
Data-Driven Simulator: Redesign of Chickpea Harvester Reels



Abstract
:1. Introduction
2. Materials and Methods
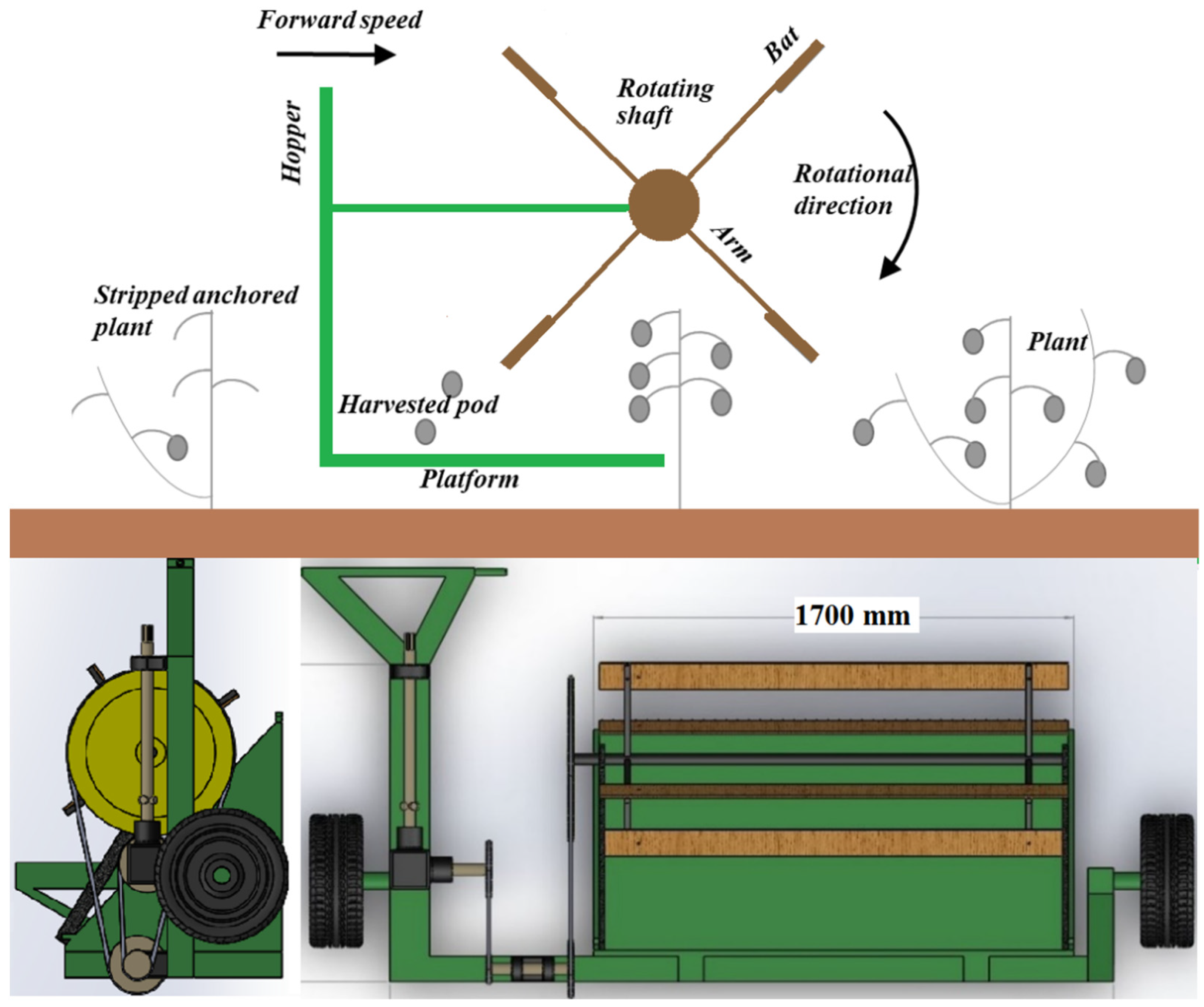
2.1. Chickpea Harvester Reels and Harvesting Test
