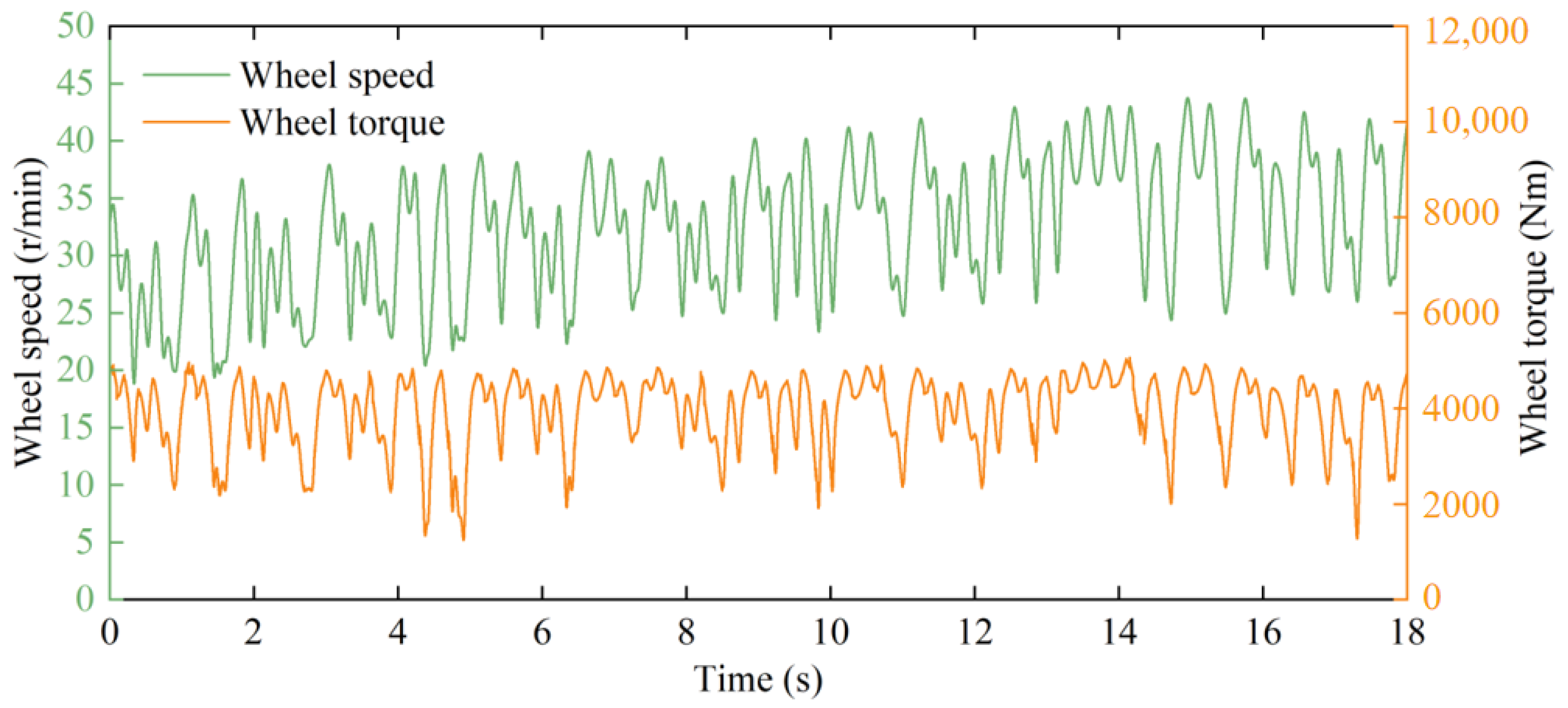
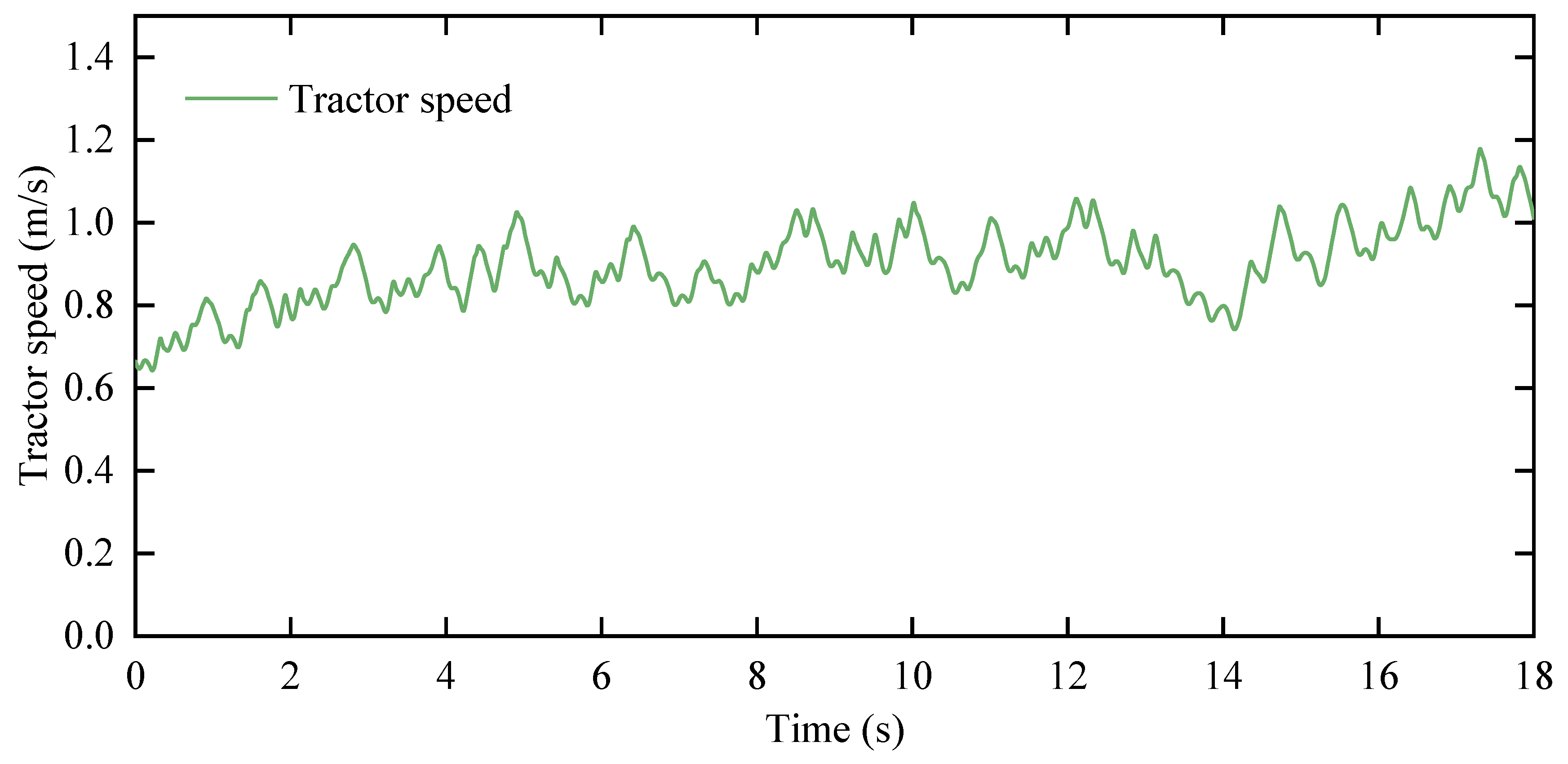
- Under the hydraulic cylinder pressure control mode, the traction efficiency of the electric tractor was increased by 2.42%, and wheel slip in the hydraulic cylinder pressure control mode was reduced by 9.27% compared to the traditional position control mode, improving the traction performance of the electric tractor and achieving more efficient traction operations.
