
Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter


Abstract
1. Introduction
2. Materials and Methods
2.1. Seedlings and Seedling Tray
2.2. Seedling Picking Mechanism and Principle
2.3. Seedling Feeding Mechanism and Principle
2.4. Logic Execution Function Design
3. Seedling Selective Planting System
3.1. Image Acquisition Sense
3.2. Image Preprocessing
3.3. Image Segmentation Based on FCM
3.4. Visual Identification of Seedlings
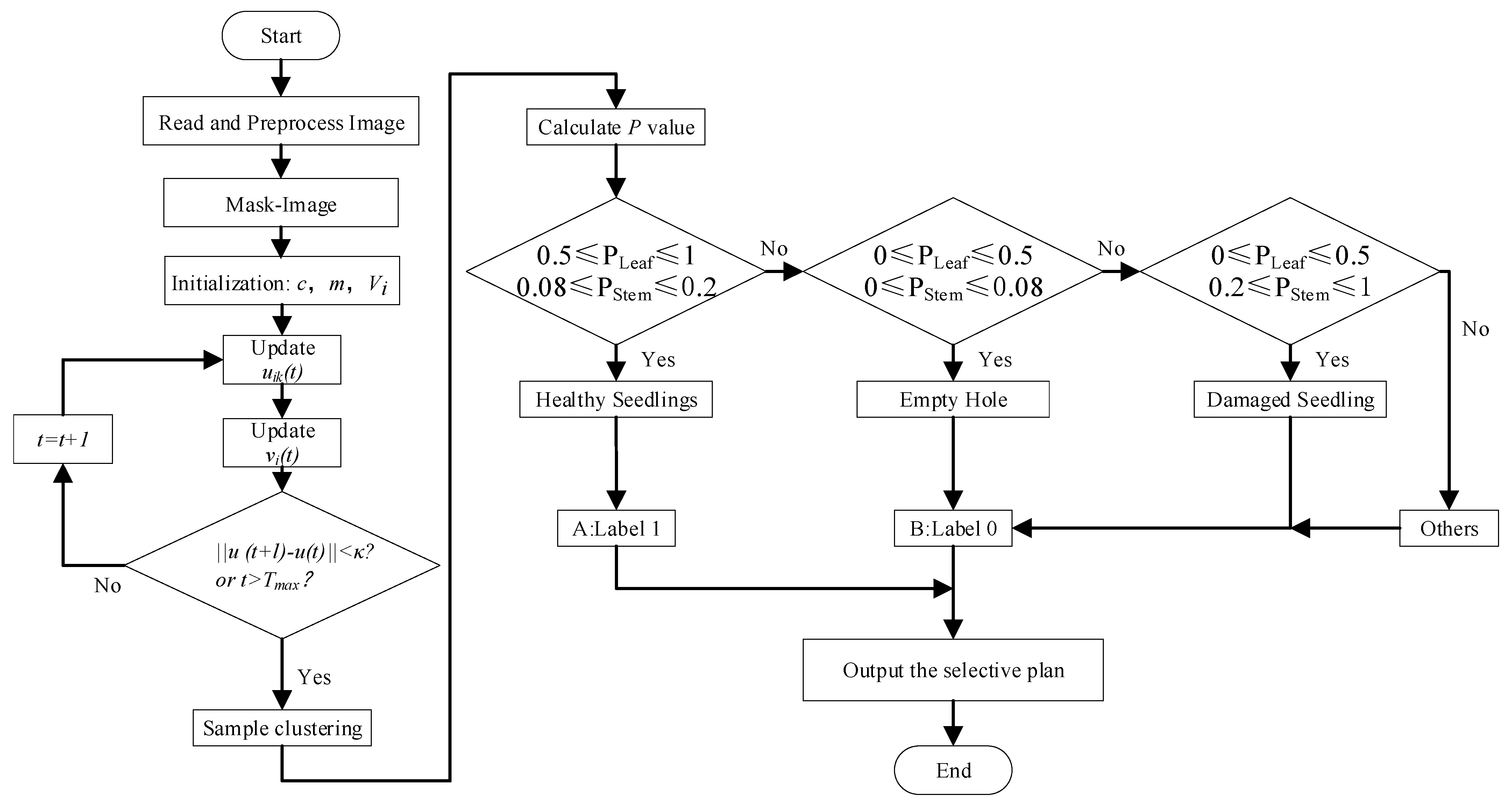
- Step 1: The seedling image and preprocessing such as image cropping and compression are read;
- Step 2: Image mask operation, ROI region extracted;
- Step 3: Parameters such as c, m, and vi initialized, and the image feature segmented;
- Step 4: The membership of the cluster center uik and cluster center vi updated;
- Step 5: It is determined whether the optimal conditions or the maximum number of iterations are met, and one of the two is met, then Step 6 is executed; otherwise, return to Step 4 follows;
- Step 6: The threshold P of each ROI region calculated, the seedlings and labels identified;
- Step 7: Seedling selective plan identified and output.
