
Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination


Abstract
1. Introduction
2. Materials and Methods
2.1. Membrane Geometry
2.2. Numerical Method
3. Results and Discussion
3.1. Surface Tension—Young–Laplace Benchmark
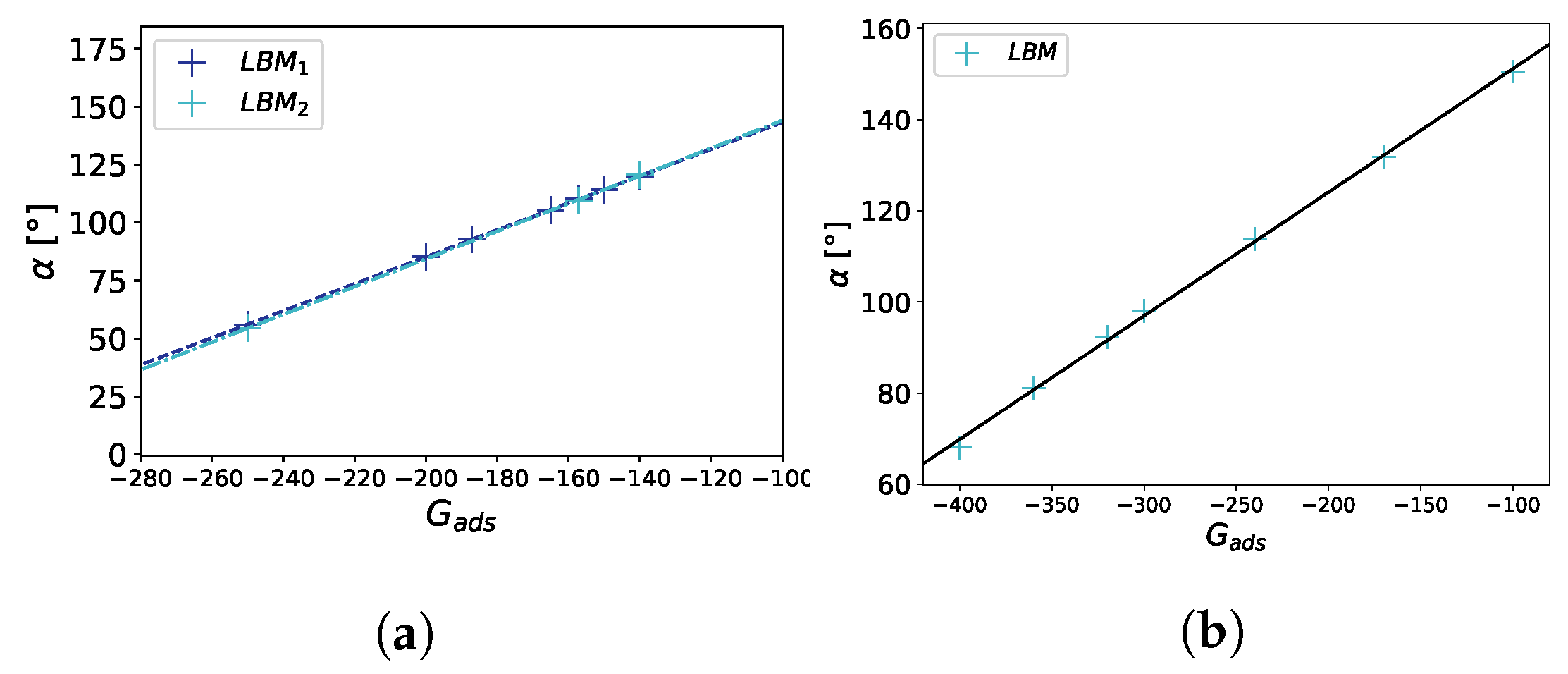
3.2. Wettability—Contact Angle Benchmark
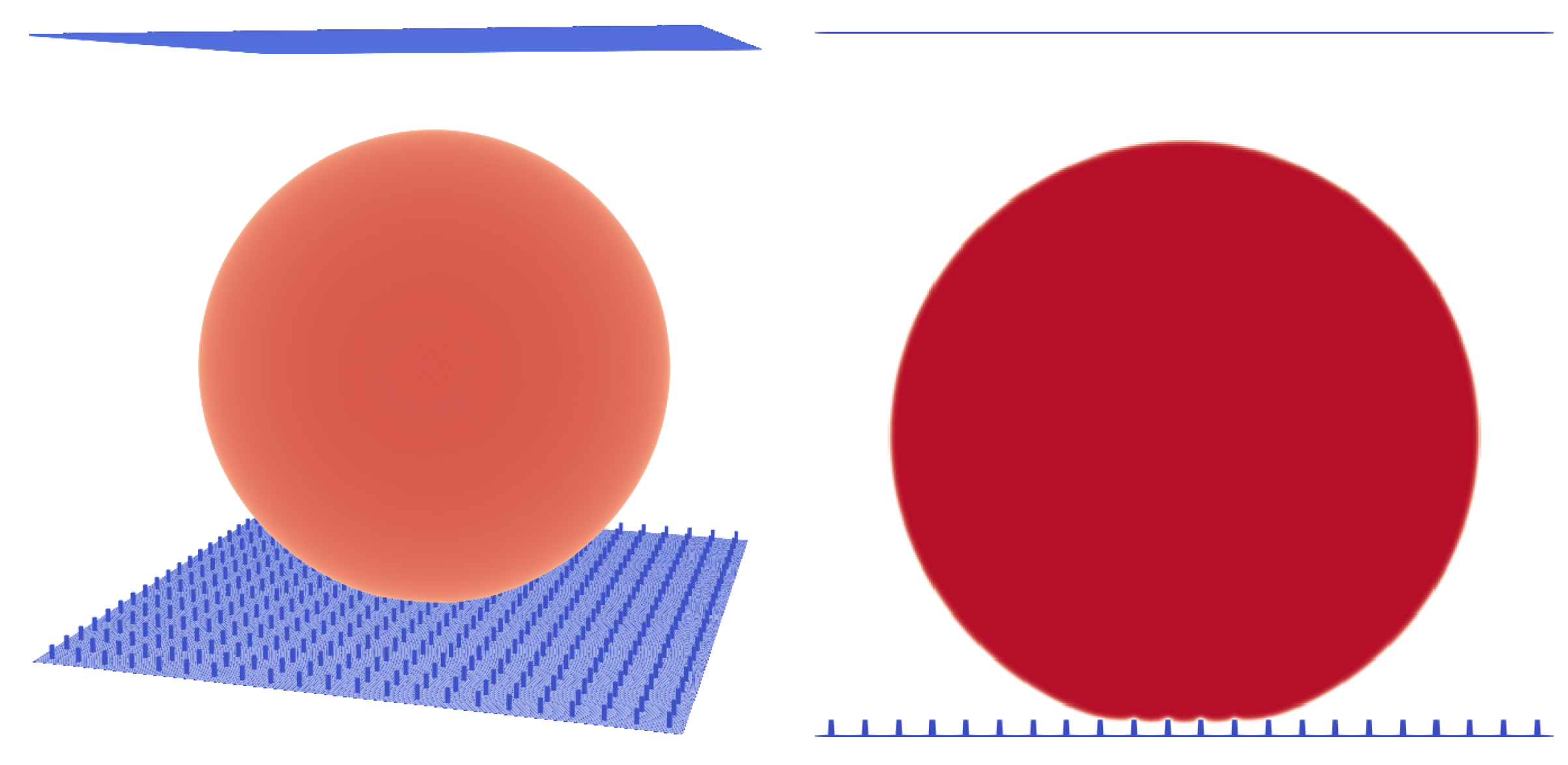
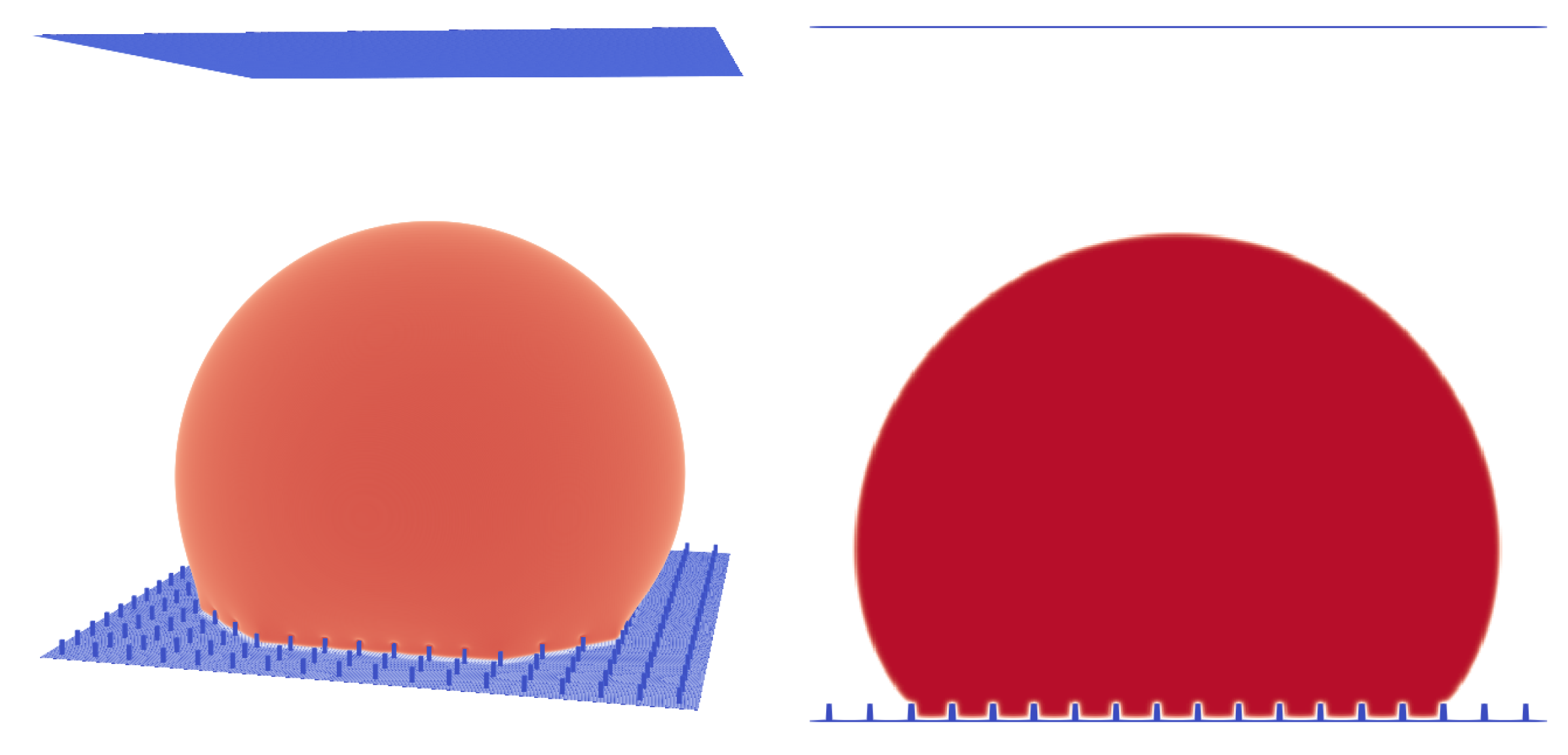
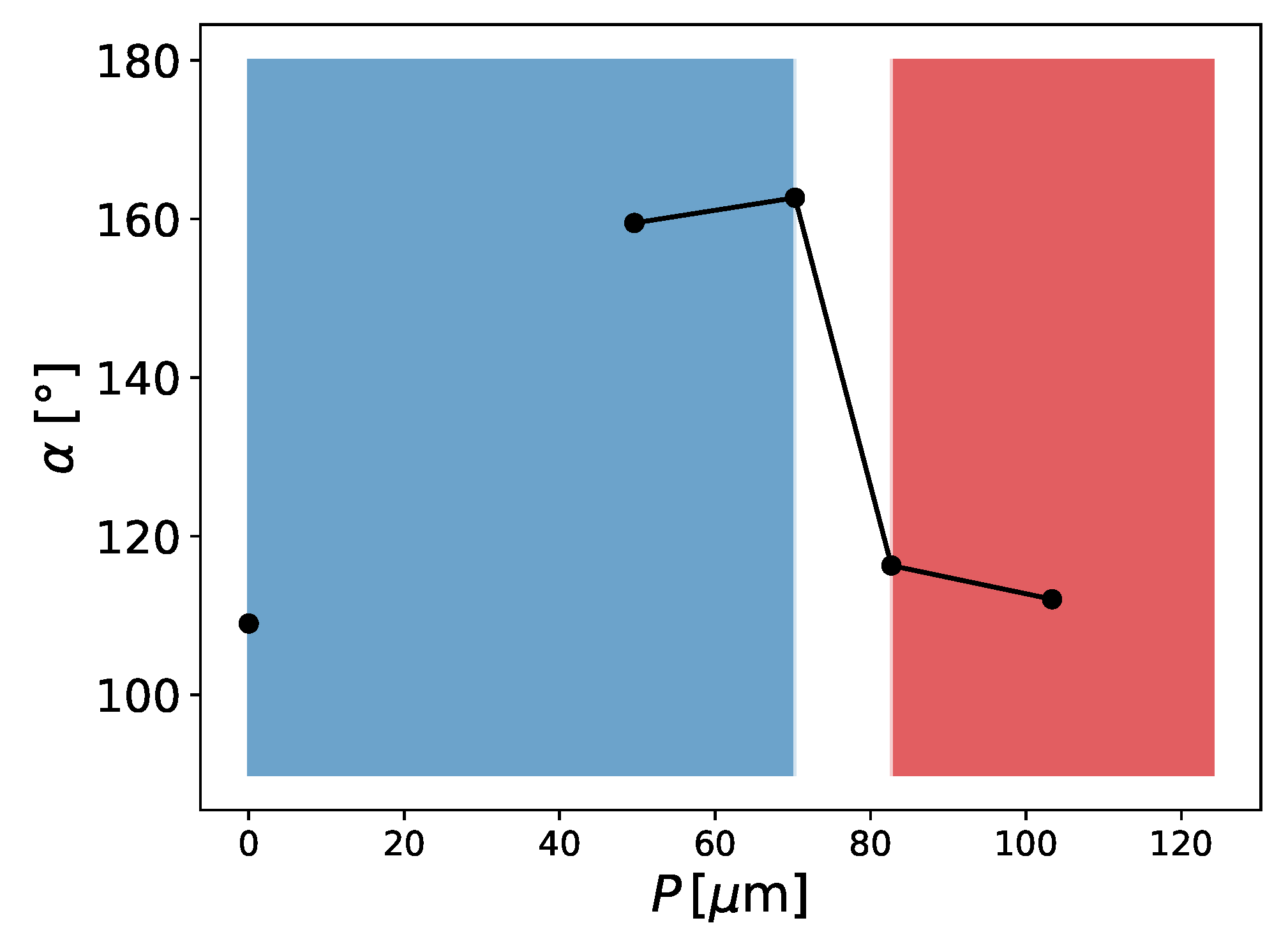
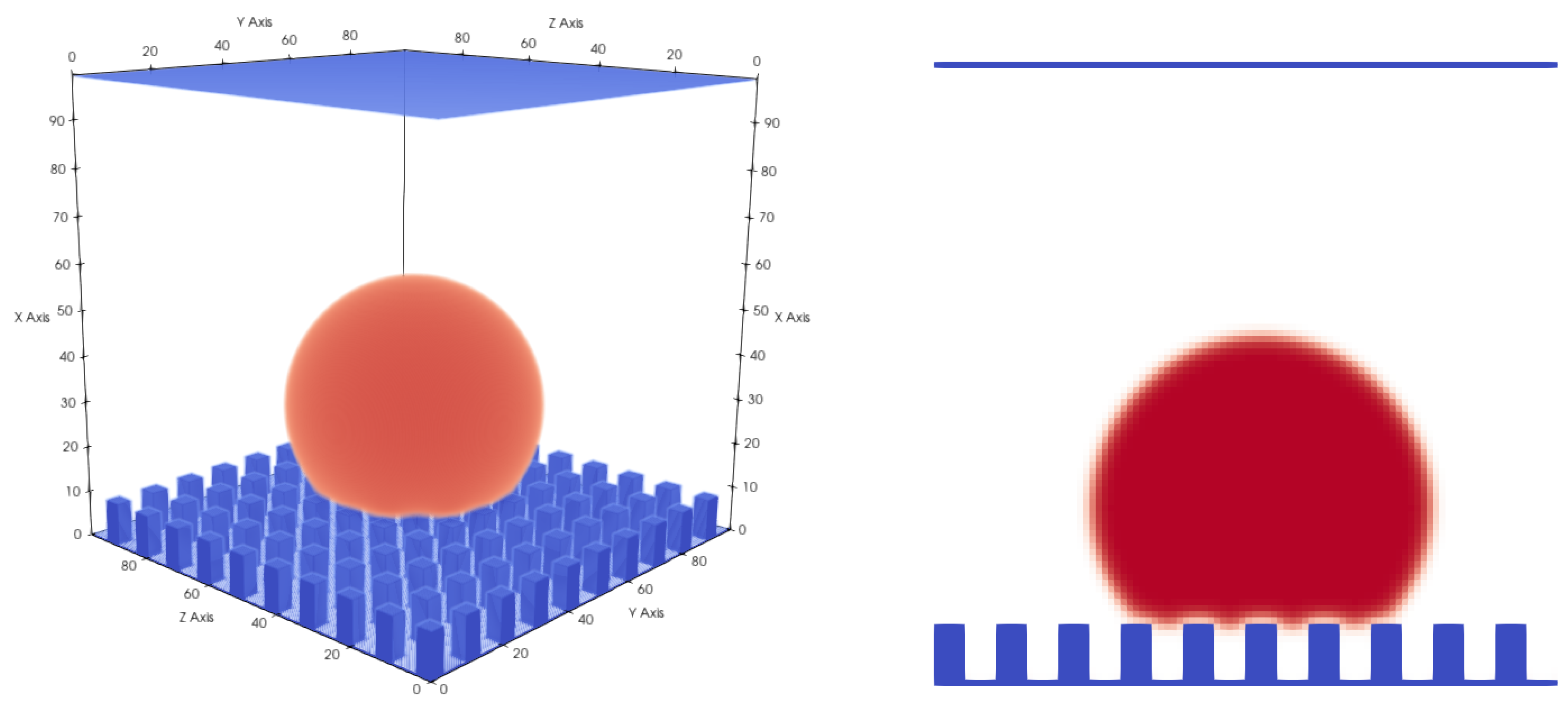
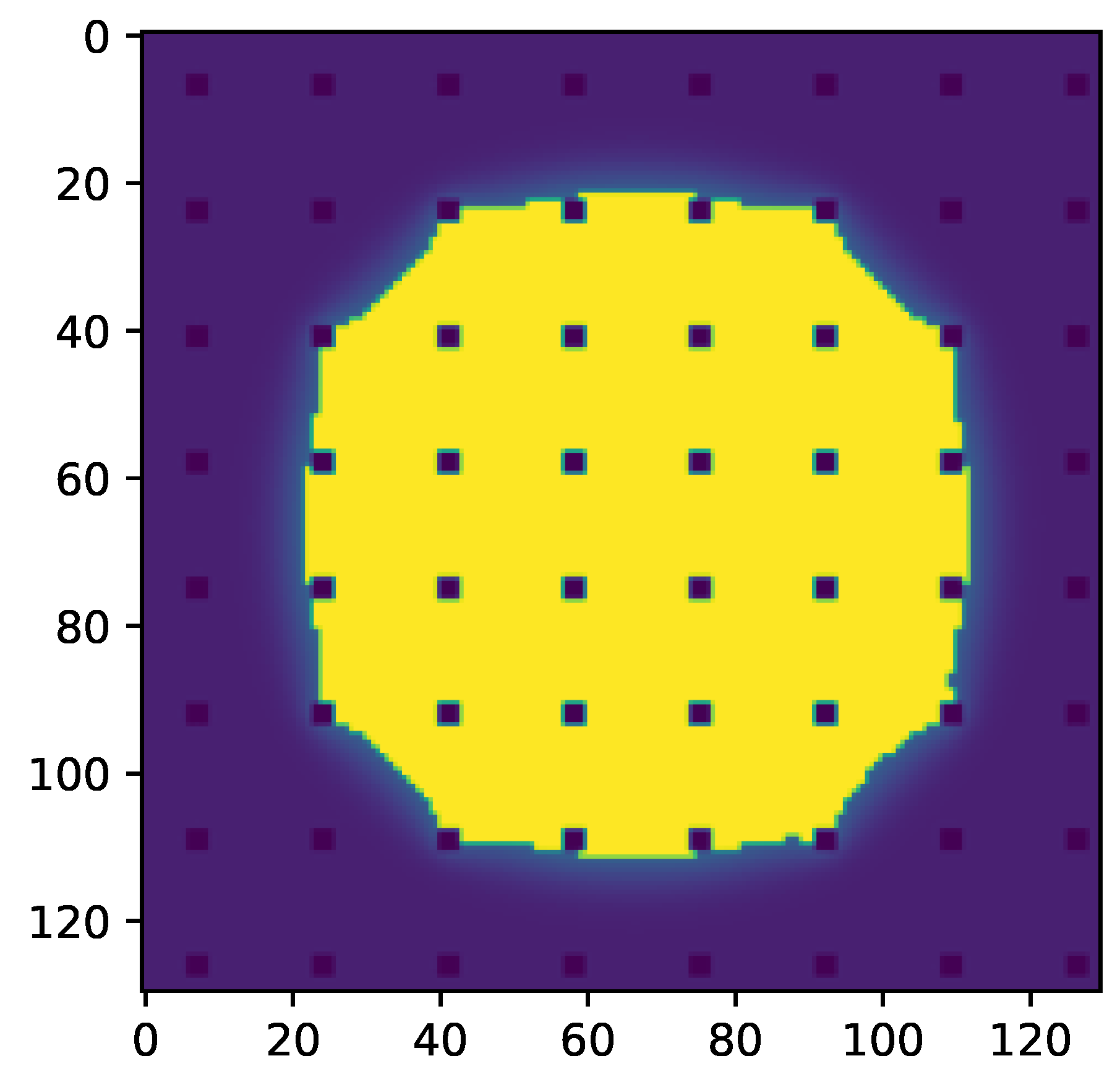
3.3. Cassie–Baxter and Wenzel States
3.4. Liquid Entry Pressure
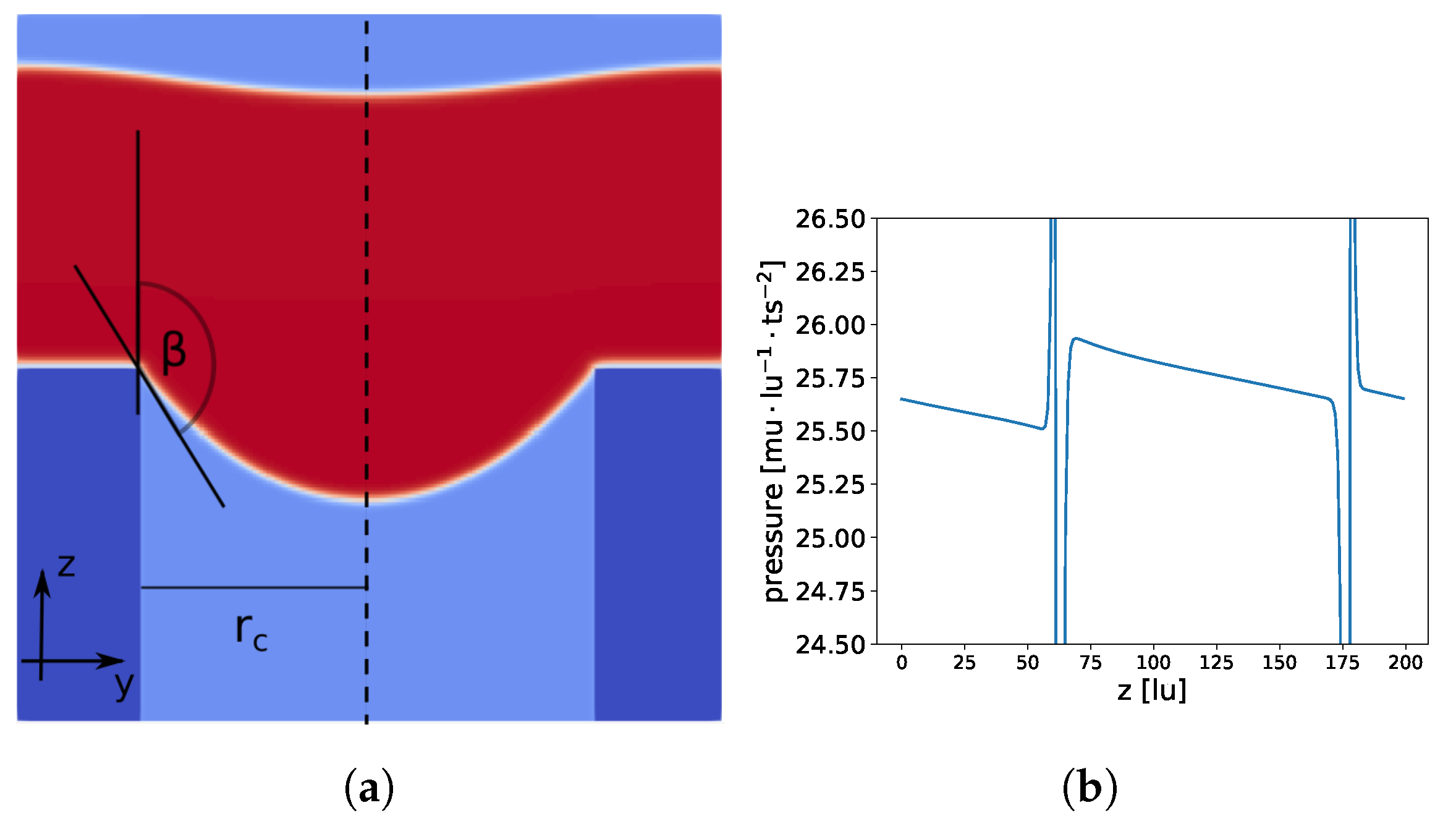
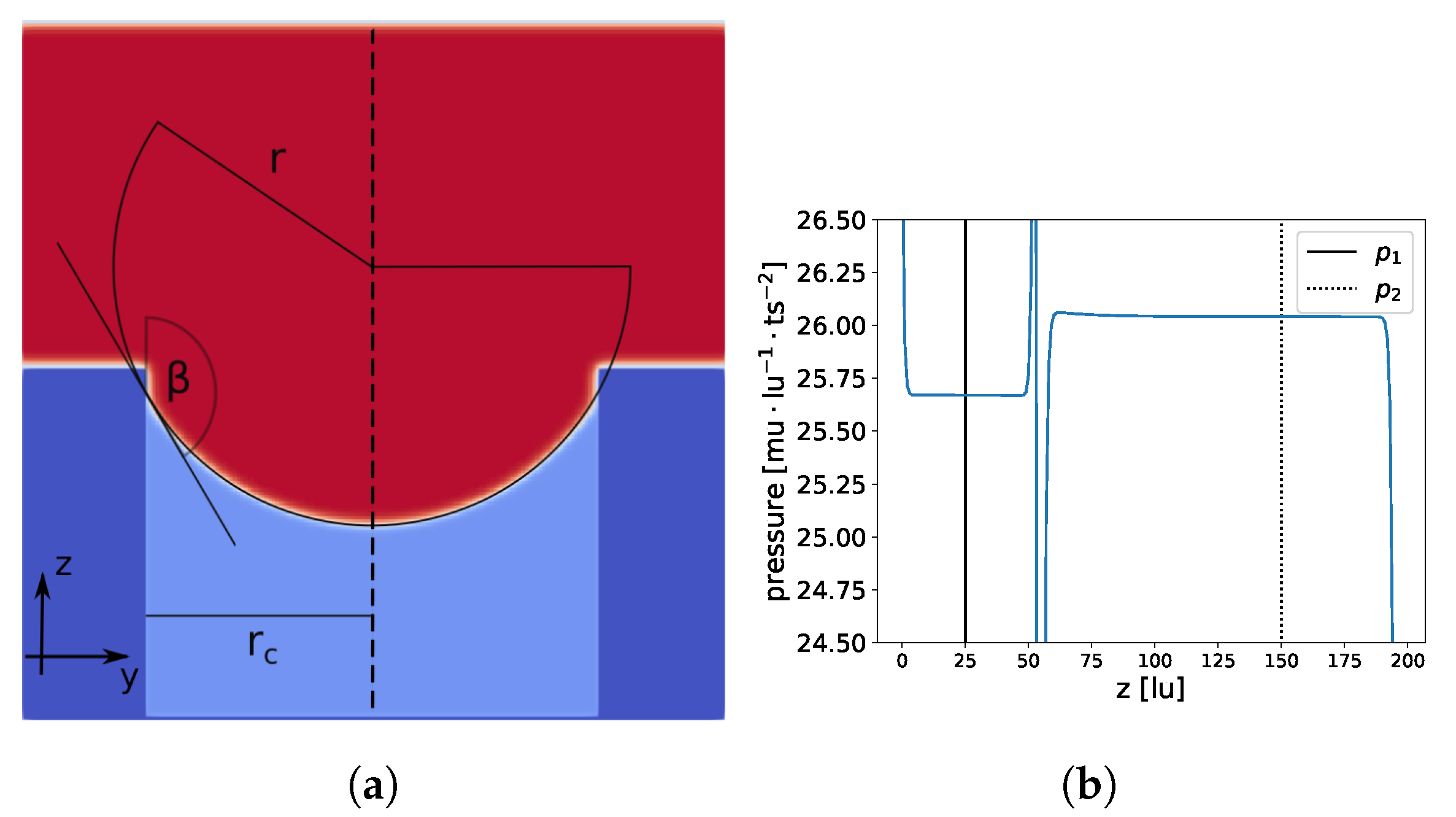
3.4.1. Cylindrical Pore
3.4.2. Realistic Distillation Membrane
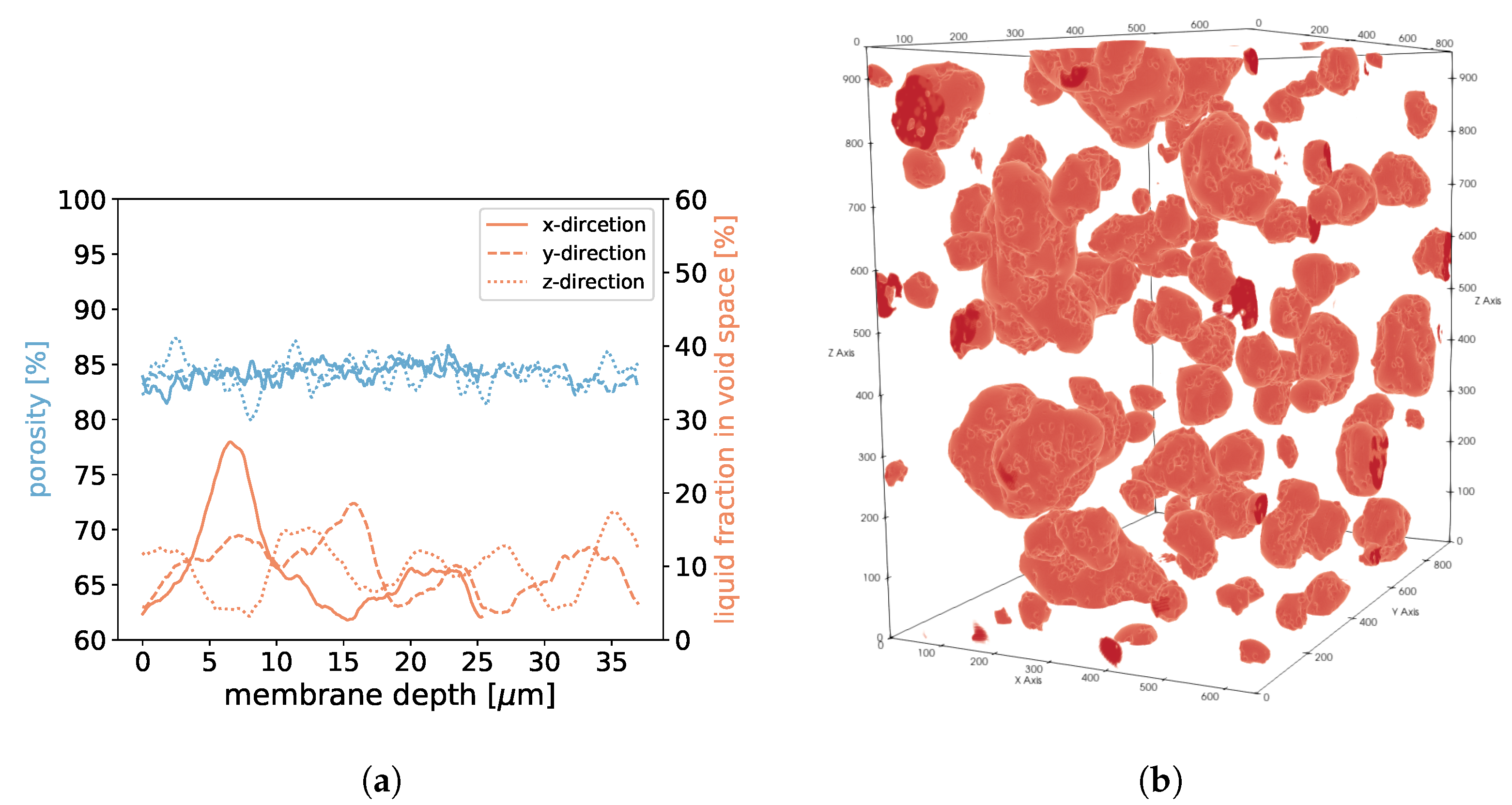
3.5. Liquid–Vapour Interface within a Realistic Distillation Membrane
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Programme, U.W.W.A. The United Nations World Water Development Report 2020: Water and Climate Change; UNESCO: 2010. Available online: https://digitallibrary.un.org/record/3892703?ln=en (accessed on 1 September 2022).
