
Design, DEM Simulation, and Field Experiments of a Novel Precision Seeder for Dry Direct-Seeded Rice with Film Mulching

Abstract
1. Introduction
2. Structure and Working Principles of the Proposed Seeder
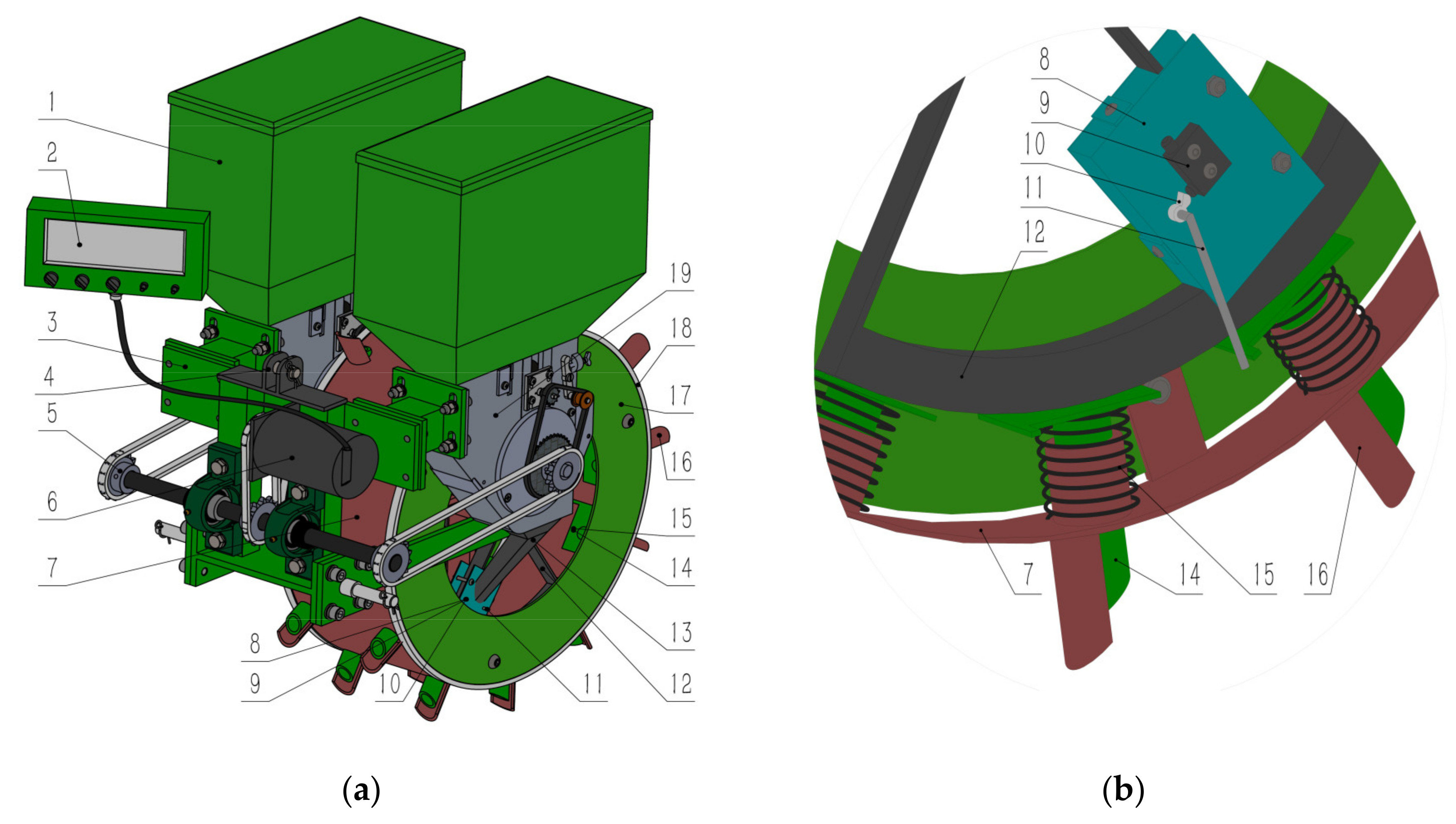
2.1. Machine Structure
2.2. Working Principle
