
A Design of an Unmanned Electric Tractor Platform

Abstract
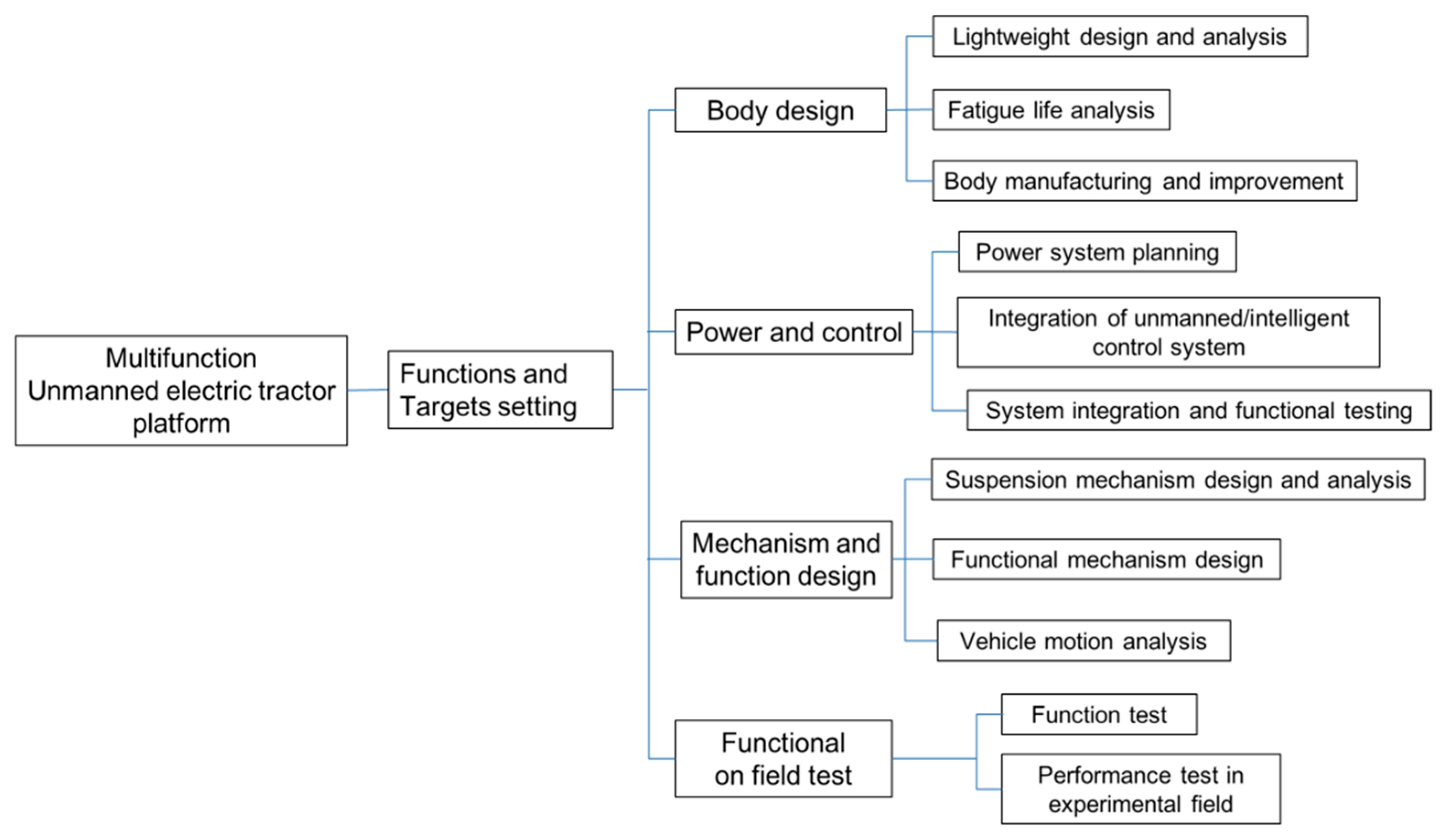
:1. Introduction
2. Materials and Methods