- Feria-Díaz, J.J.; López-Méndez, M.C.; Rodríguez-Miranda, J.P.; Sandoval-Herazo, L.C.; Correa-Mahecha, F. Commercial Thermal Technologies for Desalination of Water from Renewable Energies: A State of the Art Review. Processes 2021, 9, 262. [Google Scholar] [CrossRef]
- Ng, K.C.; Burhan, M.; Chen, Q.; Ybyraiymkul, D.; Akhtar, F.H.; Kumja, M.; Field, R.W.; Shahzad, M.W. A thermodynamic platform for evaluating the energy efficiency of combined power generation and desalination plants. NPJ Clean Water 2021, 4, 25. [Google Scholar] [CrossRef]
- Alkhudhiri, A.; Darwish, N.; Hilal, N. Membrane distillation: A comprehensive review. Desalination 2012, 287, 2–18. [Google Scholar] [CrossRef]
- Chen, Q.; Burhan, M.; Akhtar, F.H.; Ybyraiymkul, D.; Shahzad, M.W.; Li, Y.; Ng, K.C. A decentralized water/electricity cogeneration system integrating concentrated photovoltaic/thermal collectors and vacuum multi-effect membrane distillation. Energy 2021, 230, 120852. [Google Scholar] [CrossRef]
- Al-Karaghouli, A.; Kazmerski, L.L. Energy consumption and water production cost of conventional and renewable-energy-powered desalination processes. Renew. Sustain. Energy Rev. 2013, 24, 343–356. [Google Scholar] [CrossRef]