- (3)
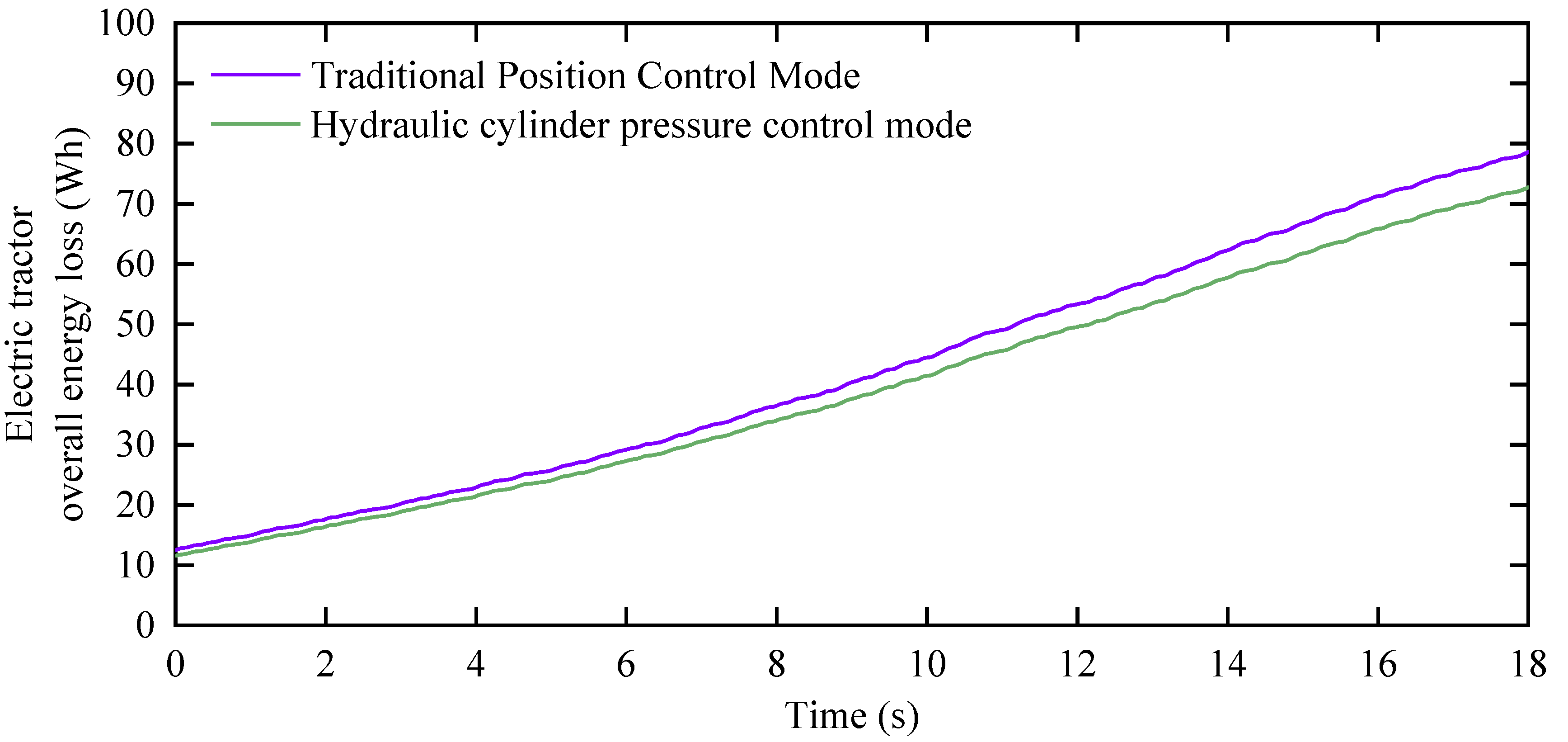
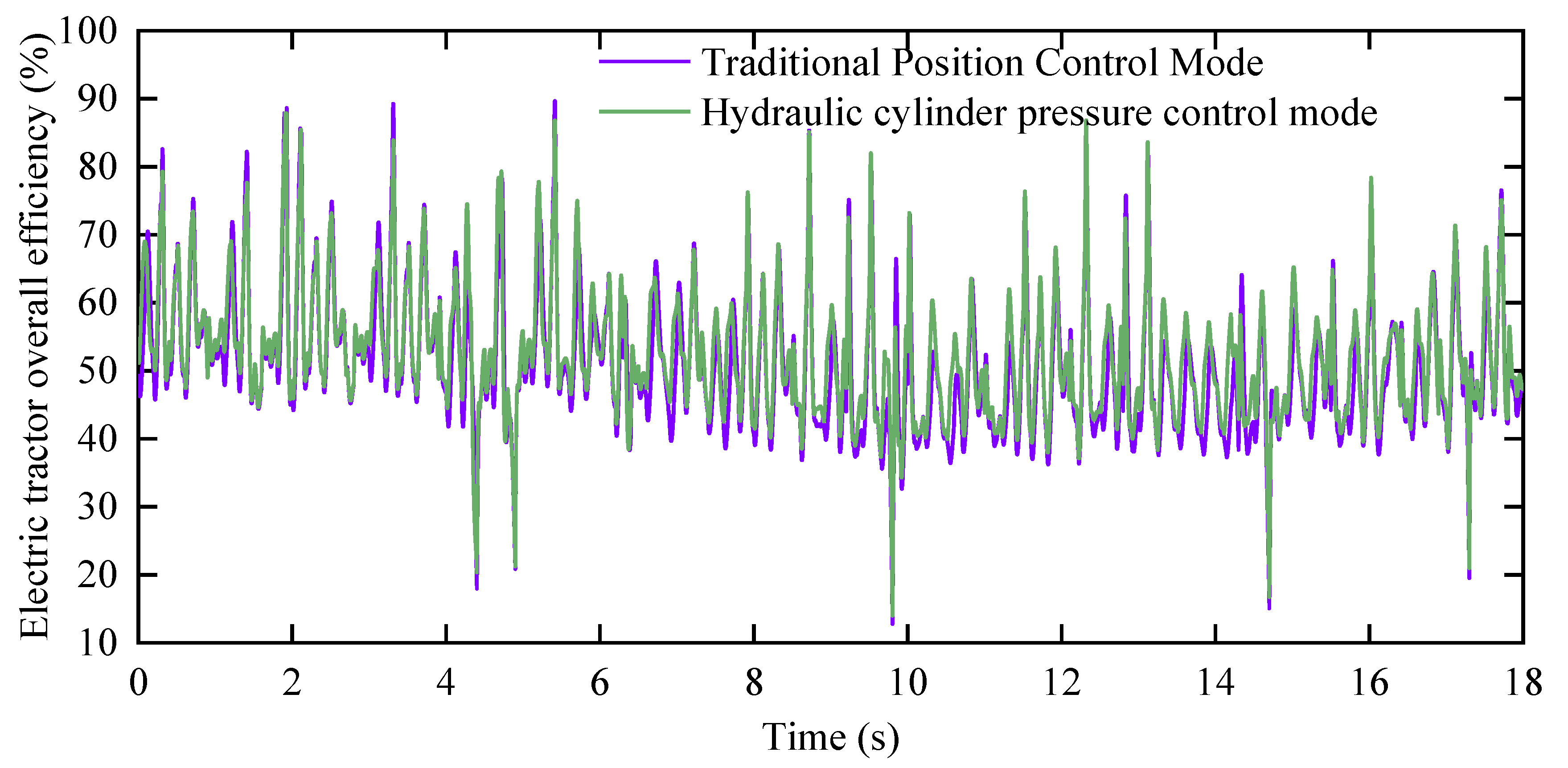
- Under the hydraulic cylinder pressure control mode, the electric tractor overall energy loss was reduced by 7.67% compared to the traditional position control mode, and the electric tractor overall efficiency in the hydraulic cylinder pressure control mode was increased by 3.13%, reducing the electric tractor overall energy loss.
