
Brain Activity-Based Metrics for Assessing Learning States in VR under Stress among Firefighters: An Explorative Machine Learning Approach in Neuroergonomics



Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
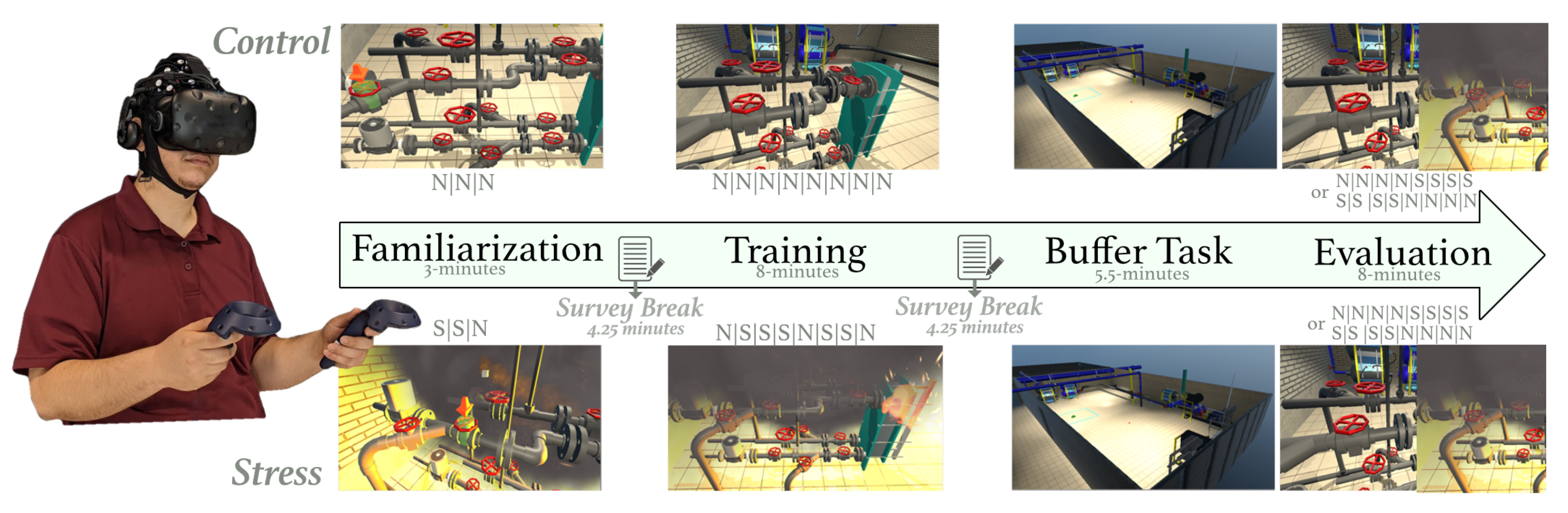
2.2. Protocol
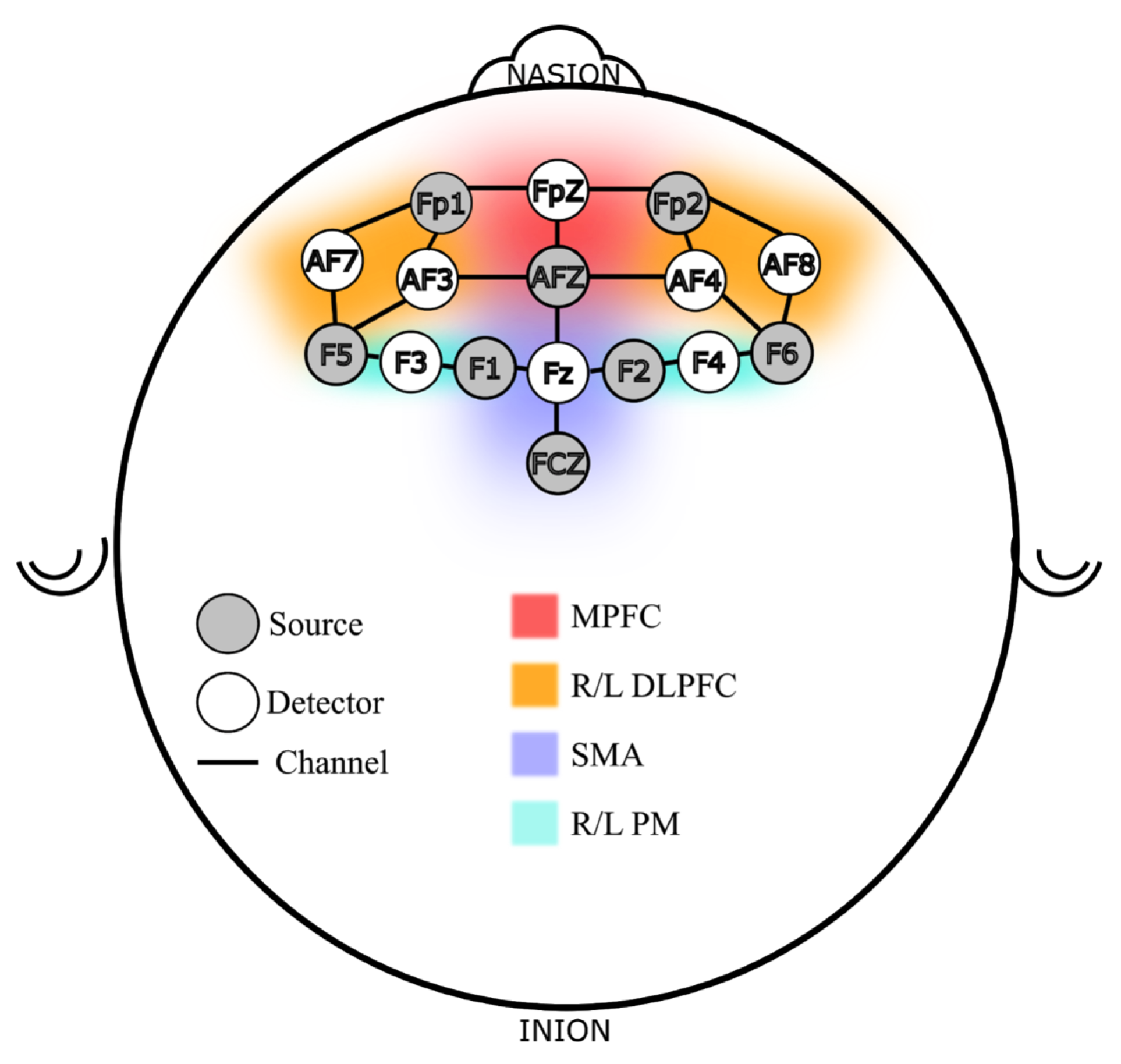
2.3. Bioinstrumentation
2.4. Pre-Processing Brain Hemodynamics
2.5. Feature Extraction
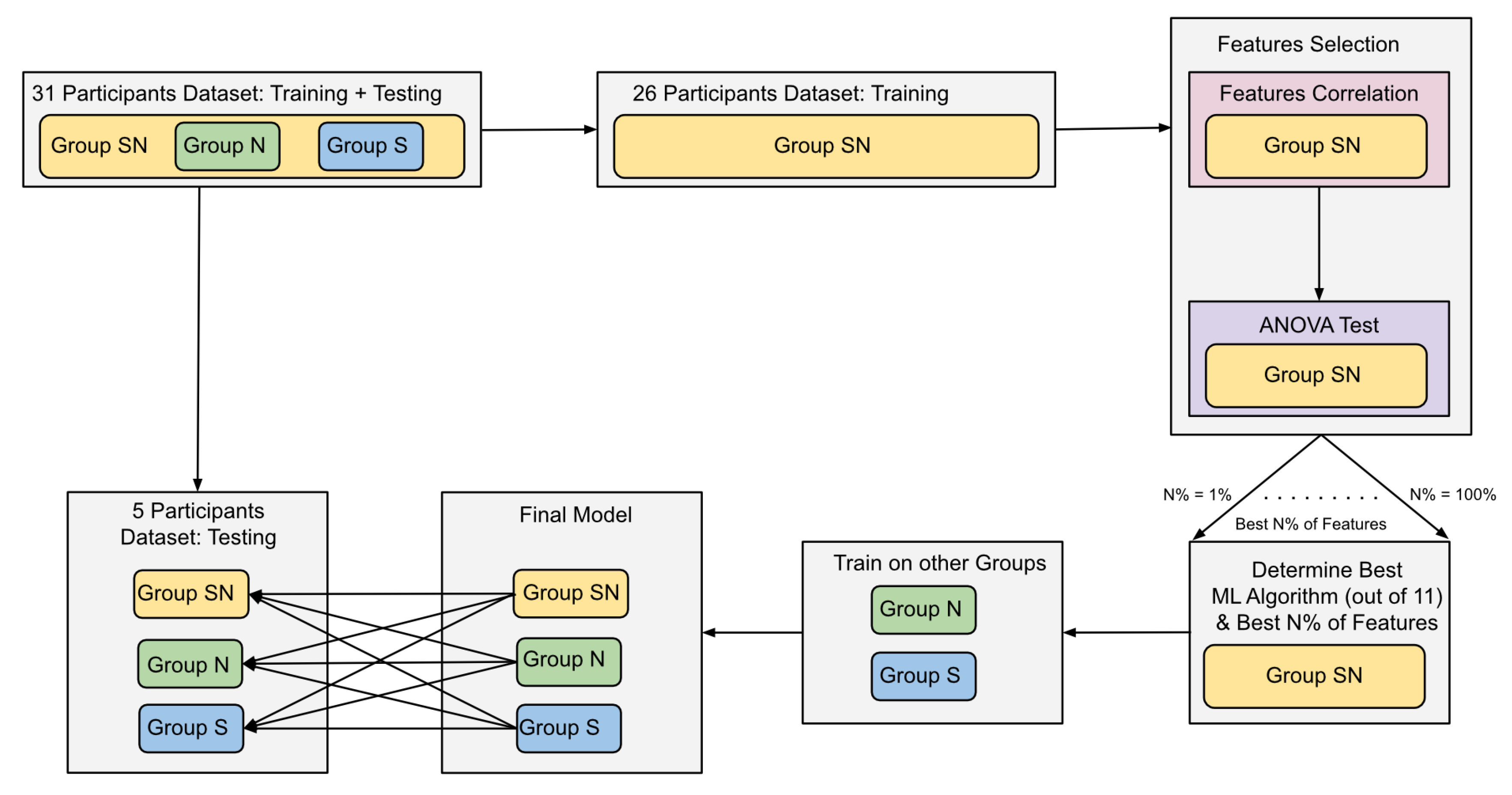
2.6. Machine Learning Workflow
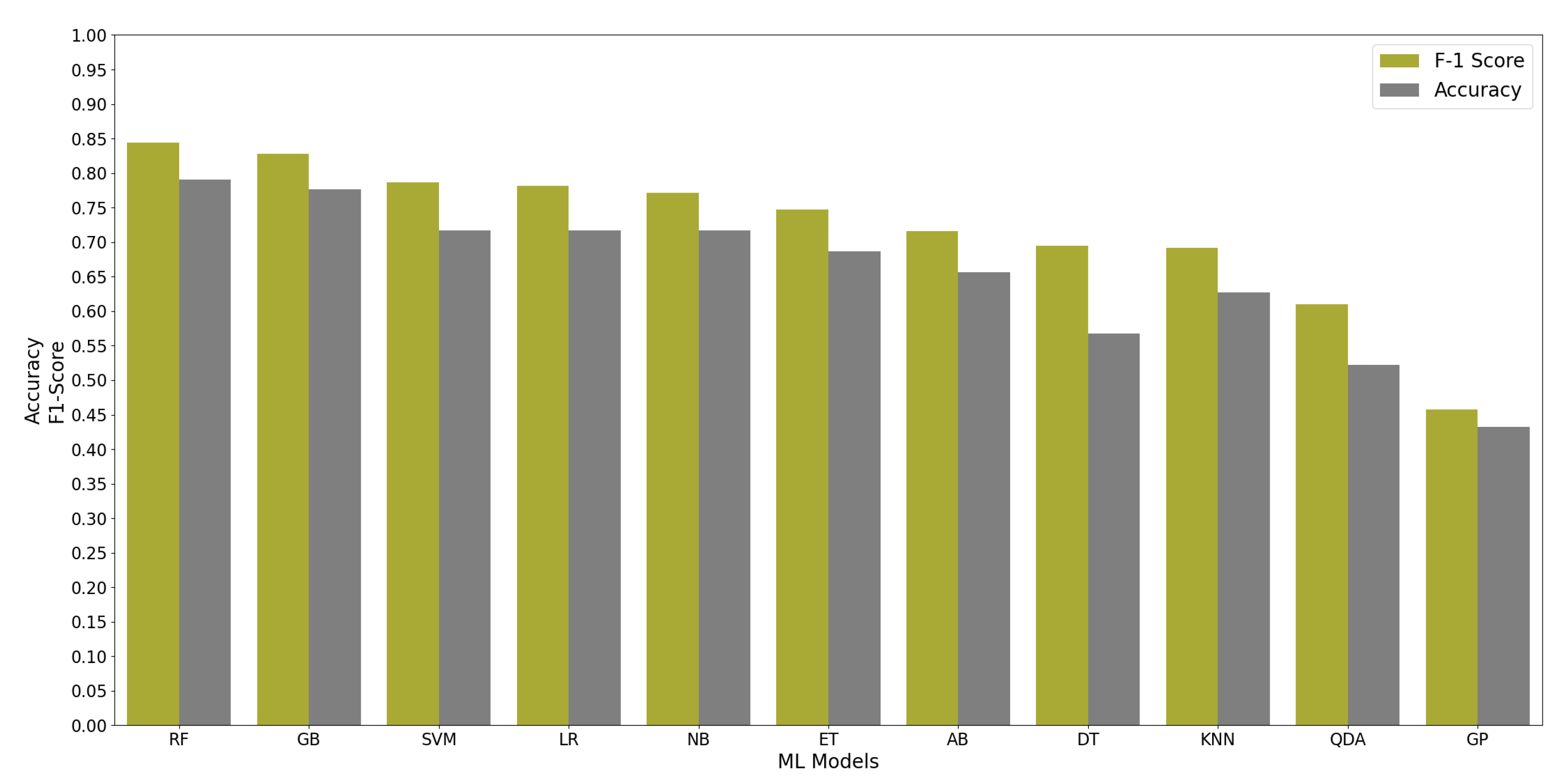
3. Results
4. Discussion
4.1. General Discussion
4.2. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Burbeck, R.; Coomber, S.; Robinson, S.; Todd, C. Occupational stress in consultants in accident and emergency medicine: A national survey of levels of stress at work. Emerg. Med. J. 2002, 19, 234–238. [Google Scholar] [CrossRef] [Green Version]
- Beaton, R.D.; Murphy, S.A. Sources of occupational stress among firefighter/EMTs and firefighter/paramedics and correlations with job-related outcomes. Prehospital Disaster Med. 1993, 8, 140–150. [Google Scholar] [CrossRef]
- Rajabi, F.; Molaeifar, H.; Jahangiri, M.; Taheri, S.; Banaee, S.; Farhadi, P. Occupational stressors among firefighters: Application of multi-criteria decision making (MCDM) Techniques. Heliyon 2020, 6, e03820. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Wu, X.; Xu, Z.; Fujita, H. Emergency decision making for natural disasters: An overview. Int. J. Disaster Risk Reduct. 2018, 27, 567–576. [Google Scholar] [CrossRef]