3. Body Design
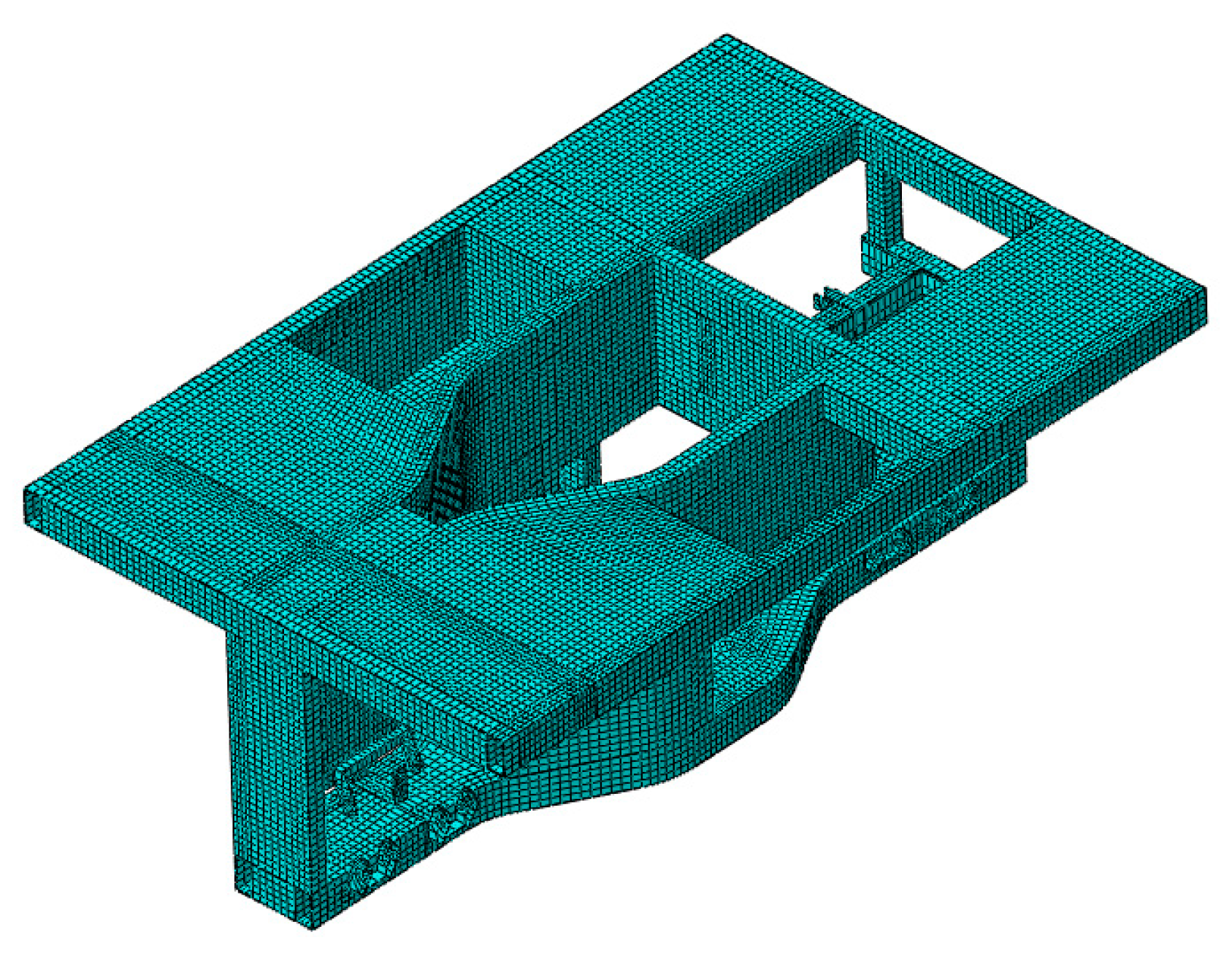
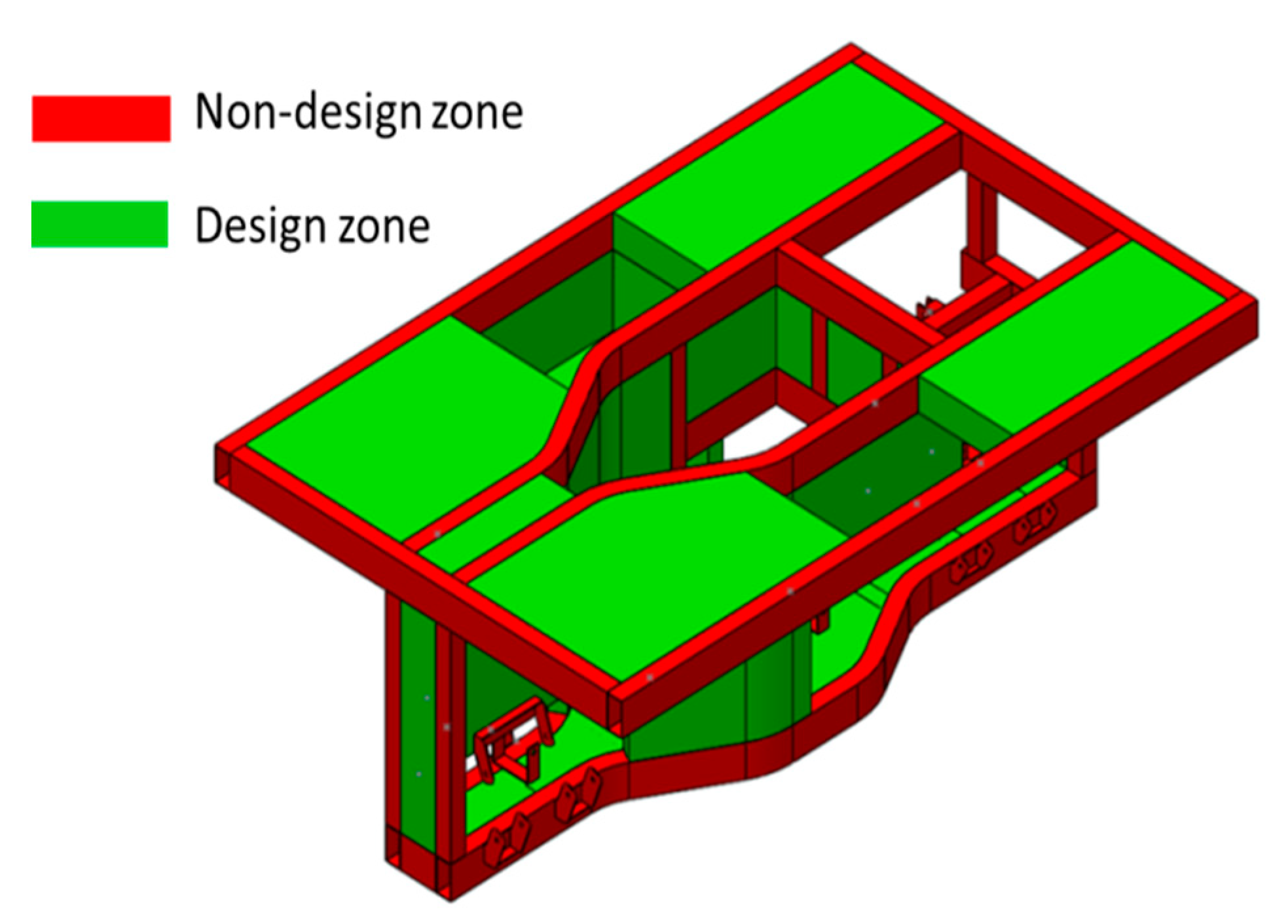
3.1. Lightweight Design and Analysis of Car Body
