
Preliminary Evaluation of Spraying Quality of Multi-Unmanned Aerial Vehicle (UAV) Close Formation Spraying




Abstract
:1. Introduction
2. Materials and Methods
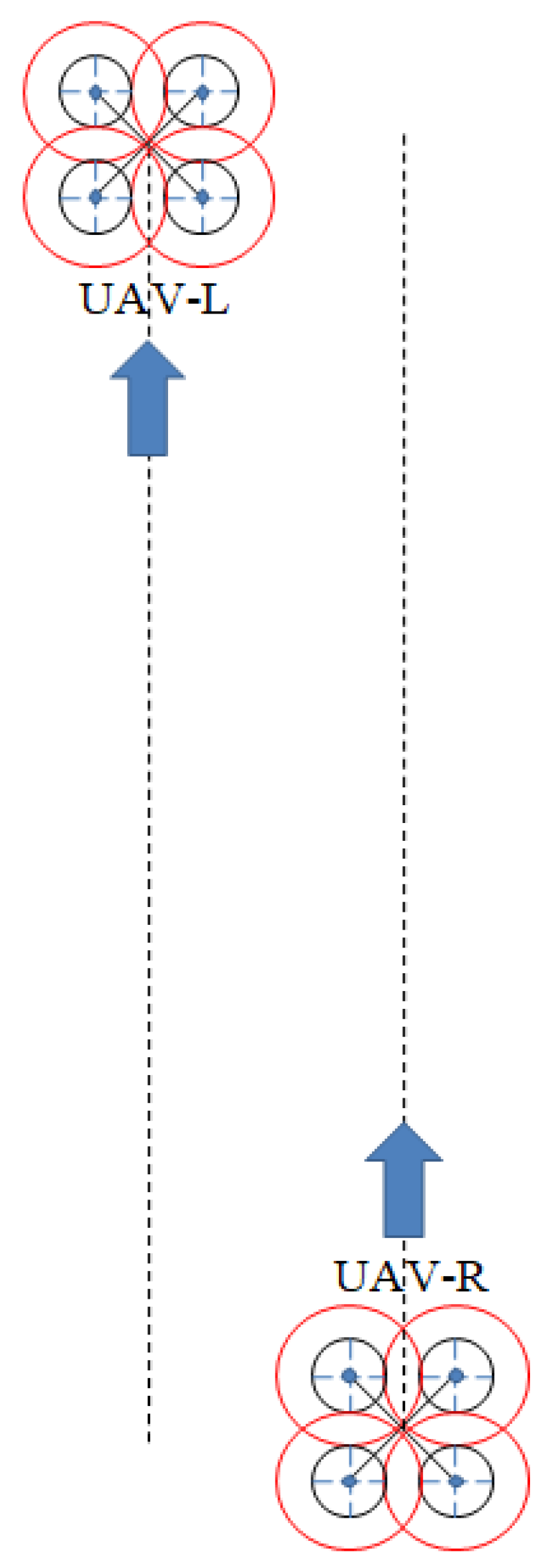
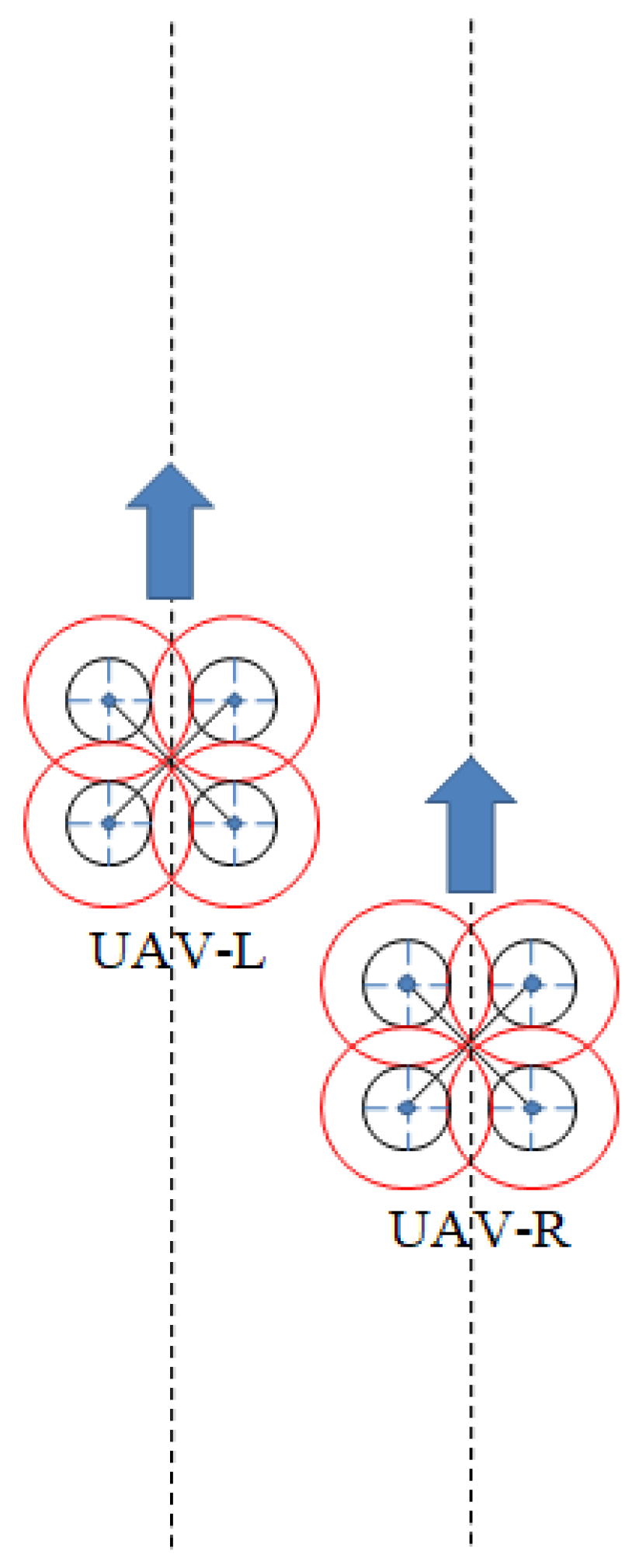
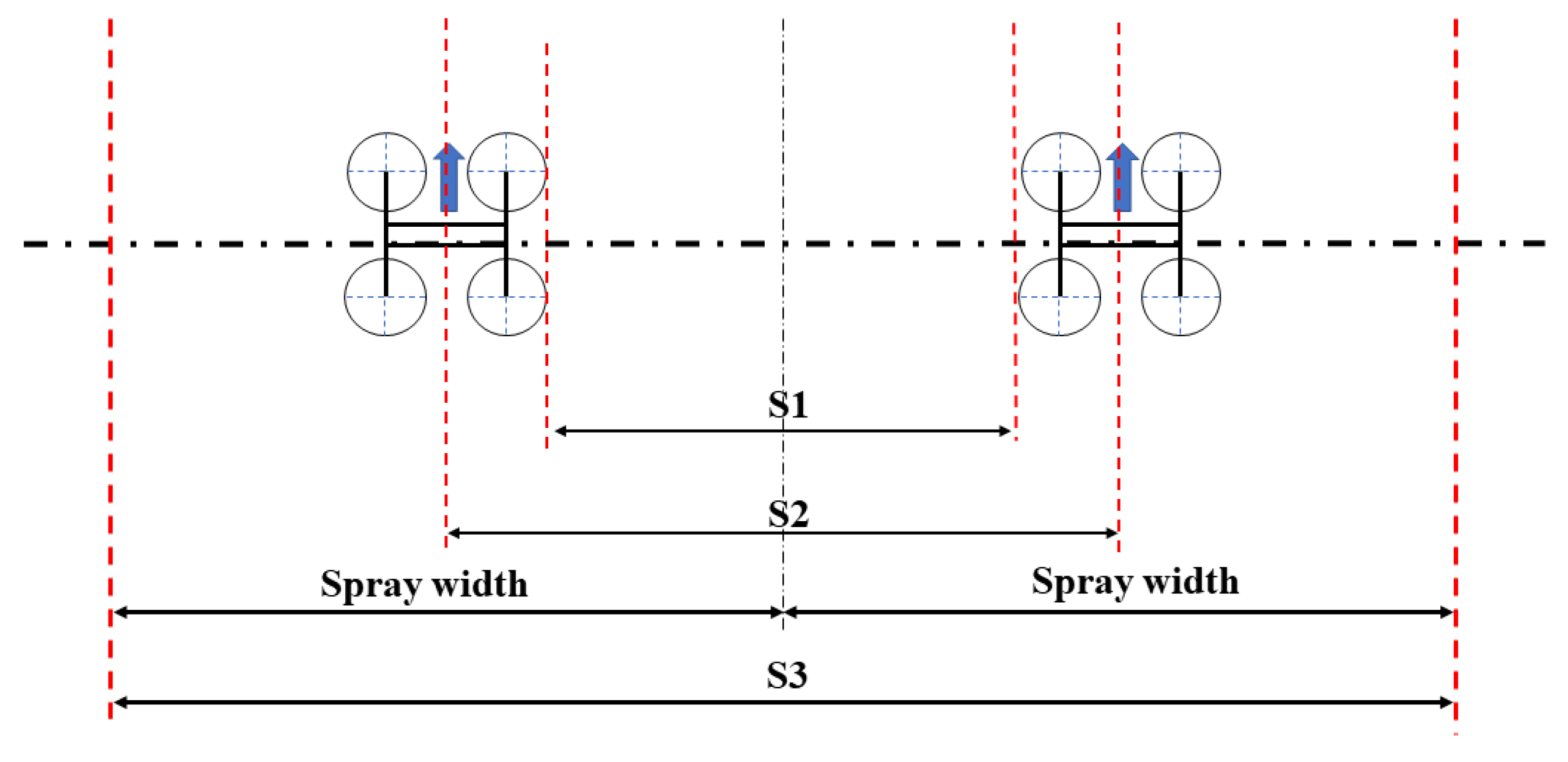
2.1. Multi-UAV Formation Spray Analysis
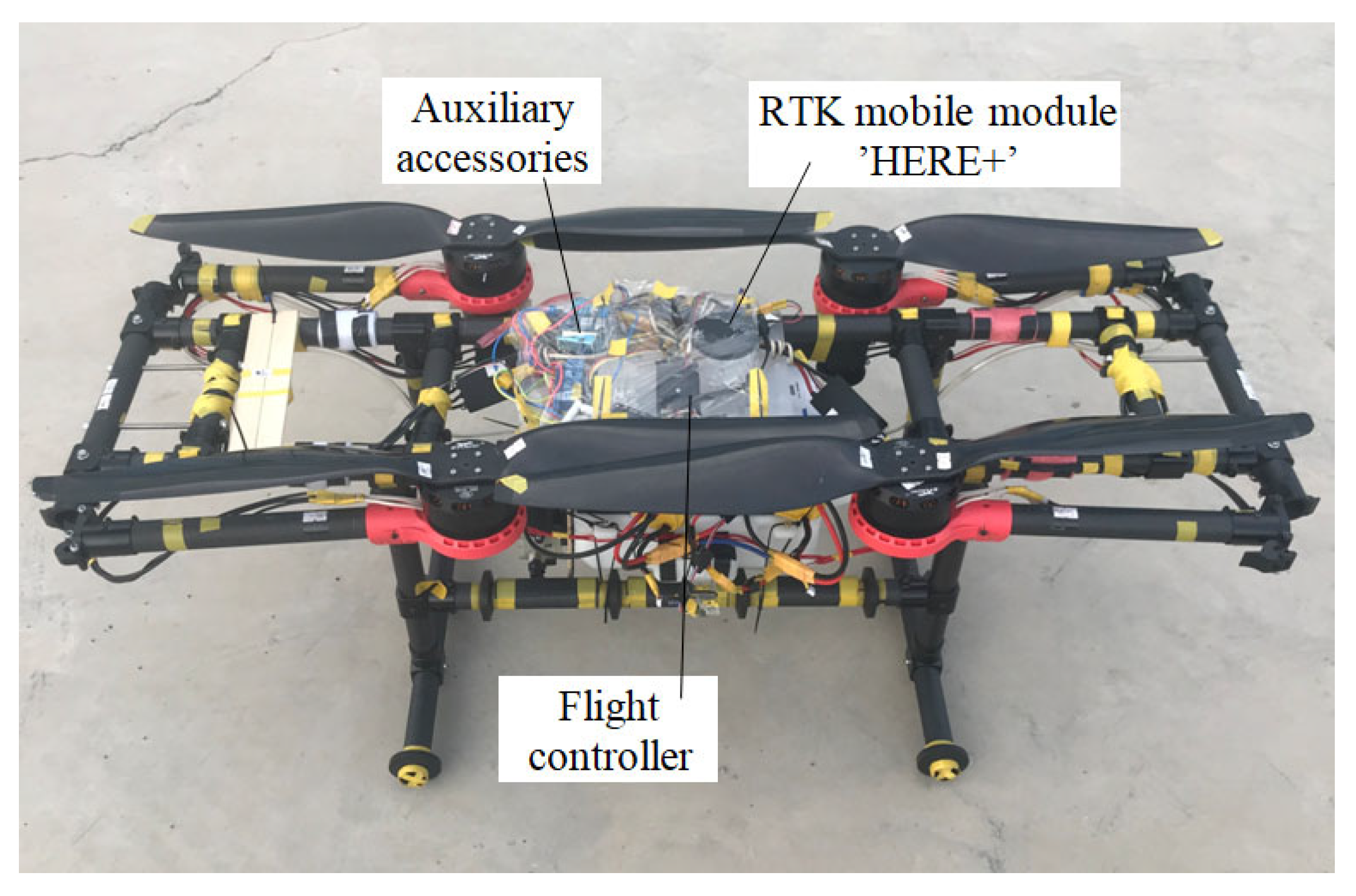
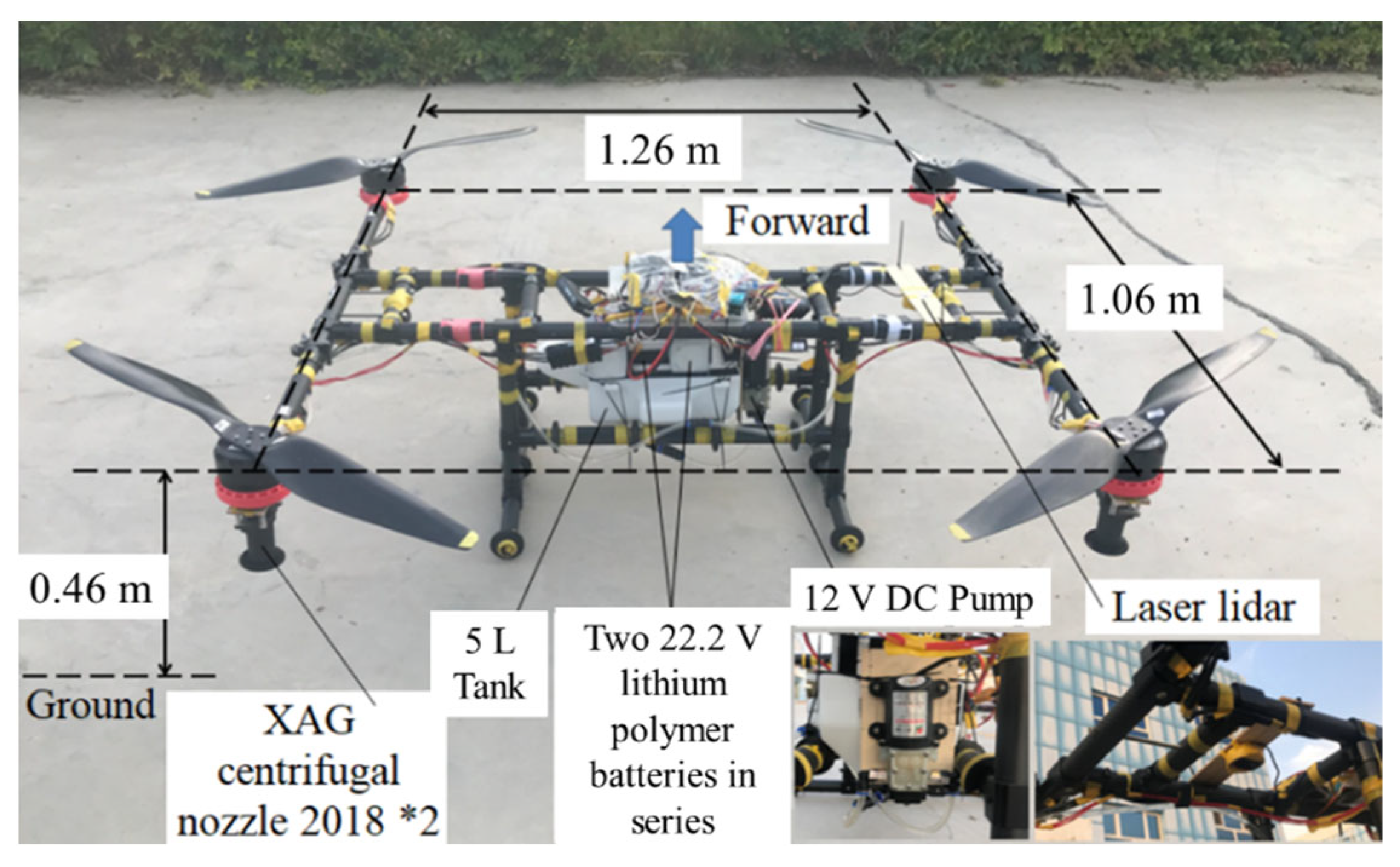
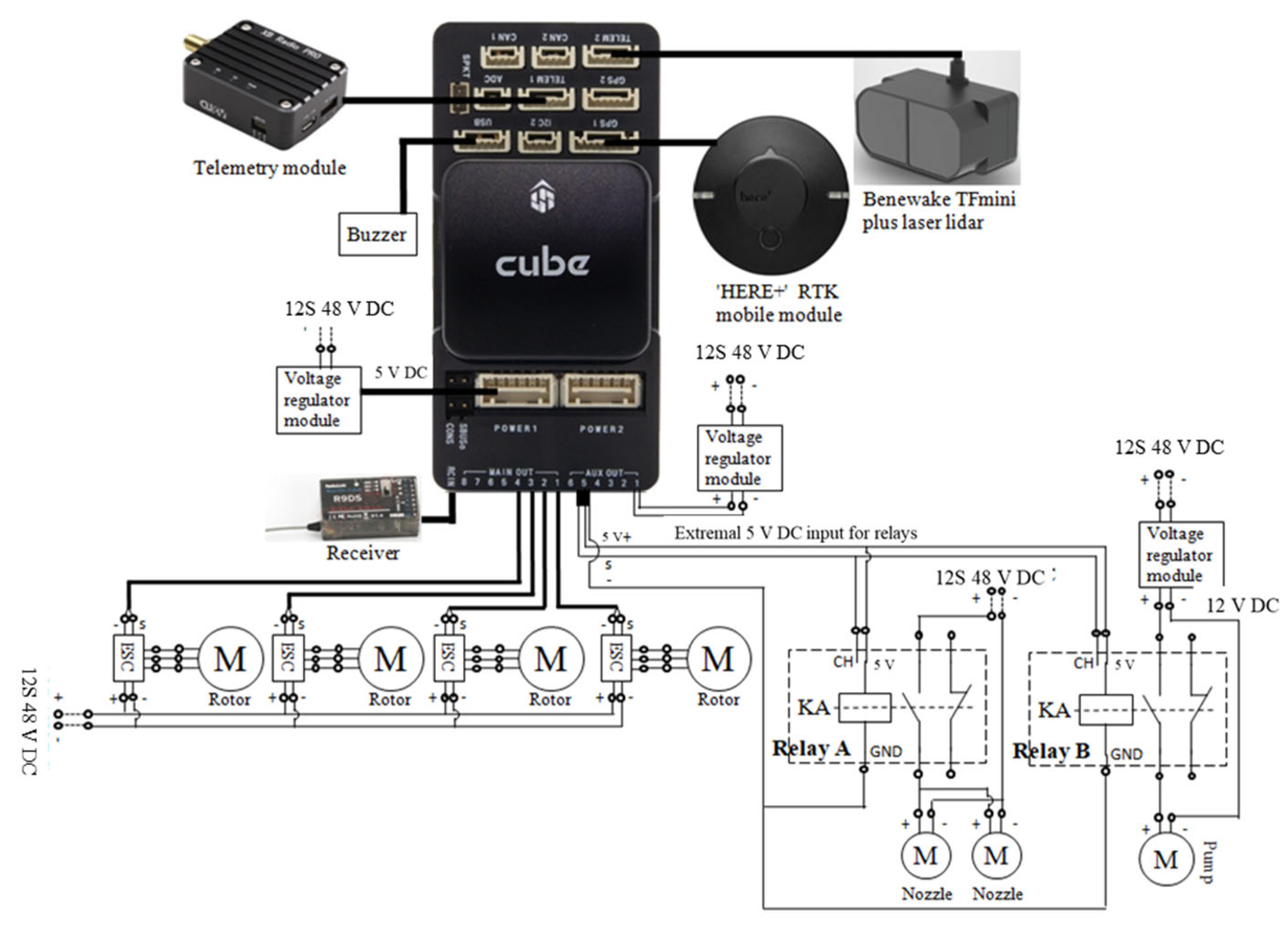
2.2. UAV Platform and Technical Parameters
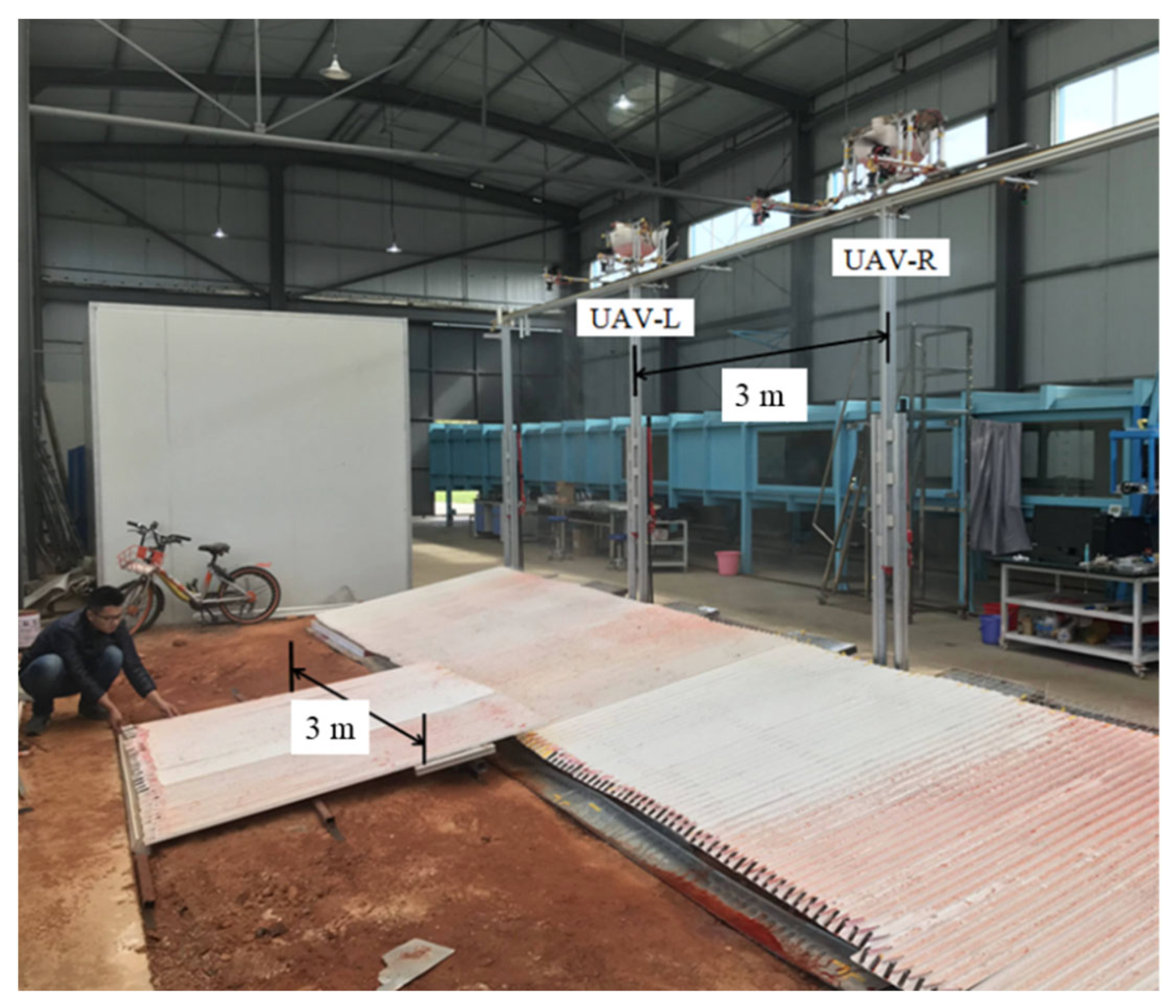
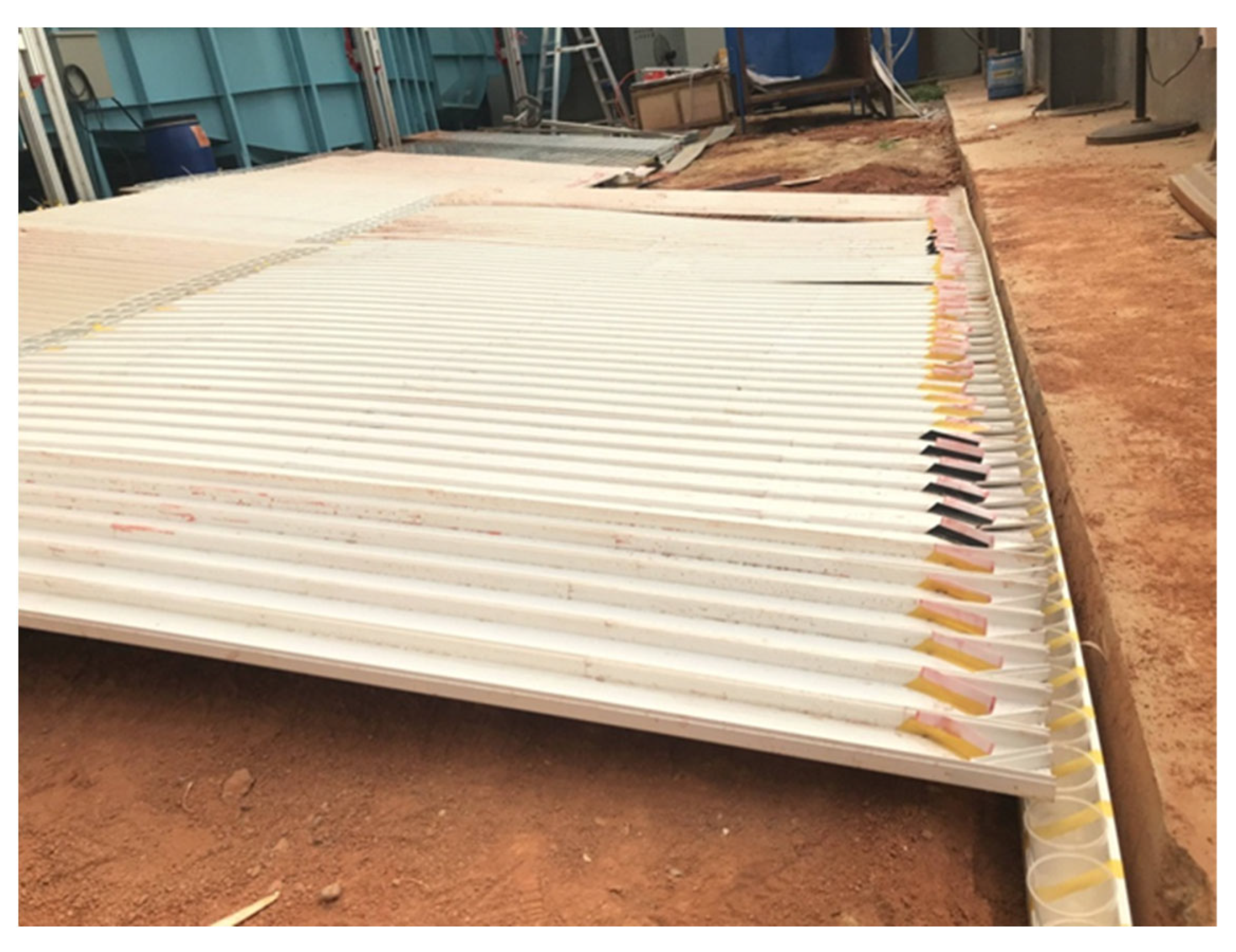
2.3. Indoor Tests of Dual-UAV Spraying
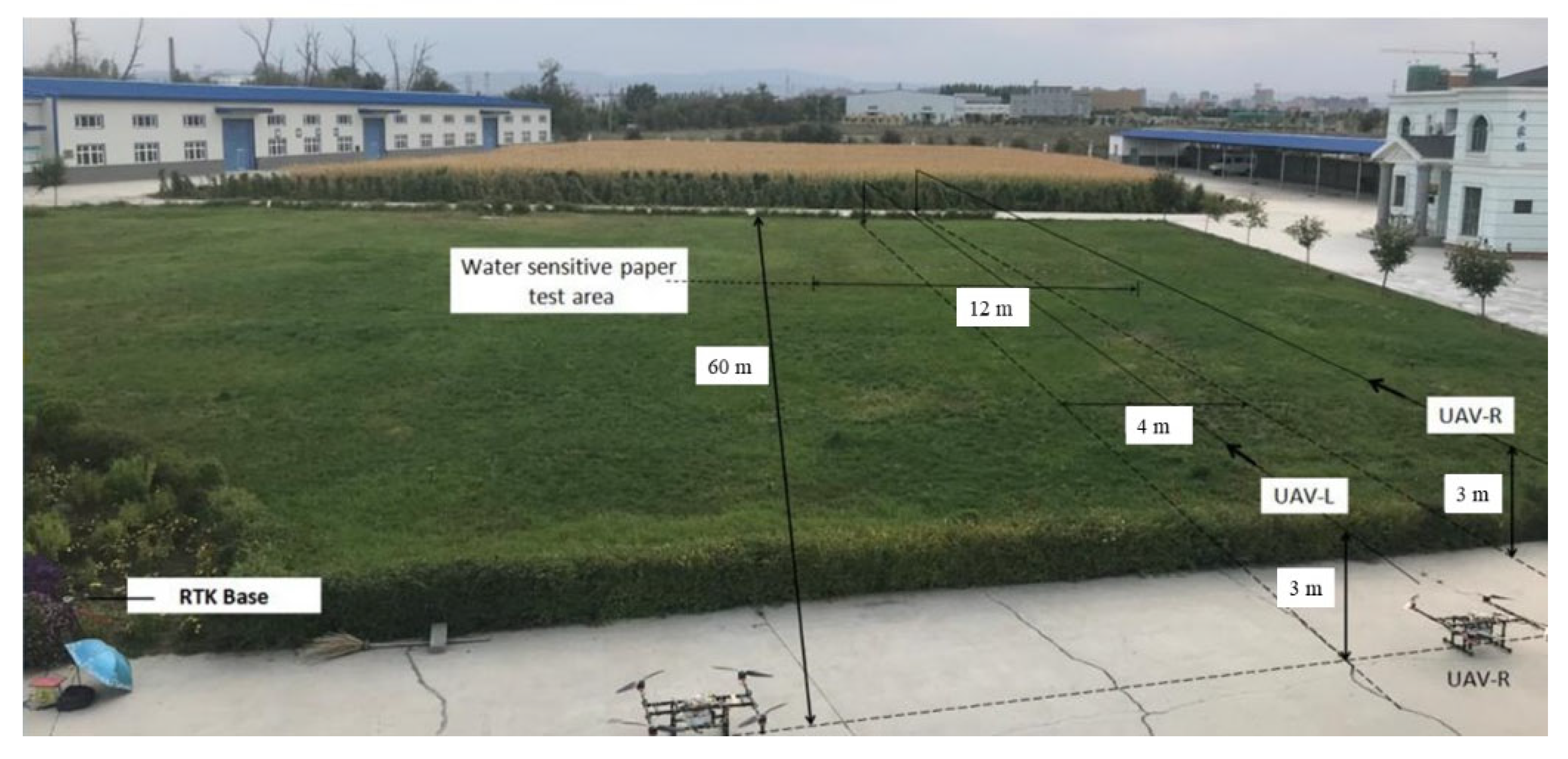
2.4. Outdoor Tests of Dual-UAV
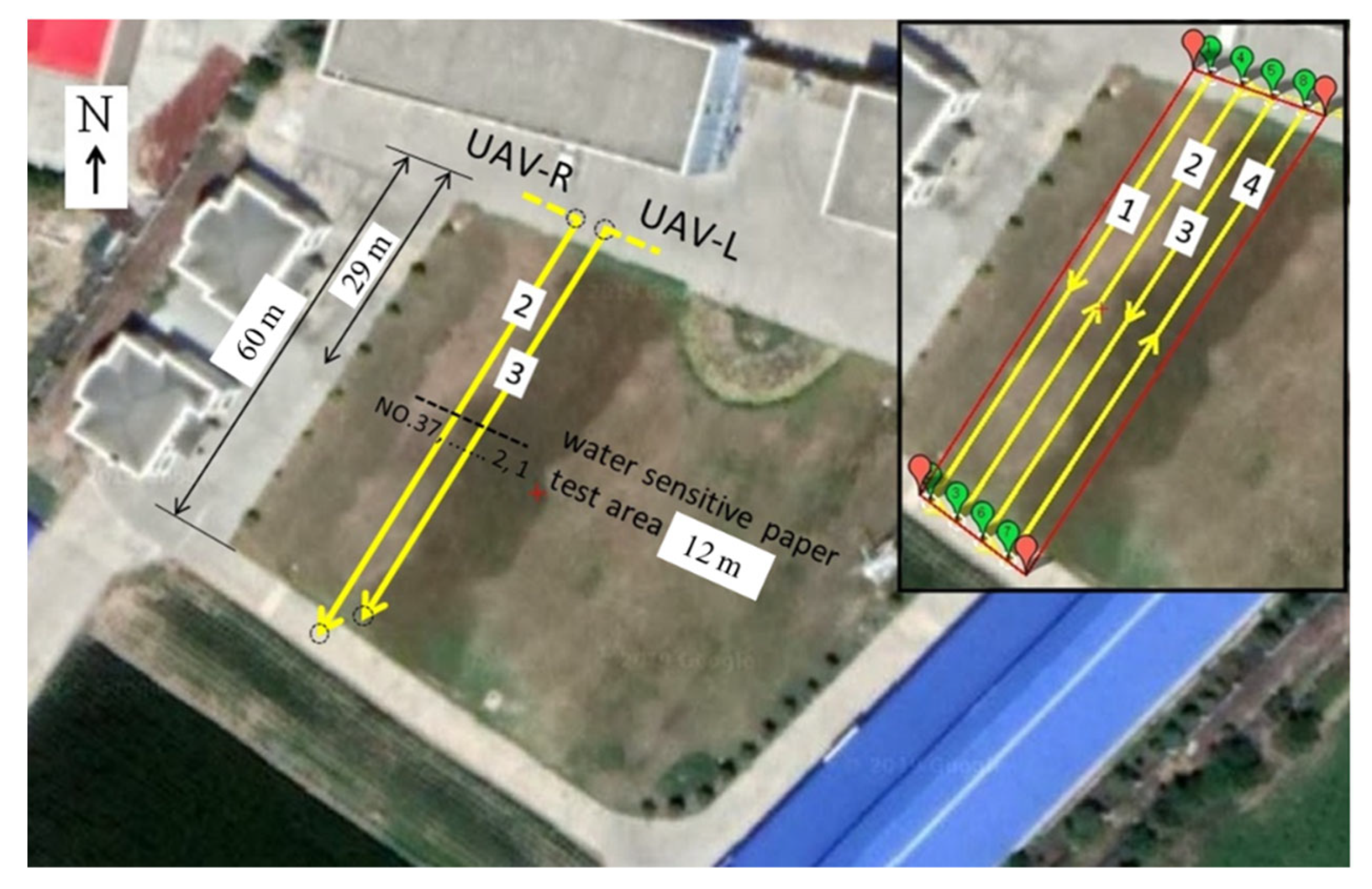
2.4.1. Path Planning
2.4.2. Experiment Design
2.5. Data Analysis
3. Results
3.1. Comparison Results with Indoor Test
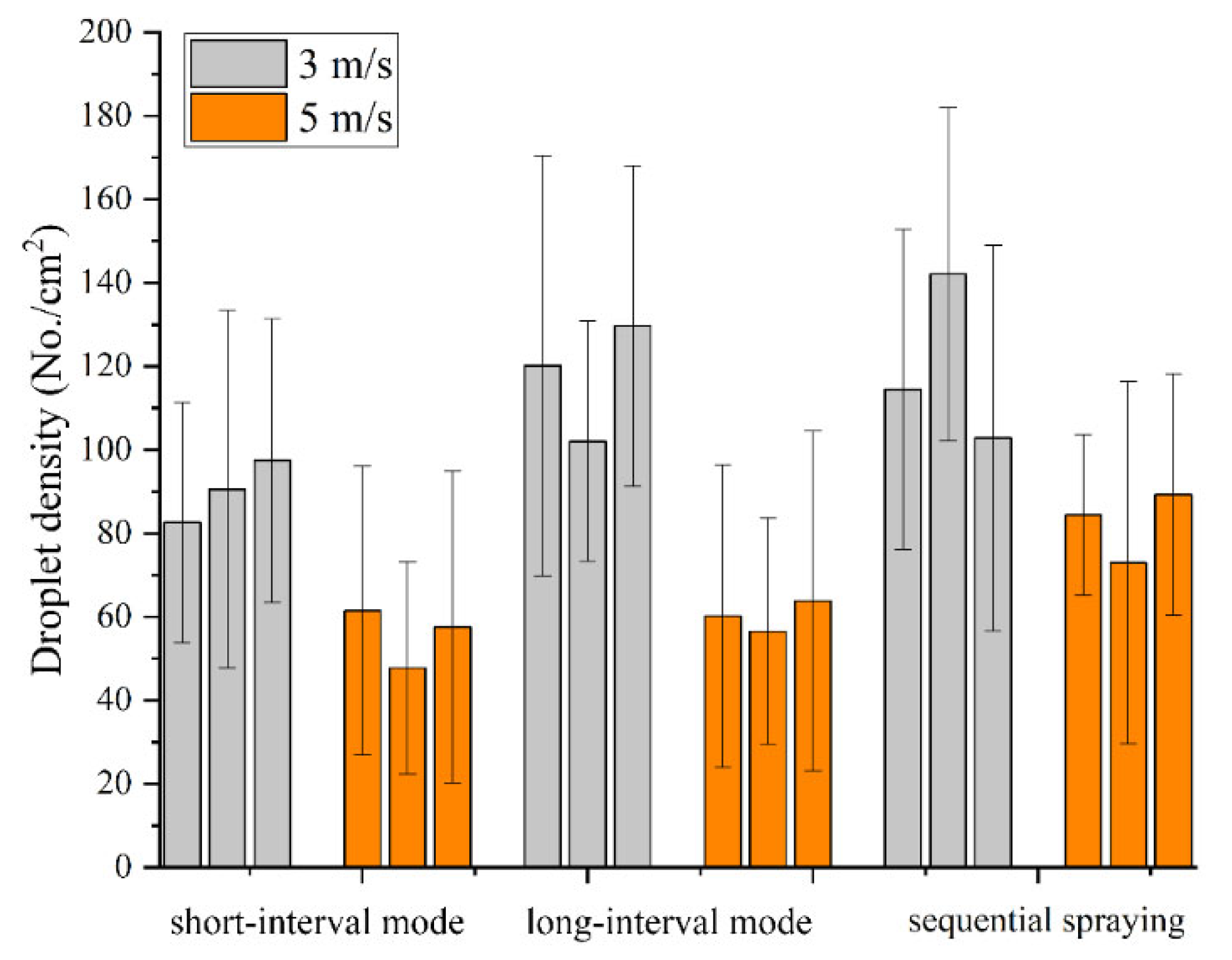
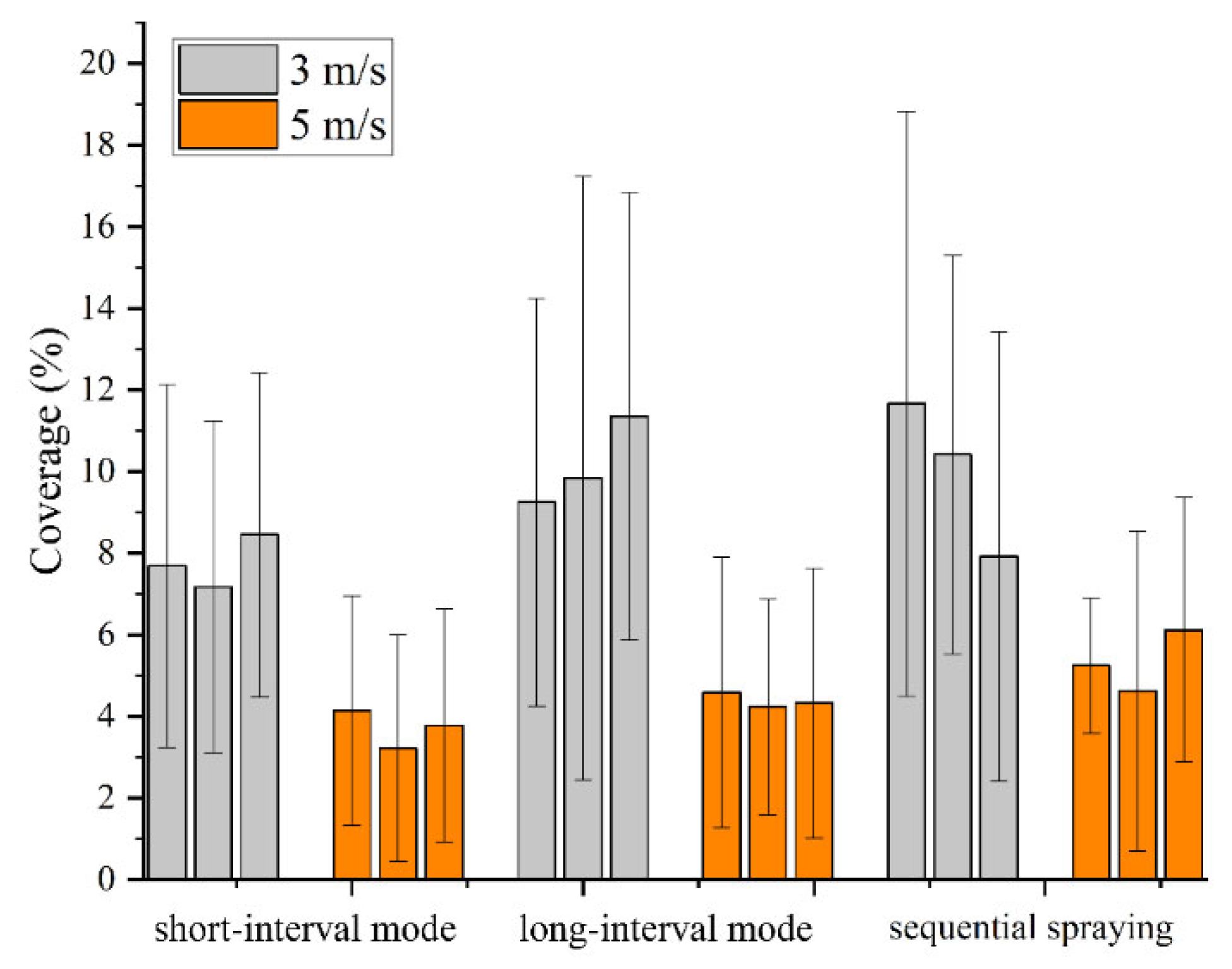
3.2. Droplet Distribution Results of Different Operating Modes
3.2.1. Spray Overlapping Area
3.2.2. Dual-UAV Spray Area
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Lan, Y.; Fritz, B.K.; Hoffmann, W.C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Li, J.; Lan, Y.; Shi, Y. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV. Trans. Chin. Soc. Agric. Eng. 2018, 34, 104–118. [Google Scholar]