- Krasuski, A.; Jankowski, A.; Skowron, A.; Slezak, D. From sensory data to decision making: A perspective on supporting a fire commander. In Proceedings of the 2013 IEEE/WIC/ACM International Joint Conferences on Web Intelligence (WI) and Intelligent Agent Technologies (IAT), Atlanta, GA, USA, 17–20 November 2013; Volume 3, pp. 229–236. [Google Scholar]
- St. Julien, T.U.; Shaw, C.D. Firefighter command training virtual environment. In Proceedings of the 2003 Conference on Diversity in Computing, Atlanta, GA, USA, 15–18 October 2003; pp. 30–33. [Google Scholar]
- Engelbrecht, H.; Lindeman, R.W.; Hoermann, S. A SWOT analysis of the field of virtual reality for firefighter training. Front. Robot. AI 2019, 6, 101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, D.; Bhagat, K.K.; Gao, Y.; Chang, T.W.; Huang, R. The potentials and trends of virtual reality in education. In Virtual, Augmented, and Mixed Realities in Education; Springer: Singapore, 2017; pp. 105–130. [Google Scholar]
- Spilski, J.; Exner, J.P.; Schmidt, M.; Makhkamova, A.; Schlittmeier, S.; Giehl, C.; Lachmann, T.; Pietschmann, M.; Werth, D. Potential of VR in the vocational education and training of craftsmen. In Proceedings of the 19th International Conference on Construction Applications of Virtual Reality, Bangkok, Thailand, 13–15 November 2019. [Google Scholar]
