



Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID

Abstract
:1. Introduction
2. Design of the Solid-Fertilizer-Dissolving Control System
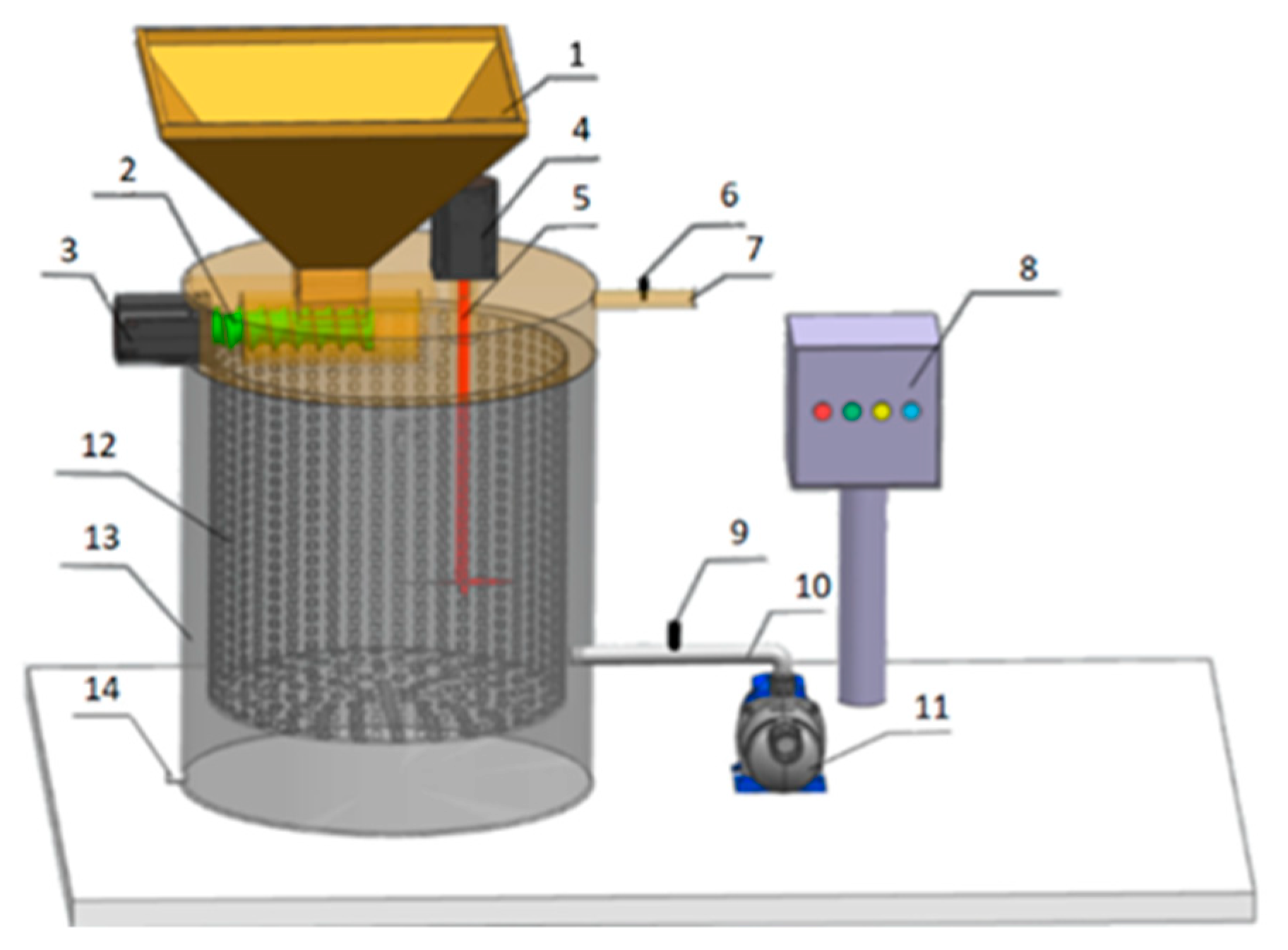
2.1. Structure and Working Principle of the Solid-Fertilizer-Dissolving Device
2.2. Design of the Control System
2.2.1. Design of the Hardware System
2.2.2. System Software Design
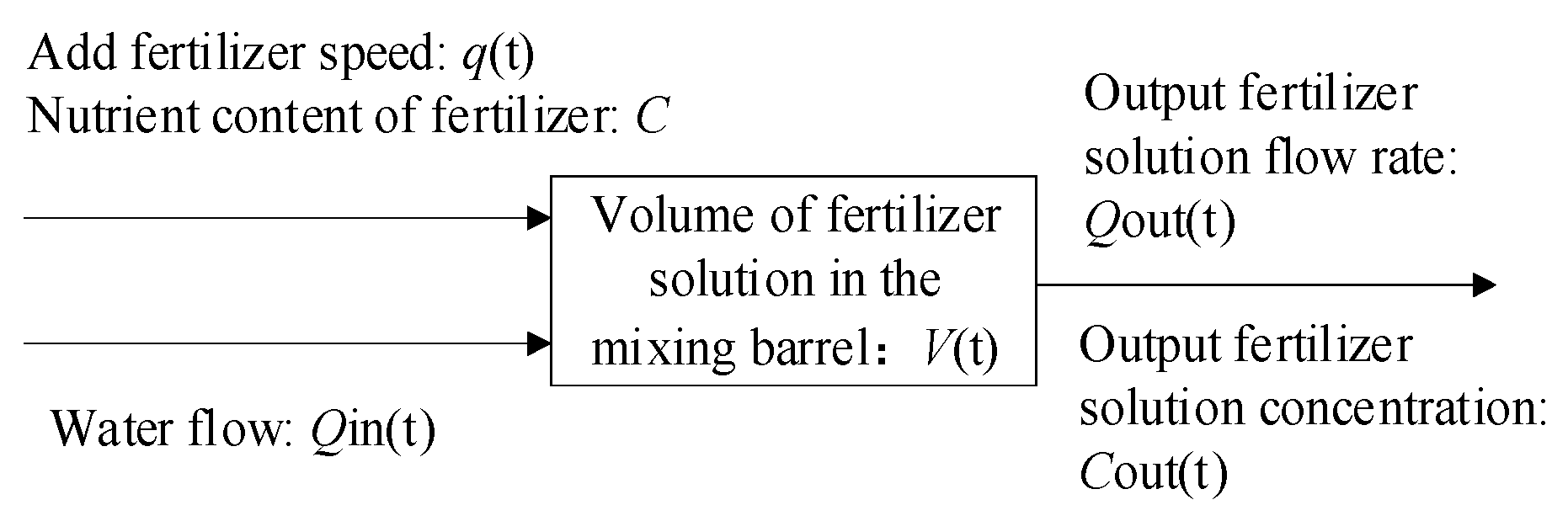
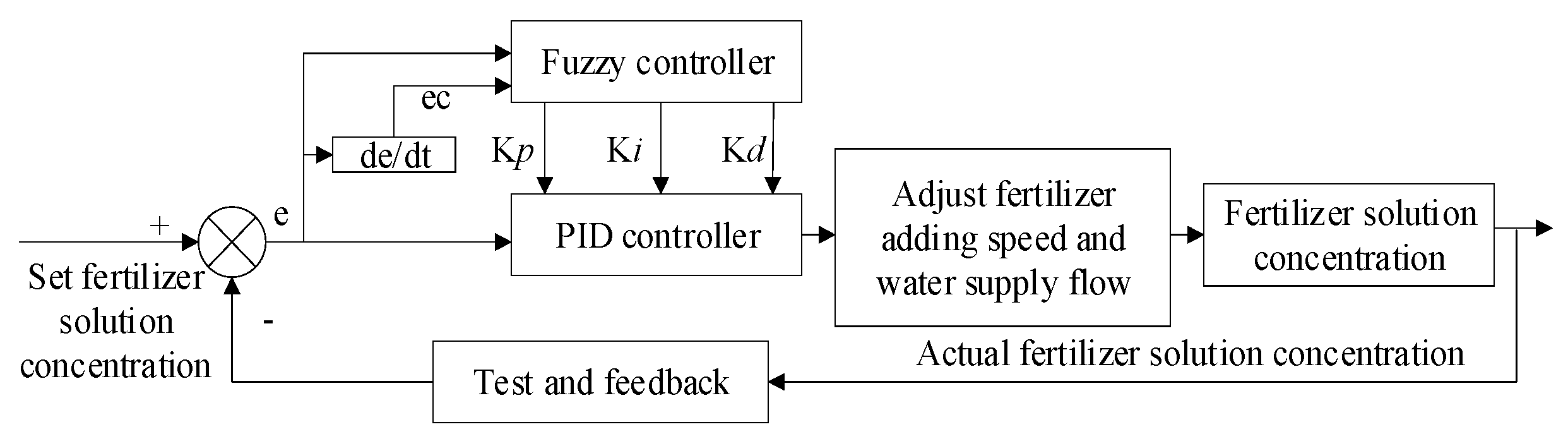
2.2.3. Design of the Closed-Loop Feedback System Based on Fuzzy PID
- Position PID control algorithmAt extremely small sampling periods, multiple sampling time points kT were set to replace the continuous time t. The sum of the deviation of all time points was replaced by integration, and the deviation increment of adjacent time points was replaced by differentiation. The results can be obtained using Equations (7) and (8):where T is the sampling period and k represents the sampling serial number.Substituting Equations (7) and (8) into Equation (5) yields the position PID control algorithm formula:
- Incremental PID control algorithmThe incremental PID only outputs the incremental ∆U(k) of the control quantity. The output expression of (k − 1) times can be obtained from Equation (9):
3. Test Scheme and Methods
3.1. Calibration Testing of the Fertilizer Addition Rate
3.2. Calibration Testing of the Water Flow Rate
3.3. Calibration Testing of the Relationship between the Concentration and Conductivity of the Fertilizer Solution
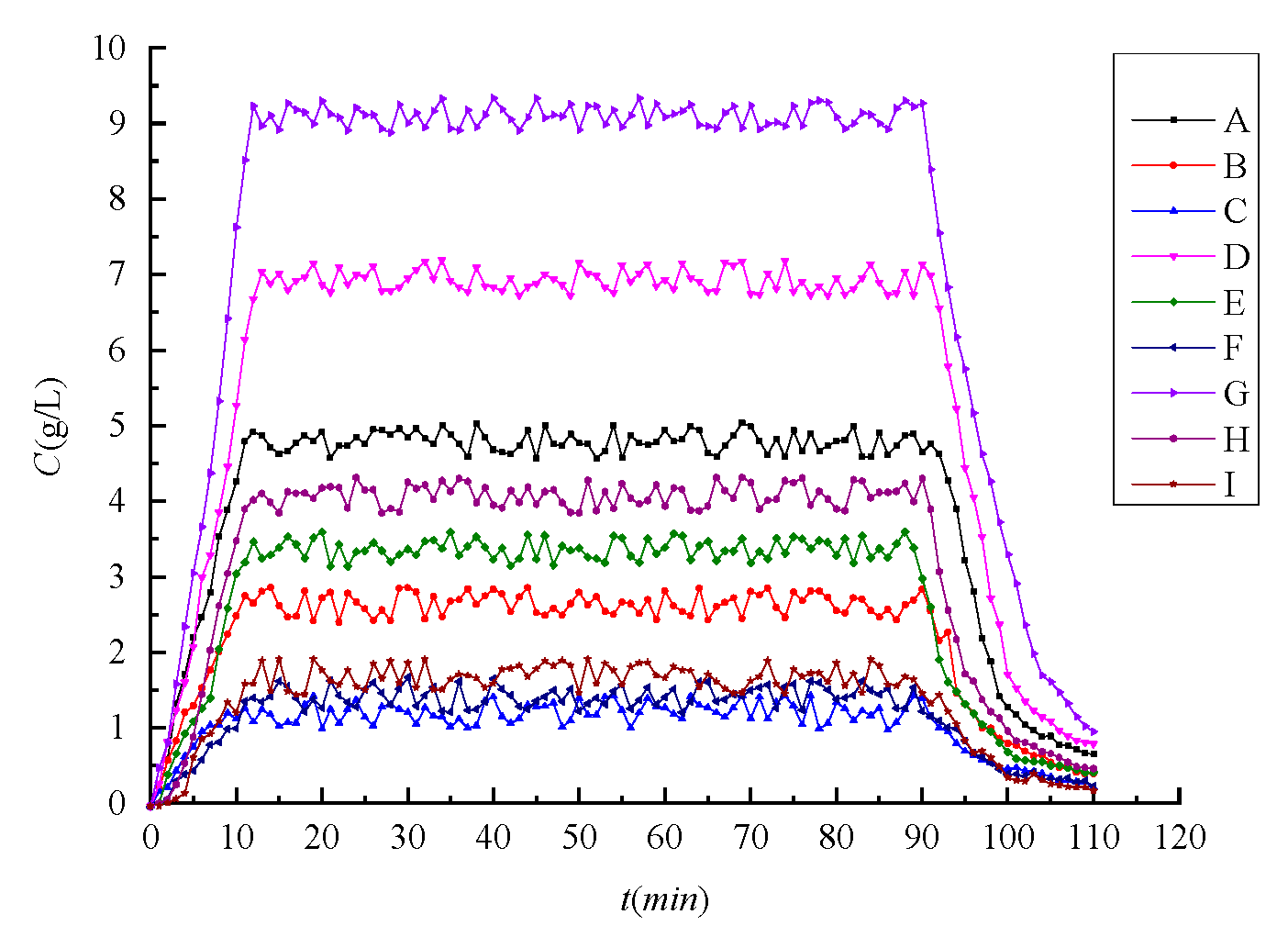
3.4. Effects of the Fertilizer Flow Rate and Water Flow Rate on the Fertilizer Solution Concentration
3.5. Control System Performance Testing
4. Results and Analysis