- Saffarini, R.B.; Summers, E.K.; Arafat, H.A.; Lienhard V, J.H. Economic evaluation of stand-alone solar powered membrane distillation systems. Desalination 2012, 299, 55–62. [Google Scholar] [CrossRef]
- Souhaimi, M.K. Membrane Distillation: Principles and Applications; Elsevier: Oxford, UK, 2011. [Google Scholar]
- Xiao, Z.; Zheng, R.; Liu, Y.; He, H.; Yuan, X.; Ji, Y.; Li, D.; Yin, H.; Zhang, Y.; Li, X.M.; et al. Slippery for scaling resistance in membrane distillation: A novel porous micropillared superhydrophobic surface. Water Res. 2019, 155, 152–161. [Google Scholar] [CrossRef]
- Jung, Y.; Bhushan, B. Wetting behaviour during evaporation and condensation of water microdroplets on superhydrophobic patterned surfaces. J. Microsc. 2008, 229, 127–140. [Google Scholar] [CrossRef]
- Luo, K.; Xia, J.; Monaco, E. Multiscale modelling of multiphase flow with complex interactions. J. Multiscale Model. 2009, 1, 125–156. [Google Scholar] [CrossRef]
- Cramer, K.; Prasianakis, N.I.; Niceno, B.; Ihli, J.; Leyer, S. Three-Dimensional Membrane Imaging with X-ray Ptychography: Determination of Membrane Transport Properties for Membrane Distillation. Transp. Porous Media 2021, 138, 265–284. [Google Scholar] [CrossRef]