4. Results and Discussions
4.1. Seedling Identification Test
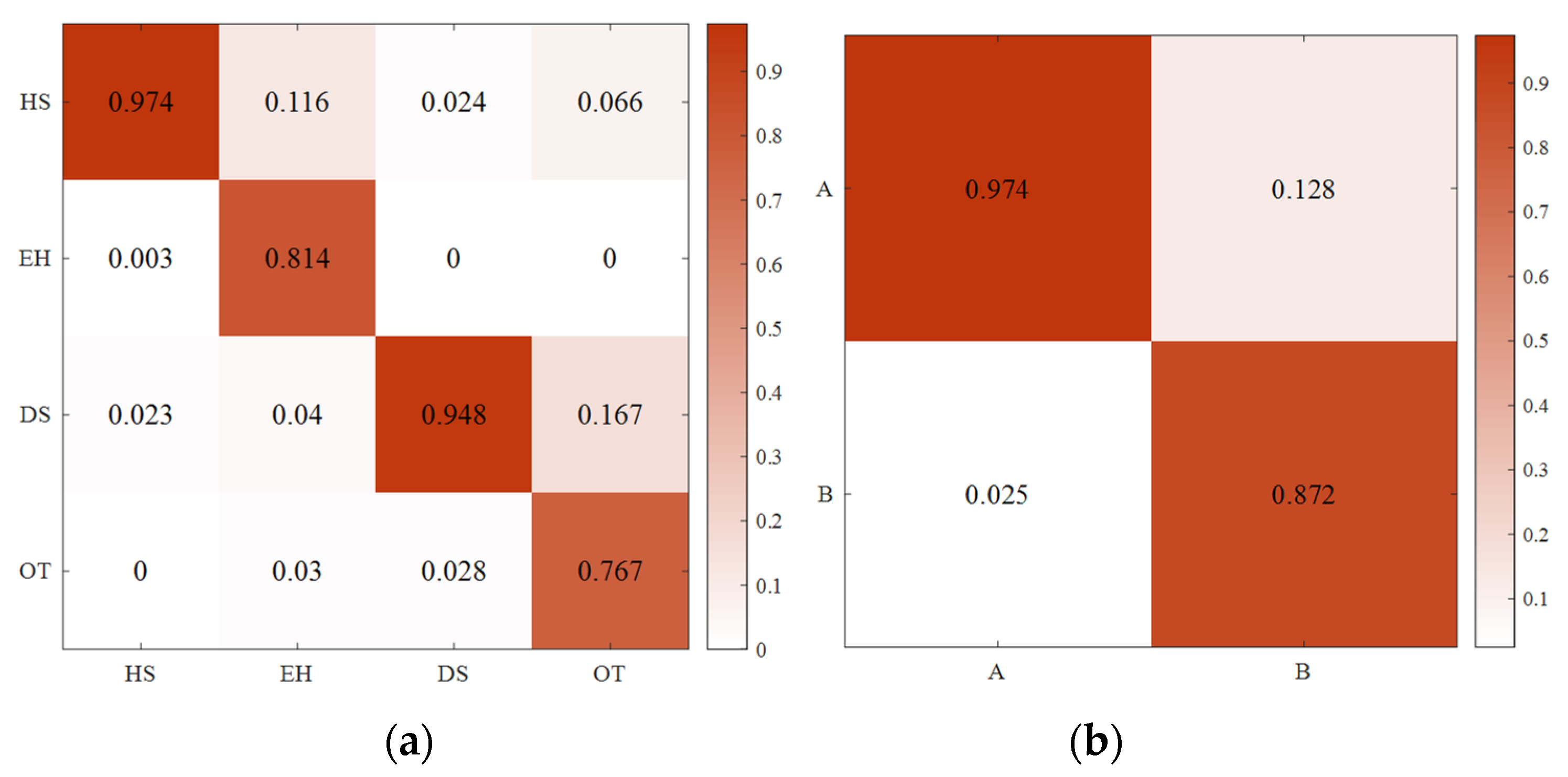
4.1.1. Result of Seedling Identification
4.1.2. Discussion
4.2. Experiment of Seedling Selective Planting
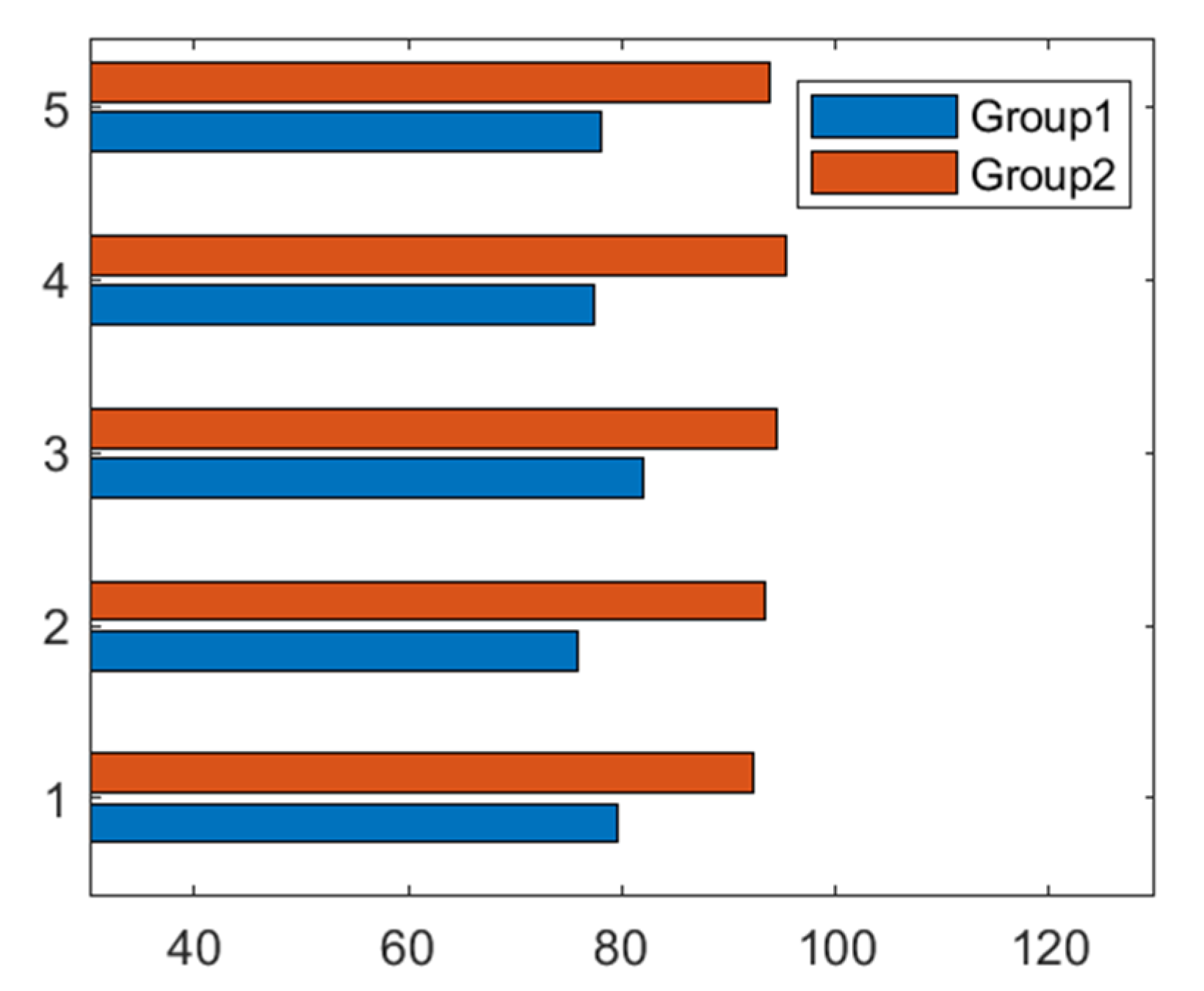
4.2.1. Result of the Selective Planting Experiment
4.2.2. Discussion
- The selective planting system is an interactive system of seedlings, mechanical and visual control, has the agronomic integration attributes of agricultural machinery. Therefore, the growth morphology of seedlings is an important factor in improving the effect of selective transplanting [24], screen the combination of seedlings parameters suitable for selective planting, such as seedling age (leaf stretch), stem mechanical properties (moisture content), etc., and reduce the systematic misjudgment caused by leaf crossing.
- The misidentification of HS by selective planting system will cause waste of resources. The seedlings waste rate indicator should also be considered in the design and optimization of the system, as defined as follows:
5. Conclusions
- Based on the idea of humanoid selective transplanting, selecting suitable seedlings for transplanting and improving the efficiency of transplanting, this paper constructs a seedling selective planting control system applicable to vegetable transplanters. The seedling picking mechanism and seedling feeding mechanism are designed, and the selective planting scheme is proposed by combining machine vision and logic control technology.
- A fast framework of tray hole location and seedling identification (FHLSI) is proposed for the fast and accurate identification requirements of selective planting under transplanter working conditions. The visual recognition scene suitable for transplanting conditions is constructed using asymmetric light and the crossover of the CCD camera’s field of view, effectively suppressing background interference. A selective planting control system for seedlings was designed based on the intersection of mask and image operations combined with the FCM segmentation algorithm.