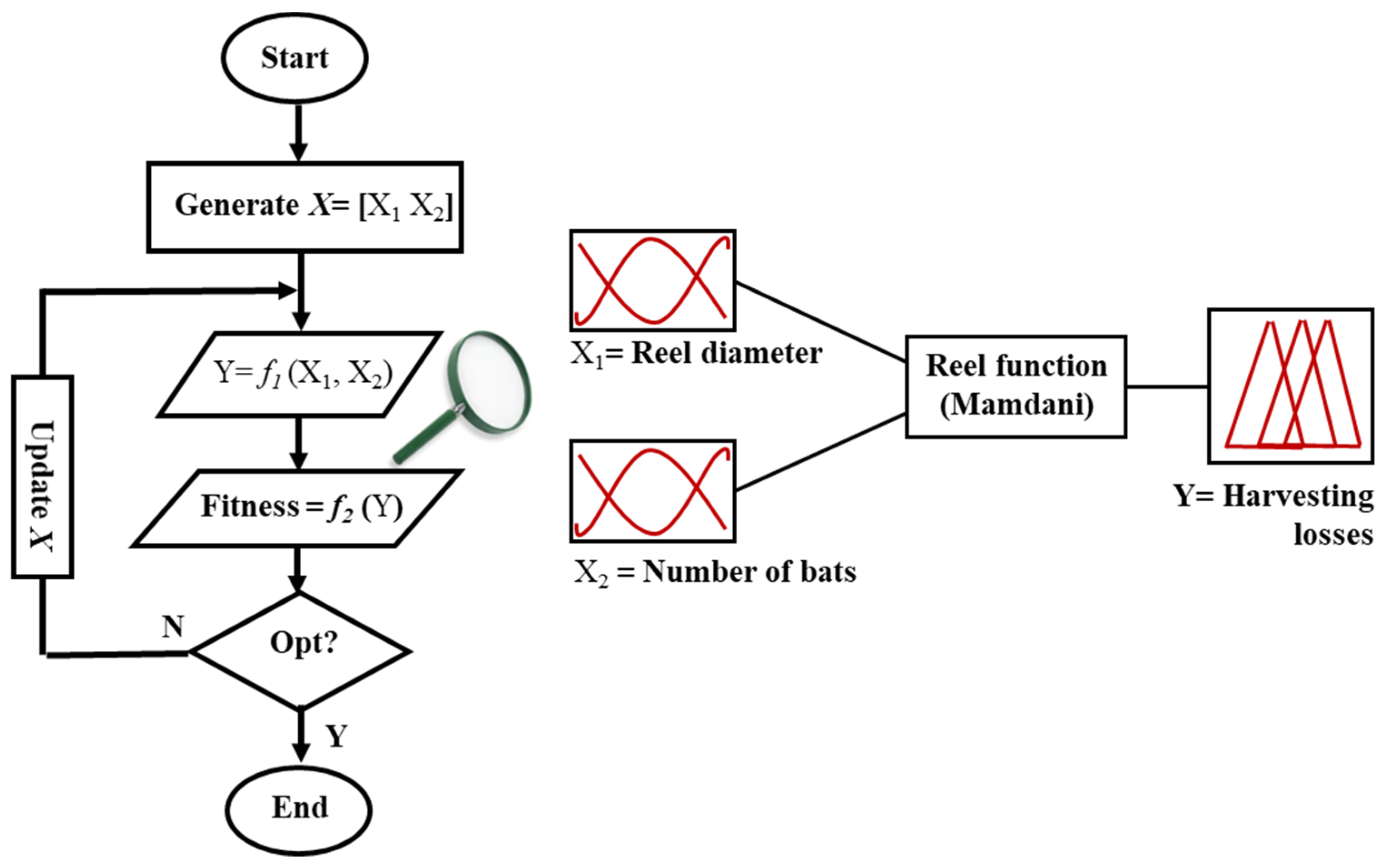
2.2. Modeling-Optimization Approach
- Step 1: SA randomly defines state S1 = [X1, X2] and sets a primary temperature (T).
