
WSPM-System: Providing Real Data of Rotor Speed and Pitch Angle for Numerical Simulation of Downwash Airflow from a Multirotor UAV Sprayer




Abstract
:1. Introduction
2. Materials and Methods
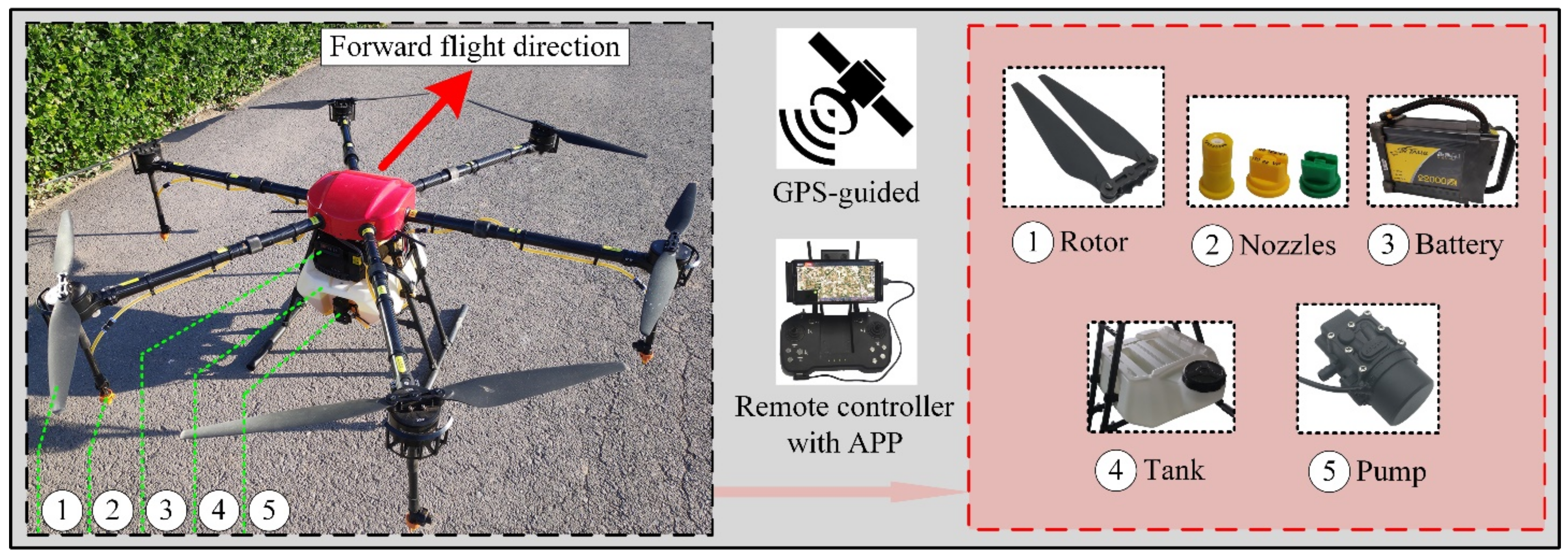
2.1. Multirotor UAV Sprayer
2.2. Wireless Measurement System
2.2.1. Hardware Design
2.2.2. Software Design
2.3. Experiment Scheme
2.3.1. Wireless Simulation Parameter Measurement System Test Experiment
2.3.2. Simulation Parameters Measurement Experiment
2.3.3. Numerical Simulation of Downwash Airflow
2.4. Data Analysis Method
2.4.1. Optimized Extraction of Simulation Parameter Data
2.4.2. Analysis Method of Collected Data Stability
2.4.3. Regression Analysis
2.4.4. Numerical Approach to Validation
3. Results
3.1. Performance Test of the WSPM-System
3.2. Simulation Parameters in Hovering
3.3. Simulation Parameters in Forward Flight
3.4. Simulation Results of Downwash Airflow
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Soheilifard, F.; Marzban, A.; Raini, M.G.; Taki, M.; Zelm, R. Chemical footprint of pesticides used in citrus orchards based on canopy deposition and off-target losses. Sci. Total. Environ. 2020, 732, 139118. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in east Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar] [CrossRef]
- Xue, X.; Tu, K.; Qin, W.; Lan, Y.; Zhang, H. Drift and deposition of ultra-low altitude and low volume application in paddy field. Int. J. Agric. Biol. Eng. 2014, 7, 23–28. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, S.; Zhao, C.; Chen, L.; Lan, Y.; Tan, Y. Modelling operation parameters of UAV on spray effects at different growth stages of corns. Int. J. Agric. Biol. Eng. 2017, 10, 57–66. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Qi, H.; Chen, P.; Hewitt, A.; Han, Y. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest. Manag. Sci. 2019, 75, 1546–1555. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Ouyang, F.; Wang, G.; Qi, H.; Xu, W.; Yang, W.; Zhang, Y.; Lan, Y. Droplet distributions in cotton harvest aid applications vary with the interactions among the unmanned aerial vehicle spraying parameters. Ind. Crop. Prod. 2021, 163, 113324. [Google Scholar] [CrossRef]
- Tang, Y.; Hou, C.J.; Luo, S.M.; Lin, J.T.; Yang, Z.; Huang, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 1–7. [Google Scholar] [CrossRef]
- Hou, C.; Tang, Y.; Luo, S.; Lin, J.; He, Y.; Zhuang, J.; Huang, W. Optimization of control parameters of droplet density in citrus trees using UAVs and the Taguchi method. Int. J. Agric. Biol. Eng. 2019, 12, 1–9. [Google Scholar] [CrossRef]
- Jorge, M.; Pablo, A.; Juan, A.; Manuel, P. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2019, 21, 226–243. [Google Scholar] [CrossRef]