- (4)
- The hydraulic cylinder pressure control method of the electro-hydraulic hitch system proposed in this paper could achieve the purpose of effectively improving traction performance and reducing the electric tractor overall energy loss while maintaining a constant ploughing depth.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lebedevas, S.; Makareviciene, V.; Sendzikiene, E.; Zaglinskis, J. Oxidation stability of biofuel containing Camelina sativa oil methyl esters and its impact on energy and environmental indicators of diesel engine. Energy Convers. Manag. 2013, 65, 33–40. [Google Scholar] [CrossRef]
- Ushakov, S.; Valland, H.; Æsøy, V. Combustion and emissions characteristics of fish oil fuel in a heavy-duty diesel engine. Energy Convers. Manag. 2013, 65, 228–238. [Google Scholar] [CrossRef]
- Labeckas, G.; Slavinskas, S. Comparative performance of direct injection diesel engine operating on ethanol, petrol and rapeseed oil blends. Energy Convers. Manag. 2009, 50, 792–801. [Google Scholar] [CrossRef]
- Anselma, P.G.; Belingardi, G. Fuel cell electrified propulsion systems for long-haul heavy-duty trucks: Present and future cost-oriented sizing. Appl. Energy 2022, 321, 119354. [Google Scholar] [CrossRef]
- Mileusnić, Z.I.; Petrović, D.V.; Đević, M.S. Comparison of tillage systems according to fuel loss. Energy 2010, 35, 221–228. [Google Scholar] [CrossRef]
- Janulevičius, A.; Juostas, A.; Pupinis, G. Tractor’s engine performance and emission characteristics in the process of ploughing. Energy Convers. Manag. 2013, 75, 498–508. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Gilandeh, Y.A.; Gundoshmian, T.M. The effect of the tractor driving system on its performance and fuel loss. Energy 2020, 202, 117803. [Google Scholar] [CrossRef]
- Porteš, P.; Bauer, F.; Čupera, J. Laboratory-experimental verification of calculation of force effects in tractor’s three-point hitch acting on driving wheels. Soil Tillage Res. 2013, 128, 81–90. [Google Scholar] [CrossRef]
- Janulevičius, A.; Damanauskas, V. How to select air pressures in the tires of MFWD (mechanical front-wheel drive) tractor to minimize fuel loss for the case of reasonable wheel slip. Energy 2015, 90, 691–700. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, J.; Xing, Y.; Li, S.; Yi, J.; Zhao, C. Energy Management of Sowing Unit for Extended-Range Electric Tractor Based on Improved CD-CS Fuzzy Rules. Agriculture 2023, 13, 1303. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Chang, M. A Design of an Unmanned Electric Tractor Platform. Agriculture 2022, 12, 112. [Google Scholar] [CrossRef]
- Moreda, G.P.; Muñoz-García, M.A.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Zhang, S.; Wen, C.; Ren, W.; Luo, Z.; Xie, B.; Zhu, Z.; Chen, Z. A joint control method considering travel speed and slip for reducing energy loss of rear wheel independent drive electric tractor in ploughing. Energy 2023, 263, 126008. [Google Scholar] [CrossRef]
- Lagnelöv, O.; Dhillon, S.; Larsson, G.; Nilsson, D.; Larsolle, A.; Hansson, P. Cost analysis of autonomous battery electric field tractors in agriculture. Biosyst. Eng. 2021, 204, 358–376. [Google Scholar] [CrossRef]
- Zhou, D.; Ravey, A.; Al-Durra, A.; Gao, F. A comparative study of extremum seeking methods applied to online energy management strategy of fuel cell hybrid electric vehicles. Energy Convers. Manag. 2017, 151, 778–790. [Google Scholar] [CrossRef]
- Kumar, S.; Noori, M.T.; Pandey, K.P. Performance characteristics of mode of ballast on energy efficiency indices of agricultural tyre in different terrain condition in controlled soil bin environment. Energy 2019, 182, 48–56. [Google Scholar] [CrossRef]
- Pranav, P.K.; Tewari, V.K.; Pandey, K.P.; Jha, K.R. Automatic wheel slip control system in field operations for 2WD tractors. Comput. Electron. Agric. 2012, 84, 1–6. [Google Scholar] [CrossRef]