- The test results show that the proposed visual identification method achieves an average accuracy of 92.35% under working conditions, with a 15.4% improvement in transplanting quality with the seedling selective planting control system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, H.; Li, Z.; Dong, W.; Cao, X.; Wen, Z.; Xiao, R.; Wei, Y.; Zeng, H.; Ma, X. An automatic approach for detecting seedlings per hill of machine-transplanted hybrid rice utilizing machine vision. Comput. Electron. Agric. 2021, 185, 106178. [Google Scholar] [CrossRef]
- Gu, S.; Xie, Z.; Jiang, D.; Chu, Q.; Yang, Y.; Fan, K.; Yang, Y. Separating collected seedlings using subdivided air streams. Biosyst. Eng. 2020, 19, 172–184. [Google Scholar] [CrossRef]
- Shao, Y.; Han, X.; Xuan, G.; Liu, Y.; Gao, C.; Wang, G.; Hu, Z. Development of a multi-adaptive feeding device for automated plug seedling transplanter. Int. J. Agric. Biol. Eng. 2021, 14, 96–97. [Google Scholar] [CrossRef]
- Yang, T.; Ye, J.; Zhou, S.; Xu, A.; Yin, J. 3D reconstruction method for tree seedlings based on point cloud self-registration. Comput. Electron. Agric. 2022, 200, 107210. [Google Scholar] [CrossRef]
- Jin, X.; Tang, L.; Ji, J.; Wang, C.; Wang, S. Potential analysis of an automatic transplanting method for healthy potted seedlings using computer vision. Int. J. Agric. Biol. Eng. 2021, 14, 162–168. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, L.; Huang, X.; Yuan, T.; Zhang, J.; Tan, Y.; Feng, Z. Design of and Experiment with Seedling Selection System for Automatic Transplanter for Vegetable Plug Seedlings. Agronomy 2021, 11, 2031. [Google Scholar] [CrossRef]
- Suo, R.; Fu, L.; He, L.; Li, G.; Majeed, Y.; Liu, X.; Zhao, G.; Yang, R.; Li, R. A novel labeling strategy to improve apple seedling segmentation using BlendMask for online grading. Comput. Electron. Agric. 2022, 201, 107333. [Google Scholar] [CrossRef]
