
Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting



Abstract
:1. Introduction
2. Materials and Methods
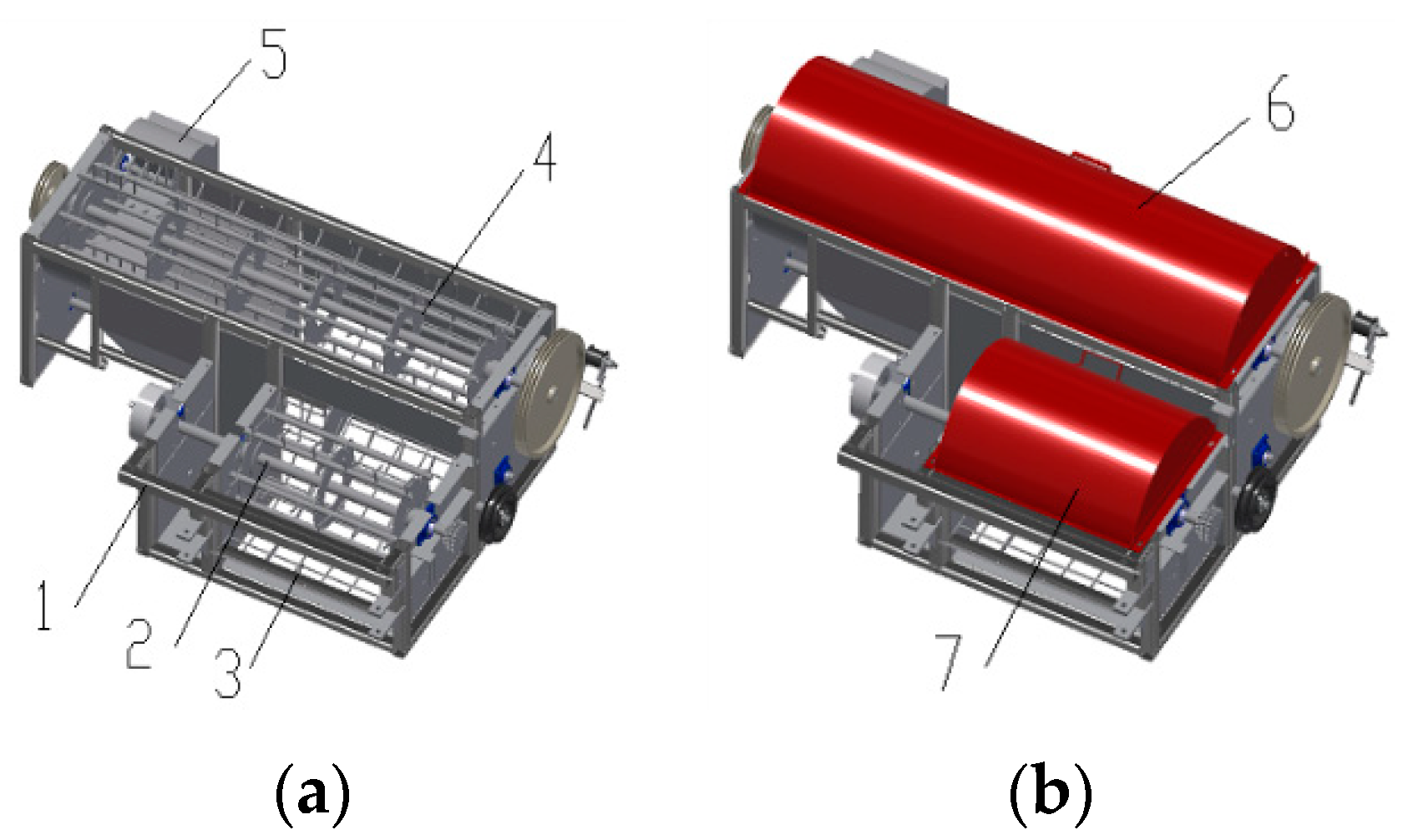
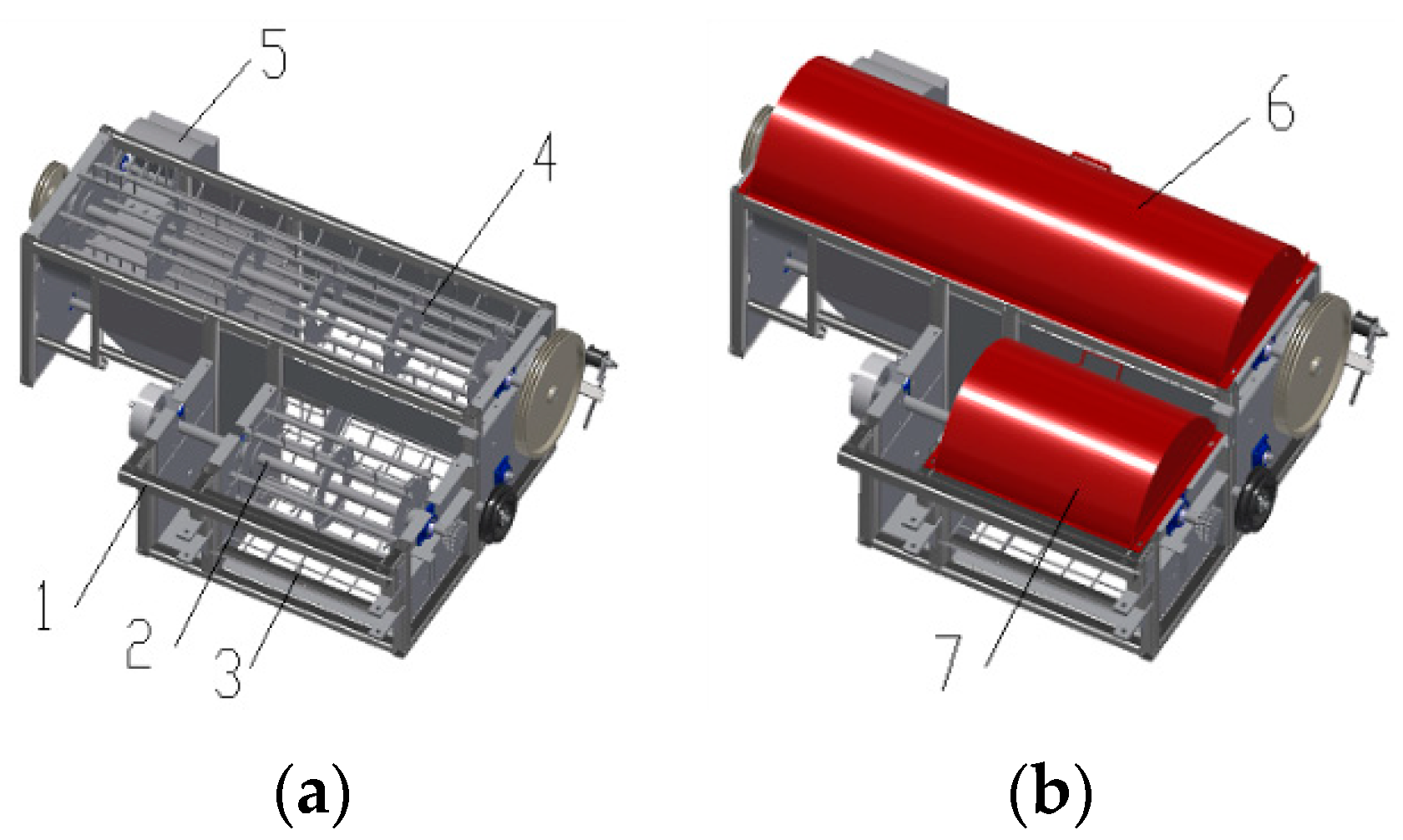
2.1. Design of Overall Structure and Principle