- Persad, A.H. Statistical Rate Theory Expression for Energy Transported during Evaporation. Ph.D. Thesis, Mechanical and Industrial Engineering University of Toronto, Toronto, ON, Canada, 2014. [Google Scholar]
- Persad, A.H.; Ward, C.A. Expressions for the Evaporation and Condensation Coefficients in the Hertz-Knudsen Relation. Chem. Rev. 2016, 116, 7727–7767. [Google Scholar] [CrossRef] [PubMed]
- Prasianakis, N.I.; Rosén, T.; Kang, J.; Eller, J.; Mantzaras, J.; Büichi, F.N. Simulation of 3D Porous Media Flows with Application to Polymer Electrolyte Fuel Cells. Commun. Comput. Phys. 2013, 13, 851–866. [Google Scholar] [CrossRef][Green Version]
- Rosen, T.; Eller, J.; Kang, J.; Prasianakis, N.I.; Mantzaras, J.; Büchi, F.N. Saturation dependent effective transport properties of PEFC gas diffusion layers. J. Electrochem. Soc. 2012, 159, F536. [Google Scholar] [CrossRef]
- Khayet, M.; Godino, P.; Mengual, J. Modelling Transport Mechanism Through A Porous Partition. J.-Non-Equilib. Thermodyn. 2001, 26, 1–14. [Google Scholar] [CrossRef]