- Zhang, Y.; Huang, X.; Lan, Y.; Wang, L.; Lu, X.; Yan, K.; Deng, J.; Zeng, W. Development and Prospect of UAV-Based Aerial Electrostatic Spray Technology in China. Appl. Sci. 2021, 11, 4071. [Google Scholar] [CrossRef]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Ouyang, F.; Wang, G.; Qi, H.; Xu, W.; Yang, W.; Zhang, Y.; Lan, Y. Droplet distributions in cotton harvest aid applications vary with the interactions among the unmanned aerial vehicle spraying parameters. Ind. Crop. Prod. 2021, 163, 113324. [Google Scholar] [CrossRef]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of Unmanned Aerial Spraying Systems and related Spray Drift: A Review. Front. Plant. Sci. 2022, 13, 870956. [Google Scholar]
- Zhan, Y.; Chen, P.; Xu, W.; Chen, S.; Han, Y.; Lan, Y.; Wang, G. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution. Biosyst. Eng. 2022, 216, 32–45. [Google Scholar] [CrossRef]
- Ivić, S.; Andrejčuk, A.; Družeta, S. Autonomous control for multi-agent non-uniform spraying. Appl. Soft Comput. 2019, 80, 742–760. [Google Scholar] [CrossRef]
- McAllister, W.; Osipychev, D.; Davis, A.; Chowdhary, G. Agbots: Weeding a field with a team of autonomous robots. Comput. Electron. Agric. 2019, 163, 104827. [Google Scholar] [CrossRef]