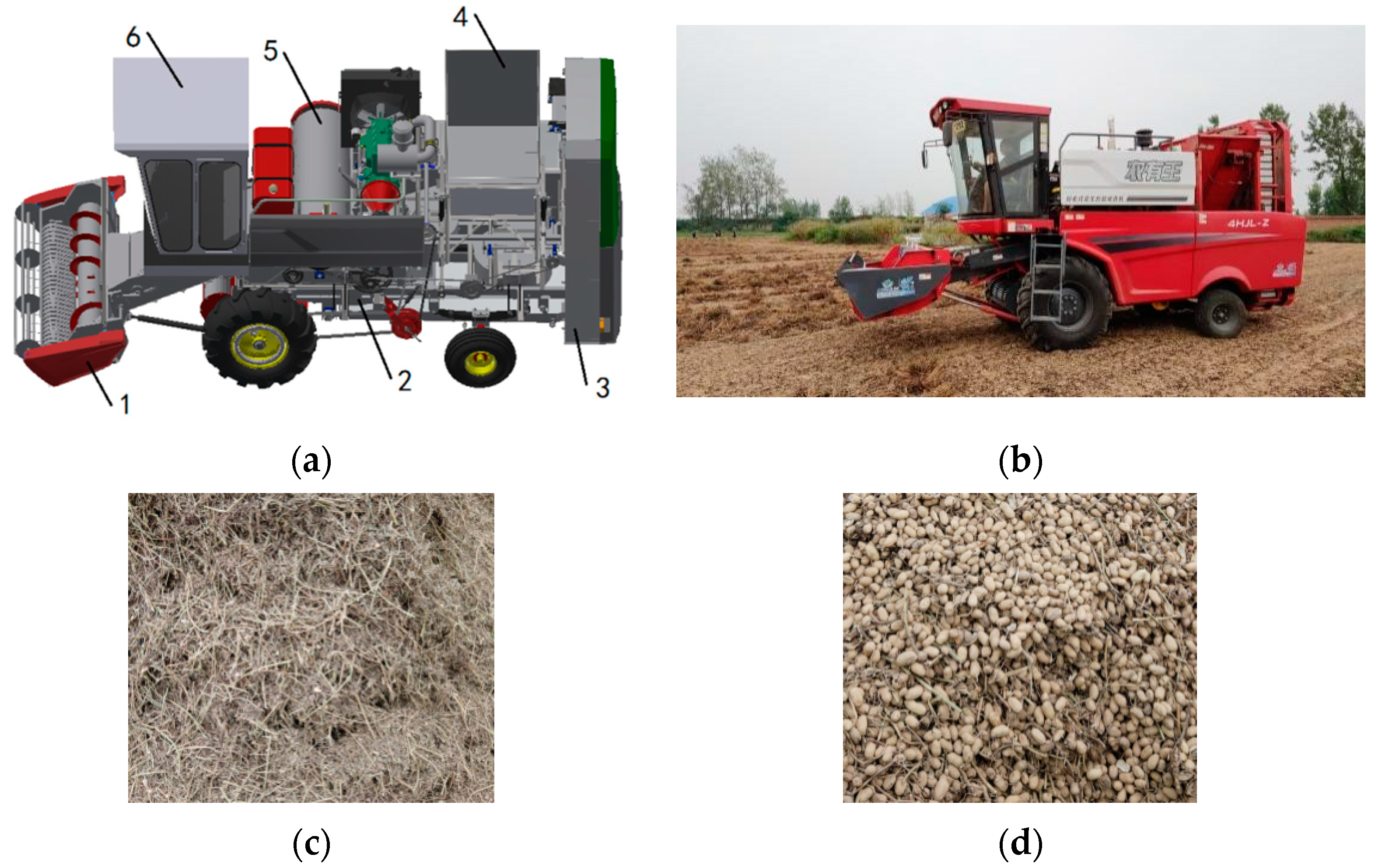
2.1.1. Overall Structure
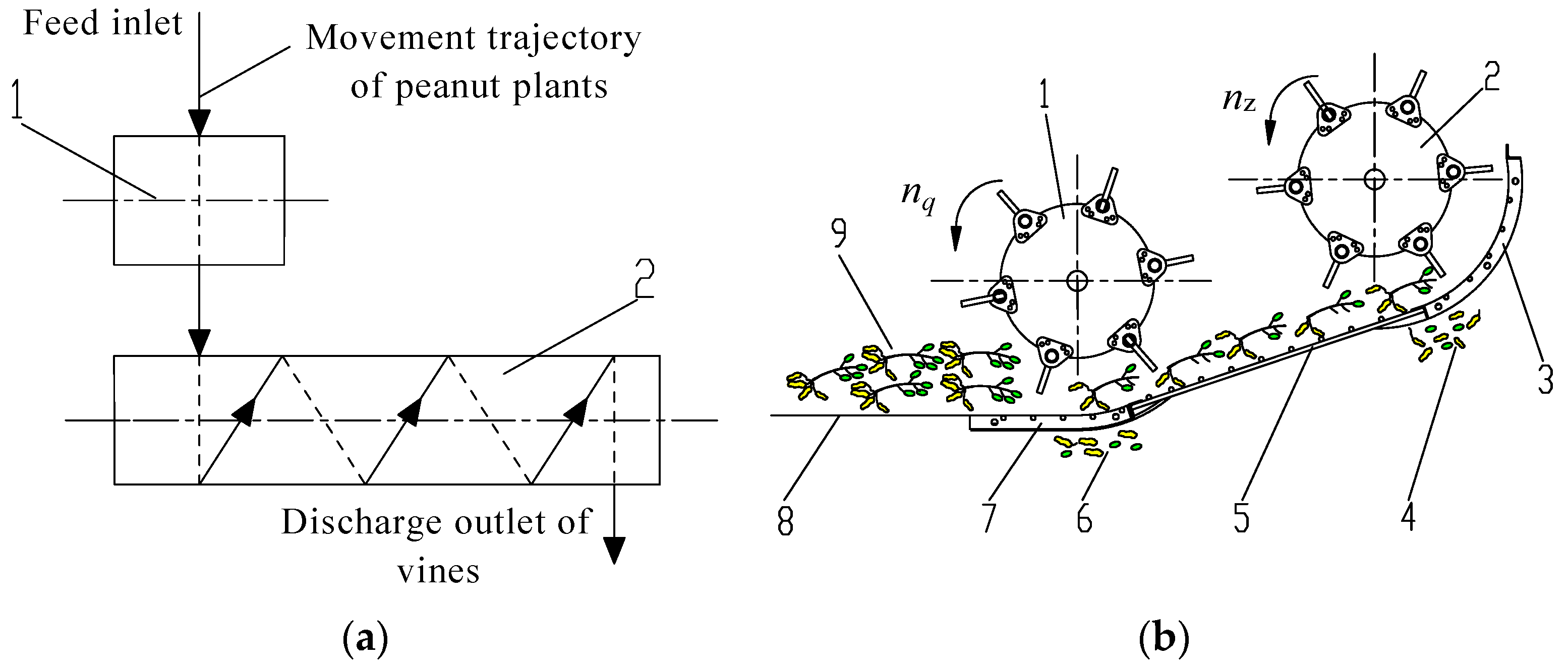
2.1.2. Working Principle
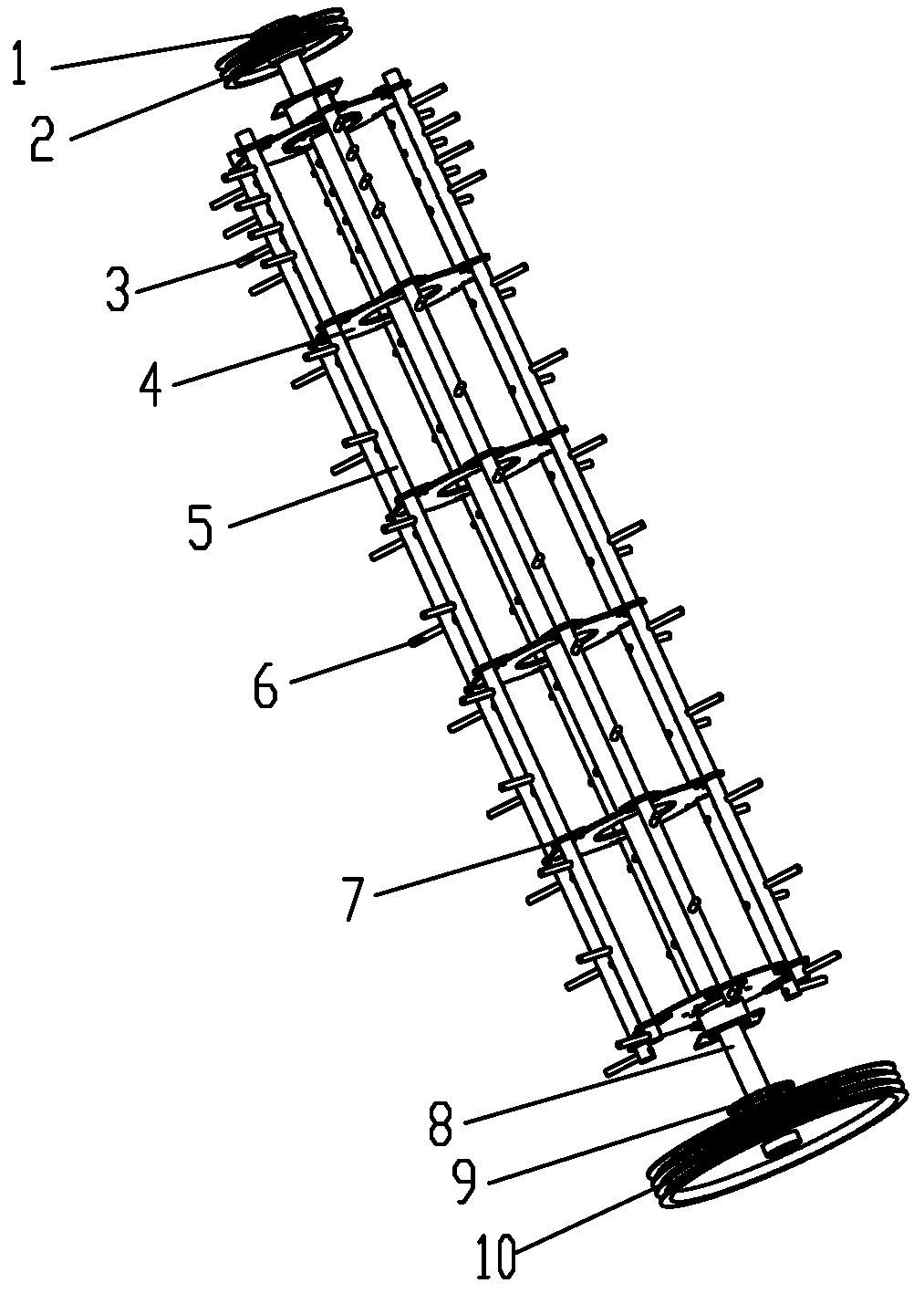
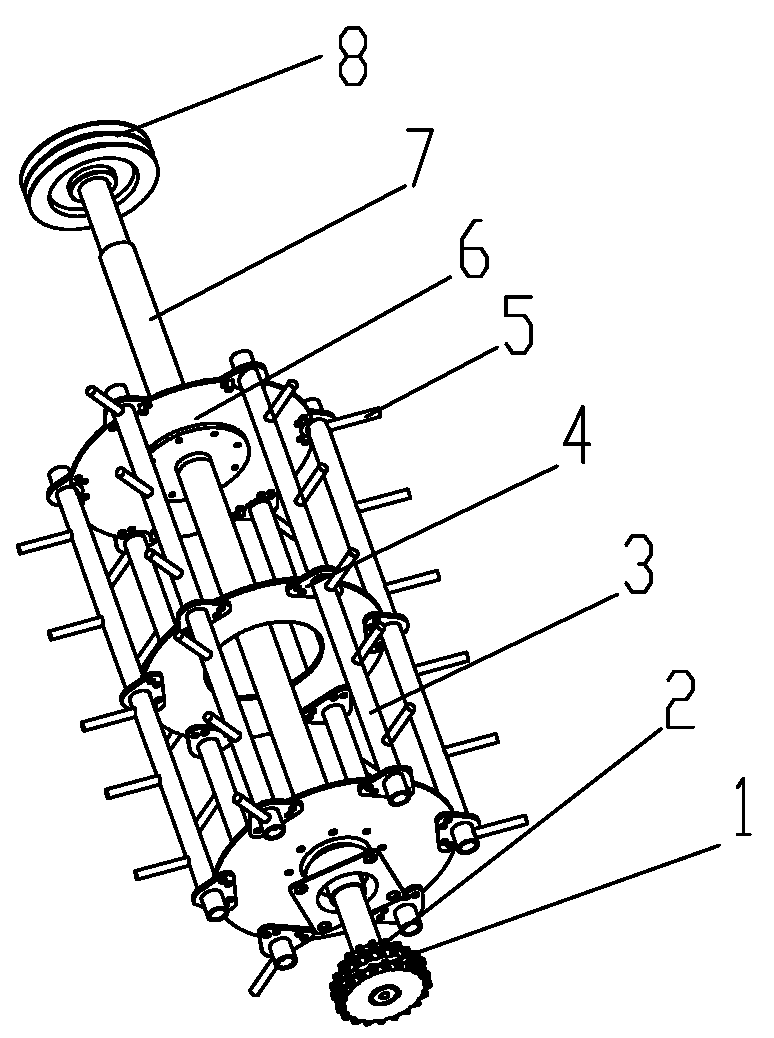
2.2. Structural Design of the Tangential Cylinder