- Gong, W.; Zu, Y.; Chen, S.; Yan, Y. Wetting transition energy curves for a droplet on a square-post patterned surface. Sci. Bull. 2017, 62, 136–142. [Google Scholar] [CrossRef]
- Cassie, A.B.D.; Baxter, S. Wettability of porous surfaces. Trans. Faraday Soc. 1944, 40, 546–551. [Google Scholar] [CrossRef]
- Prasianakis, N.I.; Karlin, I.V.; Mantzaras, J.; Boulouchos, K.B. Lattice Boltzmann method with restored Galilean invariance. Phys. Rev. E 2009, 79, 066702. [Google Scholar] [CrossRef]
- Qian, Y.H.; D’Humières, D.; Lallemand, P. Lattice BGK Models for Navier-Stokes Equation. Europhys. Lett. (EPL) 1992, 17, 479–484. [Google Scholar] [CrossRef]
- Peng, C.; Tian, S.; Li, G.; Sukop, M.C. Single-component multiphase lattice Boltzmann simulation of free bubble and crevice heterogeneous cavitation nucleation. Phys. Rev. E 2018, 98, 023305. [Google Scholar] [CrossRef]
- Kunes, J. Dimensionless Physical Quantities in Science and Engineering. 2012. Available online: https://books.google.pl/books/about/Membrane_Distillation.html?id=5yzHdm8vOqMC&redir_esc=y (accessed on 1 September 2022).