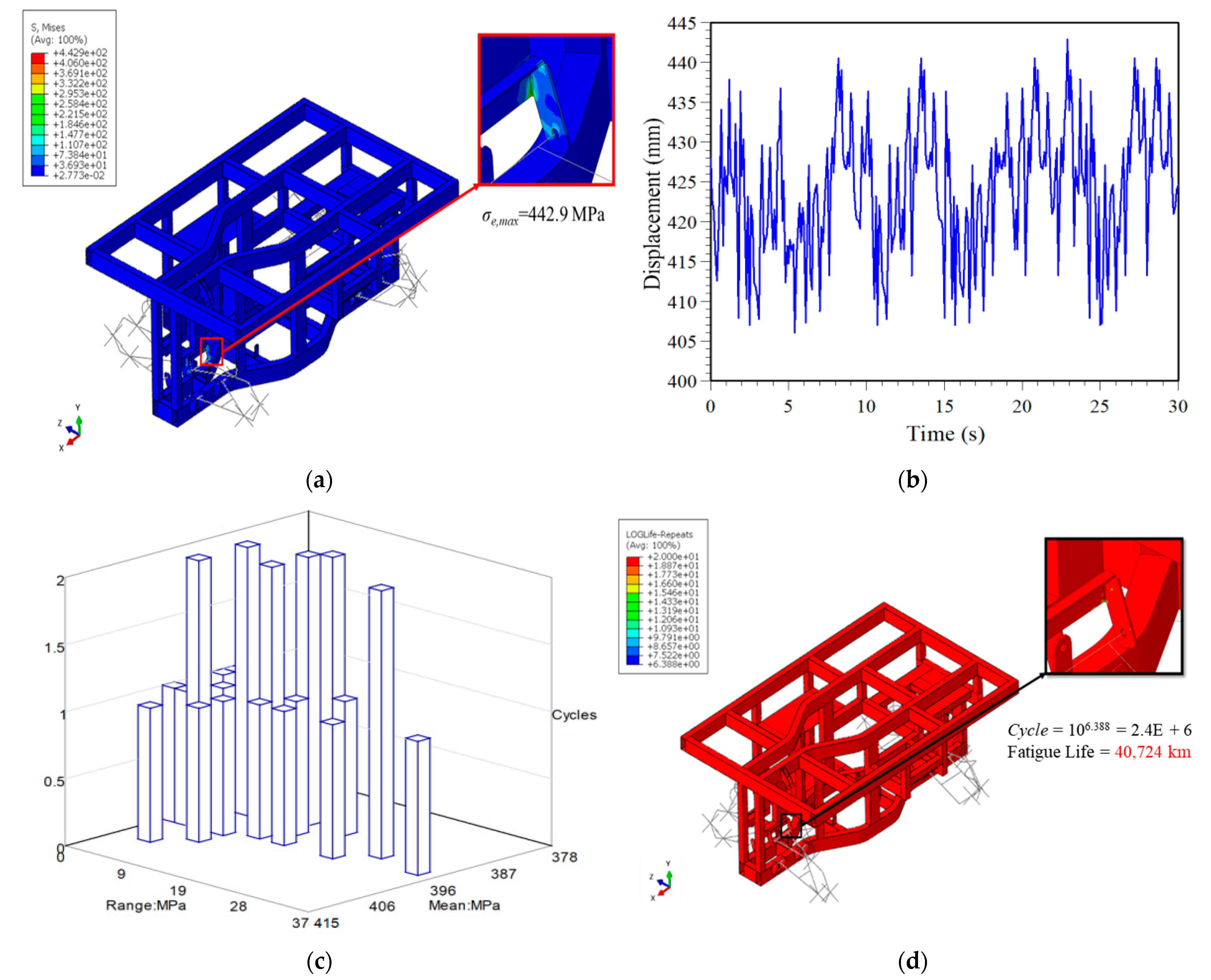
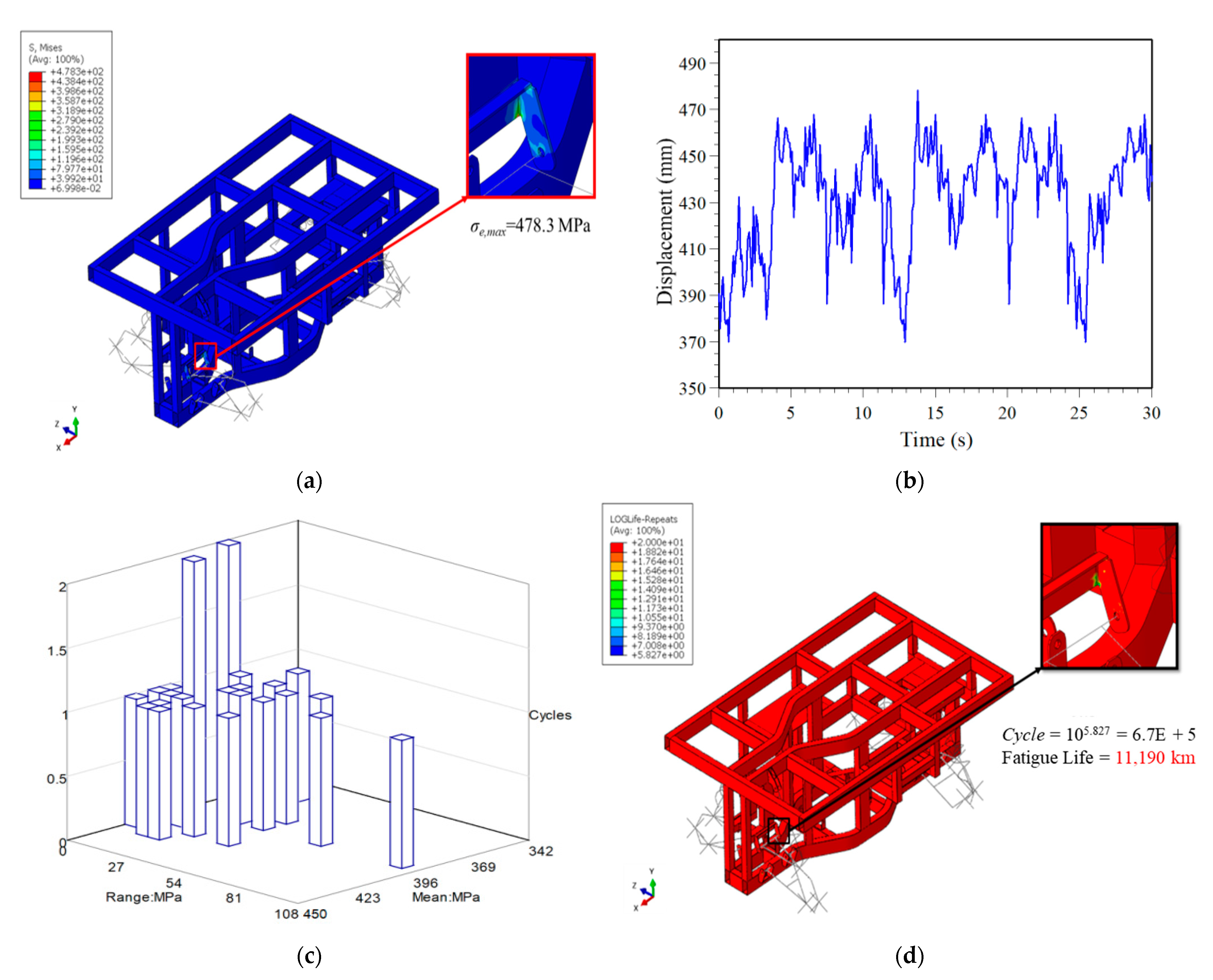
3.2. Fatigue Life Analysis
- A.
- Material parameters
- B.