- Meng, Y.; Su, J.; Song, J.; Chen, W.H.; Lan, Y. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron. Agric. 2020, 170, 105282. [Google Scholar] [CrossRef]
- Xuan, L.; Giles, D.K.; Niederholzer, F.J.; Andaloro, J.T.; Lang, E.B.; Watson, L.J. Evaluation of an unmanned aerial vehicle as a new method of pesticide application for almond crop protection. Pest Manag. Sci. 2021, 77, 527–537. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Han, X.; Chen, S.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total. Environ. 2020, 737, 139793. [Google Scholar] [CrossRef]
- Kharim, M.N.A.; Wayayok, A.; Shariff, A.R.M.; Abdullah, A.F.; Husin, E.M. Droplet deposition density of organic liquid fertilizer at low altitude UAV aerial spraying in rice cultivation. Comput. Electron. Agric. 2019, 167, 105045. [Google Scholar] [CrossRef]
- Teske, A.L.; Chen, G.; Nansen, C.; Kong, Z. Optimised dispensing of predatory mites by multirotor UAVs in wind: A distribution pattern modelling approach for precision pest management. Biosyst. Eng. 2019, 187, 226–238. [Google Scholar] [CrossRef]
- Wu, Z.; Li, M.; Lei, X.; Wu, Z.; Jiang, C.; Zhou, L.; Ma, R.; Chen, Y. Simulation and parameter optimisation of a centrifugal rice seeding spreader for a UAV. Biosyst. Eng. 2020, 192, 275–293. [Google Scholar] [CrossRef]
- Albert, S.; Amarilla, A.A.; Trollope, B.; Sng, J.D.J.; Setoh, Y.X.; Deering, N.; Modhiran, N.; Weng, S.H.; Melo, M.C.; Hutley, N.; et al. Assessing the potential of unmanned aerial vehicle spraying of aqueous ozone as an outdoor disinfectant for SARS-CoV-2. Environ. Res. 2021, 196, 110944. [Google Scholar] [CrossRef]
- Zhang, H.; Lan, Y.; Wen, S.; Xu, T.; Yu, F. Research progress in rotor airflow model of plant protection UAV and droplet motion mechanism. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–12. [Google Scholar] [CrossRef]
- Nienstedt, K.M.; Brock, T.C.M.; Wensem Joke Montforts, M.; Hart, A.; Aagaard, A.; Alix, A.; Boesten, J.; Bopp, S.K.; Brown Colin Capri, E.; Forbes, V.; et al. Development of a framework based on an ecosystem services approach for deriving specific protection goals for environmental risk assessment of pesticides. Sci. Total. Environ. 2012, 415, 31–38. [Google Scholar] [CrossRef] [Green Version]
- Pullan, S.P.; Whelan, M.J.; Rettino, J.; Filby, K.; Eyre, S.; Holman, I.P. Development and application of a catchment scale pesticide fate and transport model for use in drinking water risk assessment. Sci. Total. Environ. 2016, 563–564, 434–447. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sybertz, A.; Ottermanns, R.; Schäffer, A.; Scholz-Starke, B.; Daniels, B.; Frische, T.; Bär, S.; Ullrich, C.; Roß-Nickoll, M. Simulating spray series of pesticides in agricultural practice reveals evidence for accumulation of environmental risk in soil. Sci. Total. Environ. 2020, 710, 135004. [Google Scholar] [CrossRef]