- Safi, M.A.; Mantzaras, J.; Prasianakis, N.I.; Lamibrac, A.; Büchi, F.N. A pore-level direct numerical investigation of water evaporation characteristics under air and hydrogen in the gas diffusion layers of polymer electrolyte fuel cells. Int. J. Heat Mass Transf. 2019, 129, 1250–1262. [Google Scholar] [CrossRef]
- Shan, X.; Chen, H. Lattice Boltzmann model for simulating flows with multiple phases and components. Phys. Rev. E 1993, 47, 1815–1819. [Google Scholar] [CrossRef] [PubMed]
- Shan, X.; Chen, H. Simulation of nonideal gases and liquid-gas phase transitions by the lattice Boltzmann equation. Phys. Rev. E 1994, 49, 2941. [Google Scholar] [CrossRef] [PubMed]
- Sukop, M.C.; Thorne, D.T., Jr. Lattice Boltzmann Modeling; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Zou, Q.; He, X. On pressure and velocity boundary conditions for the lattice Boltzmann BGK model. Phys. Fluids 1997, 9, 1591–1598. [Google Scholar] [CrossRef]
- Zong, Y.; Li, M.; Wang, K. Outflow boundary condition of multiphase microfluidic flow based on phase ratio equation in lattice Boltzmann method. Phys. Fluids 2021, 33, 073304. [Google Scholar] [CrossRef]