- Corriveau Lecavalier, N.; Ouellet, É.; Boller, B.; Belleville, S. Use of immersive virtual reality to assess episodic memory: A validation study in older adults. Neuropsychol. Rehabil. 2020, 30, 462–480. [Google Scholar] [CrossRef]
- Lin, J.; Zhu, R.; Li, N.; Becerik-Gerber, B. Do people follow the crowd in building emergency evacuation? A cross-cultural immersive virtual reality-based study. Adv. Eng. Inform. 2020, 43, 101040. [Google Scholar] [CrossRef]
- McGrath, J.L.; Taekman, J.M.; Dev, P.; Danforth, D.R.; Mohan, D.; Kman, N.; Crichlow, A.; Bond, W.F.; Riker, S.; Lemheney, A.; et al. Using virtual reality simulation environments to assess competence for emergency medicine learners. Acad. Emerg. Med. 2018, 25, 186–195. [Google Scholar] [CrossRef] [PubMed]
- Mehta, R.; Moats, J.; Karthikeyan, R.; Gabbard, J.; Srinivasan, D.; Du, J.; Leonessa, A.; Burks, G.; Fernandes, R.; Stephenson, D. Human-Centered Intelligent Trainings for Emergency Responders. AI Mag. 2021. in review. [Google Scholar]
- Gramann, K.; McKendrick, R.; Baldwin, C.; Roy, R.N.; Jeunet, C.; Mehta, R.K.; Vecchiato, G. Grand Field Challenges for Cognitive Neuroergonomics in the Coming Decade. Front. Neuroergonom. 2021, 2, 6. [Google Scholar] [CrossRef]
- Dey, A.; Chatburn, A.; Billinghurst, M. Exploration of an EEG-based cognitively adaptive training system in virtual reality. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 220–226. [Google Scholar]