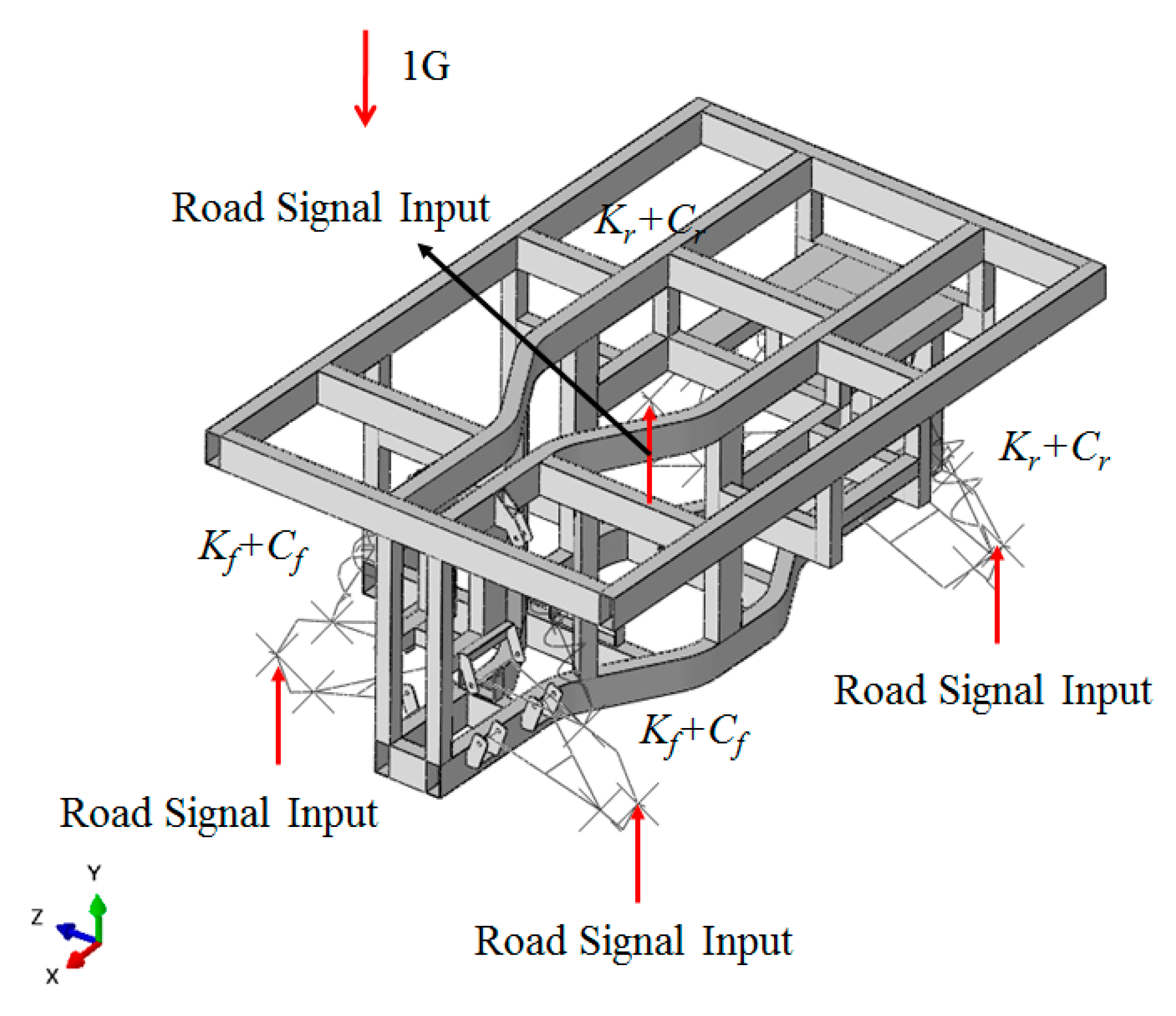
- Loading conditions
- C.
- Boundary conditions
4. Power and System Integration
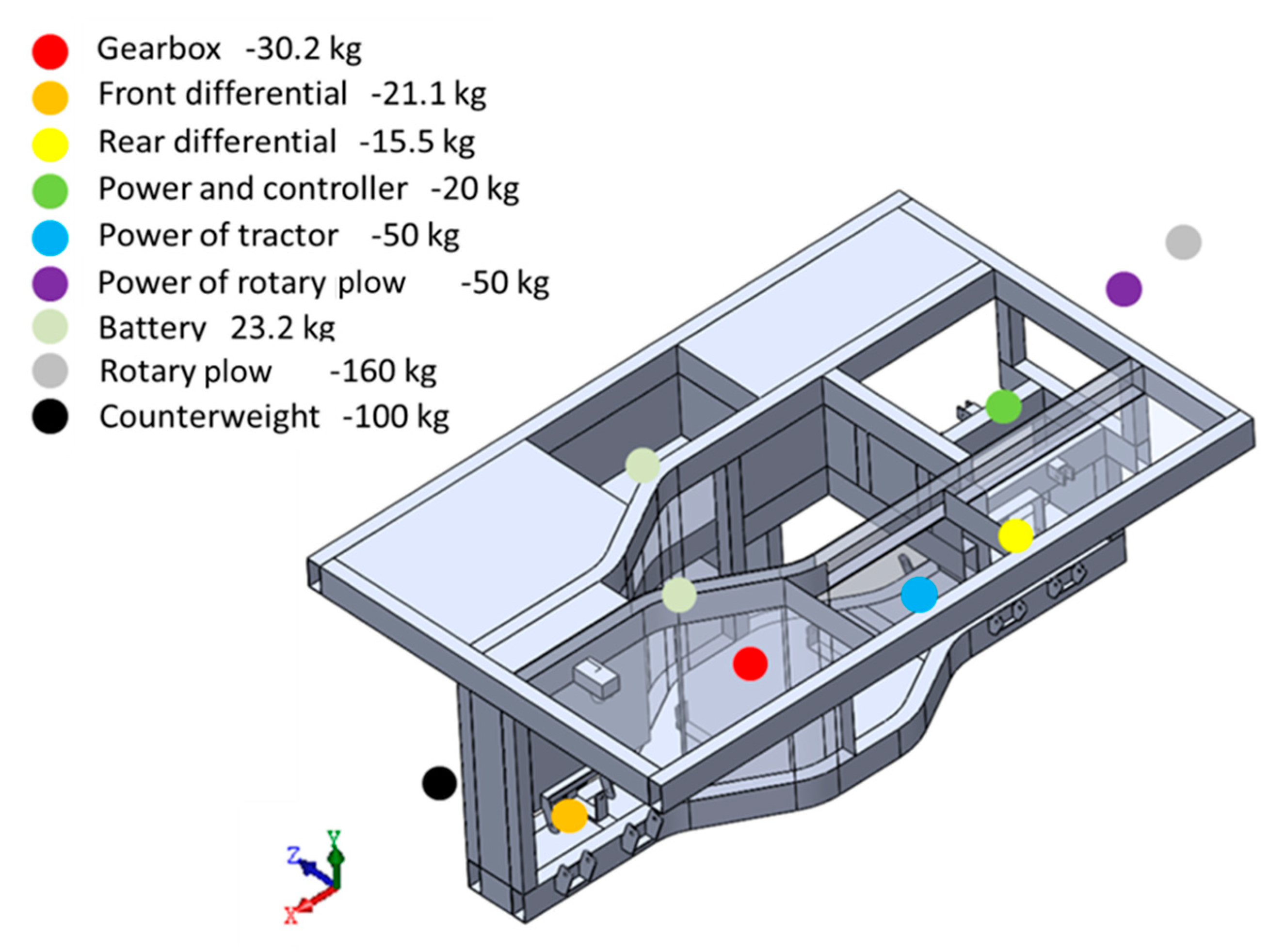
4.1. Force Estimate and Power System Planning
4.1.1. Force Estimate
= 0.68 × 7222.8 + 0.12 × (6474.6 + 0.74 × 7222.8)
= 6329.8 N
4.1.2. Power System Planning
- (1)
- Transportation operations
- (2)
- Rotary tillage operations
4.1.3. Reducer Selection
- (1)
- Transportation operations
- (2)
- Rotary tillage operations
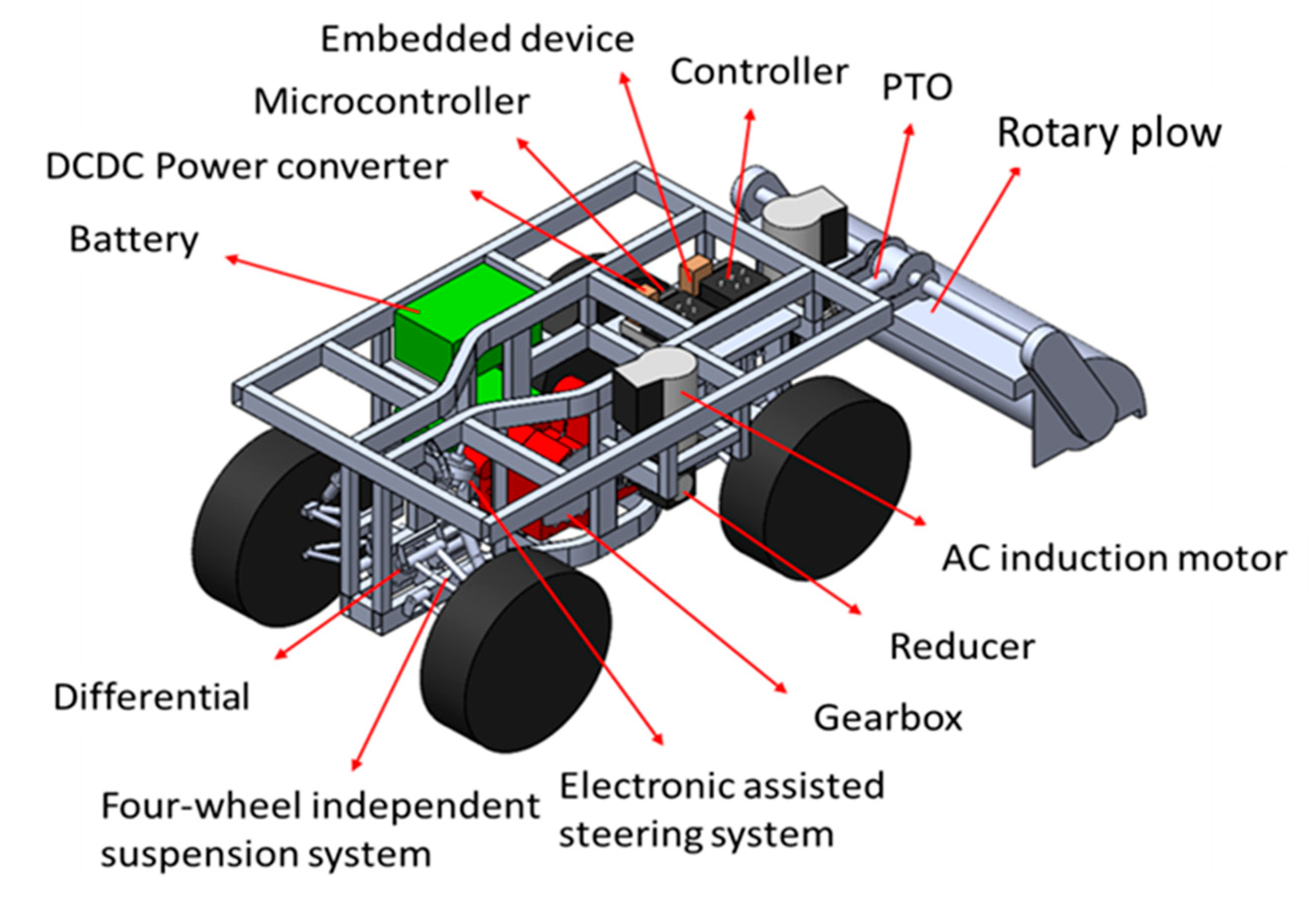
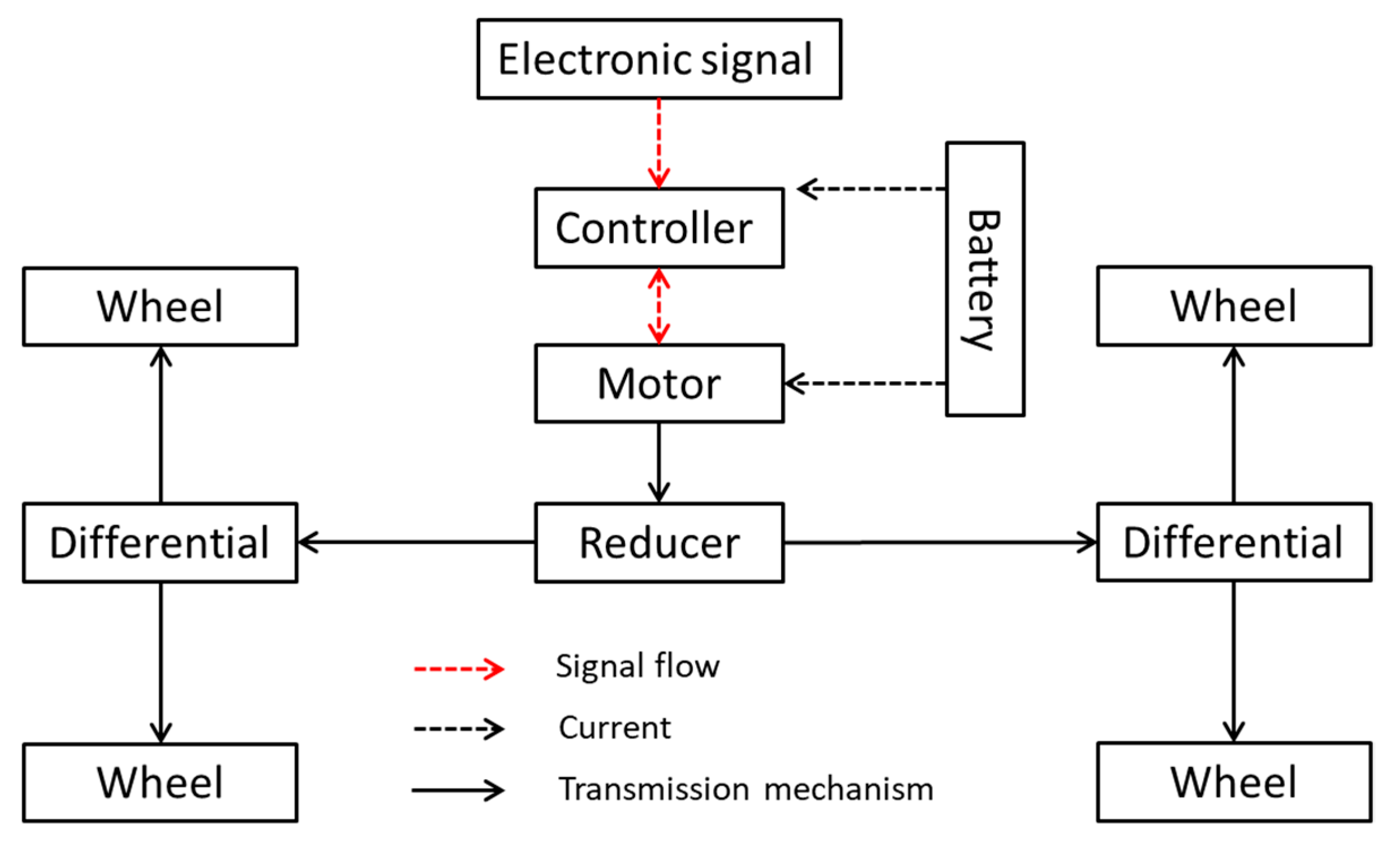
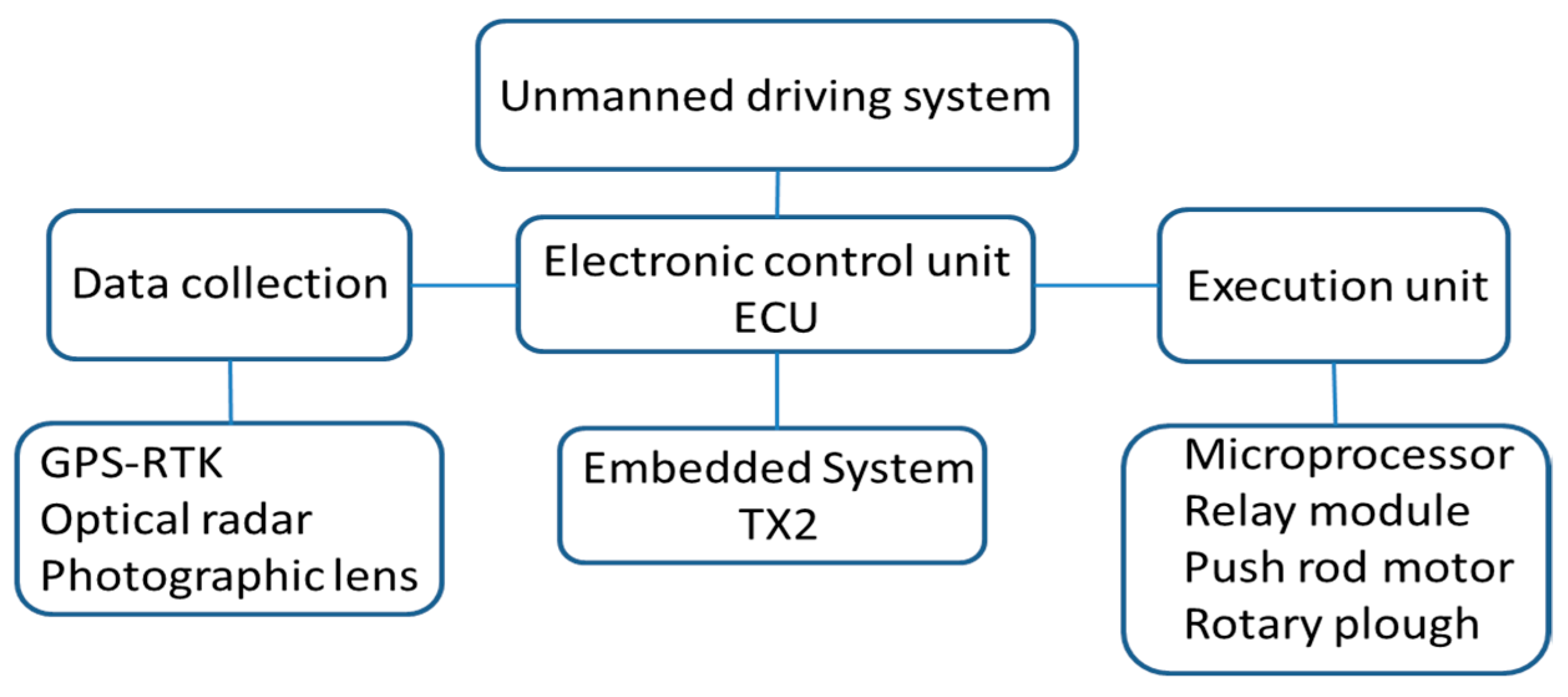
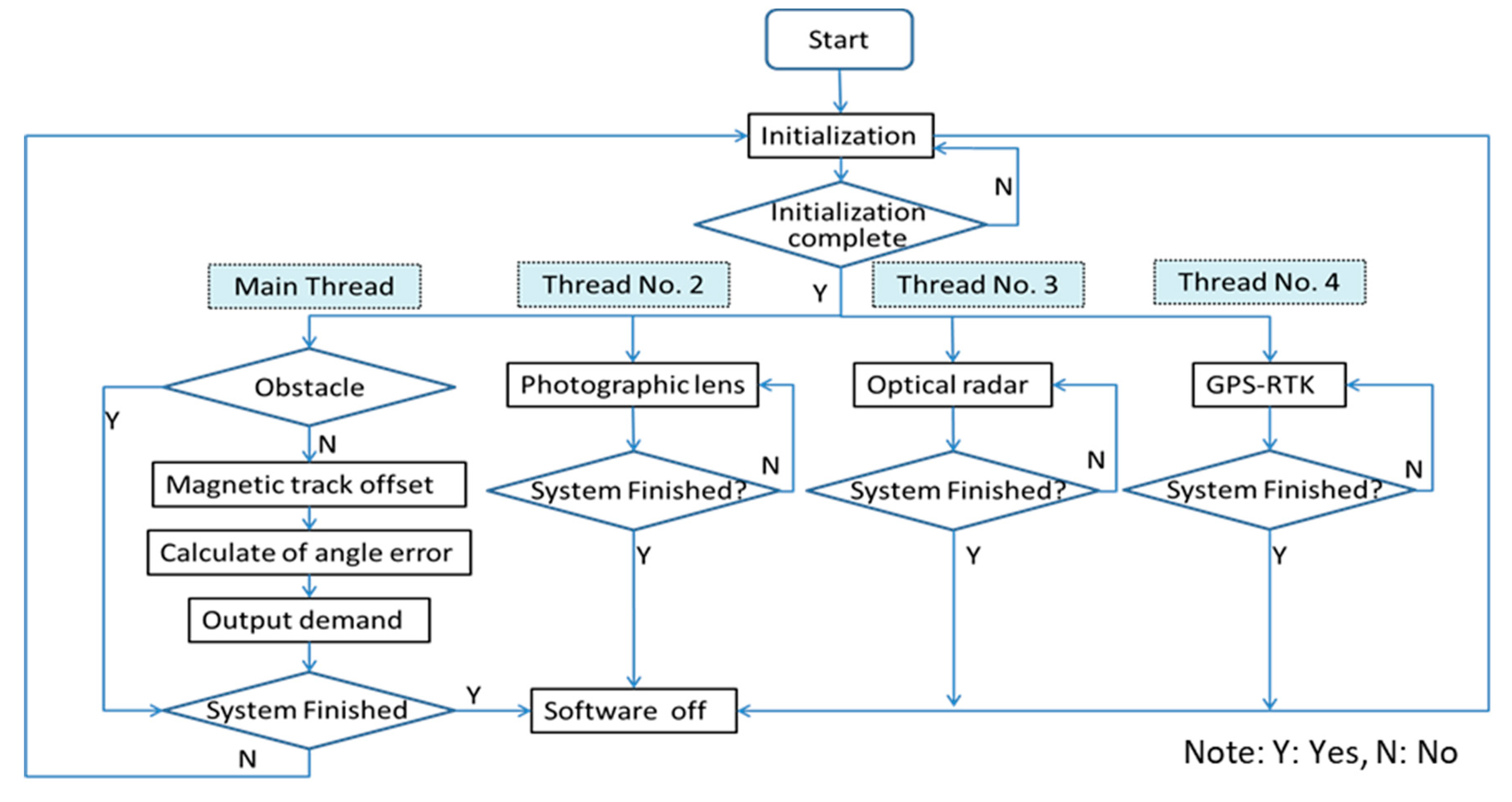
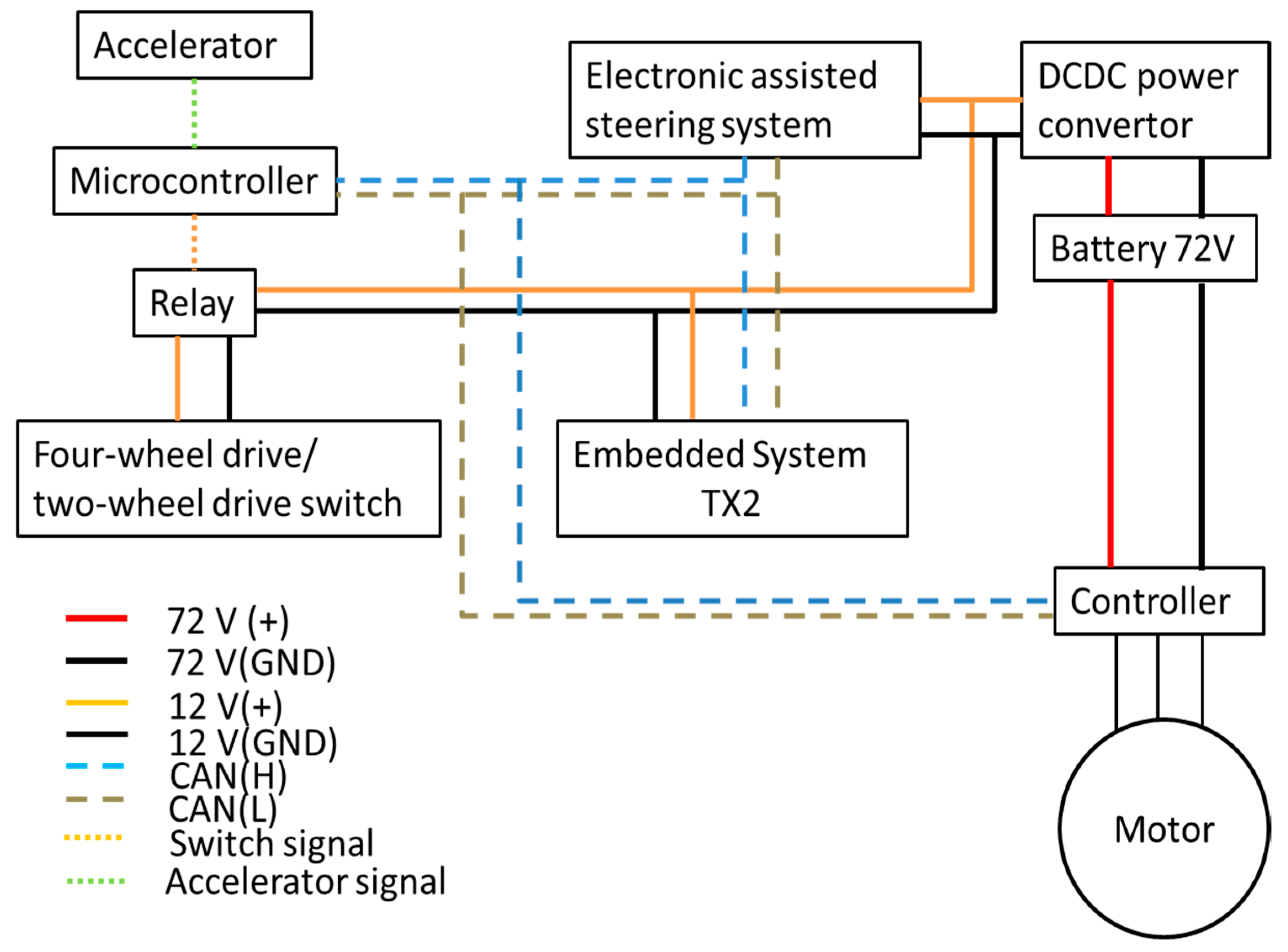
4.2. Unmanned/Intelligent Control System Integration
4.3. Vehicle System Integration and Function Testing
5. Conclusions
- According to the lightweight analysis process, the weight of the proposed vehicle body was 101 kg, and the bending and torsional rigidity were 11,579 N/mm and 4923 N·m/deg, respectively.
- In the analysis of the bending, torsion, and full load braking strength of the vehicle body, the maximum von-Mises stress was lower than the material yield strength by 2/3, which met the design requirements.
- The fatigue life analysis showed that the fatigue life of the designed vehicle body reached 6.5 × 108 km when driven on a general asphalt road at a speed of 18 km/h. When rotating or plowing at a speed of 2 km/h, the fatigue life reached 11,190 km and 23,166 km, respectively.
- This research completed the development and fabrication of a small electric tractor, which met the requirements of manual driving and automatic driving. In addition, the tractor was equipped with two 7.5 kW induction motors, driven by lithium batteries, which can achieve at least 3.5 h of working time, and the rotary tillage operations can reach a depth of about 15 cm. The result of field tests on the prototype electric tractor are shown in Table 5, Table 6 and Table 7.