2.3. Structural Design of Critical Component
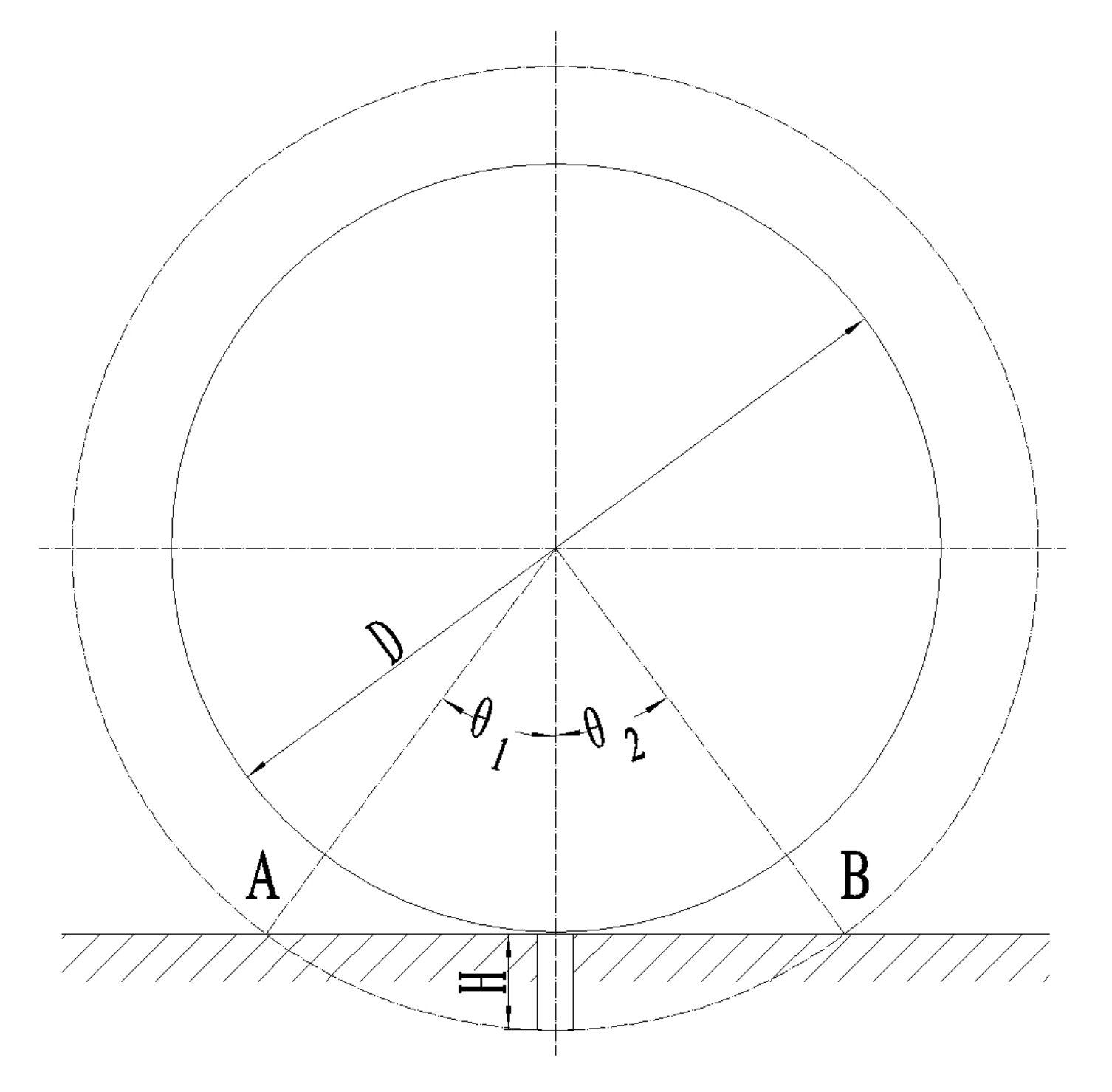
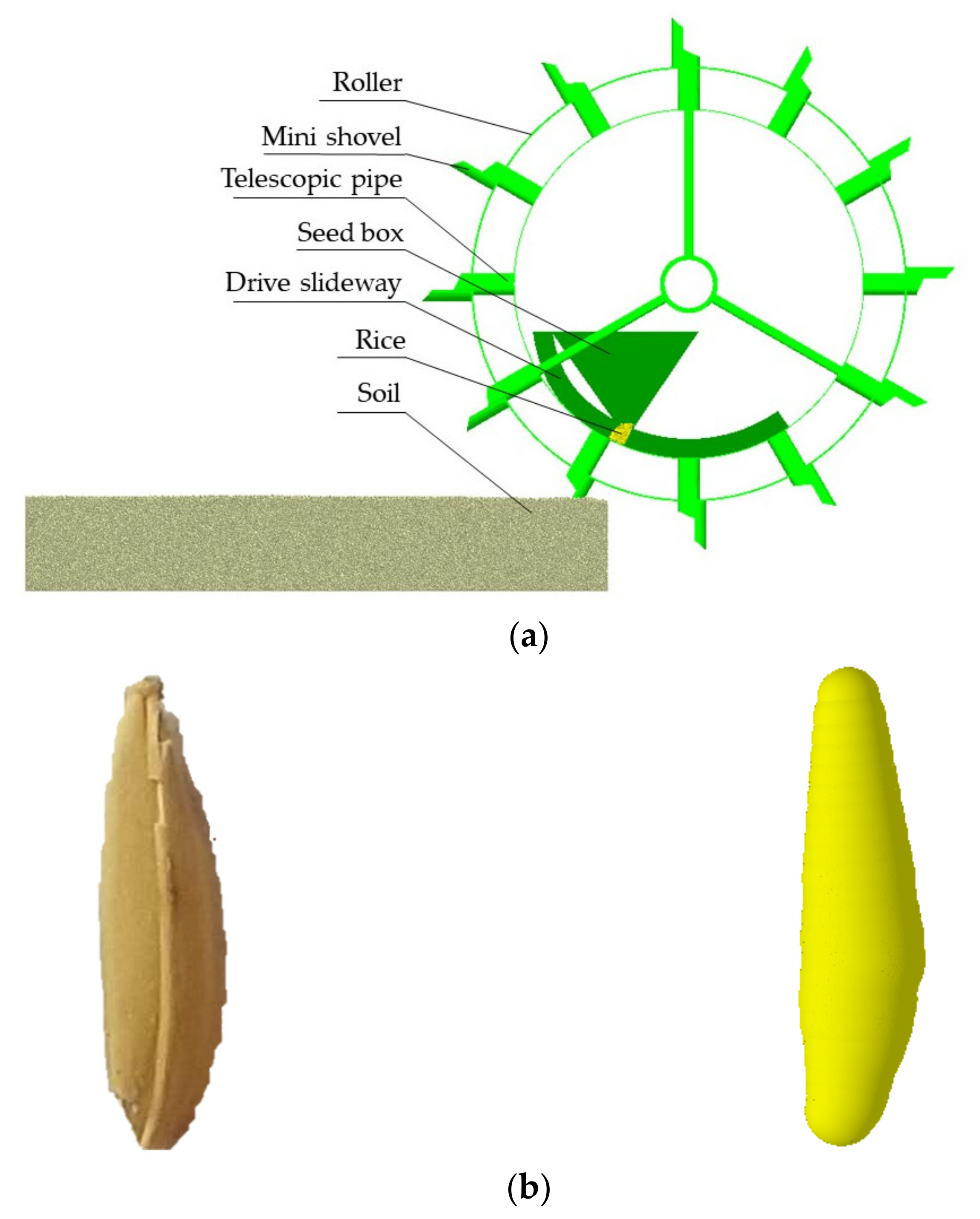
2.3.1. Roller and Contact Ratio
2.3.2. Drive Slideway
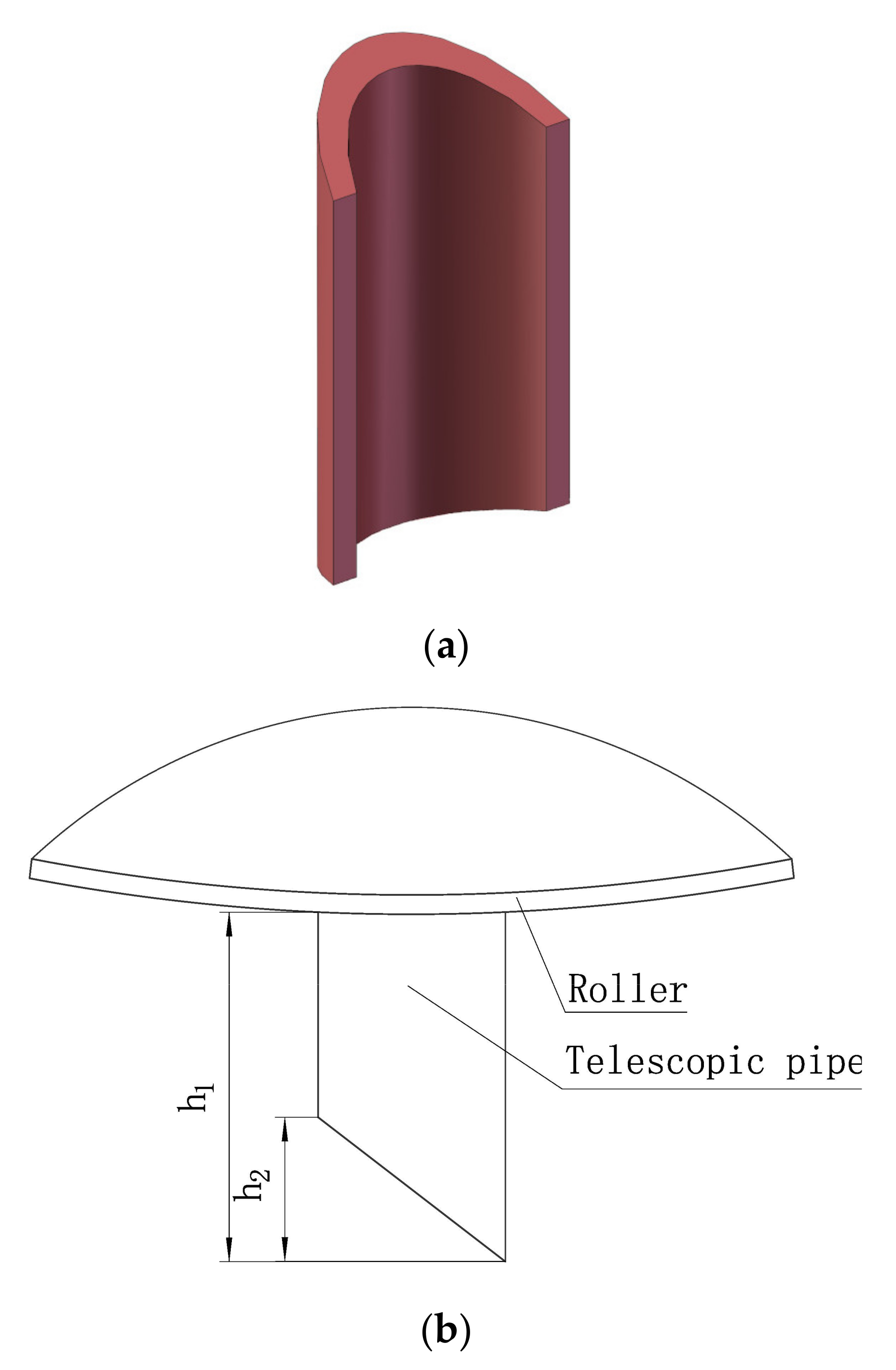
2.3.3. Mini Shovel and Telescopic Pipe
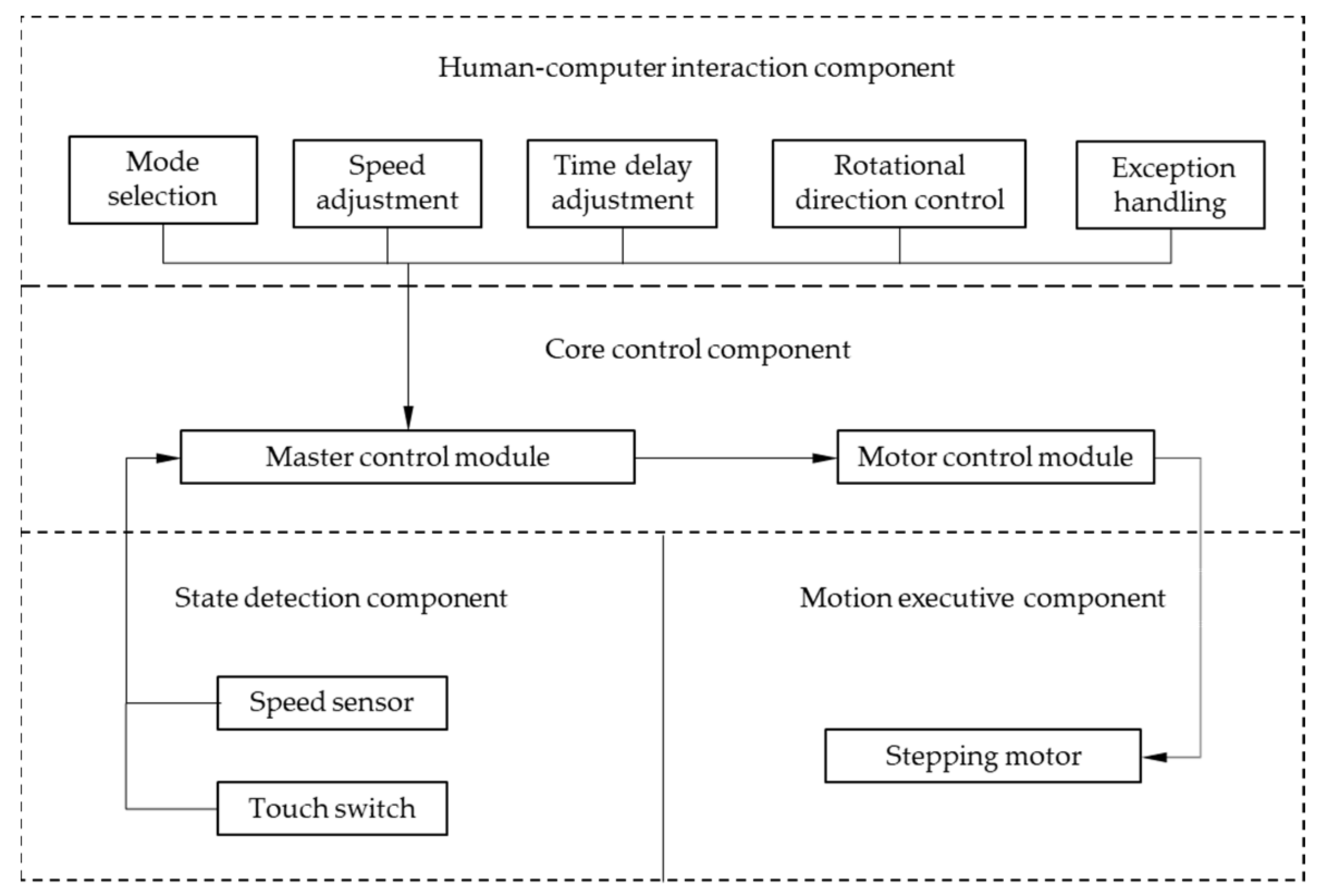