- Tabinda, N.S.; Liu, J.; Zhou, X.; Zhao, S.; Yuan, Y.; Sami, H.A.M.; Imran, A.L. Seedling-lump integrated non-destructive monitoring for automatic transplanting with Intel RealSense depth camera. Artif. Intell. Agric. 2019, 3, 18–32. [Google Scholar] [CrossRef]
- McGuinness, B.; Duke, M.; Au, C.K.; Lim, S.H. Measuring radiata pine seedling morphological features using a machine vision system. Comput. Electron. Agric. 2021, 189, 106355. [Google Scholar] [CrossRef]
- Zhang, L.N.; Tan, Y.; Jiang, Y.Y.; Wang, S. Automatic Detection Method for Late Emergence Seedlings in Plug Trays Based on Point Cloud Processing. Trans. Chin. Soc. Agric. Mach. 2022, 53, 261–269. [Google Scholar] [CrossRef]
- Wang, J.Z.; Gu, R.R.; Sun, L.; Zhang, Y. Non-destructive Monitoring of Plug Seedling Growth Process Based on Kinect Camera. Trans. Chin. Soc. Agric. Mach. 2021, 52, 227–235. [Google Scholar] [CrossRef]
- Benoit, L.; Rousseau, D.; Belin, T.; Demilly, D.; Chapeau-Blondeau, F. Simulation of image acquisition in machine vision dedicated to seedling elongation to validate image processing root segmentation algorithms. Comput. Electron. Agric. 2014, 104, 84–92. [Google Scholar] [CrossRef]
- Jin, X.; Tang, L.; Li, R.; Zhao, B.; Ji, J.; Ma, Y. Edge recognition and reduced transplantation loss of leafy vegetable seedlings with Intel RealsSense D415 depth camera. Comput. Electron. Agric. 2022, 198, 107030. [Google Scholar] [CrossRef]
- Tong, J.H.; Shi, H.F.; Wu, C.Y.; Jiang, H.Y.; Yang, T.W. Skewness correction and quality evaluation of plug seedling images based on Canny operator and Hough transform. Comput. Electron. Agric. 2018, 155, 461–472. [Google Scholar] [CrossRef]
- Hong, Z.J.; Li, Y.M.; Lin, H.Z.; Gong, L.; Liu, C.L. Field Boundary Distance Detection Method in Early Stage of Planting Based on Binocular Vision. Trans. Chin. Soc. Agric. Mach. 2022, 53, 27–33. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Robertson, J.S. DeepSeedling: Deep convolutional network and Kalman filter for plant seedling detection and counting in the field. Plant Methods 2019, 15, 141. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Li, R.; Ji, J.; Yuan, Y.; Li, M. Obstacle avoidance transplanting method on Kinect visual processing. Int. J. Agric. Biol. Eng. 2021, 14, 72–78. [Google Scholar] [CrossRef]
- Tu, K.L.; Li, L.J.; Yang, L.M.; Wang, J.H.; Sun, Q. Selection for high quality pepper seeds by machine vision and classifiers. J. Integr. Agric. 2018, 17, 1999–2006. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, L.; Shi, X.; Ibrar, A.; Mao, H.; Hu, J.; Han, L. Design of seedlings separation device with reciprocating movement seedling cups and its controlling system of the full-automatic plug seedling transplanter. Comput. Electron. Agric. 2018, 147, 131–145. [Google Scholar] [CrossRef]
- Hu, Q.; Zhang, Q.; Li, X.; Wan, X.; Wang, L.; Liao, Q. Design and parameter analysis of seedling collection device of rapeseed substrate block seedlings transplanter machine. Trans. Chin. Soc. Agric. Eng. 2021, 37, 18–27. [Google Scholar] [CrossRef]
- Magar, A.P.; Nandede, B.M.; Chilur, R.; Gaikwad, B.B.; Khadatkar, A. Optimization of growing media and pot size for vegetable seedlings grown in cylindrical paper pots using response surface methodology. J. Plant Nutr. 2022, 45, 1712–1721. [Google Scholar] [CrossRef]
- Jin, X.; Yuan, Y.; Ji, J.; Zhao, K.; Li, M.; Chen, K. Design and implementation of anti-leakage planting system for transplanting machine based on fuzzy information. Comput. Electron. Agric. 2020, 169, 105204. [Google Scholar] [CrossRef]
- Tong, J.; Yu, J.; Wu, C.; Yu, G.; Du, X.; Shi, H. Health information acquisition and position calculation of plug seedling in greenhouse seedling bed. Comput. Electron. Agric. 2021, 185, 106146. [Google Scholar] [CrossRef]
- Perugachi-Diaz, Y.; Tomczak, J.M.; Bhulai, S. Deep learning for white cabbage seedling prediction. Comput. Electron. Agric. 2021, 184, 106059. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Picking Cylinder | Feeding Cylinder |