- Step 2: A neighbor state of S1, named S2, is defined according to the stochastic pre-specified algorithm.
- Step 3: S1 and S2 are fed into fuzzy models to calculate Y1 and Y2, i.e., harvesting losses.
- Step 4: Calculation of fitness values S1 and S2, i.e., E (Y1) and E (Y2).
- Step 5: if E(Y2) < E(Y1) then set S2 = S1, otherwise keep S1 as the optimum solution with the probability of ΔE/T.
- Step 6: Decrease T and go to Step 2, noting that by decreasing T in several iterations, the probability of ΔE/T converges to 1, leading to the optimum solution.
- Step 7: Continue iterating until the termination condition is met.
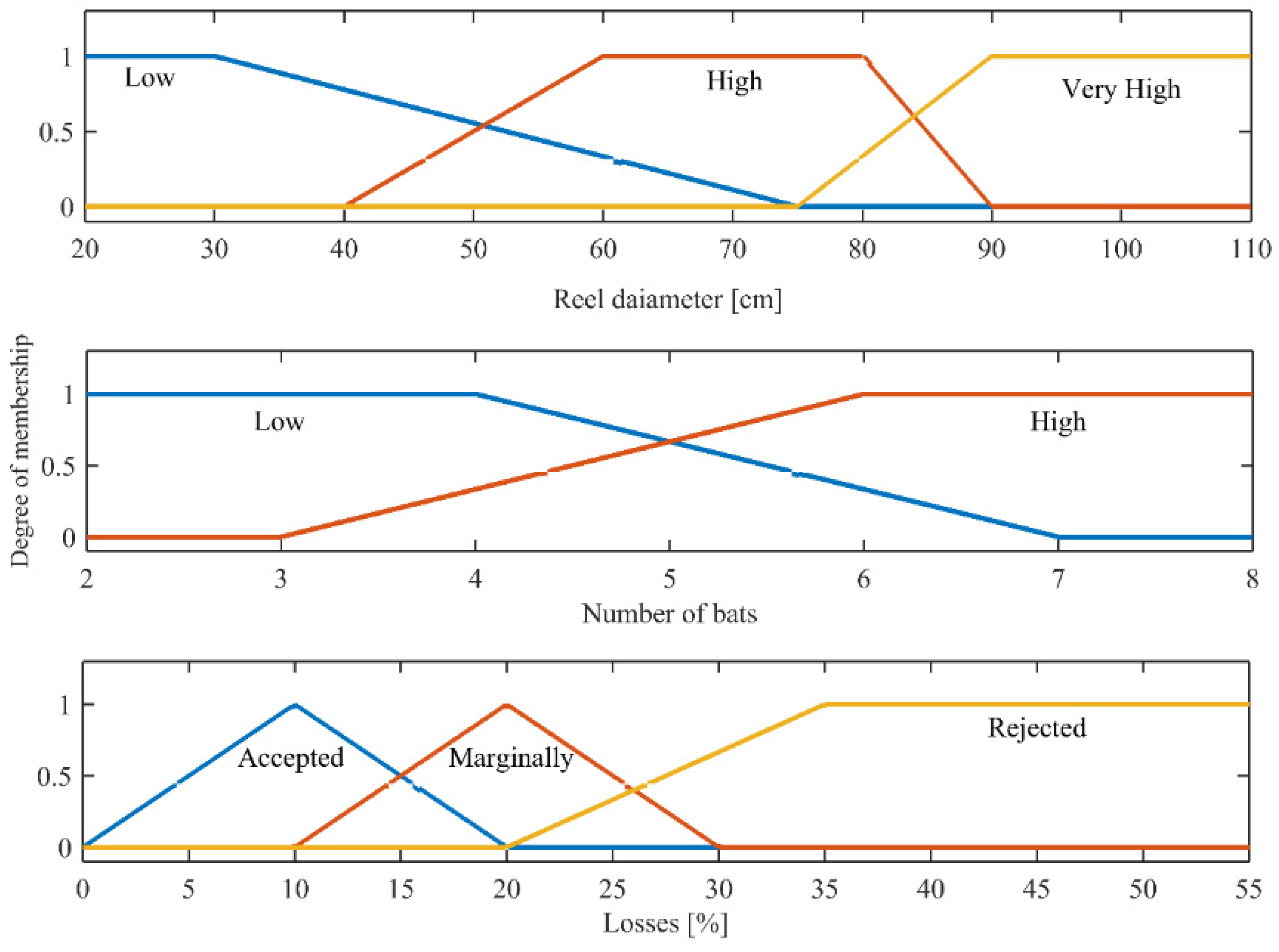
2.2.1. Fuzzification
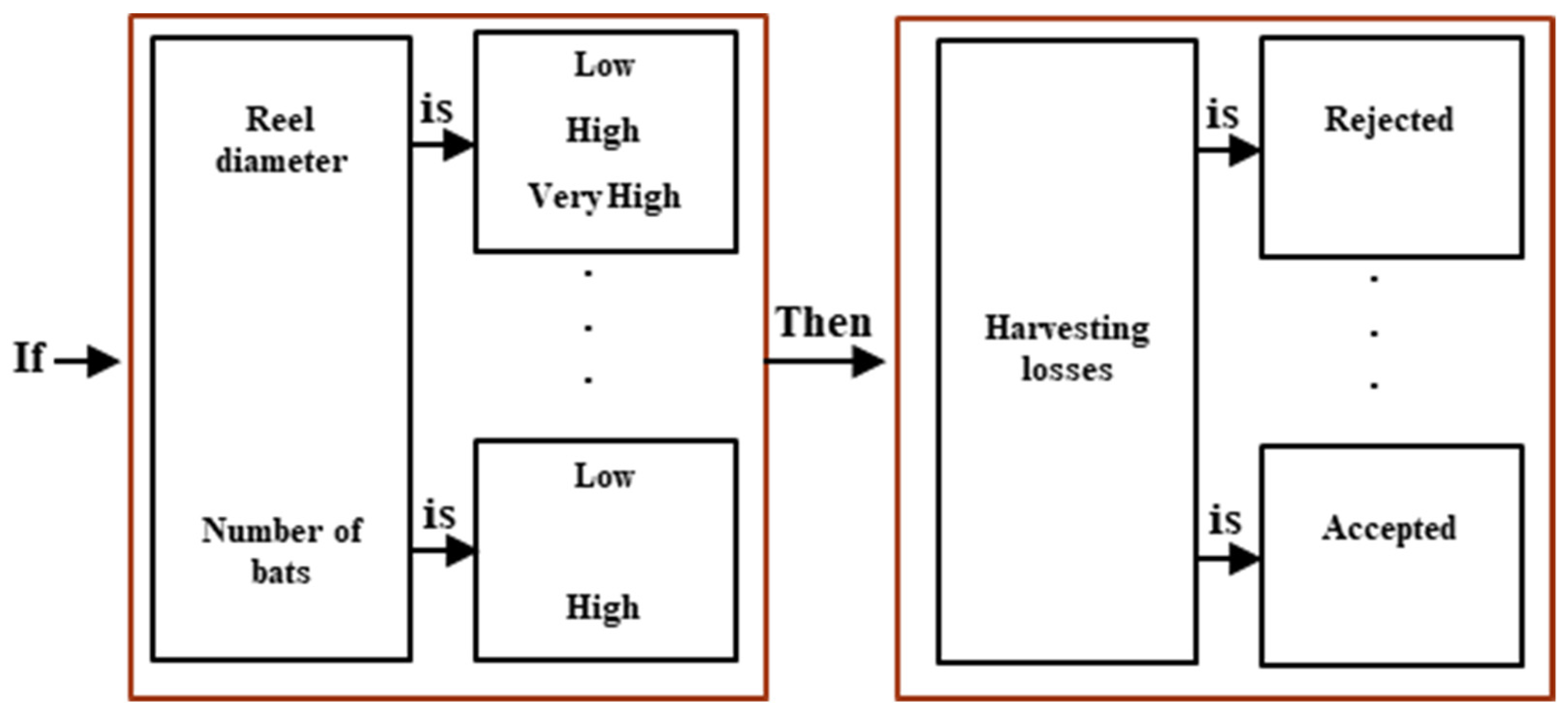
2.2.2. Rules
2.2.3. Defuzzification
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- FAOSTAT. Chickpea Production in 2019, Crops/Regions/World list/Production Quantity (Pick Lists). Retrieved 7 October 2021. 2020. Available online: http://www.fao.org/faostat/en/#data/QC (accessed on 7 January 2022).