2.2.1. Determination of the Length
2.2.2. Determination of the Number of Toothed Rods and Spike Tooth Parameters
2.2.3. Determination of the Diameter and Speed
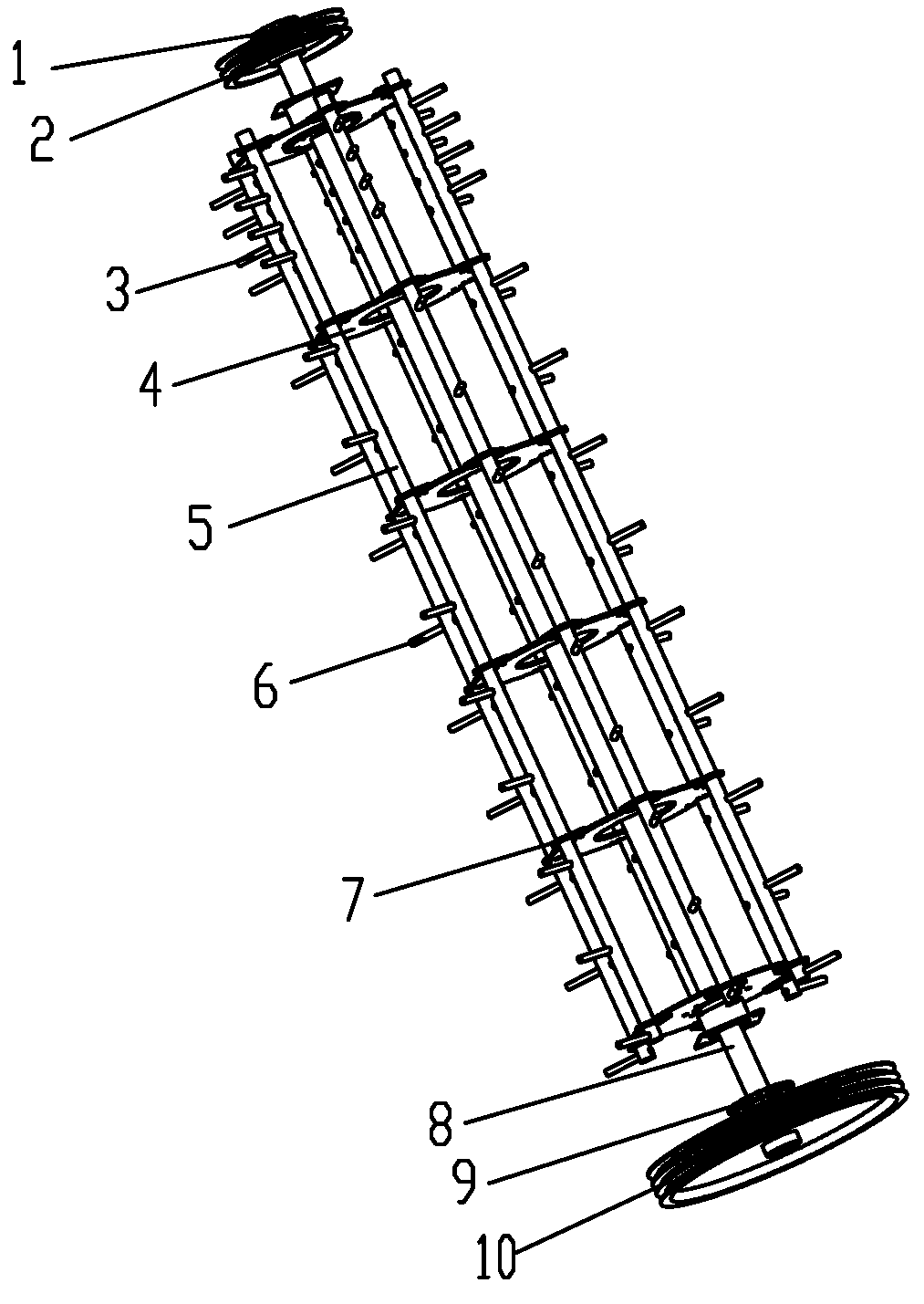
2.3. Structural Design of the Axial Cylinder