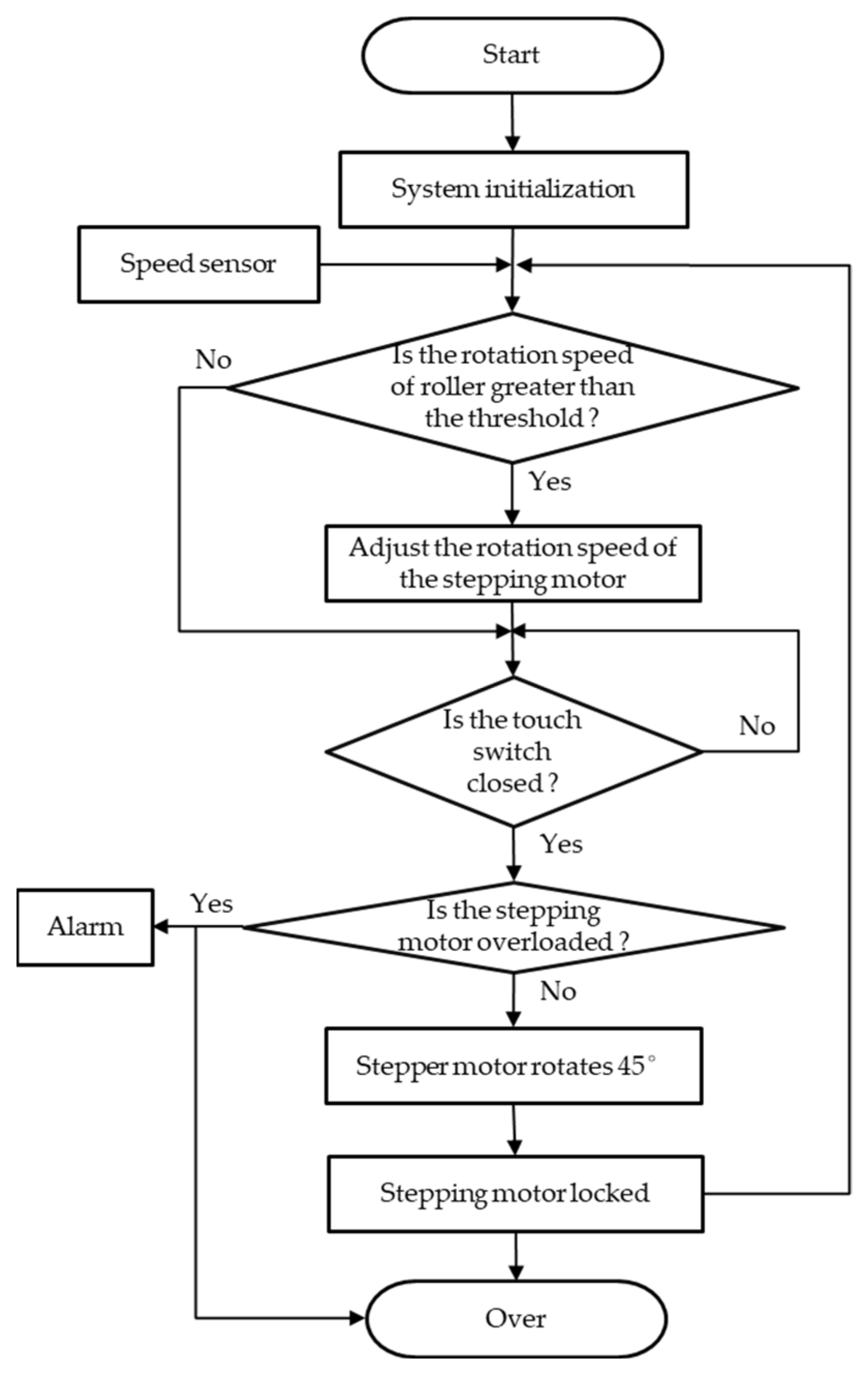
2.3.4. Electronic Control System
3. Materials and Methods
3.1. DEM Simulation
3.1.1. Simulation Model and Parameters
3.1.2. Central Composite Design
3.2. Field Experiment
3.3. Data Analysis
4. Results and Discussion
4.1. Simulation Experimental Results