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ji, W. Research on the Application of Automotive New Energy and Energy-saving Technology. Sci. Technol. Wind. 2013, 8, 104. [Google Scholar]
- Carlini, M.; Abenavoli, R.I.; Kormanski, H.; Rudzinska, K. A Hybrid Electric Propulsion System for a Forest Vehicle. In Proceedings of the Energy Conversion Engineering Conference, Honolulu, HI, USA, 27 July–1 August 1997; p. 5926956. [Google Scholar]
- Florentsev, S.; Izosimov, D.; Makarov, L.; Baida, S.; Belousov, A. Complete Traction Electric Equipment Eets of Electro-Mechanical Drive Trains for Tractors. In Proceedings of the IEEE Region 8 International Conference on Computational Technologies in Electrical and Electronics Engineering, Irkutsk, Russia, 11–15 July 2010; pp. 611–616. [Google Scholar]
- Xiao, S. Development Status and Trends of Light Electric Agricultural Transport Machinery. Agric. Dev. Equip. 2012, 3, 49–50. [Google Scholar]
- Yu, Z. Research on Human-Machine System Design of Greenhouse Electric Walking Tractor. Master’s Thesis, Institute of Mechanical Engineering, Nanjing Agricultural University, Nanjing, China, 2013. [Google Scholar]
- Guan, C.S.; Hu, H.; Chen, Y.S.; Yang, Y.T.; Cao, S.M. Study on Small Electric Tractors for Greenhouses. China J. Agric. Mech. 2015, 36, 67–69. [Google Scholar]
- Troncon, D.; Alberti, L. Case of Study of the Electrification of a Tractor: Electric Motor Performance Requirements and Design. Energies 2020, 13, 2197. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, X.; Li, J. Optimization Design of Electric Tractor for Small Seeding Machinery. In Proceedings of the 3rd International Conference on Automation, Mechanical and Electrical Engineering, Shanghai, China, 22–23 July 2018; pp. 59–63. [Google Scholar] [CrossRef]
