
Construction and Experimental Verification of Sloped Terrain Soil Pressure-Sinkage Model


 and
and 
Abstract
1. Introduction
2. Materials and Methods
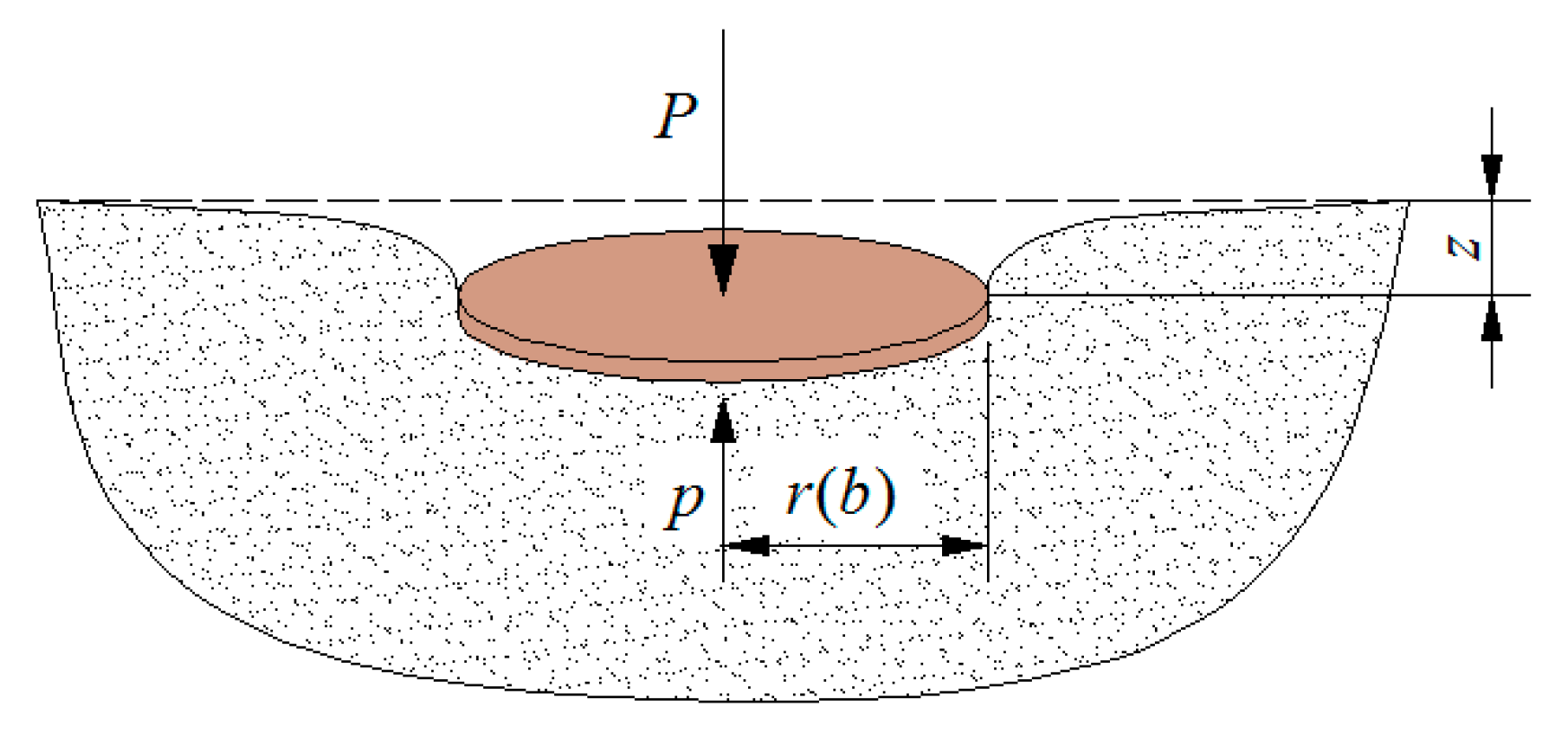
2.1. Bekker’s Pressure-Sinkage Theory
2.2. Influence of Soil Water Content and Density on Pressure-Sinkage Characteristics
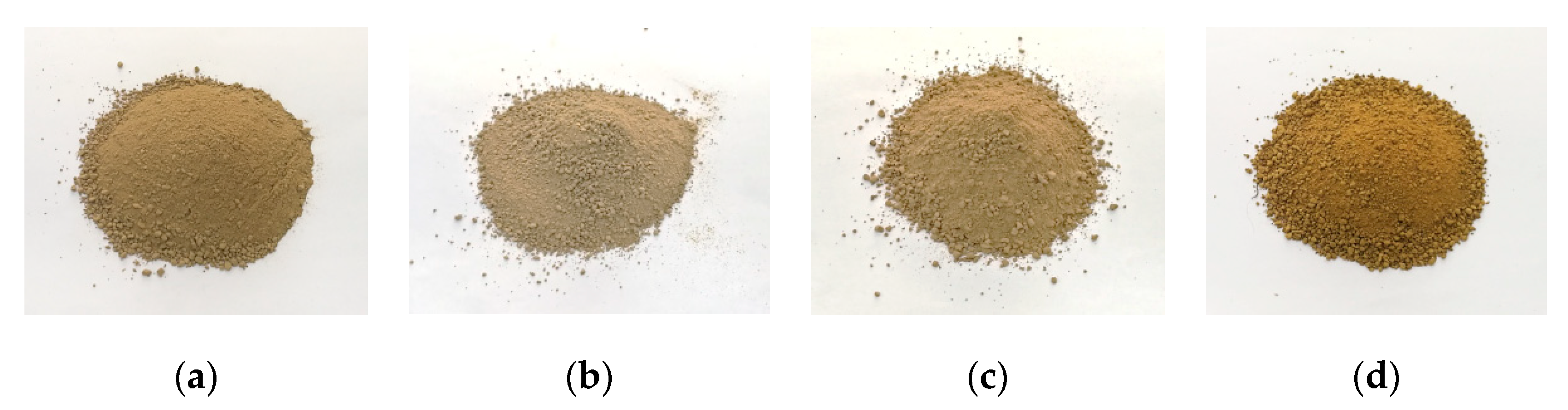
2.2.1. Soil Samples and Soil Type Determination
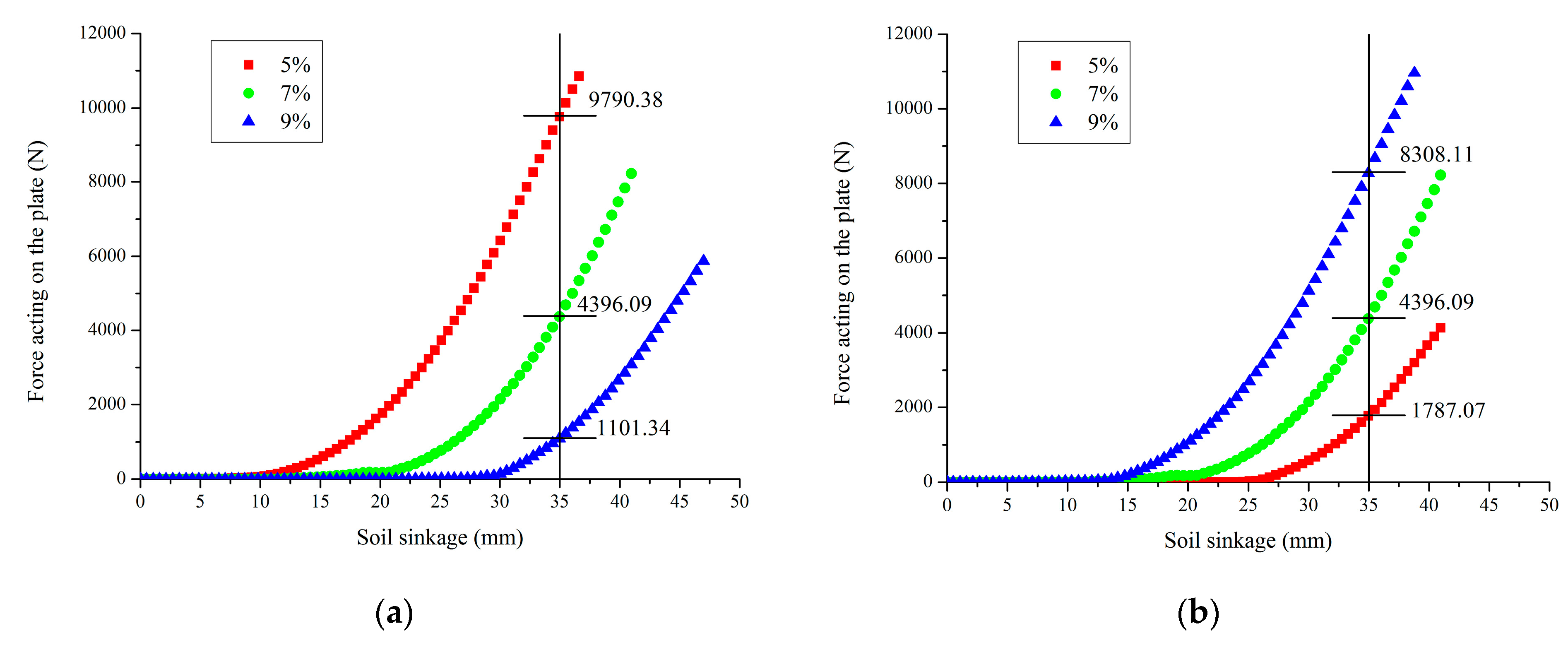
2.2.2. Influence of Soil Water Content and Bulk Density on Pressure-Sinkage Curve
- Soil water content and bulk density test
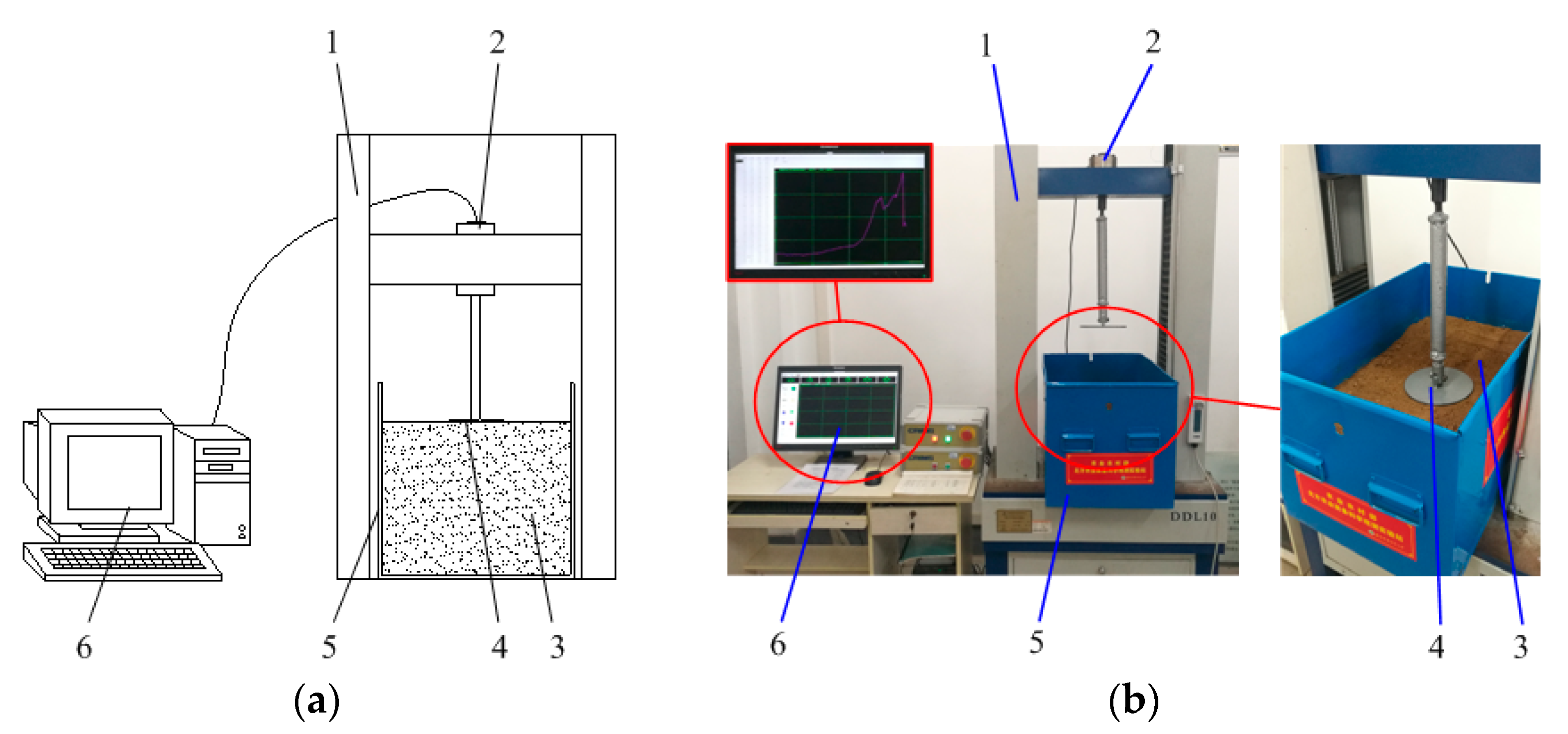
- Plate penetration test under flat terrain conditions
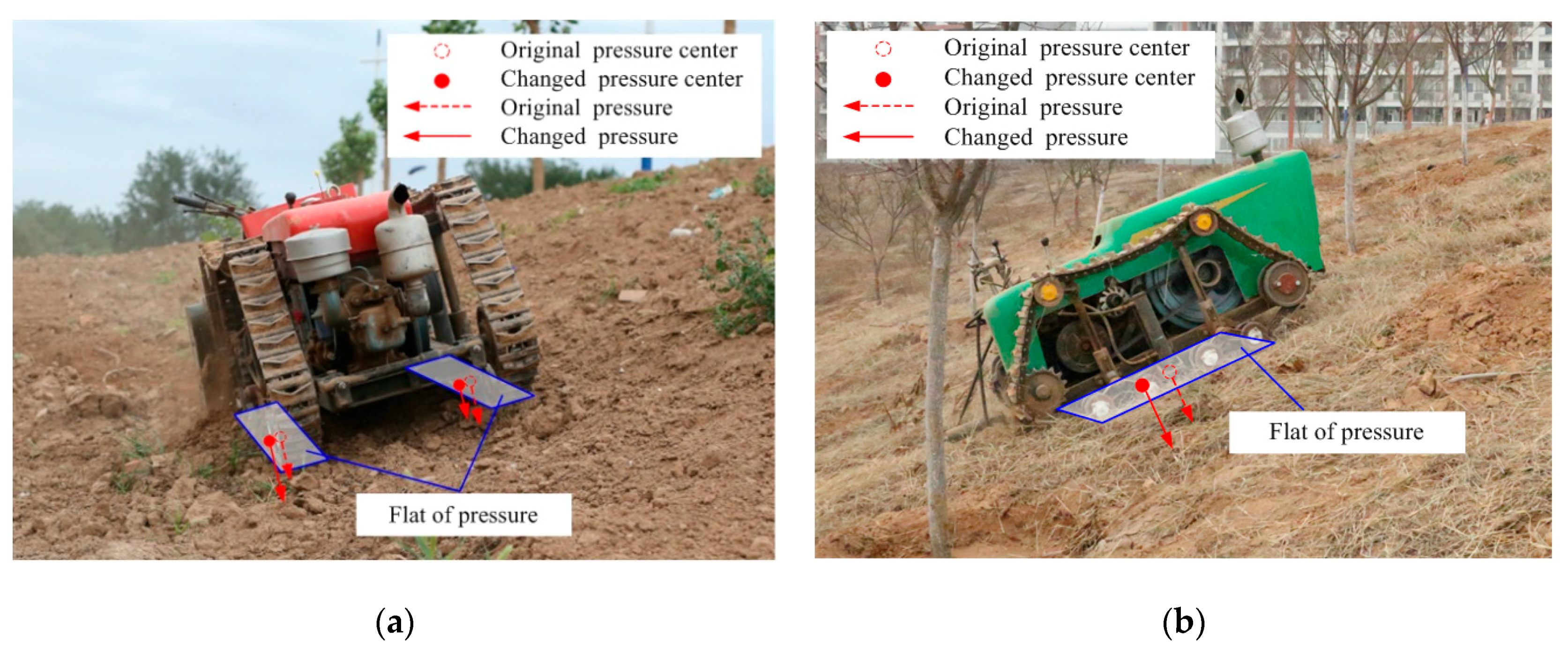
2.3. Modification of Bekker’s Model under Sloped Terrain Conditions
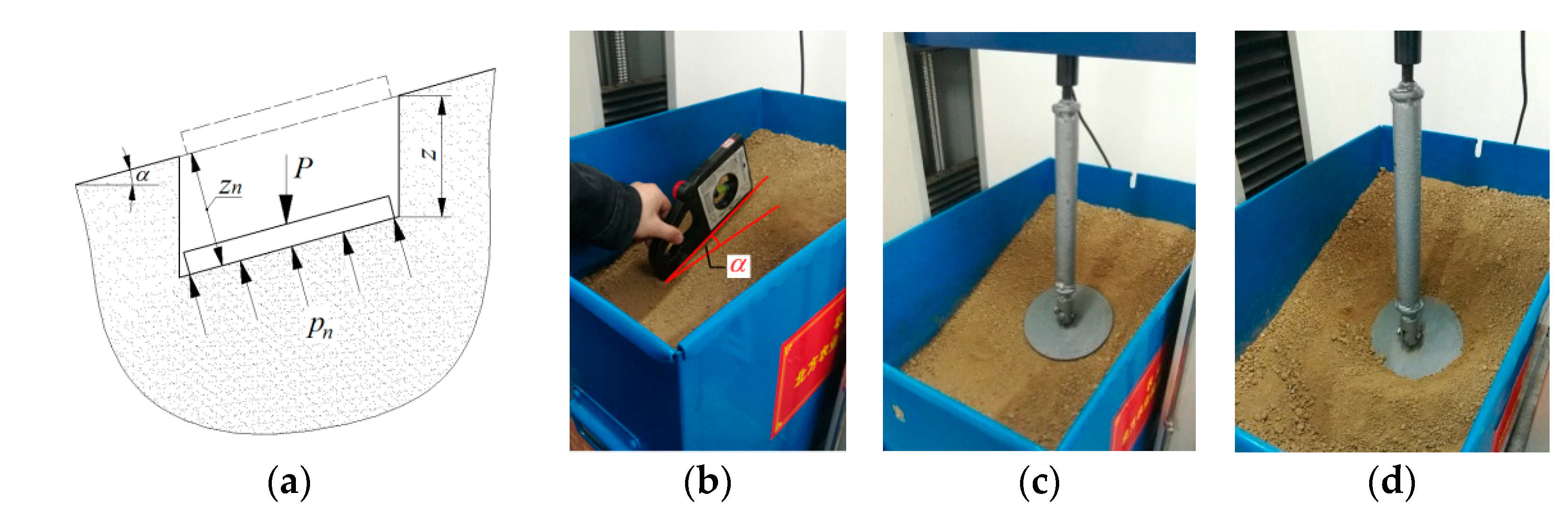
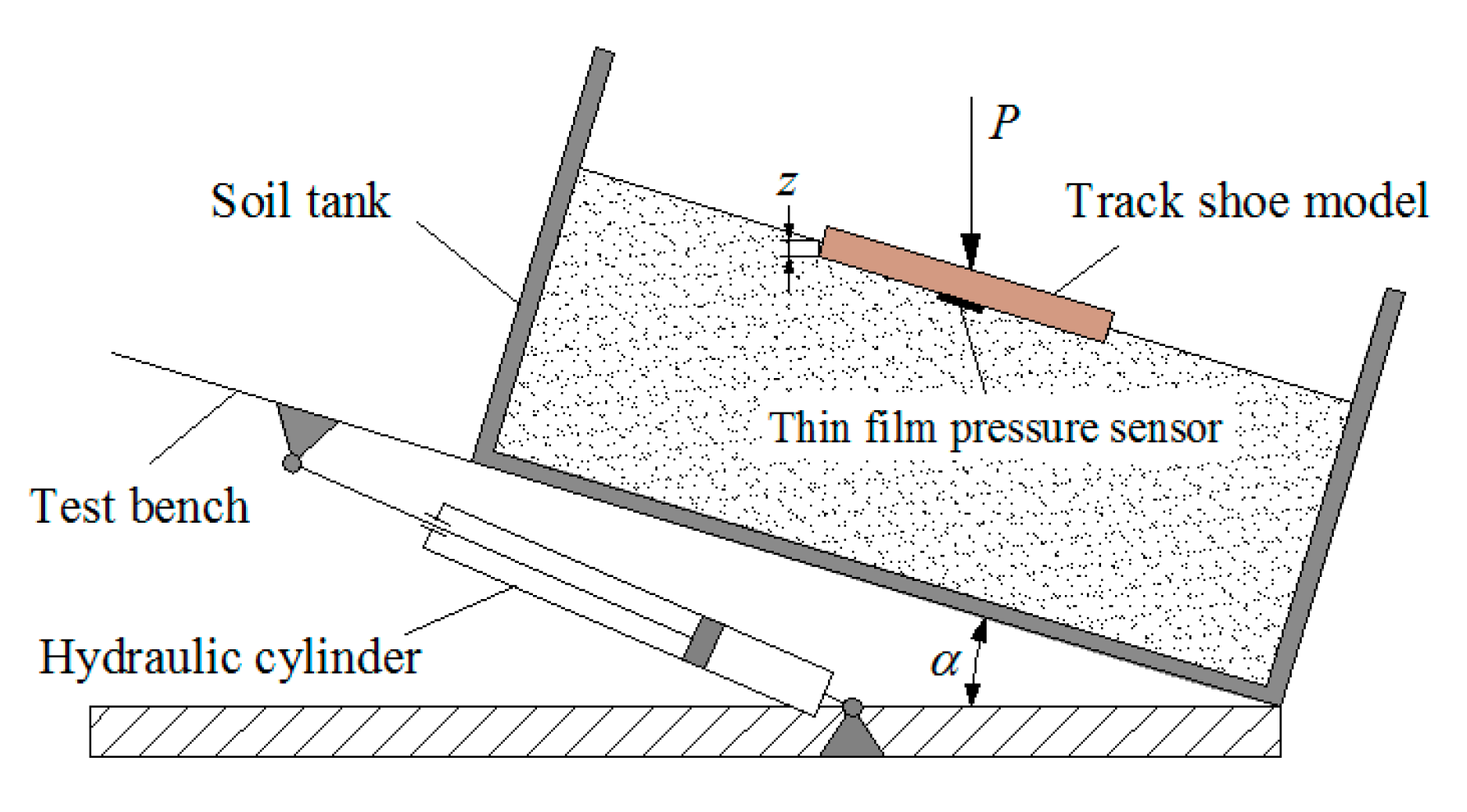
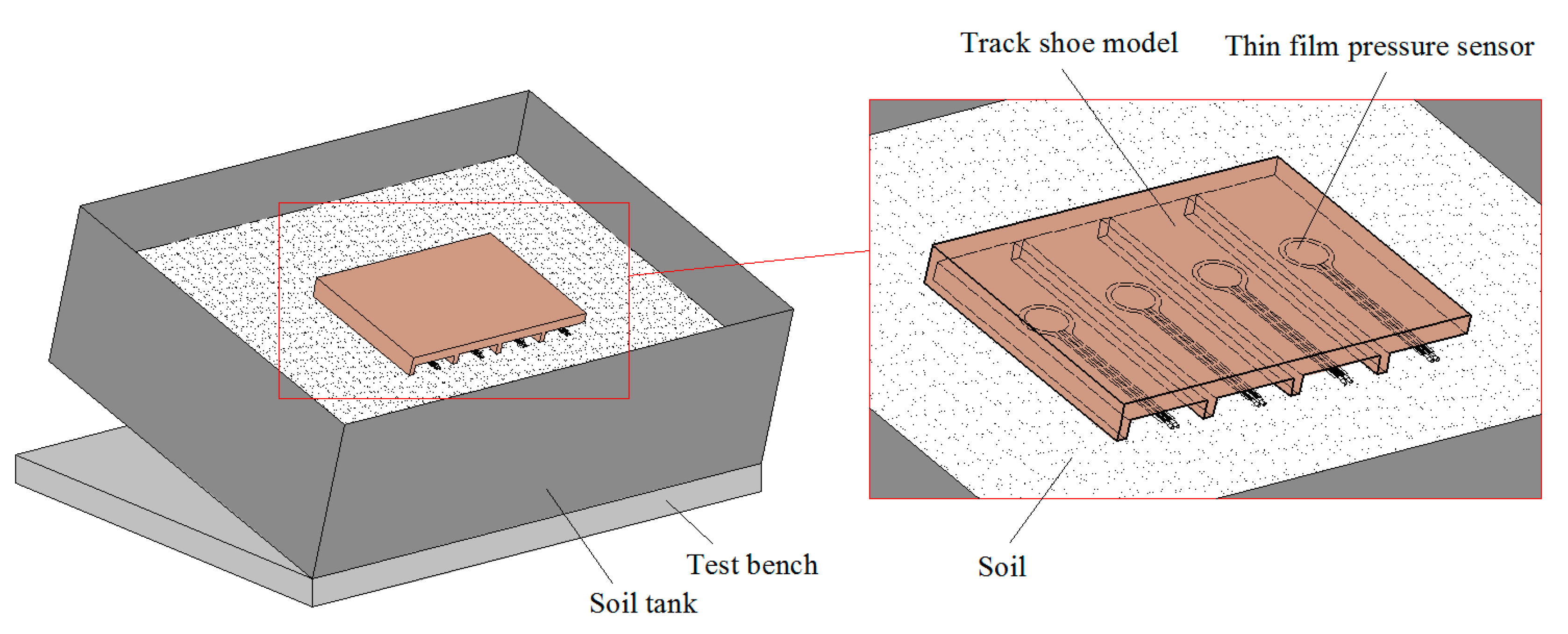
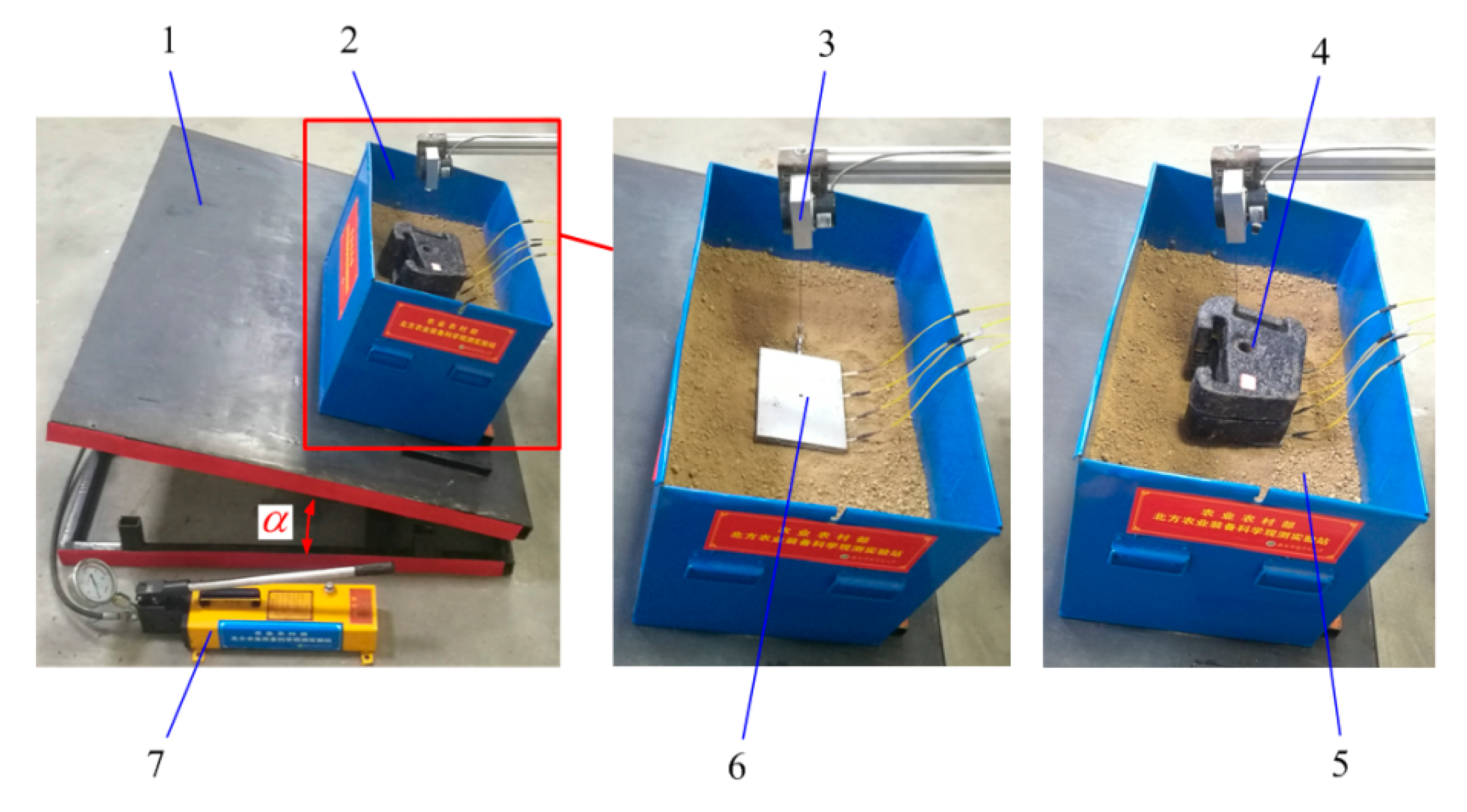
2.3.1. Test Scheme and Principle
2.3.2. Calculation of Soil Sinkage Parameters
3. Results and Discussion
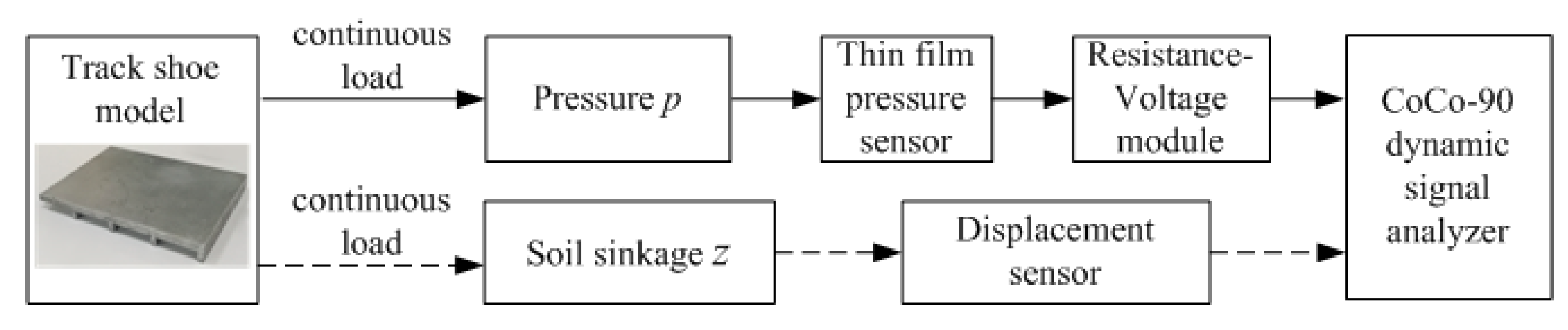
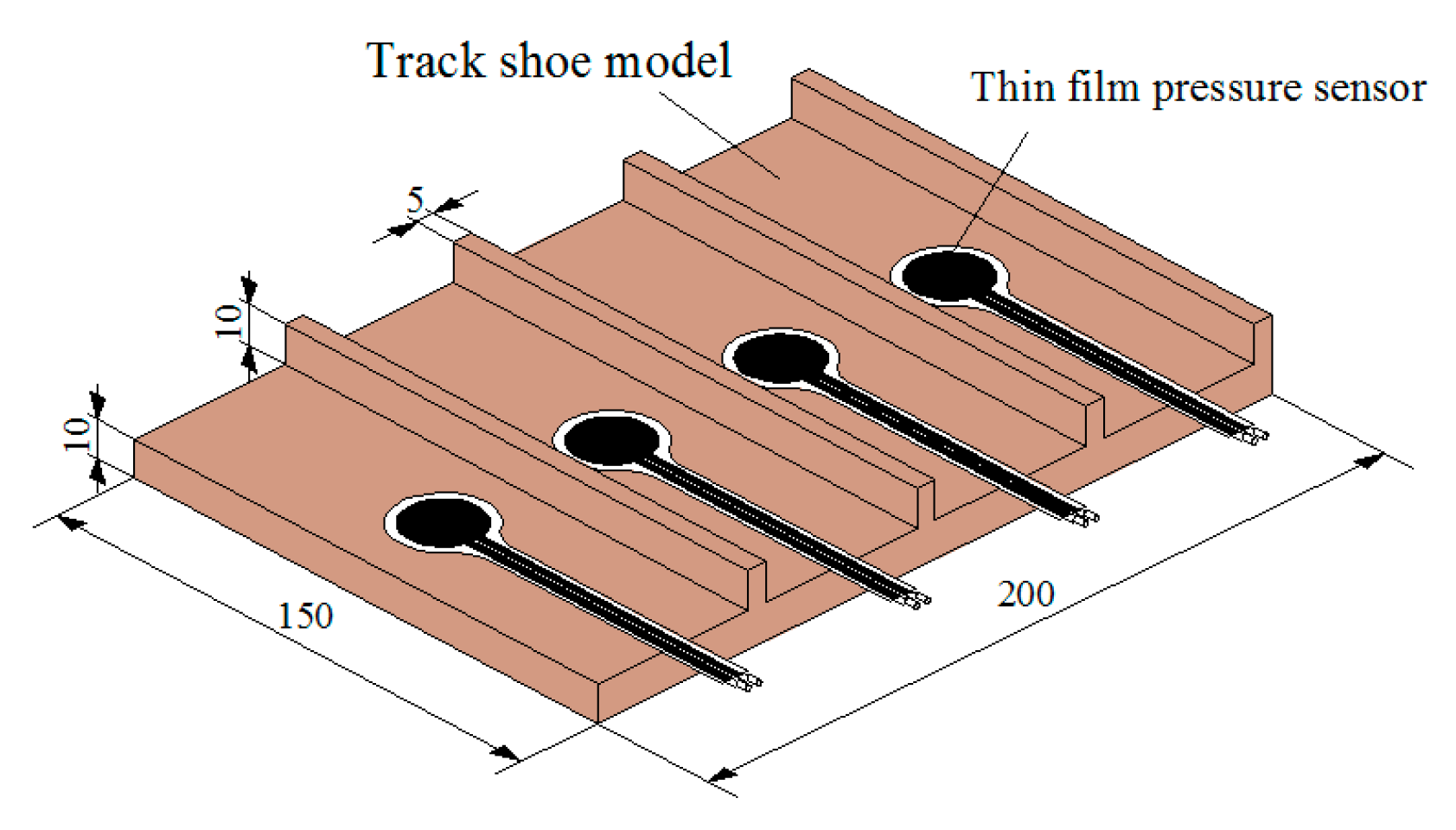
3.1. Static Test of Track Shoe Model
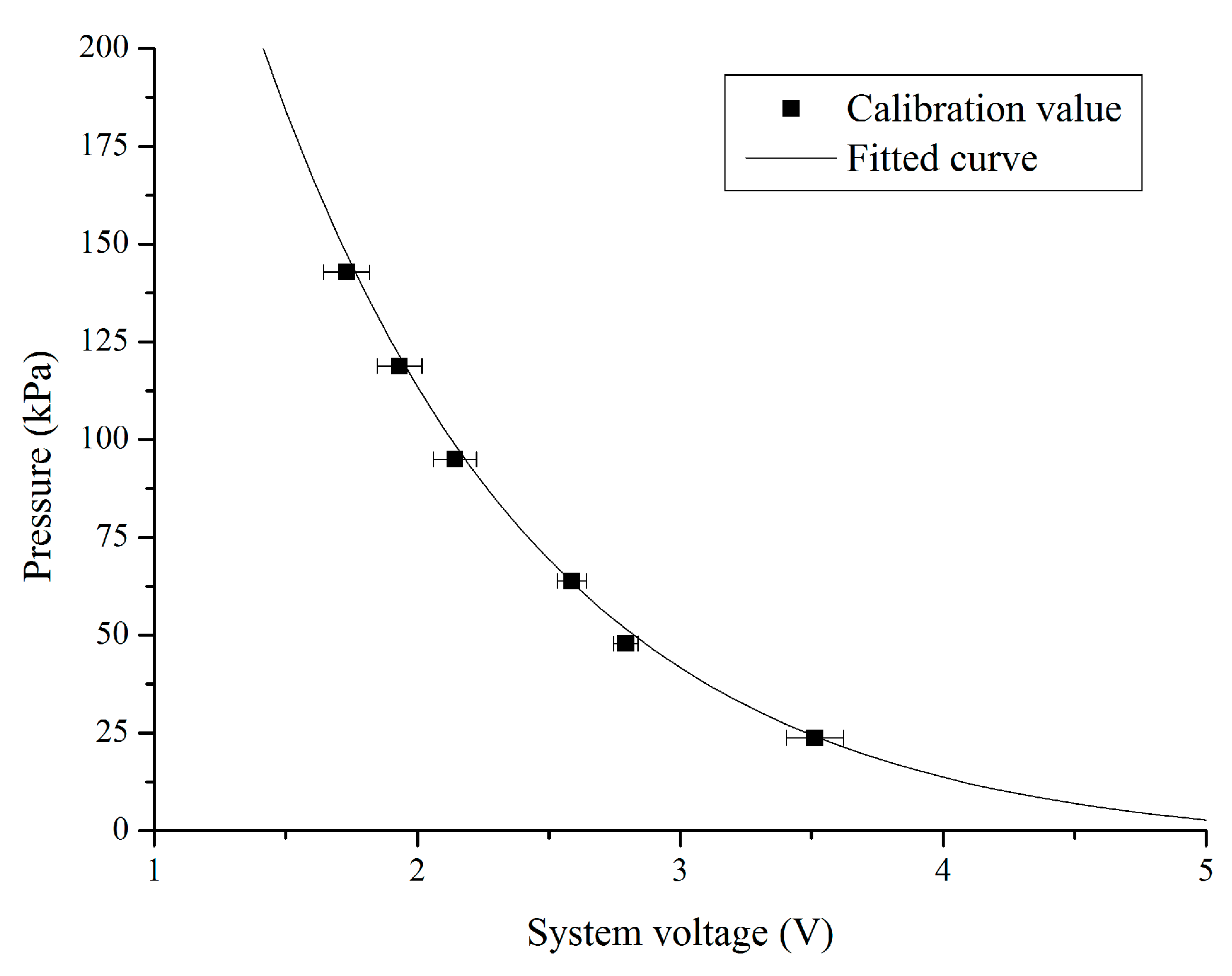
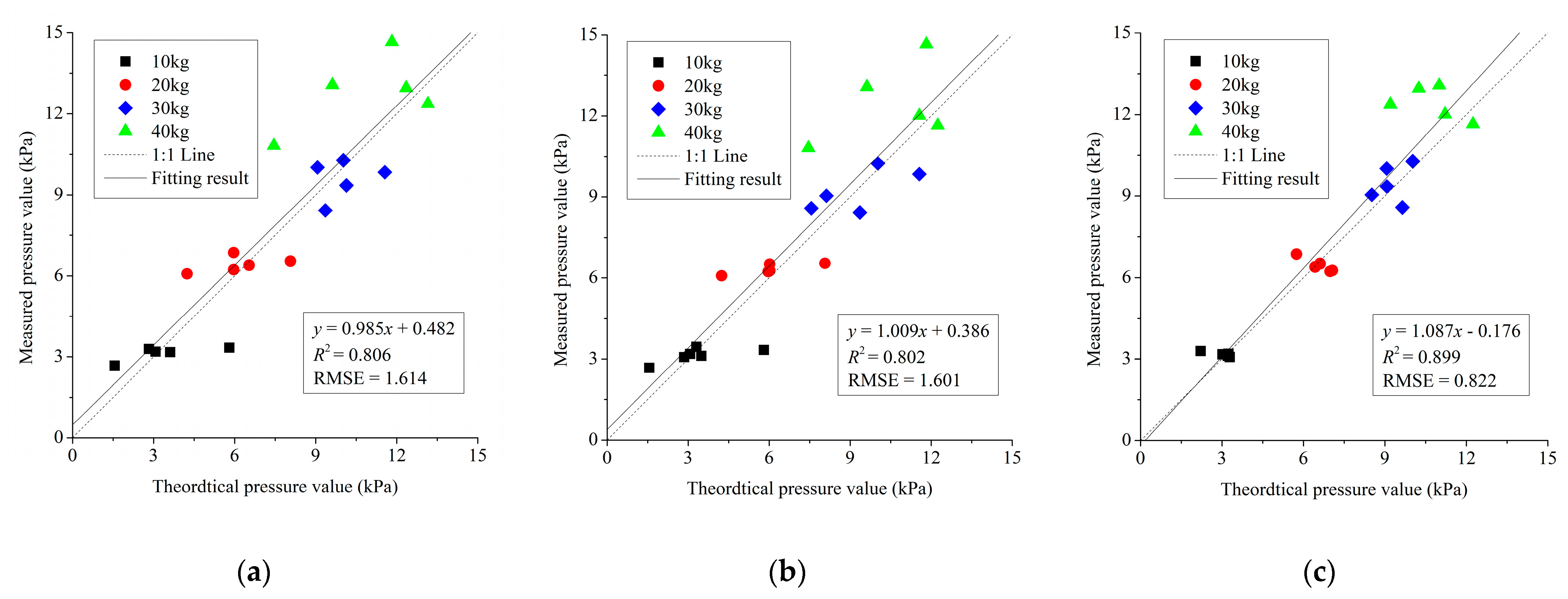
3.1.1. Sensor Calibration
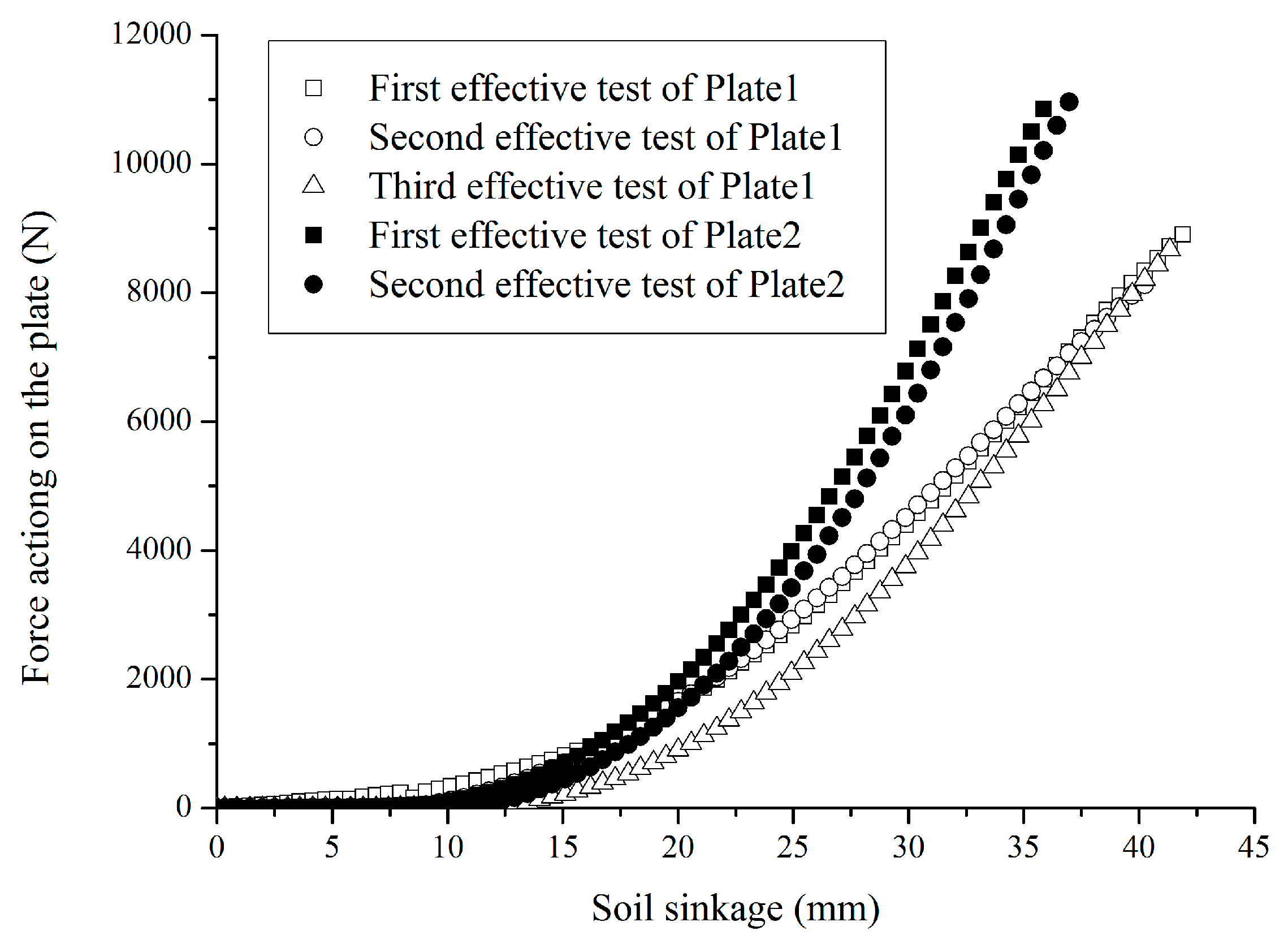
3.1.2. Verification Test of Track Shoe Model
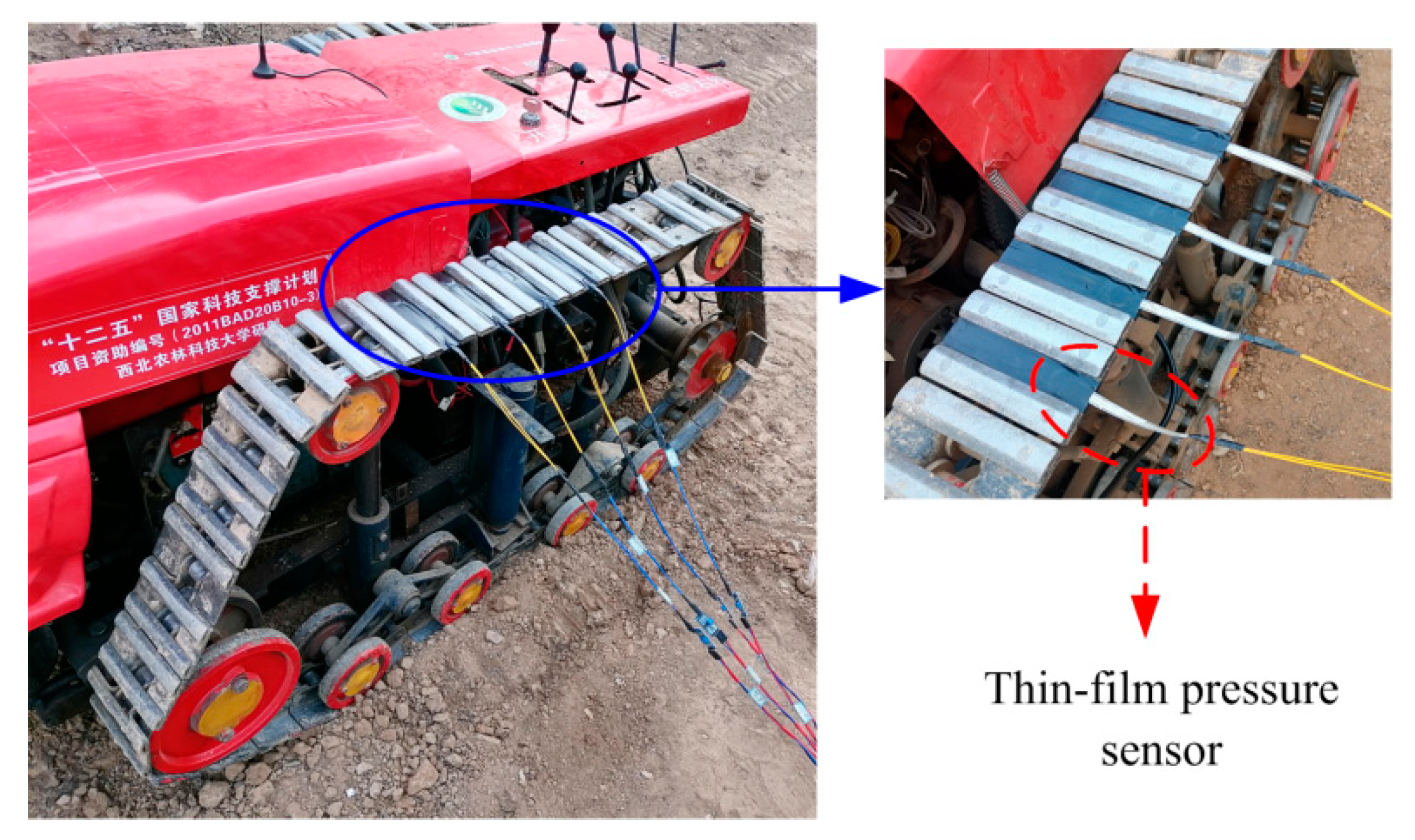
3.2. Dynamic Pressure Test of HMT Prototype
3.2.1. Pressure Test
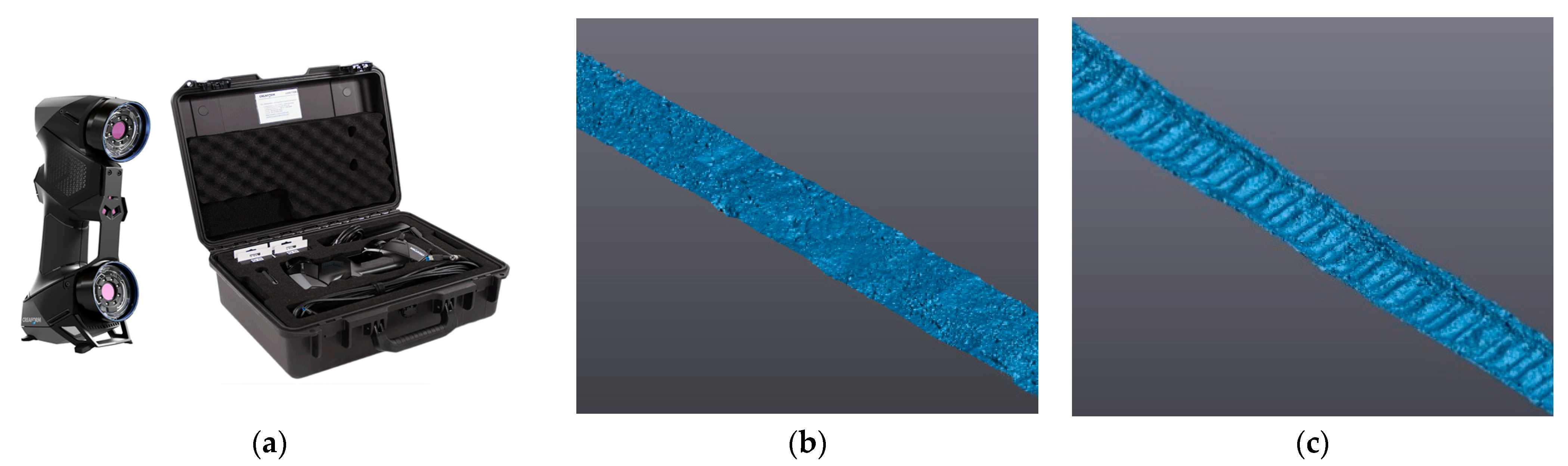