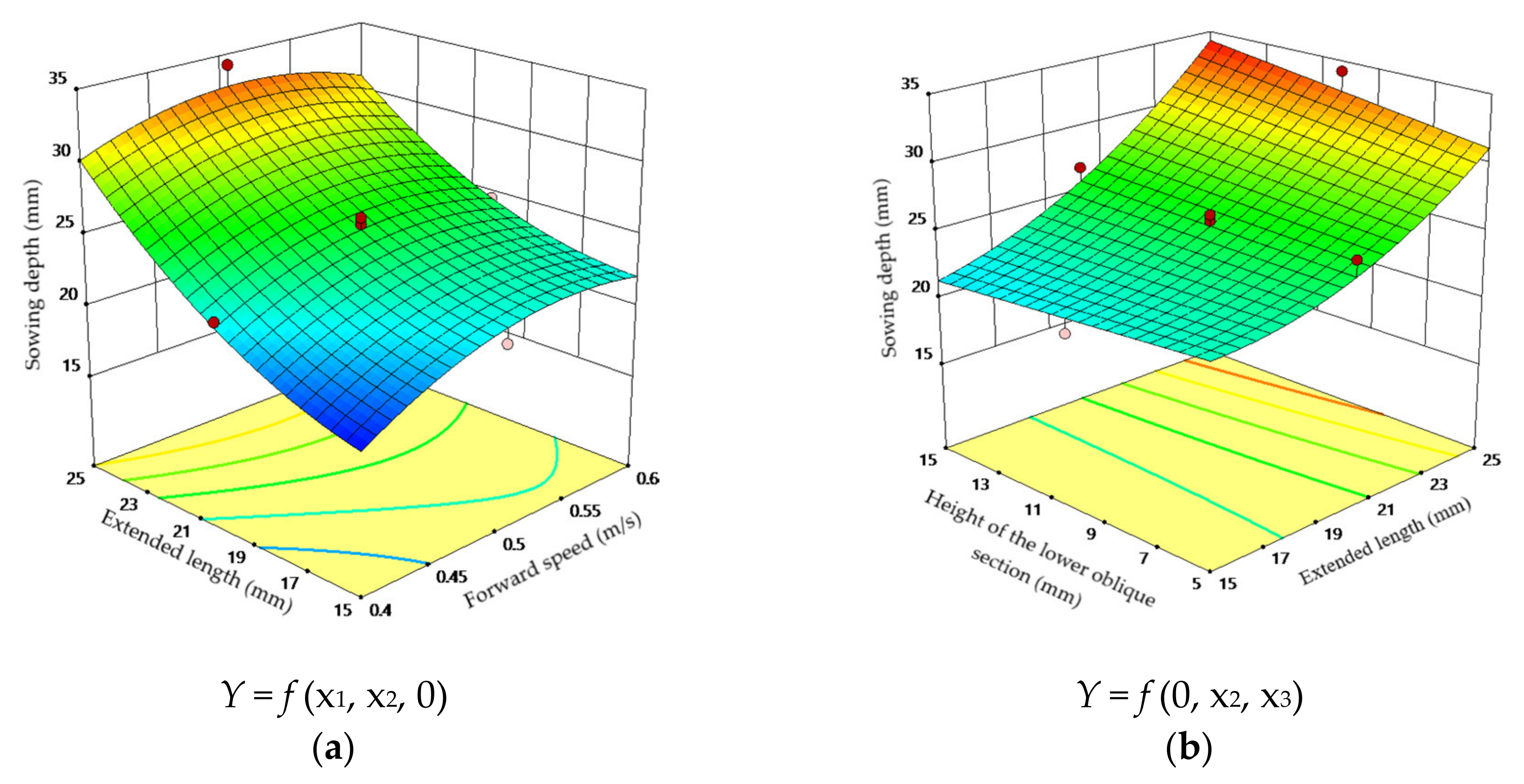
4.2. Interactive Analysis and Discussion
4.3. Field Experiment Results
5. Conclusions
- (1)
- The precise rice sowing was obtained by selecting the combined type-hole seed-metering device. Moreover, the sowing depth can be adjusted within the range of 15 to 40 mm to satisfy the agronomic requirements of different sowing depths. The drive slideway converted passive sowing to forced sowing, and the mini shovel pushed away from the soil and obstacles in the seeding area, thus reducing the possibility that the telescopic pipe would be clogged.