2.3.1. Determination of the Length
2.3.2. Determination of the Number of Toothed Rods and Spike Tooth Parameters
2.3.3. Determination of the Diameter and Speed
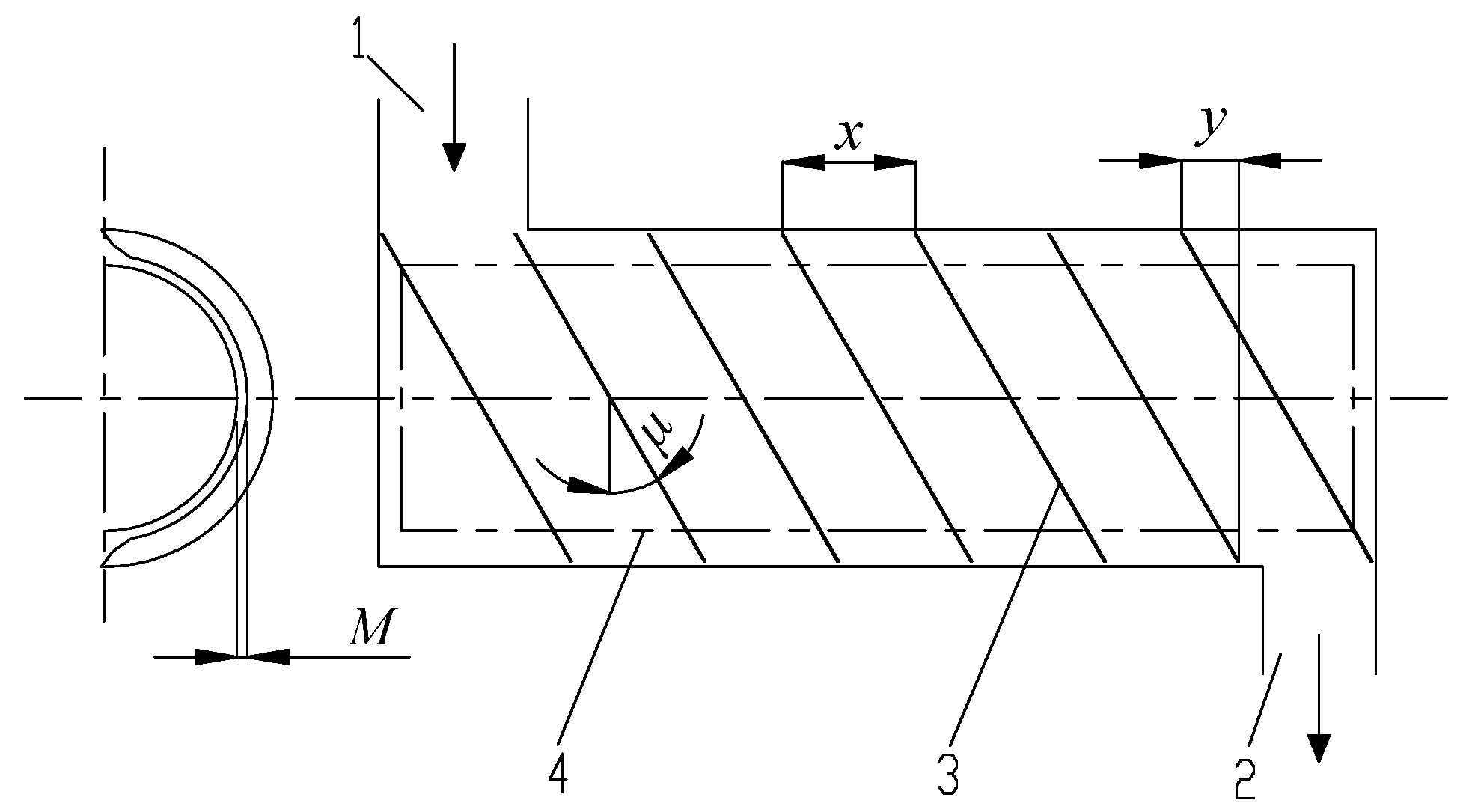
2.4. Structural Design of the Guide Plate