3.2.2. Measurement of Rut Depth
3.2.3. Analysis of Test Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.J.; Yang, F.Z.; Pan, G.T.; Liu, H.Y.; Liu, Z.J.; Zhang, J.Q. Design and testing of a small remote-control hillside tractor. Trans. ASABE 2014, 57, 363–370. [Google Scholar] [CrossRef]
- Luoyang Tractor Research Institute, Ministry of Machinery and Electronics Industry, China. Tractor Design Manual, 1st ed.; China Machine Press: Beijing, China, 1994; Volume 1, p. 200. (In Chinese) [Google Scholar]
- Zhang, Z.W.; Yang, F.Z.; Zhang, Z.P. Analysis on Driving Stability of Caterpillar Tractor on Ramp. Agric. Equip. Veh. Eng. 2010, 11, 7–10. (In Chinese) [Google Scholar] [CrossRef]
- Evans, I. The sinkage of tracked vehicles on soft ground. J. Terramech. 1964, 1, 33–43. [Google Scholar] [CrossRef]
- Uffelmann, F.L.; Evans, I. The performance of heavy tracked vehicles on soft cohesive soil. J. Terramech. 1965, 2, 33–45. [Google Scholar] [CrossRef]
- Mason, G.L.; Salmon, J.E.; Mcleod, S.; Jayakumar, P.; Smith, W. An overview of methods to convert cone index to bevameter parameters. J. Terramech. 2020, 87, 1–9. [Google Scholar] [CrossRef]
- Shaikh, S.A.; Li, Y.M.; Zheng, M.; Chandio, F.A.; Ahmad, F.; Tunio, M.H.; Abbas, I. Effect of grouser height on the tractive performance of single grouser shoe under different soil moisture contents in clay loam terrain. Sustainability 2021, 13, 1156. [Google Scholar] [CrossRef]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems; University of Michigan Press: Ann Arbor, MI, USA, 1969. [Google Scholar]