- Vogel, S.; Schwabe, L. Learning and memory under stress: Implications for the classroom. NPJ Sci. Learn. 2016, 1, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Joëls, M.; Pu, Z.; Wiegert, O.; Oitzl, M.S.; Krugers, H.J. Learning under stress: How does it work? Trends Cogn. Sci. 2006, 10, 152–158. [Google Scholar] [CrossRef] [PubMed]
- Bauer, P.J.; Dikmen, S.S.; Heaton, R.K.; Mungas, D.; Slotkin, J.; Beaumont, J.L., III. NIH Toolbox Cognition Battery (CB): Measuring episodic memory. Monogr. Soc. Res. Child Dev. 2013, 78, 34–48. [Google Scholar] [CrossRef] [Green Version]
- Zola, S.M.; Squire, L.R. The medial temporal lobe and the hippocampus. In The Oxford Handbook of Memory; Oxford University Press: Oxford, UK, 2000; pp. 485–500. [Google Scholar]
- Eichenbaum, H.; Cohen, N.J. From Conditioning to Conscious Recollection: Memory Systems of the Brain; Number 35; Oxford University Press on Demand: Oxford, UK, 2004. [Google Scholar]
- Dickerson, B.C.; Eichenbaum, H. The episodic memory system: Neurocircuitry and disorders. Neuropsychopharmacology 2010, 35, 86–104. [Google Scholar] [CrossRef]
- Shallice, T.; Fletcher, P.; Frith, C.D.; Grasby, P.; Frackowiak, R.S.; Dolan, R.J. Brain regions associated with acquisition and retrieval of verbal episodic memory. Nature 1994, 368, 633–635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loprinzi, P.D.; Blough, J.; Crawford, L.; Ryu, S.; Zou, L.; Li, H. The temporal effects of acute exercise on episodic memory function: Systematic review with meta-analysis. Brain Sci. 2019, 9, 87. [Google Scholar] [CrossRef] [Green Version]