- Ellis, M.C.B.; van de Zande, J.C.; van den Berg, F.; Kennedy, M.C.; O’Sullivan, C.M.; Jacobs, C.M.; Fragkoulis, G.; Spanoghe, P.; Gerritsen-Ebben, R.; Frewer, L.J.; et al. The BROWSE model for predicting exposures of residents and bystanders to agricultural use of plant protection products: An overview. Biosyst. Eng. 2017, 154, 92–104. [Google Scholar] [CrossRef] [Green Version]
- European Union. Regulation (EC) No 1107/2009 of the European parliament and of the council of 21 October 2009 concerning the placing of plant protection products on the market and repealing council directives 79/117/EEC and 91/414/EEC. Off. J. Eur. Union. 2009, 309, 1–50. [Google Scholar]
- European Union. Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 establishing a framework for Community action to achieve the sustainable use of pesticides. Off. J. Eur. Union. 2009, 309, 71–86. [Google Scholar]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total. Environ. 2021, 777, 146181. [Google Scholar] [CrossRef] [PubMed]
- Qi, L.; Fu, Z. The droplet distribution on apple trees atomized by an air-assisted sprayer. Trans. Chin. Soc. Agric. Eng. 1998, 14, 135–139. [Google Scholar]
- Gu, J.; Zhu, H.; Ding, W. Unimpeded air velocity profiles of an air-assisted five port sprayer. Trans. ASABE 2012, 55, 1659–1666. [Google Scholar] [CrossRef]
- Hong, S.; Zhao, L.; Zhu, H. CFD simulation of airflow inside tree canopies discharged from air-assisted sprayers. Comput. Electron. Agric. 2018, 149, 121–132. [Google Scholar] [CrossRef]
- Hao, Z.; Lijun, Q.; Yalei, W.; Musiu, E.M.; Zhenzhen, C.; Pei, W. Numerical simulation of airflow field from a six–rotor plant protection drone using lattice Boltzmann method. Biosyst. Eng. 2020, 197, 336–351. [Google Scholar] [CrossRef]
- Li, J.; Shi, Y.; Lan, Y.; Guo, S. Vertical distribution and vortex structure of rotor wind field under the influence of rice canopy. Comput. Electron. Agric. 2019, 159, 140–146. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, D.; Mao, H.; Shen, B.; Li, M. Wind-induced response of rice under the action of the downwash flow field of a multi-rotor UAV. Biosyst. Eng. 2021, 203, 60–69. [Google Scholar] [CrossRef]
- Tian, Z.; Xue, X.; Xu, Y.; Yang, F.; Sun, Z. Effect of plant protection UAVs downwash on crop canopy. Trans. Chin. Soc. Agric. Mach. 2021, 52, 40–48. [Google Scholar]
- Hu, L.; Zhou, Z.; Luo, X.; Wang, P.; Yan, Y.; Li, J. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter. Trans. Chin. Soc. Agric. Mach. 2014, 45, 221–226. [Google Scholar]
- Chen, S.; Lan, Y.; Bradley, K.F.; Li, J.; Liu, A.; Mao, Y. Effect of wind field below rotor on distribution of aerial spraying droplet deposition by using multi-rotor UAV. Trans. Chin. Soc. Agric. Mach. 2017, 48, 105–113. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Ding, C.; Chen, L.; Xu, M.; Xu, G.; Yi, T.; Wen, Y.; Li, L.; Deng, W. Application of ultrasonic anemometer array to field measurements of the downwash flow of an agricultural unmanned helicopter. Trans. ASABE 2019, 62, 1219–1230. [Google Scholar] [CrossRef]