- Arguenon, V.; Bergues-Lagarde, A.; Rosenberger, C.; Bro, P.; Smari, W. Multi-agent based prototyping of agriculture robots. In Proceedings of the International Symposium on Collaborative Technologies and Systems (CTS’06), Las Vegas, NV, USA, 14–17 May 2006; IEEE: Piscataway Township, NJ, USA, 2006; pp. 282–288. [Google Scholar]
- Zhang, C.; Noguchi, N. Development of a multi-robot tractor system for agriculture field work. Comput. Electron. Agric. 2017, 142, 79–90. [Google Scholar] [CrossRef]
- Jimenez, A.; Cardenas, P.; Canales, A.; Jimenez, F.; Portacio, A. A survey on intelligent agents and multi-agents for irrigation scheduling. Comput. Electron. Agric. 2020, 176, 105474. [Google Scholar] [CrossRef]
- Barriuso, A.L.; Villarrubia González, G.; De Paz, J.F.; Lozano, Á.; Bajo, J. Combination of multi-agent systems and wireless sensor networks for the monitoring of cattle. Sensors 2018, 18, 108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Bucknall, R. A survey of formation control and motion planning of multiple unmanned vehicles. Robotica 2018, 36, 1019–1047. [Google Scholar] [CrossRef]
- García-Magariño, I.; Lacuesta, R.; Lloret, J. ABS-SmartComAgri: An agent-based simulator of smart communication protocols in wireless sensor networks for debugging in precision agriculture. Sensors 2018, 18, 998. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, M.; Zhou, J.; Li, P. Data communication mechanism for greenhouse environment monitoring and control: An agent-based IoT system. Inf. Process. Agric. 2020, 7, 444–455. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Han, X.; Chen, S.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total Environ. 2020, 737, 139793. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Deng, X.; Cheng, S. Effect of Droplet Size Parameters on Droplet Deposition and Drift of Aerial Spraying by Using Plant Protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Lan, Y.; Wen, S.; Hewitt, A.J.; Yao, W.; Chen, P. Meteorological and flight altitude effects on deposition, penetration, and drift in pineapple aerial spraying. Asia-Pac. J. Chem. Eng. 2019, 15, e2382. [Google Scholar] [CrossRef]
- Tang, Q.; Chen, L.; Zhang, R.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Effects of application height and crosswind on the crop spraying performance of unmanned helicopters. Comput. Electron. Agric. 2021, 181, 105961. [Google Scholar] [CrossRef]
- Qin, W.; Qiu, B.; Xue, X.; Chen, C.; Xu, Z.; Zhou, Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Liao, J.; Zang, Y.; Luo, X.; Zhou, Z.; Lan, Y.; Zang, Y.; Gu, X.; Xu, W.; Hewitt, A.J. Optimization of variables for maximizing efficacy and efficiency in aerial spray application to cotton using unmanned aerial systems. Int. J. Agric. Biol. Eng. 2019, 12, 10–17. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of unmanned aerial vehicle flight height on droplet distribution, drift and control of cotton aphids and spider mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Hou, C.J.; Luo, S.M.; Lin, J.T.; Yang, Z.; Huang, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 1–7. [Google Scholar] [CrossRef]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Jin, J.; Liu, A. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–46. [Google Scholar]
- Qin, W.; Xue, X.; Zhang, S.; Wei, G.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Xue, X.; Lan, Y.; Sun, Z.; Chang, C.; Hoffmann, W.C. Develop an unmanned aerial vehicle based automatic aerial spraying system. Comput. Electron. Agric. 2016, 128, 58–66. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of Spray Deposition, Control Efficacy on Wheat Aphids and Working Efficiency in the Wheat Field of the Unmanned Aerial Vehicle with Boom Sprayer and Two Conventional Knapsack Sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef] [Green Version]
- Meng, Y.; Su, J.; Song, J.; Chen, W.; Lan, Y. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron. Agric. 2020, 170, 105282. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Yu, X.; Chai, T. Distributed adaptive fault-tolerant close formation flight control of multiple trailing fixed-wing UAVs. ISA Trans. 2020, 106, 181–199. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Liu, H. Aerodynamic model-based robust adaptive control for close formation flight. Aerosp. Sci. Technol. 2018, 79, 5–16. [Google Scholar] [CrossRef]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- DJI. AGRAS T16 Manual User; DJI: Shenzhen, China, 2019; Volume 2022. [Google Scholar]
- Wang, G.; Lan, Y.; Qi, H.; Chen, P.; Hewitt, A.; Han, Y. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 75, 1546–1555. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Xu, W.; Zhan, Y.; Wang, G.; Yang, W.; Lan, Y. Determining application volume of unmanned aerial spraying systems for cotton defoliation using remote sensing images. Comput. Electron. Agric. 2022, 196, 106912. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test NO. | Name | Description | Meteorological Conditions |
|---|---|---|---|
| 1 | Simultaneous spray 1 | Side by side t = 0.2 s | 18:30–20:00 p.m., 25 September, sunny, mean wind speed m/s 1.4 ± 0.6 (north), mean temperature 24.4 ± 3.1 °C, mean humidity 29.3 ± 2.0% |
| 2 | Simultaneous spray 2 | Side by side t = 0.3 s | |
| 3 | Simultaneous spray 3 | Side by side t = 1 s | |
| 4 | Simultaneous spray 4 | One ahead t = 1.3 s | |
| 5 | Simultaneous spray 5 | One ahead t = 2.7 s | |