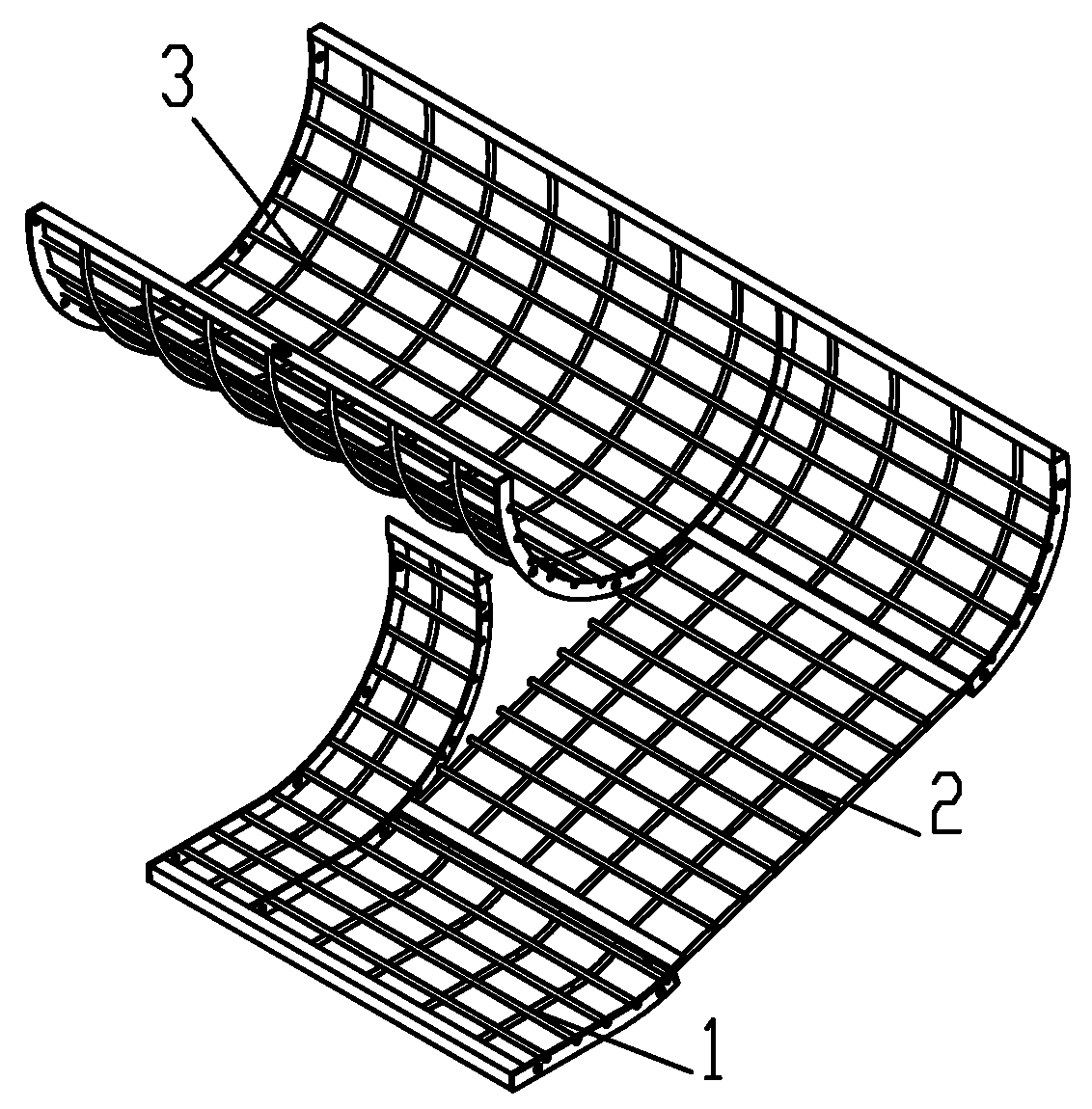
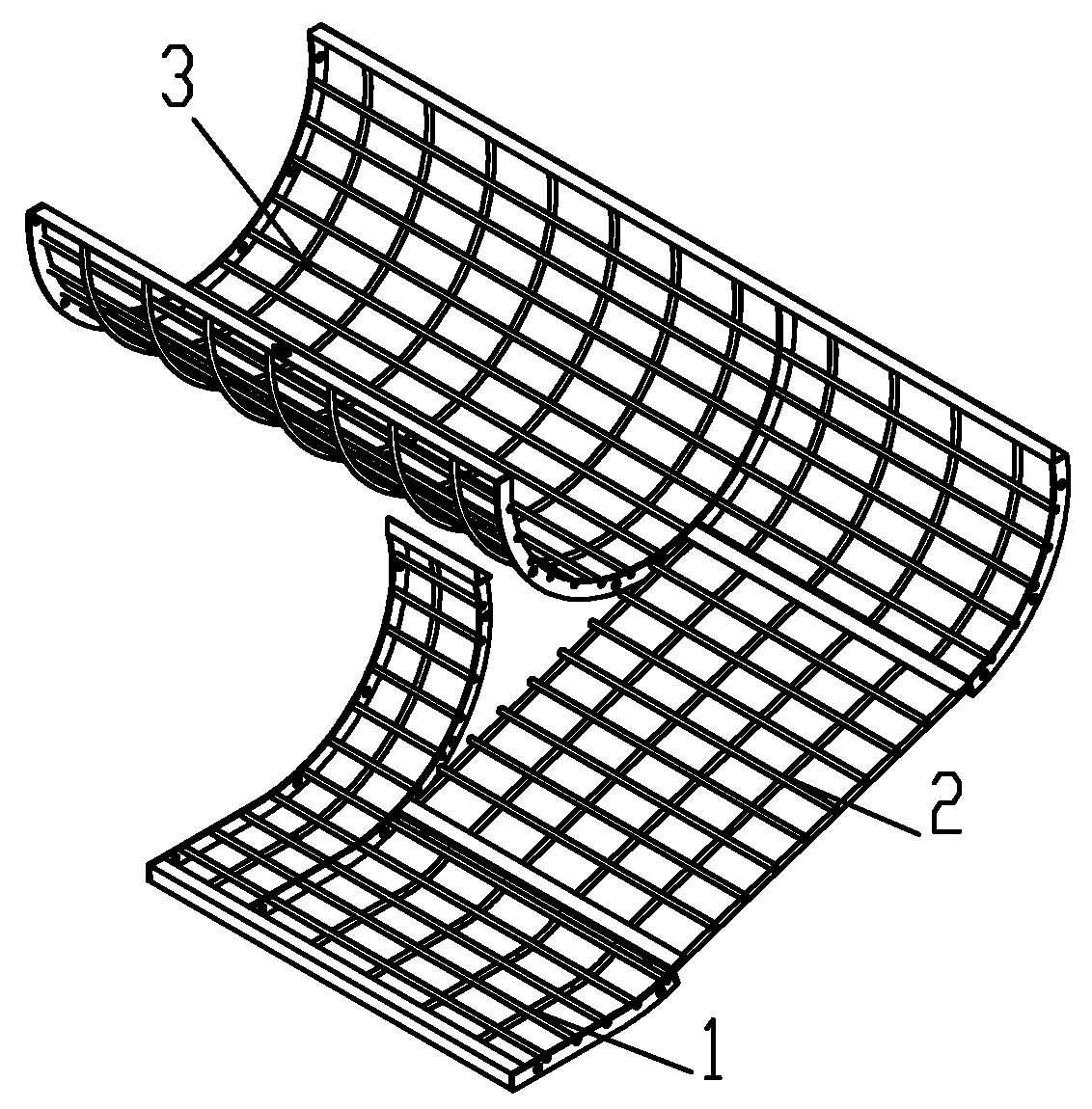
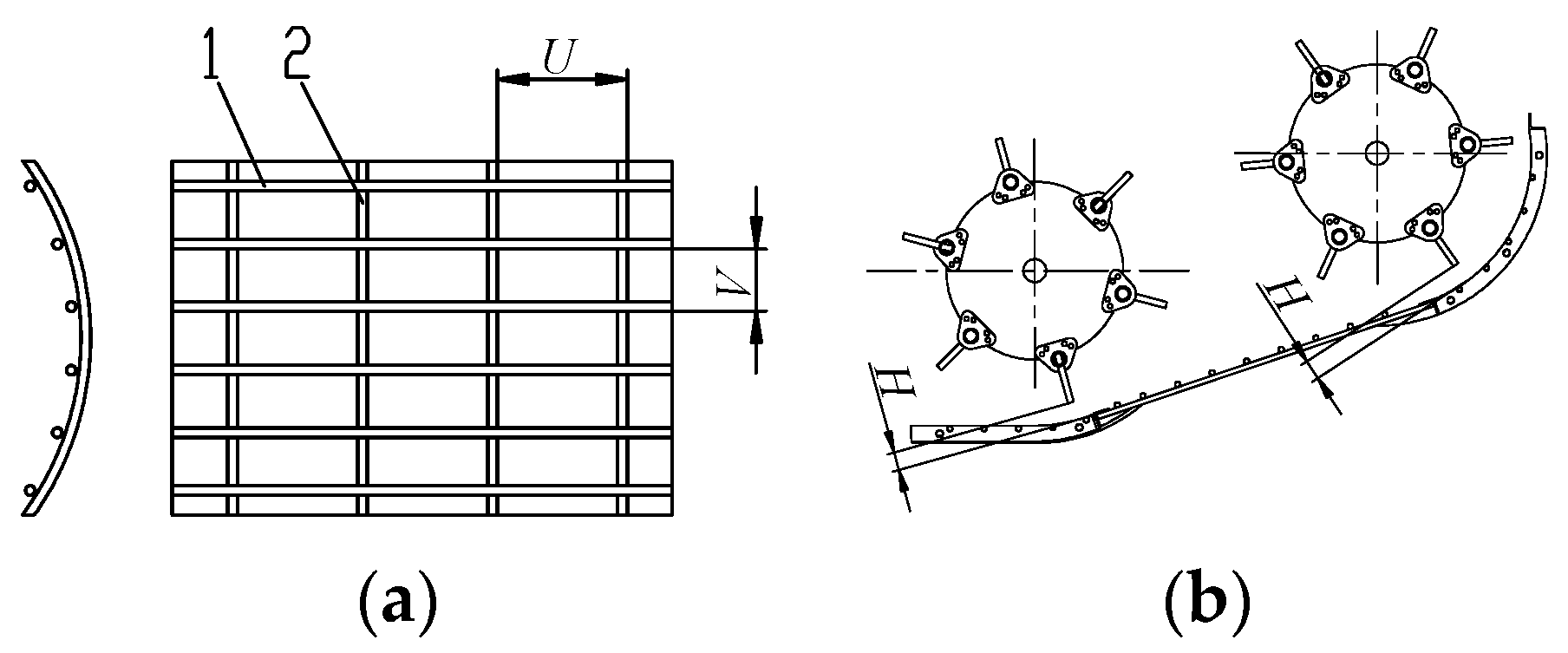
2.5. Structural Design of the Concave Screen
2.6. Analysis of Feeding Amount of Peanut Plants