- Safi, M.A.; Prasianakis, N.I.; Mantzaras, J.; Lamibrac, A.; Büchi, F.N. Experimental and pore-level numerical investigation of water evaporation in gas diffusion layers of polymer electrolyte fuel cells. Int. J. Heat Mass Transf. 2017, 115, 238–249. [Google Scholar] [CrossRef]
- Wenzel, R.N. Resistance of Solid Surfaces to Wetting by Water. Ind. Eng. Chem. 1936, 28, 988–994. [Google Scholar] [CrossRef]
- Xiong, W.; Cheng, P. Mesoscale simulation of a molten droplet impacting and solidifying on a cold rough substrate. Int. Commun. Heat Mass Transf. 2018, 98, 248–257. [Google Scholar] [CrossRef]
- Racz, G.; Kerker, S.; Kovács, Z.; Vatai, G.; Ebrahimi, M.; Czermak, P. Theoretical and Experimental Approaches of Liquid Entry Pressure Determination in Membrane Distillation Processes. Period. Polytech. Chem. Eng. 2014, 58, 81–91. [Google Scholar] [CrossRef]
- Lubarda, V.; Talke, K. Analysis of the Equilibrium Droplet Shape Based on an Ellipsoidal Droplet Model. Langmuir ACS J. Surf. Colloids 2011, 27, 10705–10713. [Google Scholar] [CrossRef]
- 2021. Available online: https://www.accudynetest.com/polymer_surface_data/ptfe.pdf (accessed on 1 January 2020).