| 6 | Simultaneous spray 6 | One ahead t = 4.5 s | |
| 7 | Sequential spray 1 | One by one | |
| 8 | Sequential spray 2 | One by one | |
| 9 | Sequential spray 3 | One by one |
| Test NO. | Name | Description | Meteorological Conditions |
|---|---|---|---|
| 10 | Simultaneous spray 1 | Side by side t = 0.3 s | 18:30–20:00 p.m., 24 September, sunny, mean wind speed m/s 1.2 ± 0.6 (northeast), mean temperature 26.2 ± 2.8 °C, mean humidity 33 ± 2.2% |
| 11 | Simultaneous spray 2 | Side by side t = 0.7 s | |
| 12 | Simultaneous spray 3 | Side by side t = 1 s | |
| 13 | Simultaneous spray 4 | One ahead t = 2.5 s | |
| 14 | Simultaneous spray 5 | One ahead t = 3.5 s | |
| 15 | Simultaneous spray 6 | One ahead t = 4.3 s | |
| 16 | Sequential spray 1 | One by one | |
| 17 | Sequential spray 2 | One by one | |
| 18 | Sequential spray 3 | One by one |
| Speed | Simultaneous Spraying (Short Interval) | Simultaneous Spraying (Long Interval) | Sequential Spraying | |
|---|---|---|---|---|
| Droplet Density (No/cm2) | 3 m/s | 90.2 ± 6.08 b 1 | 117 ± 11.4 ab | 120 ± 16.4 a |
| 5 m/s | 55.6 ± 5.77 b | 60.2 ± 2.96 b | 82.2 ± 6.85 a | |
| Coverage (%) | 3 m/s | 7.77 ± 0.53 a | 10.15 ± 0.89 a | 10 ± 1.55 a |
| 5 m/s | 3.72 ± 0.38 b | 4.39 ± 0.15 ab | 5.33 ± 0.61 a |