- European Parliament’s Committee on Agriculture and Rural Development (COMAGRI). Measures at Farm Level to Reduce Greenhouse Gas Emissions from EU Agriculture 2014. Available online: https://www.europarl.europa.eu/RegData/etudes/note/join/2014/513997/IPOL-AGRI_NT(2014)513997_EN.pdf (accessed on 5 June 2021).
- Kanouni, H.; Sadeghzadeh Ahari, D.; Saeid, A.; Shobeiri, S.S.; Mahdieh, M.; Haji Hasani, M.; Beheshti Danalou, M. Investigation of grain yield stability of Desi type chickpea across different environments and introducing promising lines. J. Agric. Sci. Sustain. Prod. 2021, 31, 295–312. [Google Scholar] [CrossRef]
- Niazi, A.; Golpira, H.; Akhijahani, H.S. Evaluation of a chickpea harvesting header with porous plate. J. Agric. Mach. 2021. (In Farsi) [Google Scholar] [CrossRef]
- Zareei, S.; Abdollahpour, S. Modeling the optimal factors affecting combine harvester header losses. Agric. Eng. Int. CIGR J. 2016, 18, 60–65. [Google Scholar]
- Hirai, Y.; Inoue, E.; Mori, K.; Hashiguchi, K. Investigation of mechanical interaction between a combine harvester reel and crop stalks. Biosyst. Eng. 2002, 83, 307–317. [Google Scholar] [CrossRef]
- Hirai, Y.; Inoue, E.; Mori, K.; Hashiguchi, K. Analysis of reaction forces and posture of a bunch of crop stalks during reel operations of a combine harvester. CIGR E-J. 2002, IV, 1–18. [Google Scholar]
- Oduori, M.F.; Mbuya, T.O.; Sakai, J.; Inoue, E. Modeling of crop stem deflection in the context of combine harvester reel design and operation. Agric. Eng. Int. CIGR J. 2012, 14, 21–28. [Google Scholar]
- Oduori, M.F.; Mbuya, T.O.; Sakai, J.; Inoue, E. Kinematics of the tined combine harvester reel. Agric. Eng. Int. CIGR J. 2012, 14, 53–60. [Google Scholar]
- Craessaerts, G.; Saeys, W.; Missotten, B.; De Baerdemaeker, J. Identification of the cleaning process on combine harvesters, Part II: A fuzzy model for prediction of the sieve losses. Biosyst. Eng. 2010, 106, 97–102. [Google Scholar] [CrossRef]
- Chai, X.; Xu, L.; Li, Y.; Qiu, J.; Li, Y.; Lv, L.; Zhu, Y. Development and experimental analysis of a fuzzy grey control system on rapeseed cleaning loss. Electronics 2020, 9, 1764. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, M.S.; Huang, R.L. Research on application of fuzzy neural network in combine harvester. In Proceedings of the 2008 Fifth International Conference on Fuzzy Systems and Knowledge Discovery, Jinan, China, 18–20 October 2008; Volume 3, pp. 231–235. [Google Scholar]
- Dimitrov, V.; Borisova, L.; Nurutdinova, I. Development and analysis of fuzzy expert data for technological adjustment of a grain harvester header. E3S Web Conf. 2020, 175, 05027. [Google Scholar] [CrossRef]
- Manuja, R.; Bindra, S.S.; Gupta, S. Combinational fuzzy expert system (CFES) for academic performance appraisal. Adv. Appl. Math. Sci. 2019, 18, 691–703. [Google Scholar]
- Torenbeek, E. Advanced Aircraft Design: Conceptual Design, Analysis and Optimization of Subsonic Civil Airplanes; John Wiley & Sons: Hoboken, NJ, USA, 2013; Available online: https://doi-org.ezp.semantak.com/10.1002/9781118568101.ch7 (accessed on 5 June 2021).