4.1. Relationship between Fertilizer Flow Rate and PWM Wave Frequency
4.2. Relationship between Water Flow Rate and PWM Duty Cycle
4.3. Relationship between the Concentration of Fertilizer Solution and Electrical Conductivity
4.4. Influence of the Control System on Fertilizer Solution Concentration
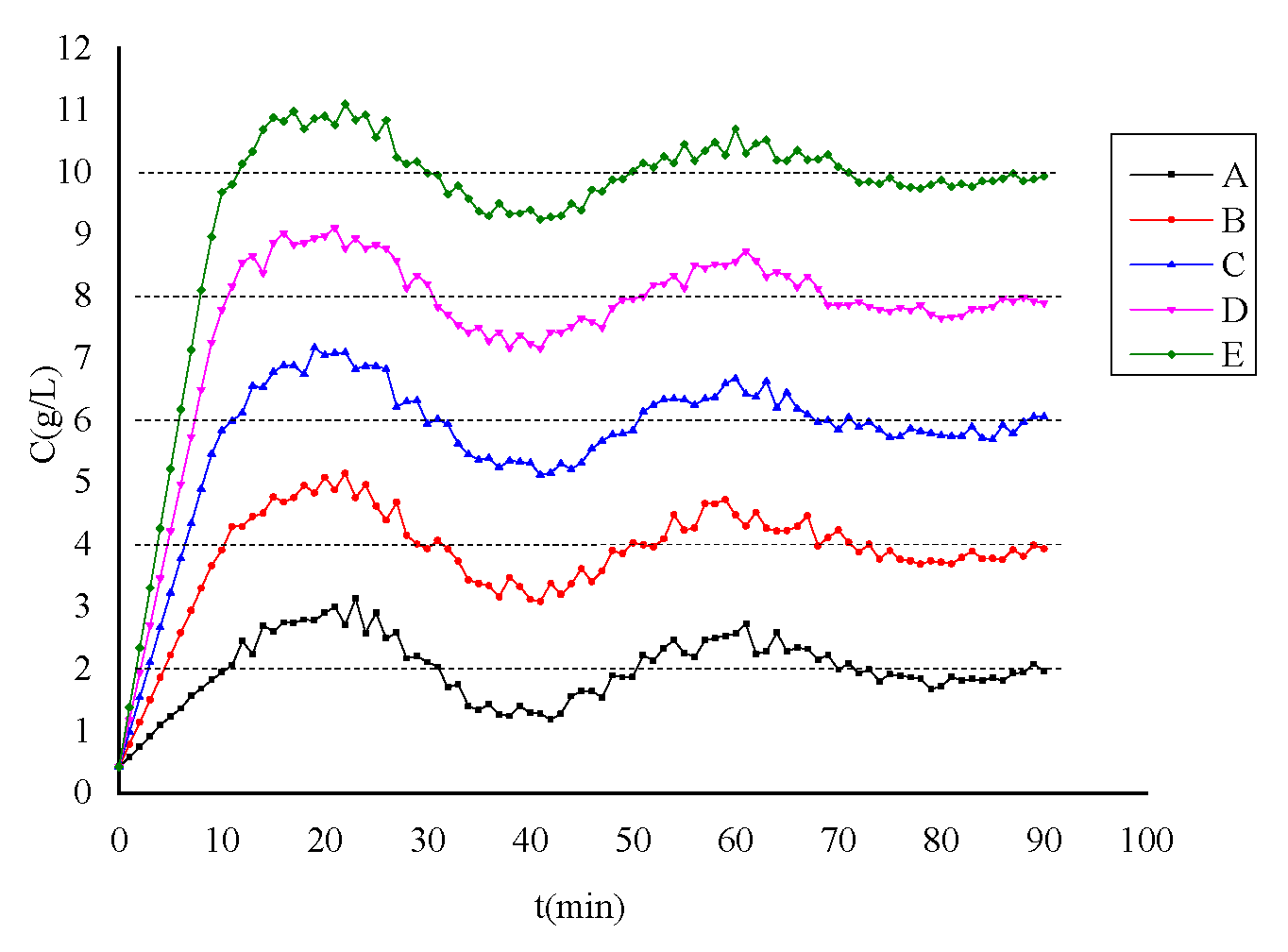
4.5. Control System Performance
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, P.; Li, H.; Issaka, Z.; Chen, C. Effect of manifold layout and fertilizer solution concentration on fertilization and flushing times and uniformity of drip irrigation systems. Agric. Water Manag. 2018, 200, 71–79. [Google Scholar] [CrossRef]
- Sharmasarkar, F.C.; Sharmasarkar, S.; Miller, S.D.; Vance, G.F.; Zhang, R. Assessment of drip and flood irrigation on water and fertilizer use efficiencies for sugarbeets. Agric. Water Manag. 2001, 46, 241–251. [Google Scholar] [CrossRef]
- Wu, H.; Yue, Q.; Guo, P.; Xu, X.; Huang, X. Improving the AquaCrop model to achieve direct simulation of evapotranspiration under nitrogen stress and joint simulation-optimization of irrigation and fertilizer schedules. Agric. Water Manag. 2022, 266, 107599. [Google Scholar] [CrossRef]
- Jovarauskas, D.; Steponavičius, D.; Kemzūraitė, A.; Zinkevičius, R.; Venslauskas, K. Comparative analysis of the environmental impact of conventional and precision spring wheat fertilization under various meteorological conditions. J. Environ. Manag. 2021, 296, 113150. [Google Scholar] [CrossRef]
- Kumar, M.; Kumar, R. Hydraulics of water and nutrient application through drip irrigation-A review. J. Soil Water Conserv. 2018, 17, 65. [Google Scholar] [CrossRef]