- Sitompul, J.; Zhang, H.; Noguchi, T.; Ahamed, T. Optimization study on the design of utility tractor powered by electric battery. IOP Conf. Ser. Earth Environ. Sci. 2019, 355, 012058. [Google Scholar] [CrossRef]
- Franceschetti, B.; Rondelli, V.; Capacci, E. Lateral Stability Performance of Articulated Narrow-Track Tractors. Agronomy 2021, 11, 2512. [Google Scholar] [CrossRef]
- Xu, J.; Li, R.; Li, Y.; Zhang, Y.; Sun, H.; Ding, X.; Ma, Y. Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System. Processes 2021, 9, 1920. [Google Scholar] [CrossRef]
- Askari, M.; Abbaspour-Gilandeh, Y.; Taghinezhad, E.; El Shal, A.M.; Hegazy, R.; Okasha, M. Applying the Response Surface Methodology (RSM) Approach to Predict the Tractive Performance of an Agricultural Tractor during Semi-Deep Tillage. Agriculture 2021, 11, 1043. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Abbaspour-Gilandeh, Y.; Herrera-Miranda, I.; Hernández-Hernández, J.L.; Herrera-Miranda, M.A. Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires. Agronomy 2021, 11, 696. [Google Scholar] [CrossRef]
- Du, J.; Heng, Y.; Zheng, K.; Zhang, W.; Zhang, J.; Xia, J. Evaluation of the Performance of a Combined Tillage Implement with Plough and Rotary Tiller by Experiment and DEM Simulation. Processes 2021, 9, 1174. [Google Scholar] [CrossRef]
- Cheng, J.; Zheng, K.; Xia, J.; Liu, G.; Jiang, L.; Li, D. Analysis of Adhesion between Wet Clay Soil and Rotary Tillage Part in Paddy Field Based on Discrete Element Method. Processes 2021, 9, 845. [Google Scholar] [CrossRef]
- Li, X.; Wei, B.; Xu, X.; Zhou, J. Effect of Deep Vertical Rotary Tillage on Soil Properties and Sugarcane Biomass in Rainfed Dry-Land Regions of Southern China. Sustainability 2020, 12, 10199. [Google Scholar] [CrossRef]