2.7. Test Conditions and Instruments
2.8. Test Factors, Indexes, and Methods
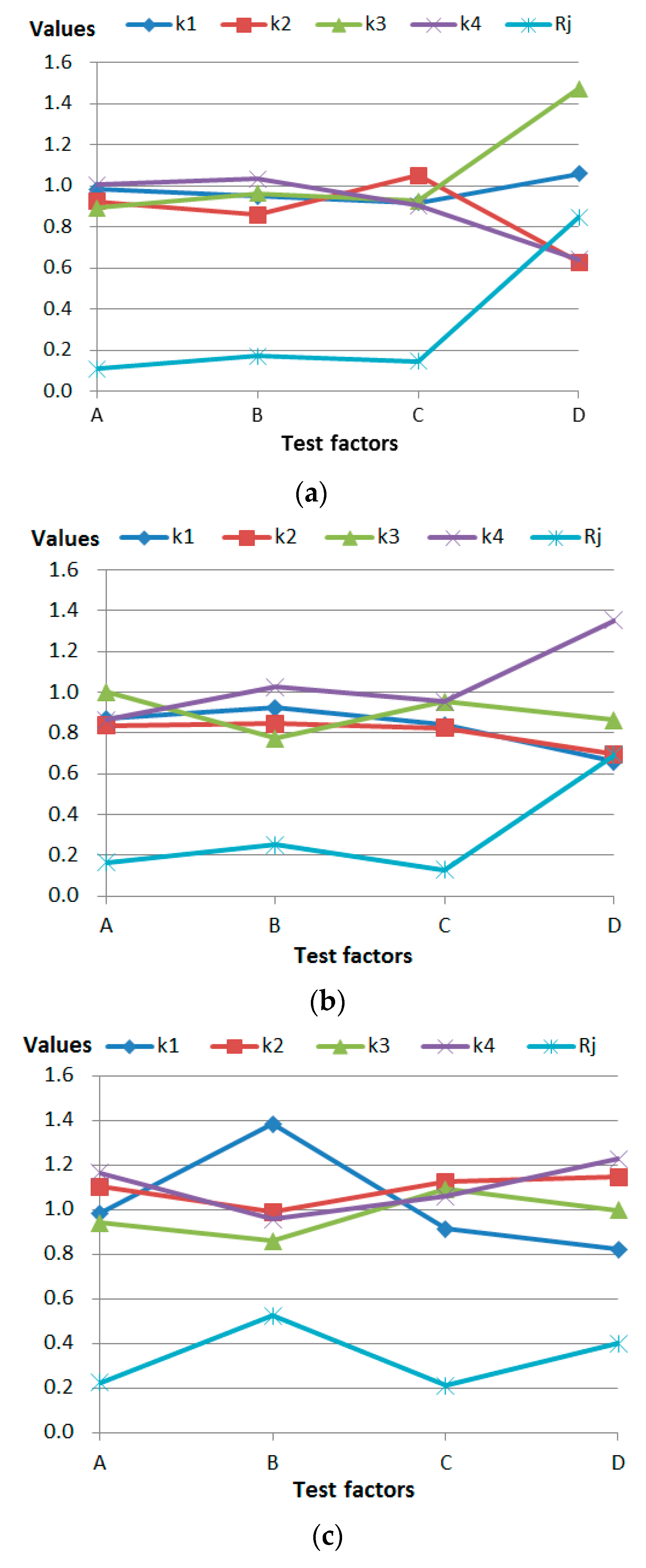
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Bureau of Statistics of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2021.