- Richardson, B.; Rolando, C.A.; Kimberley, M.O.; Strand, T.M. Spray application efficiency from a multi-rotor unmanned aerial vehicle configured for aerial pesticide application. Trans. ASABE 2019, 62, 1447–1453. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Lan, Y.; Yin, X.; Lu, Y. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle. Trans. Chin. Soc. Agric. Mach. 2018, 49, 127–160. [Google Scholar] [CrossRef]
- Tang, Q.; Zhang, R.; Chen, L.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Numerical simulation of the downwash flow field and droplet movement from an unmanned helicopter for crop spraying. Comput. Electron. Agric. 2020, 174, 105468. [Google Scholar] [CrossRef]
- Tang, Q.; Chen, L.; Zhang, R.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Effects of application height and crosswind on the crop spraying performance of unmanned helicopters. Comput. Electron. Agric. 2021, 181, 105961. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Ning, Z.; Lan, Y.; Yin, X.; Zhang, J.; Ge, Y. Numerical analysis and validation of spray distributions disturbed by quad-rotor drone wake at different flight speeds. Comput. Electron. Agric. 2019, 166, 105036. [Google Scholar] [CrossRef]
- Qiang, S.; Yulei, P.; Beibei, H.; Huaiqun, Z.; Da, L.; Baoguo, S.; Hanping, M. The airflow field characteristics of UAV flight in a greenhouse. Agriculture 2021, 11, 634. [Google Scholar] [CrossRef]
- Guo, Q.; Zhu, Y.; Tang, Y.; Hou, C.; He, Y.; Zhuang, J.; Zheng, Y.; Luo, S. CFD simulation and experimental verification of the spatial and temporal distributions of the downwash airflow of a quad-rotor agricultural UAV in hover. Comput. Electron. Agric. 2020, 172, 105343. [Google Scholar] [CrossRef]
- Fengbo, Y.; Xinyu, X.; Ling, Z.; Zhu, S. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 41–53. [Google Scholar] [CrossRef] [Green Version]
- Fengbo, Y.; Xinyu, X.; Chen, C.; Qingqing, Z. Effect of down wash airflow in hover on droplet motion law for multi–rotor unmanned plant protection machine. Trans. Chin. Soc. Agric. Eng. 2018, 34, 64–73. [Google Scholar] [CrossRef]
- Hao, Z.; Lijun, Q.; Yalei, W.; Wanwan, L.; Zhenzhen, C.; Musiu, E.M. Spatio–temporal distribution of down–wash airflow for multi–rotor plant protection UAV based on porous model. Trans. Chin. Soc. Agric. Mach. 2019, 50, 112–122. [Google Scholar]
- Hao, Z.; Lijun, Q.; Yalei, W.; Zhenzhen, C.; Wanwan, L.; Musiu, E.M.; Yu, X.; Zepeng, Y. Distribution characteristics of rotor downwash airflow field under spraying on orchard using unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2019, 35, 44–54. [Google Scholar]