- Silva, S.; Duarte, D.; Valente, A.; Soares, S.; Soares, J.; Pinto, F.C. Augmented Intelligent Distributed Sensing System Model for Precision Agriculture. In Proceedings of the 2021 Telecoms Conference (ConfTELE)., Leiria, Portugal, 11–12 February 2021. [Google Scholar]
- Nesthad, N.; Kurien, E.K.; Varughese, A.; Mathew, E.K. Evaluation of different fertigation equipments and the hydraulic performance of the drip fertigation system. J. Agric. Sci. 2013, 1, 12–17. [Google Scholar]
- Leedy, C.T.; Leedy, M.L. Fertilizer Mixing Device for Sprinkler Systems. U.S. Patent US20020145057A1, 10 October 2002. [Google Scholar]
- Zhang, X.; Mao, H.; Gao, H.; Zuo, Z.; Zhang, Y. Multi-Scale Habitat Information-Based Method and Device for Detecting and Controlling Water and Fertilizer for Crops in Seedling Stage. U.S. Patent US20210289692A1, 23 September 2021. [Google Scholar]
- Yang, L.; Wu, G.; Wu, Z.; Li, T.; Mao, C. Fertilization Precision Control Method for Water and Fertilizer Integrated Equipment and Control System Thereof. U.S. Patent US10918014B2, 17 January 2019. [Google Scholar]
- Anthony, B.C.; Johnson, D.N.; Igancio, C. A Device for Injecting and Mixing Liquid Fertilizer with Water Flow in a Sprinkler System Pipeline. WO WO2007021512A2, 22 February 2007. [Google Scholar]
- Wang, H.; Fu, Q.; Meng, F.; Mei, S.; Wang, J.; Li, L. Optimal design and experiment of fertilizer EC regulation based on subsection control algorithm of fuzzy and PI. Trans. Chin. Soc. Agric. Eng. 2016, 32, 110–116. [Google Scholar]
- Bi, P.; Zheng, J. Study on Application of Grey Prediction Fuzzy PID Control in Water and Fertilizer Precision Irrigation. In Proceedings of the IEEE International Conference on Computer & Information Technology, Xi’an, China, 11–13 September 2014; pp. 789–791. [Google Scholar]