- He, R.; Sandu, C.; Khan, S.K.; Guthrie, A.G.; Els, P.S.; Hamersma, H.A. Review of terramechanics models and their applicability to real-time applications. J. Terramech. 2019, 81, 3–22. [Google Scholar] [CrossRef]
- Yang, C.B.; Yang, G.; Liu, Z.F.; Chen, H.X.; Zhao, Y.S. A method for deducing pressure-sinkage of tracked vehicle in rough terrain considering moisture and sinkage speed. J. Terramech. 2018, 79, 99–113. [Google Scholar] [CrossRef]
- Reece, A.R. Principles of soil-vehicle mechanics. Proc. Inst. Mech. Eng. Automob. Div. Part 2A 1965, 180, 45–67. [Google Scholar] [CrossRef]
- Onafeko, O.; Reece, A.R. Soil stresses and deformations beneath rigid wheels. J. Terramech. 1967, 4, 59–80. [Google Scholar] [CrossRef]
- Ageikin, J.S. Off-the-Road Wheeled and Combined Traction Devices: Theory and Calculation; Amerind Publishing Company: New Delhi, India, 1987. [Google Scholar]
- Lyasko, M. LSA model for sinkage predictions. J. Terramech. 2010, 47, 1–19. [Google Scholar] [CrossRef]
- Yao, M.; Ding, Q.S.; Zhou, J. Pressure-sinkage Characteristic Model of Remolded Soil. Trans. Chin. Soc. Agric. Mach. 2010, 41, 40–45. (In Chinese) [Google Scholar] [CrossRef]
- Zhao, J.F.; Wang, W.; Sun, Z.X.; Su, X.J. Improvement and verification of pressure-sinkage model in homogeneous soil. Trans. CSAE 2016, 32, 60–66. (In Chinese) [Google Scholar] [CrossRef]