- Rezaei, M.; Warsinger, D.M.; Lienhard V, J.H.; Duke, M.C.; Matsuura, T.; Samhaber, W.M. Wetting phenomena in membrane distillation: Mechanisms, reversal, and prevention. Water Res. 2018, 139, 329–352. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching Cubes: A High Resolution 3D Surface Construction Algorithm. SIGGRAPH Comput. Graph. 1987, 21, 163–169. [Google Scholar] [CrossRef]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T.; the scikit-image contributors. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Pot, V.; Peth, S.; Monga, O.; Vogel, L.; Genty, A.; Garnier, P.; Vieublé-Gonod, L.; Ogurreck, M.; Beckmann, F.; Baveye, P. Three-dimensional distribution of water and air in soil pores: Comparison of two-phase two-relaxation-times lattice-Boltzmann and morphological model outputs with synchrotron X-ray computed tomography data. Adv. Water Resour. 2015, 84, 87–102. [Google Scholar] [CrossRef]
- Varrette, S.; Cartiaux, H.; Peter, S.; Kieffer, E.; Valette, T.; Olloh, A. Management of an Academic HPC & Research Computing Facility: The ULHPC Experience 2.0. In Proceedings of the 6th ACM High Performance Computing and Cluster Technologies Conf. (HPCCT 2022), Fuzhou, China, 8–10 July 2022; Association for Computing Machinery (ACM), 2022. Available online: https://dl.acm.org/doi/abs/10.1145/3560442.3560445 (accessed on 1 September 2022).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | Membrane | Manufacturer | Pore Diameter | Sample Dimensions () | |
|---|---|---|---|---|---|
| [] | [] | [Voxels] | |||
| 1 | FGLP14250 | Merck Millipore | 0.2 | 59.85 | |
| 2 | Gore | Gore | 0.22 | ||
| 3 | FHLP14250 | Merck Millipore | 0.45 | ||
| 4 | FGLP14250 | Merck Millipore | 0.2 | ||
| LB Units | SI Units | Remark | |
|---|---|---|---|
| 1028 | 998.861 | pure water, 1 bar, 16.5 C | |
| 53 | 1.204 | 1 bar, 16.5 C | |
| 975 | 997.657 | ||
| 19.4 | 829.619 | ||
| 171.33 | Pa·s | 1 bar, 16.5 C | |
| 8.83 | Pa·s | 1 bar, 16.5 C | |
| 19 | 60 | ||
| 1 | m | ||
| 1 | s | ||
| c | 1 | 168.5 m/s | |
| La | 24,424 | 24,424 | 1 bar, 16.5 C |
| 68 | 0.073 N/m | pure water, 1 bar, 16.5 C | |
| Bo |
| State | Size [voxel] | [voxel] | P | H | [] Flat LBM | [] Rough LBM | [] | [] | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CB | 100 × 100 × 100 | 10 | 10 | - | |||||||
| () | () | ||||||||||
| CB | 100 × 100 × 100 | 10 | 10 | - | |||||||
| () | () | ||||||||||
| CB | 100 × 100 × 100 | 10 | 10 | - | |||||||
| () | () | ||||||||||
| CB | 121 × 175 × 175 | 20 | 15 | - | - | - | |||||
| () | |||||||||||
| CB | 320 × 380 × 380 | 20 | 15 | 109 | - | ||||||
| () | () | ||||||||||
| CB | 342 × 384 × 384 | 12 | 8 | 109 | - | ||||||
| () | () | ||||||||||
| CB | 357 × 374 × 374 | 17 | 8 | 109 | - | ||||||
| () | () | ||||||||||
| Wenzel | 340 × 360 × 360 | 20 | 8 | 109 | - | - | - | ||||
| () | |||||||||||
| Wenzel | 357 × 374 × 374 | 25 | 8 | 109 | - | - | - | ||||
| () |
| Sample | Membrane Dimensions () | Liquid Entry Depth in x | LEP Experiments [33] | ||
|---|---|---|---|---|---|
| [] | [voxels] | [bar] | [] | [bar] | |
| 1 | 3.112 | > (breakthrough) | 2.8 | ||
| 2.510 | > (breakthrough) | (from manufacturer) | |||
| 1.912 | |||||
| 0.732 | |||||
| 0.182 | |||||
| 2 | 2.510 | > (breakthrough) | |||
| 1.912 | |||||
| 2.21 | |||||
| 1.912 | |||||
| 1.320 | |||||
| 0.182 | |||||
| 3 | 1.912 | > (breakthrough) | |||
| 1.320 | |||||
| 0.182 | |||||
| 4 | 1.912 | > (breakthrough) | 2.8 | ||
| 1.320 | > (breakthrough) | (from manufacturer) | |||
| 1.025 | |||||
| 0.182 | |||||
| Sample | v [cm/s] | Pillars | [%] | [%] | [%] |
|---|---|---|---|---|---|
| 1 | 0.0 | no | 51.96 | 64.48 | 124.10 |
| 2 | 0.0 | no | 51.3 | 63.99 | 124.74 |
| 3 | 0.0 | no | 62.4 | 76.96 | 123.33 |
| 3 | 1.7 | no | 62.4 | 76.96 | 123.33 |
| 3 | 0.0 | yes | 44.24 | 71.73 | 162.14 |
| 3 | 1.7 | yes | 44.25 | 71.74 | 162.12 |
| 4 | 0.0 | no | 64.08 | 81.88 | 127.78 |
| Sample | Domain Dimensions | [%] | [%] | [%] | [%] | [%] | [%] |
|---|---|---|---|---|---|---|---|
| 1 | 1535 × 575 × 575 | 7.61 | 69.25 | 23.14 | 48.72 | 328.84 | 674.96 |
| 2 | 1660 × 400 × 400 | 7.57 | 68.8 | 23.63 | 57.66 | 222.17 | 385.31 |
| 3 | 1601 × 550 × 550 | 8.42 | 76.62 | 14.96 | 60.53 | 239.15 | 395.09 |
| 4 | 650 × 950 × 950 | 8.33 | 75.9 | 15.77 | 53.29 | 350.47 | 657.66 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jäger, T.; Mokos, A.; Prasianakis, N.I.; Leyer, S. Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination. Membranes 2022, 12, 1112. https://doi.org/10.3390/membranes12111112
Jäger T, Mokos A, Prasianakis NI, Leyer S. Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination. Membranes. 2022; 12(11):1112. https://doi.org/10.3390/membranes12111112
Chicago/Turabian StyleJäger, Tobias, Athanasios Mokos, Nikolaos I. Prasianakis, and Stephan Leyer. 2022. "Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination" Membranes 12, no. 11: 1112. https://doi.org/10.3390/membranes12111112
APA StyleJäger, T., Mokos, A., Prasianakis, N. I., & Leyer, S. (2022). Pore-Level Multiphase Simulations of Realistic Distillation Membranes for Water Desalination. Membranes, 12(11), 1112. https://doi.org/10.3390/membranes12111112