- Zhang, S.; Du, Y.; Zhu, Z.; Mao, E.; Liu, J.; Shi, J. Integrated control method of traction & slip ratio for rear-driving high-powerm tractors. J. Agric. Eng. 2016, 32, 47–53. [Google Scholar]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. A practical effort to equip tractor-implement with fuzzy depth and draft control system. Eng. Agric. Environ. Food 2019, 12, 191–203. [Google Scholar] [CrossRef]
- Wu, Z.; Xie, B.; Li, Z.; Chi, R.; Ren, Z.; Du, Y.; Inoue, E.; Mitsuoka, M.; Okayasu, T.; Hirai, Y. Modelling and verification of driving torque management for electric tractor: Dual-mode driving intention interpretation with torque demand restriction. Biosyst. Eng. 2019, 182, 65–83. [Google Scholar] [CrossRef]
- Čiplienė, A.; Gurevičius, P.; Janulevičius, A.; Damanauskas, V. Experimental validation of tyre inflation pressure model to reduce fuel loss during soil tillage. Biosyst. Eng. 2019, 186, 45–59. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. Fundamental realization of longitudinal slip efficiency of tractor wheels in a tillage practice. Soil Tillage Res. 2021, 205, 104765. [Google Scholar] [CrossRef]
- Lagnelöv, O.; Larsson, G.; Nilsson, D.; Larsolle, A.; Hansson, P. Performance comparison of charging systems for autonomous electric field tractors using dynamic simulation. Biosyst. Eng. 2020, 194, 121–137. [Google Scholar] [CrossRef]
- Zhang, S.; Xie, B.; Wen, C.; Zhao, Y.; Du, Y.; Zhu, Z.; Song, Z.; Li, L. Intelligent ballast control system with active load-transfer for electric tractors. Biosyst. Eng. 2022, 215, 143–155. [Google Scholar] [CrossRef]
- Ning, P.; Su, K.; Wang, M.; Cui, G.; Li, K.; Cui, Y.; Wang, W. Design and Test of Electric Tractor with Battery Position Longitudinally Adjustable Mechanism. J. Agric. Mech. Res. 2022, 44, 212–218. [Google Scholar] [CrossRef]
- Laceklis-Bertmanis, J.; Repsa, E.; Kronbergs, E. Investigation of pressure oscillation in hydraulic hitch-system, Engineering for Rural Development. In Proceedings of the 9th International Scientific Conference on Engineering for Rural Development, Jelgava, Latvia, 27–28 May 2010. [Google Scholar]
- Liu, C.; Zhao, J.; Gu, J.; Du, Y.; Li, Z.; Zhu, Z.; Mao, E. Pressure Control Algorithm Based on Adaptive Fuzzy PID with Compensation Correction for the Tractor Electronic Hydraulic Hitch. Appl. Sci. 2020, 10, 3179. [Google Scholar] [CrossRef]
- Moitzi, G.; Haas, M.; Wagentristl, H.; Boxberger, J.; Gronauer, A. Energy loss in cultivating and ploughing with traction improvement system and consideration of the rear furrow wheel-load in ploughing. Soil Tillage Res. 2013, 134, 56–60. [Google Scholar] [CrossRef]
- Habarta, F. Determination in relation to safety of operation of the minimal load on the front steering axle of a tractor with implements attached. J. Agric. Eng. Res. 1971, 16, 126–140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (kg) | 1260 | (m) | 0.43 |
| (kg) | 120 | (m) | 0.46 |
| (kg·s−2) | 9.8 | (m) | 0.60 |
| (m) | 0.88 | (m) | 0.1 |
| (m) | 0.54 | (m) | 1.50 |
| (m) | 1.42 | (m) | 1.38 |
| (m) | 0.12 | (m) | 0.97 |
| (m) | 0.22 | (m) | 0.77 |
| (m) | 0.25 | (kPa) | 1300 |
| Input Power (kW) | ||
|---|---|---|
| Traditional Position Control Mode | Hydraulic Cylinder Pressure Control Mode | |
| Mean | 25.77 | 24.81 |
| STD | 9.11 | 8.46 |
| Min | 7.40 | 7.27 |
| Max | 40.90 | 40.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Z.; Wang, J.; Wu, J.; Zhang, S.; Chen, Z.; Xie, B. Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors. Agriculture 2023, 13, 1555. https://doi.org/10.3390/agriculture13081555
Luo Z, Wang J, Wu J, Zhang S, Chen Z, Xie B. Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors. Agriculture. 2023; 13(8):1555. https://doi.org/10.3390/agriculture13081555
Chicago/Turabian StyleLuo, Zhenhao, Jihang Wang, Jing Wu, Shengli Zhang, Zhongju Chen, and Bin Xie. 2023. "Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors" Agriculture 13, no. 8: 1555. https://doi.org/10.3390/agriculture13081555
APA StyleLuo, Z., Wang, J., Wu, J., Zhang, S., Chen, Z., & Xie, B. (2023). Research on a Hydraulic Cylinder Pressure Control Method for Efficient Traction Operation in Electro-Hydraulic Hitch System of Electric Tractors. Agriculture, 13(8), 1555. https://doi.org/10.3390/agriculture13081555