- Zou, M.; Li, J.Q.; He, L.; Li, H.; Zhang, X.D.; Zhou, G.F. Experimental study on the pressure-sinkage characteristic of the simulant lunar regolith with different partical size distributions. Acta Aeronaut. Astronaut. Sin. 2012, 33, 2338–2346. (In Chinese) [Google Scholar] [CrossRef]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Chen, B.C.; Fan, Y.C.; Ning, S.J. Research on the running resistance of tracked vehicles. J. Jilin. Univ. Technol. Nat. Sci. Ed. 1983, 3, 19–34. (In Chinese) [Google Scholar] [CrossRef]
- Deng, S.Q. Soil mineral particles and soil texture. Soil 1983, 1, 36–39. (In Chinese) [Google Scholar]
- Bekker, M.G. Off-the-Road Locomotion: Research and Development in Terramechanics; University of Michigan Press: Ann Arbor, MI, USA, 1960. [Google Scholar]
- O’Sullivan, M.F.; Henshall, J.K.; Dickson, J.W. A simplified method for estimating soil compaction. Soil Tillage Res. 1999, 49, 325–335. [Google Scholar] [CrossRef]
- Yang, C.B.; Cai, L.G.; Liu, Z.F.; Tian, Y.; Zhang, C.X. A calculation method of track shoe thrust on soft ground for splayed grouser. J. Terramech. 2016, 65, 38–48. [Google Scholar] [CrossRef]
- Pan, G.T.; Yang, F.Z.; Dun, J.B.; Liu, Z.J. Analysis and Test of Obstacle Negotiation Performance of Small Hillside Crawler Tractor during Climbing Process. Trans. Chin. Soc. Agric. Mach. 2020, 51, 374–383. (In Chinese) [Google Scholar] [CrossRef]
- Wong, J.Y. Data processing methodology in the characterization of the mechanical properties of terrain. J. Terramech. 1980, 17, 13–41. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Place of Sampling | Sample No. | Content Percentage of Soil Particle Size (%) | Texture Grading | ||