|---|---|---|
| Cylinder bore/mm | 25 | 16 |
| Maximum open/mm | 28 | / |
| Travel/mm | / | 150 |
| Maximum push/kg | 6 | 8 |
| Piston rod thread/mm | M5 | M5 |
| Maximum clamp/kg | 3 | / |
| Speed range/mm·s−1 | / | 50–750 |
| Type | Leaf ROI (PLeaf) | Stem ROI (PStem) | Real Image |
|---|---|---|---|
| A | 0.5 ≤ P ≤ 1 | 0.08 ≤ P ≤ 0.2 | Healthy Seedling |
| B | 0 ≤ P ≤ 0.5 | 0 ≤ P ≤ 0.08 | Empty Hole |
| 0.2 ≤ P ≤ 1 | Damaged Seedling |
| Characteristics | Actual Class | Predict Class | Accuracy/% |
|---|---|---|---|
| HS | 970 | 945 | 97.4 |
| EH | 500 | 407 | 81.4 |
| DS | 420 | 398 | 94.8 |
| OT | 30 | 23 | 76.7 |
| Planting Status | Test Number | Seedling Feeding Number | Quality Qualified Number | Planting Qualified Rate/% |
|---|---|---|---|---|
| Group 1 | 1 | 128 | 102 | 79.6 |
| 2 | 128 | 97 | 75.8 | |
| 3 | 128 | 105 | 82.0 | |
| 4 | 128 | 99 | 77.3 | |
| 5 | 128 | 100 | 78.1 | |
| Average: | 78.5 | |||
| Group 2 | 1 | 103 | 95 | 92.2 |
| 2 | 108 | 101 | 93.5 | |
| 3 | 112 | 106 | 94.6 | |
| 4 | 109 | 104 | 95.4 | |
| 5 | 114 | 107 | 93.8 | |
| Average: | 93.9 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Xiao, L.; Ma, X.; Yang, F.; Jin, X.; Ji, J. Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter. Agriculture 2022, 12, 2064. https://doi.org/10.3390/agriculture12122064
Li M, Xiao L, Ma X, Yang F, Jin X, Ji J. Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter. Agriculture. 2022; 12(12):2064. https://doi.org/10.3390/agriculture12122064
Chicago/Turabian StyleLi, Mingyong, Liqiang Xiao, Xiqiang Ma, Fang Yang, Xin Jin, and Jiangtao Ji. 2022. "Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter" Agriculture 12, no. 12: 2064. https://doi.org/10.3390/agriculture12122064
APA StyleLi, M., Xiao, L., Ma, X., Yang, F., Jin, X., & Ji, J. (2022). Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter. Agriculture, 12(12), 2064. https://doi.org/10.3390/agriculture12122064