- (2)
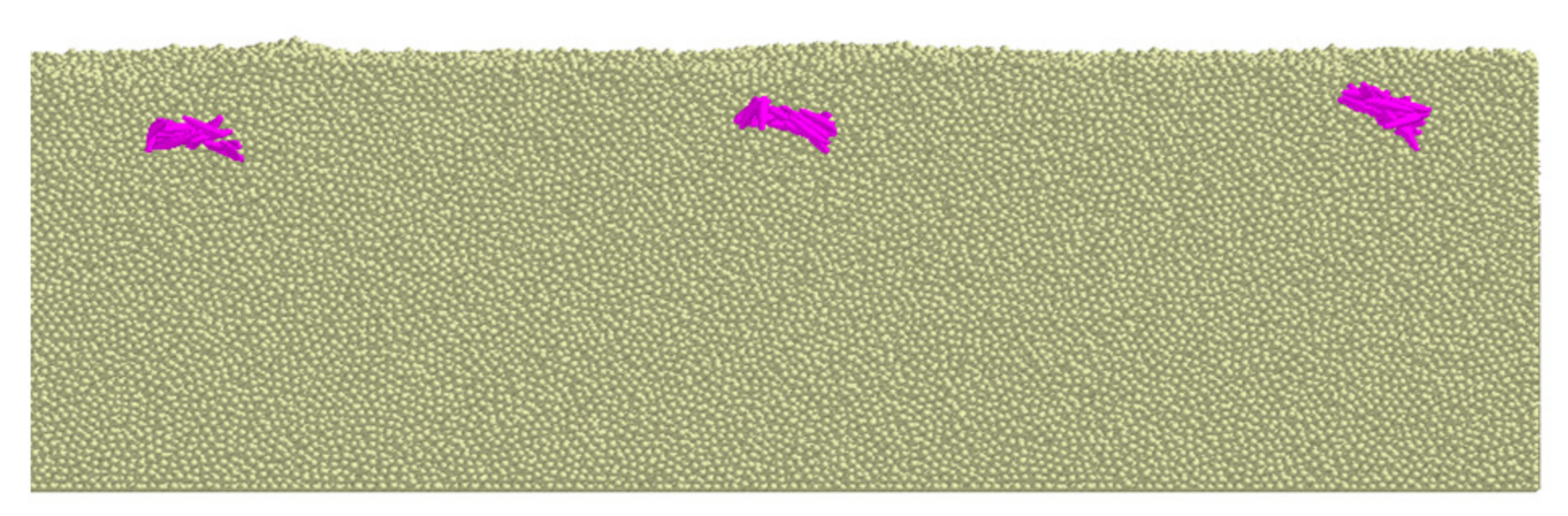
- DEM allowed the simulation of the device sowing process. Moreover, a regression equation was established with the sowing depth as the dependent variable, and the forward speed of the traction device, the extended length of the telescopic pipe, and the height of the lower oblique section of the telescopic pipe as the independent variables. The simulation experiments and field experiments showed that the regression equation could predict the sowing depth accurately.
- (3)
- Field experiments were conducted according to agronomic requirements. The experiment results showed that the right rate of hill distances, stagger rate of film hill and hill, right rate of depth of sowing under film, right rate of seeds per hill, and rate of no seed hill were 100%, 4.8388%, 95%, 83.33%, and 3.2258%, respectively. The experimental results showed that the rice precision seeder with trepanning in the plastic film could achieve the design and agronomic requirements for actual production.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kumar, V.; Ladha, J.K. Direct Seeding of Rice: Recent Developments and Future Research Needs. Adv. Agron. 2011, 111, 297–413. [Google Scholar] [CrossRef]
- Tuong, T.; Bouman, B. Rice production in water scarce environments. In Water Productivity in Agriculture: Limits and Opportunities for Improvement; Kijne, J., Barker, R., Molden, D., Eds.; CABI Publishing: Wallingford, UK, 2003; pp. 53–67. [Google Scholar]
- Chakraborty, D.; Ladha, J.K.; Rana, D.S.; Jat, M.L.; Gathala, M.K.; Yadav, S.; Rao, A.N.; Ramesha, M.S.; Raman, A. A global analysis of alternative tillage and crop establishment practices for economically and environmentally efficient rice production. Sci. Rep. 2017, 7, 9342. [Google Scholar] [CrossRef] [PubMed]
- Tuong, T.P.; Castillo, E.G.; Cabangon, R.C.; Boling, A.; Singh, U. The drought response of lowland rice to crop establishment practices and N-fertilizer sources. Field Crop. Res. 2002, 74, 243–257. [Google Scholar] [CrossRef]
- Sun, L.M.; Hussain, S.; Liu, H.Y.; Peng, S.B.; Huang, J.L.; Cui, K.H.; Nie, L.X. Implications of low sowing rate for hybrid rice varieties under dry direct-seeded rice system in central China. Field Crop. Res. 2015, 175, 87–95. [Google Scholar] [CrossRef]
- Farooq, M.; Siddique, K.H.; Rehman, H.; Aziz, T.; Lee, D.J.; Wahid, A. Rice direct seeding: Experiences, challenges and opportunities. Soil Tillage Res. 2011, 111, 87–98. [Google Scholar] [CrossRef]
- Liu, H.Y.; Hussain, S.; Zheng, M.M.; Peng, S.B.; Huang, J.L.; Cui, K.H.; Nie, L.X. Dry direct-seeded rice as an alternative to transplanted-flooded rice in Central China. Agron. Sustain. Dev. 2015, 35, 285–294. [Google Scholar] [CrossRef]
- Sandhu, N.; Subedi, S.R.; Singh, V.K.; Sinha, P.; Kumar, S.; Singh, S.P.; Ghimire, S.K.; Pandey, M.; Yadaw, R.B.; Varshney, R.K.; et al. Deciphering the genetic basis of root morphology, nutrient uptake, yield, and yield-related traits in rice under dry direct-seeded cultivation systems. Sci. Rep. 2019, 9, 9334. [Google Scholar] [CrossRef]
- Xu, L.; Li, X.X.; Wang, X.Y.; Xiong, D.L.; Wang, F. Comparing the Grain Yields of Direct-Seeded and Transplanted Rice: A Meta-Analysis. Agronomy 2019, 9, 767. [Google Scholar] [CrossRef]
- Kakumanu, K.R.; Kotapati, G.R.; Nagothu, U.S.; Kuppanan, P.; Kallam, S.R. Adaptation to climate change and variability: A case of direct seeded rice in Andhra Pradesh, India. J. Water Clim. Chang. 2019, 10, 419–430. [Google Scholar] [CrossRef]
- Fawibe, O.O.; Hiramatsu, M.; Taguchi, Y.; Wang, J.; Isoda, A. Grain yield, water-use efficiency, and physiological characteristics of rice cultivars under drip irrigation with plastic-film-mulch. J. Crop Improv. 2020, 34, 414–436. [Google Scholar] [CrossRef]