|---|---|---|---|---|---|
| Clay | Silt | Sand | |||
| (d < 0.002) | (d = 0.002–0.02) | (d = 0.02–2) | |||
| Yangling, Shaanxi | 1 | 31.82 | 35.58 | 32.60 | Loamy clay |
| Yangxian, Shaanxi | 2 | 38.49 | 33.67 | 27.84 | Loamy clay |
| Huining, Gansu | 3 | 23.11 | 30.78 | 46.11 | Clay Loam |
| Jingning, Gansu | 4 | 24.50 | 28.75 | 46.75 | Clay loam |
| Depth of Sampling (cm) | Sample No. | Average Soil Water Content (%) | Average Density (mg·m−3) |
|---|---|---|---|
| 0–10 | 5 | 5.6 | 1.84 |
| 10–20 | 5 | 7.1 | 2.26 |
| 20–30 | 5 | 7.9 | 1.98 |
| Type | Name | Specification |
|---|---|---|
| Pressurized equipment and devices | DDL10 testing machine | Range < 10 kN |
| No. 1 circular plate | Radius of 80 mm | |
| No. 2 circular plate | Radius of 100 mm | |
| Soil tank | Length × width × height = 650 × 400 × 400 mm | |
| Angle measuring device | Inclinometer | |
| Soil preparation tools | Shovel, scrape board | |
| Soil water content measuring equipment | Soil moisture meter | TZS-2X-G |
| Encoding | Factors | ||
|---|---|---|---|
| Soil Water Content X1 (%) | Bulk Density X2 (mg·m−3) | Slope Angle X3 (°) | |
| −1.682 | 4.0 | 1.5 | 0 |
| −1 | 6.4 | 1.7 | 4 |
| 0 | 10.0 | 2.0 | 10 |
| 1 | 13.6 | 2.3 | 16 |
| 1.682 | 16.0 | 2.5 | 20 |
| Test No. | Soil Water Content X1 | Bulk Density X2 | Slope Angle X3 | Sinkage Exponent Y1 | Cohesive Modulus Y2 | Friction Modulus Y3 |