- Lygouras, E.; Gasteratos, A. A novel moving-base RTK-GPS-Based wearable apparatus for precise localization of humans in peril. Microprocess. Microsyst. 2021, 82, 103833. [Google Scholar] [CrossRef]
- Yu, W.; Peng, H.; Pan, L.; Dai, W.; Qu, X.; Ren, Z. Performance assessment of high-rate GPS/BDS precise point positioning for vibration monitoring based on shaking table tests. Adv. Space Res. 2021. [Google Scholar] [CrossRef]
- Gutmann, E.D.; Larson, K.M.; Williams, M.W. Snow measurement by GPS interferometric reflectometry: An evaluation at Niwot Ridge, Colorado. Hydrol. Process. 2012, 26, 2951–2961. [Google Scholar] [CrossRef]
- Zhao, L.; Qiu, H.; Feng, Y. Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system. Measurement 2016, 80, 138–147. [Google Scholar] [CrossRef]
- Amini, A.; Vaghefi, R.M.; Jesus, M.; Buehrer, R.M. Improving GPS-based vehicle positioning for intelligent transportation systems. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1023–1029. [Google Scholar]
- Gao, H. Research on Electric Tractor Drive System. Ph.D. Thesis, College of Engineering, Nanjing Agricultural University, Nanjing, China, 2008. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameters | ||
|---|---|---|
| Length | Width | Height |
| 1720 mm | 1100 mm | 660 mm |
| Tire size | Total vehicle weight | |
| Front 26 × 8-14 | Rear 26 × 10-14 | 650 kg |
| Type Parameter | SPFH 590 | STKM 11A |
|---|---|---|
| Density (kg/m3) | 7850 | 7850 |
| Young’s Modulus (MPa) | 210 | 210 |
| Yielding Stress (MPa) | 420 | 175 |
| Ultimate Stress (MPa) | 590 | 290 |
| Poisson’s Ratio | 0.3 | 0.3 |
| Front Suspension | Rear Suspension | |
|---|---|---|
| Spring Constant (N/mm) | 27.5 (Kf) | 27.5 (Kr) |