- Más, F.R.; Zhang, Q.; Hansen, A.C. Mechatronics and Intelligent Systems for Off-Road Vehicles; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar] [CrossRef]
- Zhu, J.H.; Zhang, W.H.; Xia, L. Topology optimization in aircraft and aerospace structures design. Arch. Comput. Methods Eng. 2016, 23, 595–622. [Google Scholar] [CrossRef]
- Cornelis, B.; Forrier, B.; Cumbo, R.; Risaliti, E.; Janssens, K.; Tamarozzi, T.; Desmet, W. Virtual sensing strategies utilizing various model complexities: Industrial applications. In Commercial Vehicle Technology 2020/2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 512–523. [Google Scholar] [CrossRef]
- Schwich, S.; Schattenberg, J.; Frerichs, L. Development of a Machine Learning-Based Assistance System for Computer-Aided Process Optimization within a Self-Propelled Sugar Beet Harvester. Available online: https://elibrary.asabe.org/abstract.asp?JID=5&AID=51512&CID=virt2020&T=1 (accessed on 5 June 2021).
- Golpira, H.; Golpîra, H. Soft simulator for redesigning of a chickpea harvester header. Comput. Electron. Agric. 2017, 135, 252–259. [Google Scholar] [CrossRef]
- Savsani, V.; Rao, R.; Vakharia, D. Optimal weight design of a gear train using particle swarm optimization and simulated annealing algorithms. Mech. Mach. Theory 2010, 45, 531–541. [Google Scholar] [CrossRef]
- Ingber, L. Simulated annealing: Practice versus theory. Math. Comput. Model. 1993, 18, 29–57. [Google Scholar] [CrossRef] [Green Version]
- Suman, B.; Kumar, P. A survey of simulated annealing as a tool for single and multiobjective optimization. J. Oper. Res. Soc. 2006, 57, 1143–1160. [Google Scholar] [CrossRef]
- Aguiare Oliveira Junior, H.; Ingber, L.; Petraglia, A.; Petraglia, M.R.; Machado, M.A.S. Fuzzy Modeling with Fuzzy Adaptive Simulated Annealing. In Stochastic Global Optimization and Its Applications with Fuzzy Adaptive Simulated Annealing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 139–148. [Google Scholar] [CrossRef]
- Golpira, H.; Tavakoli, T.; Baerdemaeker, J. Design and development of a chickpea stripper harvester. Span. J. Agric. Res. 2013, 11, 929–934. [Google Scholar] [CrossRef] [Green Version]
- Golpira, H. Conceptual design of a chickpea harvesting header. Span. J. Agric. Res. 2013, 11, 635–641. [Google Scholar] [CrossRef] [Green Version]
- Golpira, H. Redesign and evaluation of a chickpea harvester. J. Biosyst. Eng. 2015, 40, 102–109. [Google Scholar] [CrossRef] [Green Version]
- Chopard, B.; Tomassini, M. Simulated Annealing. In An Introduction to Metaheuristics for Optimization; Springer International Publishing: Cham, Switzerland, 2018; pp. 59–79. [Google Scholar] [CrossRef]
- Babuška, R. Fuzzy Modeling for Control; Springer Science & Business Media: Berlin, Germany, 2012; Volume 12. [Google Scholar]
- Babuska, R. Fuzzy Systems, Modeling and Identification; Lecture Notes; Delft University of Technology, Department of Electrical Engineering: Delft, The Netherlands, 2002. [Google Scholar]