| Speed | Simultaneous Spraying (Short Interval) | Simultaneous Spraying (Long Interval) | Sequential Spraying | |
|---|---|---|---|---|
| Droplet Density | 3 m/s | 44.2 ± 4.07 a 2 | 60.5 ± 4.03 b | 52.5 ± 4.57 ab |
| 5 m/s | 62.3 ± 3.38 a | 61.4 ± 3.59 a | 52.5 ± 5.22 a | |
| Coverage | 3 m/s | 66.7 ± 2.69 a | 87.4 ± 9.02 b | 78.1 ± 9.58 ab |
| 5 m/s | 82.5 ± 9.51 a | 79.2 ± 6.32 a | 73.3 ± 11.1 a |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Ouyang, F.; Zhang, Y.; Lan, Y. Preliminary Evaluation of Spraying Quality of Multi-Unmanned Aerial Vehicle (UAV) Close Formation Spraying. Agriculture 2022, 12, 1149. https://doi.org/10.3390/agriculture12081149
Chen P, Ouyang F, Zhang Y, Lan Y. Preliminary Evaluation of Spraying Quality of Multi-Unmanned Aerial Vehicle (UAV) Close Formation Spraying. Agriculture. 2022; 12(8):1149. https://doi.org/10.3390/agriculture12081149
Chicago/Turabian StyleChen, Pengchao, Fan Ouyang, Yali Zhang, and Yubin Lan. 2022. "Preliminary Evaluation of Spraying Quality of Multi-Unmanned Aerial Vehicle (UAV) Close Formation Spraying" Agriculture 12, no. 8: 1149. https://doi.org/10.3390/agriculture12081149
APA StyleChen, P., Ouyang, F., Zhang, Y., & Lan, Y. (2022). Preliminary Evaluation of Spraying Quality of Multi-Unmanned Aerial Vehicle (UAV) Close Formation Spraying. Agriculture, 12(8), 1149. https://doi.org/10.3390/agriculture12081149