|---|---|---|---|---|---|---|
| 1 | −1 | −1 | −1 | 1.3748 | 324 | 9406 |
| 2 | 1 | −1 | −1 | 1.4824 | 382 | 12,084 |
| 3 | −1 | 1 | −1 | 1.5059 | 468 | 9573 |
| 4 | 1 | 1 | −1 | 1.6628 | 528 | 12,658 |
| 5 | −1 | −1 | 1 | 1.8626 | 673 | 5528 |
| 6 | 1 | −1 | 1 | 1.8359 | 752 | 9016 |
| 7 | −1 | 1 | 1 | 1.8191 | 780 | 6023 |
| 8 | 1 | 1 | 1 | 1.7628 | 816 | 12,420 |
| 9 | −1.682 | 0 | 0 | 1.5703 | 228 | 6429 |
| 10 | 1.682 | 0 | 0 | 1.6425 | 318 | 13,029 |
| 11 | 0 | −1.682 | 0 | 1.6686 | 809 | 9560 |
| 12 | 0 | 1.682 | 0 | 1.7028 | 998 | 10,516 |
| 13 | 0 | 0 | −1.682 | 1.4064 | 436 | 11,806 |
| 14 | 0 | 0 | 1.682 | 1.9217 | 984 | 6487 |
| 15 | 0 | 0 | 0 | 1.7259 | 1298 | 10,131 |
| 16 | 0 | 0 | 0 | 1.7262 | 1305 | 10,052 |
| 17 | 0 | 0 | 0 | 1.7301 | 1310 | 10,198 |
| 18 | 0 | 0 | 0 | 1.7108 | 1296 | 9972 |
| 19 | 0 | 0 | 0 | 1.6991 | 1308 | 11,007 |
| 20 | 0 | 0 | 0 | 1.6311 | 1311 | 10,155 |
| 21 | 0 | 0 | 0 | 1.6925 | 1296 | 10,239 |
| 22 | 0 | 0 | 0 | 1.7096 | 1303 | 9980 |
| 23 | 0 | 0 | 0 | 1.7305 | 1295 | 10,054 |
| Variance | Sinkage Exponent | Cohesive Modulus | Friction Modulus | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Quadratic Sum | Degree of Freedom | F | p | Quadratic Sum | Degree of Freedom | F | p | Quadratic Sum | Degree of Freedom | F | p | |
| Model | 0.400 | 9 | 57.30 | <0.01 *** | 3.50 × 106 | 9 | 7945.82 | <0.01 *** | 9.11 × 107 | 9 | 63.66 | <0.01 *** |
| X1 | 6.72 × 10−3 | 1 | 8.71 | 0.0112 ** | 10817.55 | 1 | 221.17 | <0.01 *** | 5.23 × 107 | 1 | 329.53 | <0.01 *** |