- Zhang, Z.C.; Zhang, S.F.; Yang, J.C.; Zhang, J.H. Yield, grain quality and water use efficiency of rice under non-flooded mulching cultivation. Field Crop. Res. 2008, 108, 71–81. [Google Scholar] [CrossRef]
- He, H.B.; Ma, F.Y.; Yang, R.; Chen, L.; Jia, B.; Cui, J.; Fan, H.; Wang, X.; Li, L. Rice Performance and Water Use Efficiency under Plastic Mulching with Drip Irrigation. PLoS ONE 2013, 8, e83103. [Google Scholar] [CrossRef] [PubMed]
- Jabran, K.; Ullah, E.; Hussain, M.; Farooq, M.; Zaman, U.; Yaseen, M.; Chauhan, B.S. Mulching Improves Water Productivity, Yield and Quality of Fine Rice under Water-saving Rice Production Systems. J. Agron. Crop Sci. 2015, 201, 389–400. [Google Scholar] [CrossRef]
- Li, Y.S.; Wu, L.H.; Zhao, L.M.; Lu, X.H.; Fan, Q.L.; Zhang, F.S. Influence of continuous plastic film mulching on yield, water use efficiency and soil properties of rice fields under non-flooding condition. Soil Tillage Res. 2007, 93, 370–378. [Google Scholar] [CrossRef]
- Wang, Z.M.; Luo, X.W.; Chen, X.F.; Mo, Z.W. Effects of precision rice hill-drop drilling on rice quality. Trans. Chin. Soc. Agric. Eng. 2015, 31, 16–21. [Google Scholar] [CrossRef]
- Wang, Z.M.; Dai, Y.Z.; Wang, B.L.; Zhang, M.H.; Chen, X.F.; Mo, Z.W.; Luo, X.W. Research on Hill-drop Drilling and Row Drilling of Rice. China Rice 2016, 22, 19–20. [Google Scholar] [CrossRef]
- Wang, J.P. Study of Framework and Parameter of Film Mulching Hill-Drop Planter. Master’s Thesis, China Agriculture University, Beijing, China, 2005. [Google Scholar]
- Zhang, S.J. Design and test of 2BMK-1/3 dibble filming planter machine. J. Chin. Agric. Mech. 2013, 34, 113–117. [Google Scholar] [CrossRef]
- Niu, Q.; Wang, S.G.; Chen, X.G. Design of Rice Planter with Plastic Film Mulched Drip Irrigation. Trans. Chin. Soc. Agric. Mach. 2016, 47, 102. [Google Scholar] [CrossRef]
- Luo, X.W.; Wang, Z.M.; Jiang, E.C.; Li, J.H.; Li, Q.; Chen, W.T. Design of Disassemble Rubber Guard Device for Cell Wheel Feed. Trans. Chin. Soc. Agric. Mach. 2008, 39, 60–63. [Google Scholar]
- Zhang, M.H.; Luo, X.W.; Wang, Z.M.; Dai, Y.Z.; Wang, B.L.; Zheng, L. Design and Experiment of Combined Hole-type Metering Device of Rice Hill-drop Drilling Machine. Trans. Chin. Soc. Agric. Mach. 2016, 47, 29–36. [Google Scholar]
- Liu, H.X.; Su, H.; Li, J.L.; Liu, Z.J. Interactive Optimal Design System of Drum-type No-till Planter Mechanism. Trans. Chin. Soc. Agric. Mach. 2019, 50, 58–68. [Google Scholar]
- Liu, H.X.; Wen, H.N.; Gai, G.W.; Tang, S.F. Design and Experiment on Passive Drum-type No-till Planter Cavitation Mechanism. Trans. Chin. Soc. Agric. Mach. 2017, 48, 53–61. [Google Scholar] [CrossRef]
- Zhang, X.J.; Yang, Y.; Zhou, L. Selection and definitiveness on main parameters of bunch planting cylinder. Trans. Chin. Soc. Agric. Mach. 1998, 29, 63–66. [Google Scholar]
- Shi, Y.Y.; Sun, X.; Wang, X.C.; Hu, Z.C.; Newman, D.; Ding, W.M. Numerical simulation and field tests of minimum-tillage planter with straw smashing and strip laying based on EDEM software. Comput. Electron. Agric. 2019, 166, 105021. [Google Scholar] [CrossRef]
- Barr, J.; Desbiolles, J.; Ucgul, M.; Fielke, J.M. Bentleg furrow opener performance analysis using the discrete element method. Biosyst. Eng. 2020, 18, 99–115. [Google Scholar] [CrossRef]
- Li, M.S.; Mitsuoka, M.; Inoue, E.; Ye, J.; Liu, J.; Yang, S.; Zeng, B.G.; Song, X.X.; Okayasu, T.; Hirai, Y. Design and Performance Analysis of a Seed Metering Device for a Buckwheat Seeder Adopting Discrete Element Analysis. J. Fac. Agric. Kyushu Univ. 2020, 65, 123–129. [Google Scholar] [CrossRef]
- Ge, Y. Experimental Design Method and Application of Design-Expert Software; Harbin Institute of Technology Press: Harbin, China, 2015; pp. 62–95. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Parameters | Value |