- Liao, B.S. A review on progress and prospects of peanut industry in China. Chin. J. Oil Crop Sci. 2020, 42, 161–166. [Google Scholar]
- Zheng, J.S. Design and experiment of peanut digging and placing machine based on two-stage harvest. J. Chin. Agric. Mech. 2022, 44, 133–139. [Google Scholar]
- Gao, L.X.; Chen, Z.Y.; Charles, C.; Butts, C.L. Development course of peanut harvest mechanization technology of the United States and enlightenment to China. Trans. CSAE 2017, 33, 1–9. [Google Scholar]
- Wang, D.W.; Shang, S.Q.; Han, K. Design and test of 4HJL-2 harvester for peanut picking-up and fruit-picking. Trans. CSAE 2013, 29, 27–36. [Google Scholar]
- Wang, B.K.; Hu, Z.C.; Cao, M.Z.; Zhang, P.; Yu, Z.Y.; Zhang, C. Design and test of axial-flow peanut picking and harvesting machine. Trans. CSAM 2021, 52, 98, 109–118. [Google Scholar]
- Cao, M.Z.; Hu, Z.C.; Zhang, P.; Yu, Z.Y.; Ye, J.F.; Wang, S.Y. Key technology of full-feeding peanut picking by tangential flow method. Int. J. Agric. Eng. 2019, 28, 66–74. [Google Scholar]
- Zhou, D.H. Experimental study on full-feeding picking characteristics of peanut combined harvesting. Master’s Thesis, The Chinese Academy of Agricultural Sciences, Beijing, China, 2017. [Google Scholar]
- Ivanyshyn, V.V.; Illyashyk, V.V.; Duganets, V.I. Analysis of structural features and exploitation of combine harvesters of CLAAS LEXION 750,760 TERRA TRAC on harvesting of agricultural crops. Podilian Bull. Agric. Eng. Econ. 2019, 30, 80–88. [Google Scholar] [CrossRef] [Green Version]
- Chai, X.Y.; Zhou, Y.; Xu, L.Z.; Li, Y. Effect of guide strips on the distribution of threshed outputs and cleaning losses for a tangential-longitudinal flow rice combine harvester. Biosyst. Eng. 2020, 198, 223–234. [Google Scholar] [CrossRef]
- Yang, L.Q.; Wang, W.Z.; Zhang, H.M.; Li, L.H.; Wang, M.M.; Hou, M.T. Improved design and bench test based on tangential flow-transverse axial flow maize threshing system. Trans. CSAE 2018, 34, 35–43. [Google Scholar]
- Yang, D.X.; Jiang, D.L.; Shen, Y.Z.; Gao, L.X.; Wan, L.; Wang, J. Design and test on soybean seed thresher with tangential-axial flow double-roller. Trans. CSAM 2017, 48, 102–110. [Google Scholar]
- Chinese Academy of Agricultural Mechanization Sciences. Agricultural Machinery Design Manual (PartⅡ); China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Xu, L.Z.; Li, Y.M.; Wang, C.H.; Xue, Z. A combinational threshing and separating unit of combine harvester with a transverse tangential and an axial rotor. Trans. CSAM 2014, 45, 105–108, 135. [Google Scholar]
- Guan, M.; Chen, Z.Y.; Gao, L.X.; Liu, Z.X.; Cheng, J.; Zhang, X.D. Multifunctional modular full-feeding peanut picking testing device. Trans. CSAM 2015, 46, 88–94. [Google Scholar]
- Sun, T.Z.; Shang, S.Q.; Li, G.Y.; Wang, F.Y.; Yang, R.B. Design of stripping and cleaning system of 4HQL-2 type full-feed peanut combine. J. Chin. Agric. Mech. 2009, 31, 54–57. [Google Scholar]
- Chen, Z.Y.; Guan, M.; Gao, L.X.; Chen, L.J.; Ma, F.; Dong, H.S. Design and test on axial flow peanut picking device with screw bending-tooth. Trans. CSAM 2016, 47, 106–113. [Google Scholar]
- Xu, N.; Shang, S.Q.; Wang, D.W.; He, X.N.; Gao, Z.; Liu, J.Q.; Zhang, Y.D.; Guo, P. Design and research of spike tooth type peanut picking device with longitudinal axial flow. J. Chin. Agric. Mech. 2020, 42, 197–201. [Google Scholar]
- Wang, M.; Yang, R.B.; Shang, S.Q.; Wang, F.J.; Wang, Z.Z. Design analysis and test of key equipment for fully fed peanut picking machine. J. Chin. Agric. Mech. 2021, 43, 141–145. [Google Scholar]
- Xu, T.; Shen, Y.Z.; Gao, L.X.; Zhang, X.D.; Lv, C.Y.; Liu, Z.X. Spring-finger peanut pickup mechanism based on two-stage harvest. Trans. CSAM 2016, 47, 90–97, 111. [Google Scholar]
- Wang, B.K.; Gu, F.W.; Yu, Z.Y.; Cao, M.Z.; Wang, J.T.; Hu, Z.C. Design and experiment of picking-up mechanism of axial-flow full-feed peanut harvester. Trans. CSAM 2020, 51, 132–141, 169. [Google Scholar]
- Ministry of Agriculture and Rural Affairs of the People’s Republic of China. Operating Quality for Peanut Harvesters: NY/T 502-2016; Standards Press of China: Beijing, China, 2016.