- Gagnon, S.A.; Wagner, A.D. Acute stress and episodic memory retrieval: Neurobiological mechanisms and behavioral consequences. Ann. N. Y. Acad. Sci. 2016, 1369, 55–75. [Google Scholar] [CrossRef] [PubMed]
- Gagnon, S.A.; Waskom, M.L.; Brown, T.I.; Wagner, A.D. Stress impairs episodic retrieval by disrupting hippocampal and cortical mechanisms of remembering. Cereb. Cortex 2019, 29, 2947–2964. [Google Scholar] [CrossRef] [PubMed]
- Johannesen, J.K.; Bi, J.; Jiang, R.; Kenney, J.G.; Chen, C.M.A. Machine learning identification of EEG features predicting working memory performance in schizophrenia and healthy adults. Neuropsychiatr. Electrophysiol. 2016, 2, 1–21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jahani, S.; Fantana, A.L.; Harper, D.; Ellison, J.M.; Boas, D.A.; Forester, B.P.; Yücel, M.A. fNIRS can robustly measure brain activity during memory encoding and retrieval in healthy subjects. Sci. Rep. 2017, 7, 1–14. [Google Scholar] [CrossRef]
- Basso Moro, S.; Cutini, S.; Ursini, M.L.; Ferrari, M.; Quaresima, V. Prefrontal cortex activation during story encoding/retrieval: A multi-channel functional near-infrared spectroscopy study. Front. Hum. Neurosci. 2013, 7, 925. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pluntke, U.; Gerke, S.; Sridhar, A.; Weiss, J.; Michel, B. Evaluation and classification of physical and psychological stress in firefighters using heart rate variability. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 2207–2212. [Google Scholar]