| X2 | 4.6 × 10−3 | 1 | 6.05 | 0.0287 ** | 44418.80 | 1 | 908.14 | <0.01 *** | 2.85 × 106 | 1 | 17.98 | <0.01 *** |
| X3 | 0.330 | 1 | 427.06 | <0.01 *** | 3.68 × 105 | 1 | 7515.79 | <0.01 *** | 2.84 × 107 | 1 | 178.38 | <0.01 *** |
| X1 × 2 | 4.85 × 10−5 | 1 | 0.063 | 0.8059 | 210.13 | 1 | 4.30 | 0.0586 * | 1.37 × 106 | 1 | 8.65 | 0.0115 ** |
| X1X3 | 0.015 | 1 | 19.57 | <0.01 *** | 1.13 | 1 | 0.023 | 0.8818 | 2.12 × 106 | 1 | 13.36 | <0.01 *** |
| X2X3 | 0.023 | 1 | 29.70 | <0.01 *** | 1770.13 | 1 | 36.19 | <0.01 *** | 1.25 × 106 | 1 | 7.84 | 0.015 ** |
| 0.017 | 1 | 21.45 | <0.01 *** | 2.10 × 106 | 1 | 42916.14 | <0.01 *** | 4.55 × 105 | 1 | 2.86 | 0.1145 | |
| 2.85 × 10−4 | 1 | 0.37 | 0.5536 | 3.14 × 105 | 1 | 6417.35 | <0.01 *** | 57162.63 | 1 | 0.36 | 0.5591 | |
| 2.25 × 10−3 | 1 | 2.91 | 0.1117 | 3.94 × 105 | 1 | 14185.06 | <0.01 *** | 2.24 × 106 | 1 | 14.07 | <0.01 *** | |
| Residual error | 0.01 | 13 | 635.85 | 13 | 2.07 × 106 | 13 | ||||||
| Lack of fit | 2.17 × 10−3 | 5 | 0.44 | 0.8086 | 309.63 | 5 | 1.52 | 0.2851 | 1.26 × 106 | 5 | 2.52 | 0.1181 |
| Error | 7.86 × 10−3 | 8 | 326.22 | 8 | 8.03 × 105 | 8 | ||||||
| Sum | 0.410 | 22 | 22 | 9.31 × 107 | 22 | |||||||
| No. | Vertical Load/kg | ||||||
|---|---|---|---|---|---|---|---|
| 0.761 | 1.533 | 2.045 | 3.045 | 3.806 | 4.578 | ||
| Output voltage | 1 | 3.926 | 3.102 | 2.715 | 2.210 | 1.962 | 1.789 |
| 2 | 3.728 | 3.025 | 2.642 | 2.259 | 1.926 | 1.718 | |