- Junsiri, C.; Cinsuwan, W. Prediction equations for header losses of combine harvesters when harvesting Thai Hom Mali rice. Songklanakarin J. Sci. Technol. 2009, 31, 613–620. [Google Scholar]
- Fadavi, R.; Abdollahpour, S.; Moghaddam, M. Design, construction and evaluation of grain harvester combine’s header loss based on statistical analysis and modeling the optimal factors. J. Exp. Biol. 2017, 5, 537–544. [Google Scholar] [CrossRef]
- Doungpueng, K.; Saengprachatanarug, K.; Posom, J.; Chuan-Udom, S. Selection of proper combine harvesters to field conditions by an effective field capacity prediction model. Int. J. Agric. Biol. Eng. 2020, 13, 125–134. [Google Scholar] [CrossRef]
- Omid, M.; Lashgari, M.; Mobli, H.; Alimardani, R.; Mohtasebi, S.; Hesamifard, R. Design of fuzzy logic control system incorporating human expert knowledge for combine harvester. Expert Syst. Appl. 2010, 37, 7080–7085. [Google Scholar] [CrossRef]
- Liang, Z.; Li, Y.; Xu, L. Grain sieve loss fuzzy control system in rice combine harvesters. Appl. Sci. 2019, 9, 114. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Cao, M.; Wang, B.; Hu, Z.; Xu, H.; Wang, S.; Yu, Z. Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture 2022, 12, 179. [Google Scholar] [CrossRef]
- Petre, I. Combine Harvesters: Theory, Modeling and Design; CRC Press Inc.: Boca Taton, FL, USA, 2015; pp. 3–25. [Google Scholar]
- Redenius, J.; Belau, S.; Irmer, D.; Ruckelshausen, A.; Middelberg, R.; Spiekermann, S.; Hertzberg, J. Virtual Harvesting as a Key Element in the Development of a Novel LiDAR Based Combine Harvester Steering System; VDI-Berichte: Düsseldorf, Germany, 2019; Volume 2361, pp. 173–178. [Google Scholar]
- Siemens, M.C. Effect of guard spacing, guard attachments and reel type on chickpea harvesting losses. Appl. Eng. Agric. 2006, 22, 651–657. [Google Scholar] [CrossRef]
- Golpira, H.; Rovira-Más, F.; Golpira, H.; Saiz-Rubio, V. Mathematical model-based redesign of chickpea harvester reel. Span. J. Agric. Res. 2021, 19, e0203. [Google Scholar] [CrossRef]
- Pandey, A.; Parhi, D.R. Autonomous mobile robot navigation in cluttered environment using hybrid Takagi-Sugeno fuzzy model and simulated annealing algorithm controller. World J. Eng. 2016, 13, 431–440. [Google Scholar] [CrossRef]
- Bagheri Tolabi, H.; Hosseini, R.; Shakarami, M.R. A robust hybrid fuzzy–simulated annealing–intelligent water drops approach for tuning a distribution static compensator nonlinear controller in a distribution system. Eng. Optim. 2016, 48, 999–1018. [Google Scholar] [CrossRef]
- Craessaerts, G.; de Baerdemaeker, J.; Missotten, B.; Saeys, W. Fuzzy control of the cleaning process on a combine harvester. Biosyst. Eng. 2010, 106, 103–111. [Google Scholar] [CrossRef]
- Kim, D.; Druot, T.Y.; Liem, R.P. Data-Driven Operation-Based Aircraft Design Optimization. Available online: https://hal-enac.archives-ouvertes.fr/hal-02868096/document (accessed on 5 June 2021).