| Damping Coefficient (N.s/mm) | 0.96 (Cf) | 2.16 (Cr) |
| Rated Voltage | DC72V |
|---|---|
| Rated power | 7.5 kW |
| Instantaneous peak | 17.8 kW |
| Maximum speed | 5800 rpm |
| Maximum torque | 23.2 N-m |
| Field Test | |||
|---|---|---|---|
| Velocity (km/h) | Road Type | Current (A) | Power (W) |
| 3.05 | Asphalt | 2.38 | 185.64 |
| Hard | 7.3 | 569.4 | |
| Soft | 3.83 | 298.74 | |
| Grass | 2.5 | 195 | |
| 1.02 | Asphalt | 14.16 | 1104.48 |
| Hard | 26.0 | 2028 | |
| Soft | 10.85 | 846.3 | |
| Grass | 16.7 | 1302.6 | |
| Velocity (km/h) | Depth (cm) | Driving Current | Tillage Current | ||
|---|---|---|---|---|---|
| Current (A) | Power (W) | Current (A) | Power (W) | ||
| 1.02 | 5 | 10.9 | 850.2 | 28.1 | 2191.8 |
| 10 | 7.9 | 616.2 | 32.8 | 2558.4 | |
| 15 | 12.9 | 1006.2 | 37.4 | 2917.2 | |
| 3.05 | 5 | 25.7 | 2004.6 | 44.3 | 3455.4 |
| 10 | 28.2 | 2199.6 | 49.1 | 3829.8 | |
| 15 | 37.2 | 2901.6 | 52.2 | 4071.6 | |
| Drive Current and Tillage Current (A) | |
|---|---|
| Low speed 1.02 (km/h) | 50.3 A |
| High speed 3.05 (km/h) | 126.6 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-C.; Chen, L.-W.; Chang, M.-Y. A Design of an Unmanned Electric Tractor Platform. Agriculture 2022, 12, 112. https://doi.org/10.3390/agriculture12010112
Chen Y-C, Chen L-W, Chang M-Y. A Design of an Unmanned Electric Tractor Platform. Agriculture. 2022; 12(1):112. https://doi.org/10.3390/agriculture12010112
Chicago/Turabian StyleChen, Yung-Chuan, Li-Wen Chen, and Ming-Yen Chang. 2022. "A Design of an Unmanned Electric Tractor Platform" Agriculture 12, no. 1: 112. https://doi.org/10.3390/agriculture12010112
APA StyleChen, Y.-C., Chen, L.-W., & Chang, M.-Y. (2022). A Design of an Unmanned Electric Tractor Platform. Agriculture, 12(1), 112. https://doi.org/10.3390/agriculture12010112