|---|---|---|
| Rice | Density (kg·m−3) | 1147 |
| Poison ratio | 0.25 | |
| Shear modulus (Mpa) | 108 | |
| Soil | Density (kg·m−3) | 1914 |
| Poison ratio | 0.38 | |
| Shear modulus (Mpa) | 1 | |
| Steel | Density (kg·m−3) | 7850 |
| Poison ratio | 0.3 | |
| Shear modulus (Mpa) | 79,000 | |
| Rice-Rice | Elastic restitution coefficient | 0.13 |
| Static friction coefficient | 0.52 | |
| Rolling friction coefficient | 0.1 | |
| Soil-Soil | Elastic restitution coefficient | 0.11 |
| Static friction coefficient | 0.6 | |
| Rolling friction coefficient | 0.4 | |
| Rice-Steel | Elastic restitution coefficient | 0.41 |
| Static friction coefficient | 0.48 | |
| Rolling friction coefficient | 0.01 | |
| Soil-Steel | Elastic restitution coefficient | 0.12 |
| Static friction coefficient | 0.3 | |
| Rolling friction coefficient | 0.05 | |
| Rice-Soil | Elastic restitution coefficient | 0.08 |
| Static friction coefficient | 0.9 | |
| Rolling friction coefficient | 0.7 |
| Code Value | Forward Speed V (m·s−1) | Extended Length h1 (mm) | Height of the Lower Oblique Section h2 (mm) |
|---|---|---|---|
| 1 | 0.6 | 25 | 15 |
| 0 | 0.5 | 20 | 10 |
| −1 | 0.4 | 15 | 5 |
| No. | Forward Speed V (m·s−1) | Extended Length h1 (mm) | Height of the Lower Oblique Section h2 (mm) | Sowing Depth Y (mm) |
|---|---|---|---|---|
| 1 | −1 | −1 | −1 | 18.8 |
| 2 | 1 | −1 | −1 | 23.6 |
| 3 | −1 | 1 | −1 | 27.9 |
| 4 | 1 | 1 | −1 | 29.4 |
| 5 | −1 | −1 | 1 | 17.7 |
| 6 | 1 | −1 | 1 | 21.5 |
| 7 | −1 | 1 | 1 | 31.7 |
| 8 | 1 | 1 | 1 | 32.1 |
| 9 | −1 | 0 | 0 | 22.5 |
| 10 | 1 | 0 | 0 | 24.6 |
| 11 | 0 | −1 | 0 | 21 |
| 12 | 0 | 1 | 0 | 34.2 |
| 13 | 0 | 0 | −1 | 26.1 |
| 14 | 0 | 0 | 1 | 26.9 |
| 15 | 0 | 0 | 0 | 25.8 |
| 16 | 0 | 0 | 0 | 26.3 |
| 17 | 0 | 0 | 0 | 22.7 |
| 18 | 0 | 0 | 0 | 23.7 |
| 19 | 0 | 0 | 0 | 26.3 |
| Source | Sum of Squares | df | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 329.28 | 7 | 47.04 | 26.14 | <0.0001 * |
| V | 15.88 | 1 | 15.88 | 8.82 | 0.0127 * |
| h1 | 278.31 | 1 | 278.31 | 154.66 | <0.0001 * |
| h2 | 1.52 | 1 | 1.52 | 0.8453 | 0.3776 |
| Vh1 | 5.44 | 1 | 5.44 | 3.03 | 0.1098 |
| h1h2 | 11.52 | 1 | 11.52 | 6.4 | 0.028 * |
| V2 | 13.65 | 1 | 13.65 | 7.58 | 0.0188 * |
| h12 | 12.53 | 1 | 12.53 | 6.96 | 0.023 * |
| Residual | 19.79 | 11 | 1.8 | ||
| Lack of Fit | 8.84 | 7 | 1.26 | 0.4612 | 0.8251 |
| Pure Error | 10.95 | 4 | 2.74 | ||
| Cor Total | 349.08 | 18 |
| Parameters | Right Rate of Hill Distances/% | Stagger Rate of Film Hill and Hill/% | Right Rate of Depth of Sowing under Film/% | Right Rate of Seeds Per Hill/% | Rate of No Seed Hill/% |
|---|---|---|---|---|---|
| Value | 100 | 4.8388 | 95 | 83.33 | 3.2258 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Zeng, S.; Luo, X.; Fang, L.; Liang, Z.; Yang, W. Design, DEM Simulation, and Field Experiments of a Novel Precision Seeder for Dry Direct-Seeded Rice with Film Mulching. Agriculture 2021, 11, 378. https://doi.org/10.3390/agriculture11050378
Li H, Zeng S, Luo X, Fang L, Liang Z, Yang W. Design, DEM Simulation, and Field Experiments of a Novel Precision Seeder for Dry Direct-Seeded Rice with Film Mulching. Agriculture. 2021; 11(5):378. https://doi.org/10.3390/agriculture11050378
Chicago/Turabian StyleLi, Hui, Shan Zeng, Xiwen Luo, Longyu Fang, Zhanhao Liang, and Wenwu Yang. 2021. "Design, DEM Simulation, and Field Experiments of a Novel Precision Seeder for Dry Direct-Seeded Rice with Film Mulching" Agriculture 11, no. 5: 378. https://doi.org/10.3390/agriculture11050378
APA StyleLi, H., Zeng, S., Luo, X., Fang, L., Liang, Z., & Yang, W. (2021). Design, DEM Simulation, and Field Experiments of a Novel Precision Seeder for Dry Direct-Seeded Rice with Film Mulching. Agriculture, 11(5), 378. https://doi.org/10.3390/agriculture11050378