- Wang, J.; Wang, S.; Chen, J.; Liu, H.; Xu, D. Research on Automatic Irrigation Algorithm of Strawberry Greenhouse Based on PLC. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Beijing, China, 18–20 September 2013. [Google Scholar]
- Zhang, J.; Zhang, W.; Zhang, F.; Zhang, J.; Zhang, J. Research of adaptive nonlinear model by integrated irrigation of water and soils in greenhouse for environment and ecological balance. IOP Conf. Ser. Earth Environ. Sci. 2021, 804, 042087. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, Q.; Liu, F.; Li, J.; Cao, N.; Song, C. The Construction of the Integration of Water and Fertilizer Smart Water Saving Irrigation System Based on Big Data. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017. [Google Scholar]
- Sun, F.; Ma, W.; Li, H.; Wang, S. Research on Water-Fertilizer Integrated Technology Based On Neural Network Prediction and Fuzzy Control. IOP Conf. Ser. Earth Environ. Sci. 2018, 170, 032168. [Google Scholar] [CrossRef]
- Aguilar, J.V.; Langarita, P.; Rodellar, J.; Linares, L.; Horvath, K. Predictive control of irrigation canals—Robust design and real-time implementation. Water Resour. Manag. 2016, 30, 3829–3843. [Google Scholar] [CrossRef]
- Lacasta, A.; Morales-Hernández, M.; Brufau, P.; García-Navarro, P. Simulation of PID Control Applied to Irrigation Channels. Procedia Eng. 2014, 70, 978–987. [Google Scholar] [CrossRef]
- Fernández-Ramos, J.; Narvarte, L.; López-Soria, R.; Almeida, R.H.; Carrêlo, I.B. An assessment of the proportional-integral control tuning rules applied to Photovoltaic Irrigation Systems based on Standard Frequency Converters. Sol. Energy 2019, 191, 468–480. [Google Scholar] [CrossRef]