- Qureshi, M.R.N.; Singh, R.K.; Hasan, M.A. Decision support model to select crop pattern for sustainable agricultural practices using fuzzy MCDM. Environ. Dev. Sustain. 2018, 20, 641–659. [Google Scholar] [CrossRef]
- Zareiforoush, H.; Minaei, S.; Alizadeh, M.R.; Banakar, A.; Samani, B.H. Design, development and performance evaluation of an automatic control system for rice whitening machine based on computer vision and fuzzy logic. Comput. Electron. Agric. 2016, 124, 14–22. [Google Scholar] [CrossRef]
- Petrović, D.V.; Tanasijević, M.; Stojadinović, S.; Ivaz, J.; Stojković, P. Fuzzy Model for Risk Assessment of Machinery Failures. Symmetry 2020, 12, 525. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Ning, X.; Li, Y.; Yang, G.; Wu, P.; Chen, S. A fuzzy control strategy for the forward speed of a combine harvester based on KDD. Appl. Eng. Agric. 2017, 33, 15–22. [Google Scholar] [CrossRef]
- Miodragović, R.; Tanasijević, M.; Mileusnić, Z.; Jovančić, P. Effectiveness assessment of agricultural machinery based on fuzzy sets theory. Expert Syst. Appl. 2012, 39, 8940–8946. [Google Scholar] [CrossRef]
- Osuch, A.; Osuch, E.; Rybacki, P.; Przygodziński, P.; Kozłowski, R.; Przybylak, A. A decision support method for choosing an agricultural machinery service workshop based on fuzzy logic. Agriculture 2020, 10, 76. [Google Scholar] [CrossRef] [Green Version]
- Sola-Guirado, R.; Blanco-Roldan, G.; Gil-Ribes, J. New harvester machine for traditional olive orchards: Agronomic and industrial engineering. DYNA 2018, 93, 60–66. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Model (Year) | ||||
|---|---|---|---|---|---|
| 1 (2009) | 2 (2013) | 3 (2014) | 4 (2015) | 5 (2017) | |
| Power transmission | Chain | Derailleur | Gearbox | Gearbox | CVT gearbox |
| Chassis | Tractor-pulled | Mounted | Mounted | Semi-mounted | Semi-mounted |
| Reel type | Fixed bat | Bat | Bat | Pickup | Bat |
| Conveyor transmission | Chain | Pneumatic | - | - | - |
| Collection system | Bags | Cyclone | - | Hopper | Hopper |
| Weight (kg) | 780 | 360 | 380 | 420 | 400 |
| Number of bats | 3 | 5 | 6 | 6 | 5 |
| Diameter (m) | 0.40 | 0.30 | 0.70 | 0.70 | 0.50 |
| Losses (%) | 47 | 39 | 38 | 35 | 29 |
| Parameter | Degree | Criteria |
|---|---|---|
| Reel diameter | Low High Very high | High angular velocity of bats cause pod falling Desired zone The inappropriate ratio of reel diameter to plant height |
| Number of bats | Low High | Desired zone concerning kinematic index Desired zone concerning crop properties |
| Harvesting losses | Accepted Marginally Rejected | Desired zone A tradeoff between economic and losses Lack of economic and performance merits |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golpira, H.; Sola-Guirado, R.R. Data-Driven Simulator: Redesign of Chickpea Harvester Reels. Agriculture 2022, 12, 264. https://doi.org/10.3390/agriculture12020264
Golpira H, Sola-Guirado RR. Data-Driven Simulator: Redesign of Chickpea Harvester Reels. Agriculture. 2022; 12(2):264. https://doi.org/10.3390/agriculture12020264
Chicago/Turabian StyleGolpira, Hiwa, and Rafael R. Sola-Guirado. 2022. "Data-Driven Simulator: Redesign of Chickpea Harvester Reels" Agriculture 12, no. 2: 264. https://doi.org/10.3390/agriculture12020264
APA StyleGolpira, H., & Sola-Guirado, R. R. (2022). Data-Driven Simulator: Redesign of Chickpea Harvester Reels. Agriculture, 12(2), 264. https://doi.org/10.3390/agriculture12020264