- Shenghui, Y.; Xingxing, L.; Bingtai, C.; Shixiong, L.; Yongjun, Z. CFD models and verification of the downwash airflow of an eight-rotor UAV. In Proceedings of the 2019 ASABE Annual International Meeting Sponsored by ASABE, Boston, MA, USA, 7–10 July 2019. [Google Scholar] [CrossRef]
- Quan, Q. Modeling and evaluation of propulsion system. In Introduction to Multicopter Design and Control; Springer: Singapore, 2017. [Google Scholar] [CrossRef]
- Bangura, M.; Lim, H.; Kim, H.J.; Mahony, R. Aerodynamic power control for multirotor aerial vehicles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar] [CrossRef]
- Shi, D.; Dai, X.; Zhang, X.; Quan, Q. A practical performance evaluation method for electric multicopters. IEEE/ASME Trans. Mechatron. 2017, 22, 1337–1348. [Google Scholar] [CrossRef]
- Vitzilaios, N.I.; Tsourveloudis, N.C. An experimental test bed for small unmanned helicopters. J. Intell. Robot. Syst. 2009, 54, 769–794. [Google Scholar] [CrossRef]
- Hoffmann, F.; Goddemeier, N.; Bertram, T. Attitude estimation and control of a quadrocopter. In Proceedings of the 2010 IEEE/RSJ international, Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1072–1077. [Google Scholar] [CrossRef]
- Zang, Y.; He, X.; Zhou, Z.; Ming, R.; Zang, Y.; Luo, X.; Lan, Y. Comprehensive evaluation method for lifting characteristics of electric multi-rotor UAV for plant protection. Trans. Chin. Soc. Agric. Eng. 2018, 34, 69–77. [Google Scholar] [CrossRef]
- Dai, X.; Quan, Q.; Ren, J.; Cai, K. Efficiency optimization and component selection for propulsion systems of electric multicopters. IEEE Trans. Ind. Electron. 2019, 66, 7800–7809. [Google Scholar] [CrossRef]
- Matus-Vargas, A.; Rodriguez-Gomez, G.; Martinez-Carranza, J. Ground effect on rotorcraft unmanned aerial vehicles: A review. Intel. Serv. Robot. 2021, 14, 99–118. [Google Scholar] [CrossRef]
- Chen, R.; Jin, L.; Li, Z.; Zhang, J. A progressive approach for the detection of the coefficient of variation. Qual. Reliab. Eng. Int. 2021. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X.; Wang, L.; Deng, J.; Zeng, W.; Lan, Y.; Muhammad, N.T. Progress in foreign agricultural aviation electrostatic spray technologies and references for China. Trans. Chin. Soc. Agric. Eng. 2021, 37, 50–59. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications and Parameters | DF-16L |
|---|---|
| Length × Width × Height (mm) | 1156 × 1780 × 628 |
| No-load mass (kg) | 15.4 |
| Standard take-off mass (kg) | 37 |
| Maximum take-off mass (kg) | 42 |
| Tank capacity (L) | 16 |
| Wheelbase (mm) | 1640 |
| Rotor diameter (mm)/Number | 762/6 |
| Brushless motor (KV value) | 100 |
| Nozzles number a | 4 |
| Battery type/Capacity | Lithium—12S/22,000 mAh |
| Standard application time (min) | ≥17 |