- Jaiswal, S.; Ballal, M.S. Fuzzy inference based irrigation controller for agricultural demand side management. Comput. Electron. Agric. 2020, 175, 105537. [Google Scholar] [CrossRef]
- Benyezza, H.; Bouhedda, M.; Rebouh, S. Zoning irrigation smart system based on fuzzy control technology and IoT for water and energy saving. J. Clean. Prod. 2021, 302, 127001. [Google Scholar] [CrossRef]
- Shan, Y.; Zhang, L.; Ma, X.; Hu, X.; Hu, Z.; Li, H.; Du, C.; Meng, Z. Application of the Modified Fuzzy-PID-Smith Predictive Compensation Algorithm in a pH-Controlled Liquid Fertilizer System. Processes 2021, 9, 1506. [Google Scholar] [CrossRef]
- Qu, X.; Liu, S.; Fu, S.; He, H.; Hu, Y.; Xiao, L. Design and Implementation of Wireless Environment Monitoring System Based on STM32. Sci. Program. 2021, 2021, 6070664. [Google Scholar]
- Abebe, R.; Vakil, G.; Lo Calzo, G.; Cox, T.; Lambert, S.; Johnson, M.; Gerada, C.; Mecrow, B. Integrated motor drives: State of the art and future trends. IET Electr. Power Appl. 2016, 10, 757–771. [Google Scholar] [CrossRef]
- Alonso-Hernández, O.; Ramos-Fernández, J.C.; Márquez-Vera, M.A.; López-Morales, V.; Ruiz-Vanoye, J.A.; Suárez-Cansino, J.; Trejo-Macotela, F.R. Fuzzy infrared sensor for liquid level measurement: A multi-model approach. Flow Meas. Instrum. 2020, 72, 101696. [Google Scholar] [CrossRef]
- Magzoub, M.A.; Alquthami, T. Optimal Design of Automatic Generation Control Based on Simulated Annealing in Interconnected Two-Area Power System Using Hybrid PID—Fuzzy Control. Energies 2022, 15, 1540. [Google Scholar] [CrossRef]