| 3 | 3.696 | 3.067 | 2.583 | 2.108 | 1.980 | 1.733 | |
| 4 | 3.936 | 3.150 | 2.722 | 2.236 | 2.011 | 1.847 | |
| 5 | 4.039 | 3.100 | 2.738 | 2.304 | 2.056 | 1.894 | |
| 6 | 3.986 | 3.152 | 2.684 | 2.209 | 1.989 | 1.793 | |
| 7 | 3.864 | 3.087 | 2.748 | 2.211 | 2.027 | 1.881 | |
| 8 | 3.921 | 3.137 | 2.868 | 2.214 | 2.033 | 1.834 | |
| 9 | 4.024 | 2.983 | 2.726 | 2.307 | 2.065 | 1.799 | |
| 10 | 3.904 | 3.163 | 2.798 | 2.375 | 2.063 | 1.895 | |
| Mean value | 3.902 | 3.097 | 2.722 | 2.243 | 2.011 | 1.818 | |
| Standard deviation | 0.108 | 0.056 | 0.074 | 0.069 | 0.044 | 0.060 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, G.; Sun, J.; Wang, X.; Yang, F.; Liu, Z. Construction and Experimental Verification of Sloped Terrain Soil Pressure-Sinkage Model. Agriculture 2021, 11, 243. https://doi.org/10.3390/agriculture11030243
Pan G, Sun J, Wang X, Yang F, Liu Z. Construction and Experimental Verification of Sloped Terrain Soil Pressure-Sinkage Model. Agriculture. 2021; 11(3):243. https://doi.org/10.3390/agriculture11030243
Chicago/Turabian StylePan, Guanting, Jingbin Sun, Xiaole Wang, Fuzeng Yang, and Zhijie Liu. 2021. "Construction and Experimental Verification of Sloped Terrain Soil Pressure-Sinkage Model" Agriculture 11, no. 3: 243. https://doi.org/10.3390/agriculture11030243
APA StylePan, G., Sun, J., Wang, X., Yang, F., & Liu, Z. (2021). Construction and Experimental Verification of Sloped Terrain Soil Pressure-Sinkage Model. Agriculture, 11(3), 243. https://doi.org/10.3390/agriculture11030243