- Wu, C.Y.; Ding, W.M.; Zhang, M.; Shi, L.; Lu, Y.; Yu, S.S. Rapeseed threshing test by stages harvesting. Trans. CSAM 2010, 41, 72–76. [Google Scholar]
- Wang, S.Y.; Hu, Z.C.; Yao, L.J.; Peng, B.L.; Wang, B.; Wang, Y.W. Simulation and parameter optimisation of pickup device for full-feed peanut combine harvester. Comput. Electron. Agric. 2022, 192, 106602. [Google Scholar] [CrossRef]
- Guo, P.; Shang, S.Q.; Wang, D.W.; He, X.N.; Xu, N.; Liu, J.Q.; Yang, L.; Dong, M.M. Design and test of a trailed peanut picking and harvesting machine. J. Chin. Agric. Mech. 2021, 44, 92–97. [Google Scholar]
- Liu, Y.; Li, Y.; Chen, L.; Zhang, T.; Liang, Z.; Huang, M.; Su, Z. Study on performance of concentric threshing device with multi-threshing gaps for rice combines. Agriculture 2021, 11, 1000. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, H.M.; Hou, M.T.; He, H.; Yang, L.Q.; Wang, W.Z. Design and experiment on corn thresher with tangential-axial flow double-roller. J. Chin. Agric. Mech. 2022, 44, 45–52. [Google Scholar] [CrossRef]
- Huang, X.N. Design and Experimental Research on Tangential and Transverse Axial Flow Threshing System of Windrow Harvesting for Buckwheat; Northwest A&F University: Xianyang, China, 2020. [Google Scholar]
- Pari, L.; Latterini, F.; Stefanoni, W. Herbaceous oil crops, a review on mechanical harvesting state of the art. Agriculture 2020, 10, 309. [Google Scholar] [CrossRef]
- Wu, T.L.; Guo, H.; Yu, X.D.; Peng, B.; Liu, H.S.; Ye, X.W. Design and experiment of peanut-picking device under interplanting pattern in orchard. Agric. Res. Arid. Areas 2021, 39, 224–229. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Levels | Factors | |||
|---|---|---|---|---|
| Feeding Amount of Peanut Plant/(kg/s) | Picking Clearance/(mm) | Speed of Tangential Cylinder/(r/min) | Speed of Axial Cylinder/(r/min) | |
| 1 | 1.5 | 25 | 360 | 400 |
| 2 | 2.0 | 30 | 380 | 425 |
| 3 | 2.5 | 35 | 400 | 450 |
| 4 | 3.0 | 40 | 420 | 475 |
| Test No. | A | B | C | D | yp/% | yj/% | ys/% |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 1.09 | 0.61 | 0.98 |
| 2 | 1 | 2 | 2 | 2 | 0.66 | 0.58 | 1.14 |
| 3 | 1 | 3 | 3 | 3 | 1.46 | 0.79 | 0.74 |
| 4 | 1 | 4 | 4 | 4 | 0.72 | 1.50 | 1.07 |
| 5 | 2 | 1 | 2 | 3 | 1.56 | 0.75 | 1.46 |
| 6 | 2 | 2 | 1 | 4 | 0.46 | 1.20 | 1.04 |
| 7 | 2 | 3 | 4 | 1 | 0.99 | 0.57 | 0.74 |
| 8 | 2 | 4 | 3 | 2 | 0.69 | 0.83 | 1.17 |
| 9 | 3 | 1 | 3 | 4 | 0.55 | 1.58 | 1.54 |
| 10 | 3 | 2 | 4 | 3 | 1.31 | 0.98 | 0.86 |
| 11 | 3 | 3 | 1 | 2 | 0.56 | 0.61 | 0.71 |
| 12 | 3 | 4 | 2 | 1 | 1.15 | 0.84 | 0.65 |
| 13 | 4 | 1 | 4 | 2 | 0.60 | 0.76 | 1.56 |
| 14 | 4 | 2 | 3 | 1 | 1.01 | 0.62 | 0.92 |
| 15 | 4 | 3 | 2 | 4 | 0.84 | 1.13 | 1.25 |
| 16 | 4 | 4 | 1 | 3 | 1.57 | 0.94 | 0.93 |
| Indexes | Variance Source | Sum of Squares | Free Degree | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| yp | A | 0.032 | 3 | 3.453 | 0.1680 | |
| B | 0.060 | 3 | 6.493 | 0.0794 | * | |
| C | 0.056 | 3 | 6.008 | 0.0875 | * | |
| D | 1.945 | 3 | 209.717 | 0.0006 | *** | |
| Error | 0.009 | 3 | ||||
| yj | A | 0.066 | 3 | 14.012 | 0.0286 | ** |
| B | 0.141 | 3 | 29.959 | 0.0098 | *** | |
| C | 0.059 | 3 | 12.560 | 0.0332 | ** | |
| D | 1.222 | 3 | 258.897 | 0.0004 | *** | |
| Error | 0.005 | 3 | ||||
| yj | A | 0.130 | 3 | 7.308 | 0.0683 | * |
| B | 0.644 | 3 | 36.062 | 0.0075 | *** | |
| C | 0.103 | 3 | 5.756 | 0.0923 | * | |
| D | 0.377 | 3 | 21.095 | 0.0161 | ** | |
| Error | 0.018 | 3 |
| Test No. | Membership Degree of Non-Picking Loss Rate (r1n) | Membership Degree of Entrainment Loss Rate (r2n) | Membership Degree of Damage Rate (r3n) | Fuzzy Comprehensive Evaluation Values (Mn) |
|---|---|---|---|---|
| 1 | 0.432 | 0.960 | 0.637 | 0.684 |
| 2 | 0.820 | 0.990 | 0.462 | 0.816 |
| 3 | 0.099 | 0.782 | 0.901 | 0.533 |
| 4 | 0.766 | 0.079 | 0.538 | 0.446 |
| 5 | 0.009 | 0.822 | 0.110 | 0.354 |
| 6 | 1.000 | 0.376 | 0.571 | 0.665 |
| 7 | 0.523 | 1.000 | 0.901 | 0.789 |
| 8 | 0.793 | 0.743 | 0.429 | 0.700 |
| 9 | 0.919 | 0.000 | 0.022 | 0.372 |
| 10 | 0.234 | 0.594 | 0.769 | 0.485 |
| 11 | 0.910 | 0.960 | 0.934 | 0.935 |
| 12 | 0.378 | 0.733 | 1.000 | 0.644 |
| 13 | 0.874 | 0.812 | 0.000 | 0.674 |
| 14 | 0.505 | 0.950 | 0.703 | 0.723 |
| 15 | 0.658 | 0.446 | 0.341 | 0.510 |
| 16 | 0.000 | 0.634 | 0.692 | 0.392 |
| Indexes | Factors | ||||
|---|---|---|---|---|---|
| A | B | C | D | ||
| Mn | k1 | 0.620 | 0.521 | 0.669 | 0.710 |
| k2 | 0.627 | 0.672 | 0.581 | 0.781 | |
| k3 | 0.609 | 0.692 | 0.582 | 0.441 | |
| k4 | 0.575 | 0.546 | 0.599 | 0.498 | |
| Rj | 0.052 | 0.171 | 0.088 | 0.340 | |
| Structure Type of Peanut Picking Device | Sources | Performance Indexes | ||
|---|---|---|---|---|
| Non-Picking Loss Rate (%) | Entrainment Loss Rate (%) | Damage Rate (%) | ||
| Tangential-axial flow | This study | 0.52 | 0.54 | 0.75 |
| Multi-stage tangential flow | Ref. [7] | 1.56 | 1.23 | 3.85 |
| Ref. [8] | 3.20 | 1.68 | 4.91 | |
| Ref. [30] | 2.13 | / | 1.75 | |
| Single axial flow | Ref. [18] | 0.94 | / | 0.93 |
| Ref. [19] | 1.84 | / | 1.41 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Cao, M.; Wang, B.; Hu, Z.; Xu, H.; Wang, S.; Yu, Z. Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture 2022, 12, 179. https://doi.org/10.3390/agriculture12020179
Yang H, Cao M, Wang B, Hu Z, Xu H, Wang S, Yu Z. Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture. 2022; 12(2):179. https://doi.org/10.3390/agriculture12020179
Chicago/Turabian StyleYang, Hongguang, Mingzhu Cao, Bing Wang, Zhichao Hu, Hongbo Xu, Shenying Wang, and Zhaoyang Yu. 2022. "Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting" Agriculture 12, no. 2: 179. https://doi.org/10.3390/agriculture12020179
APA StyleYang, H., Cao, M., Wang, B., Hu, Z., Xu, H., Wang, S., & Yu, Z. (2022). Design and Test of a Tangential-Axial Flow Picking Device for Peanut Combine Harvesting. Agriculture, 12(2), 179. https://doi.org/10.3390/agriculture12020179