- Carlucho, I.; De Paula, M.; Villar, S.A.; Acosta, G.G. Incremental Q-learning strategy for adaptive PID control of mobile robots. Expert Syst. Appl. 2017, 80, 183–199. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, C.; Li, H.; Xia, H. Design, Development, and Performance Evaluation of a Fertigation Device for Distributing Solid Fertilizer. Water 2020, 12, 2621. [Google Scholar] [CrossRef]
- McGaghie, W.C.; Crandall, S. Data analysis and statistics. Acad. Med. 2001, 76, 936–938. [Google Scholar] [CrossRef]
- Saoudi, O.; Ghaouar, N.; Othman, T. Conductivity measurements of laccase for various concentrations, pH and ionic liquid solutions. Fluid Phase Equilibria 2017, 433, 184–192. [Google Scholar] [CrossRef]
- Mirzakhaninafchi, H.; Singh, M.; Bector, V.; Gupta, O.P.; Singh, R. Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer. Sustainability 2021, 13, 8694. [Google Scholar] [CrossRef]
- Joseph, C.; Thirunavuakkarasu, I.; Bhaskar, A.; Penujuru, A. Automated fertigation system for efficient utilization of fertilizer and water. In Proceedings of the 2017 9th International Conference on Information Technology and Electrical Engineering (ICITEE), Phuket, Thailand, 12–13 October 2017. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | A | B | C | D | E | F | G | H | I |
|---|---|---|---|---|---|---|---|---|---|
| Water flow rate/m3 h−1 | 1.5 | 1.5 | 1.5 | 1.0 | 1.0 | 1.0 | 0.5 | 0.5 | 0.5 |
| Fertilizer flow rate/kg min−1 | 0.26 | 0.13 | 0.07 | 0.26 | 0.13 | 0.07 | 0.26 | 0.13 | 0.07 |
| Fertilizer Solution Concentration (g/L) | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| EC of K2O (mS/cm) | 0.6 | 34.42 | 46.67 | 68.27 | 90.12 | 111.3 | 131.02 | 151.18 | 171.7 | 189.49 | 207.2 |
| EC of N-P2O5-K2O (mS/cm) | 0.58 | 14.14 | 25.13 | 35.34 | 43.1 | 62.83 | 59.1 | 68.06 | 77.61 | 95.78 | 115.89 |