| Full-load hover time (min) | ≥11 |
| Flight speed b (m s−1) | 1–7 |
| Operation height c (m) | 1–3 |
| Spray swath (m) | 4–6 |
| Items | Sensors | Wireless Module | Arduino Board | Lithium Battery | |||
|---|---|---|---|---|---|---|---|
| Hall | JY61 | USB-nRF24L01 | TTL-nRF24L01 | Mega 2560 | Exp-Board | ||
| Size (mm) | 39 × 10 | 15 × 15 | 60 × 18 | 50 × 15 | 101 × 54 | 101 × 54 | 135 × 80 × 40 |
| Working voltage (V) | 5 | 5 | 5 | 5 | 5 | 5 | 9 |
| Component | 3144 | MPU6050 | nRF24L01+ | ATmega2560 | |||
| Data detected a | n | θ | |||||
| Input (Output) voltage (V) | 7–12 (5 or 3.3) | (5, 9, or 12) 11,800 mAh | |||||
| Appearance |  |  |  |  |  |  |  |
| Case | Application Parameters | Computational Domain (m) | |||
|---|---|---|---|---|---|
| FA (m) | LG (kg) | Length | Width | Height | |
| 1 | 2 | 16 | 12 | 12 | 4 |
| 2 | 3 | 16 | 12 | 12 | 5 |
| 3 | 4 | 16 | 12 | 12 | 6 |
| 4 | 3 | 4 | 12 | 12 | 5 |
| 5 | 3 | 8 | 12 | 12 | 5 |
| 6 | 3 | 12 | 12 | 12 | 5 |
| Sampling Interval (s) | Communication Distance (m) | ||
|---|---|---|---|
| 80 | 100 | 120 | |
| 0.1 | - | <0.01 | <0.04 |
| 0.5 | - | <0.01 | <0.03 |
| 1.0 | - | <0.01 | <0.03 |
| Items | Rotor Speed (rpm) | Pitch Angle (°) | ||||||
|---|---|---|---|---|---|---|---|---|
| Text.1 | Text.2 | Text.3 | Text.4 | Text.5 | 0 | 5 | 10 | |
| M ± SD | 862 ± 4 862 ± 3 * | 1619 ± 23 1608 ± 17 * | 2543 ± 22 2534 ± 20 * | 3436 ± 20 3435 ± 18 * | 4580 ± 23 4574 ± 27 * | 0.36 ± 0.01 | 4.97 ± 0.01 | 10.14 ± 0.01 |
| CV | 0.46% 0.33% * | 1.42% 1.05% * | 0.87% 0.80% * | 0.58% 0.51% * | 0.51% 0.58% * | 1.82% | 0.15% | 0.10% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Qi, L.; Wan, J.; Musiu, E.M.; Zhou, J.; Lu, Z.; Wang, P. WSPM-System: Providing Real Data of Rotor Speed and Pitch Angle for Numerical Simulation of Downwash Airflow from a Multirotor UAV Sprayer. Agriculture 2021, 11, 1038. https://doi.org/10.3390/agriculture11111038
Zhang H, Qi L, Wan J, Musiu EM, Zhou J, Lu Z, Wang P. WSPM-System: Providing Real Data of Rotor Speed and Pitch Angle for Numerical Simulation of Downwash Airflow from a Multirotor UAV Sprayer. Agriculture. 2021; 11(11):1038. https://doi.org/10.3390/agriculture11111038
Chicago/Turabian StyleZhang, Hao, Lijun Qi, Junjie Wan, Elizabeth M. Musiu, Jiarui Zhou, Zhongao Lu, and Pei Wang. 2021. "WSPM-System: Providing Real Data of Rotor Speed and Pitch Angle for Numerical Simulation of Downwash Airflow from a Multirotor UAV Sprayer" Agriculture 11, no. 11: 1038. https://doi.org/10.3390/agriculture11111038
APA StyleZhang, H., Qi, L., Wan, J., Musiu, E. M., Zhou, J., Lu, Z., & Wang, P. (2021). WSPM-System: Providing Real Data of Rotor Speed and Pitch Angle for Numerical Simulation of Downwash Airflow from a Multirotor UAV Sprayer. Agriculture, 11(11), 1038. https://doi.org/10.3390/agriculture11111038