| Different Patterns | A | B | C | D | E | F | G | H | I |
|---|---|---|---|---|---|---|---|---|---|
| Fertilizer solution concentration at stabilization/(g/L) | 4.78 | 2.64 | 1.21 | 6.89 | 3.36 | 1.41 | 9.08 | 4.07 | 1.68 |
| The average concentration of the fertilizer solution/(g/L) | 4.01 | 2.21 | 1.03 | 5.70 | 2.71 | 1.17 | 7.53 | 3.30 | 1.37 |
| Coefficient of evenness of fertilization/(%) | 71.10 | 71.36 | 74.58 | 68.66 | 65.13 | 69.18 | 69.72 | 65.71 | 66.96 |
| Different Patterns | A | B | C | D | E |
|---|---|---|---|---|---|
| The set value/(g⋅L−1) | 2 | 4 | 6 | 8 | 10 |
| Average fertilizer solution concentration/(g⋅L−1) | 1.92 | 3.82 | 5.72 | 7.63 | 9.52 |
| Stability: adjust the time/min | 20.16 | 20.23 | 20.31 | 20.46 | 20.57 |
| Speed: the response time/min | 10.63 | 10.71 | 10.89 | 10.91 | 10.98 |
| Accuracy: the steady-state error/(g⋅L−1) | 0.55 | 0.53 | 0.57 | 0.54 | 0.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, X.; Li, H.; Chen, C.; Xia, H.; Zhang, Z.; Tang, P. Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID. Agriculture 2022, 12, 1382. https://doi.org/10.3390/agriculture12091382
Song X, Li H, Chen C, Xia H, Zhang Z, Tang P. Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID. Agriculture. 2022; 12(9):1382. https://doi.org/10.3390/agriculture12091382
Chicago/Turabian StyleSong, Xiuhua, Hong Li, Chao Chen, Huameng Xia, Zhiyang Zhang, and Pan Tang. 2022. "Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID" Agriculture 12, no. 9: 1382. https://doi.org/10.3390/agriculture12091382
APA StyleSong, X., Li, H., Chen, C., Xia, H., Zhang, Z., & Tang, P. (2022). Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID. Agriculture, 12(9), 1382. https://doi.org/10.3390/agriculture12091382