- Oskooei, A.; Chau, S.M.; Weiss, J.; Sridhar, A.; Martínez, M.R.; Michel, B. Destress: Deep learning for unsupervised identification of mental stress in firefighters from heart-rate variability (hrv) data. In Explainable AI in Healthcare and Medicine; Springer: Cham, Swizterland, 2021; pp. 93–105. [Google Scholar]
- Kupschick, S.; Pendzich, M.; Gardas, D.; Jürgensohn, T.; Wischniewski, S.; Adolph, L. Predicting Firefighters’ Exertion Based on Machine Learning Techniques; Federal Institute for Occupational Safety and Health: Dortmund, Germany, 2016. [Google Scholar]
- Gateau, T.; Durantin, G.; Lancelot, F.; Scannella, S.; Dehais, F. Real-time state estimation in a flight simulator using fNIRS. PLoS ONE 2015, 10, e0121279. [Google Scholar] [CrossRef]
- Papakostas, M.; Kanal, V.; Abujelala, M.; Tsiakas, K.; Makedon, F. Physical fatigue detection through EMG wearables and subjective user reports: A machine learning approach towards adaptive rehabilitation. In Proceedings of the 12th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Rhodes, Greece, 5 June–7 June 2019; pp. 475–481. [Google Scholar]
- Tsiakas, K.; Abujelala, M.; Makedon, F. Task engagement as personalization feedback for socially-assistive robots and cognitive training. Technologies 2018, 6, 49. [Google Scholar] [CrossRef] [Green Version]
- Abujelala, M.; Abellanoza, C.; Sharma, A.; Makedon, F. Brain-ee: Brain enjoyment evaluation using commercial eeg headband. In Proceedings of the 9th ACM International Conference on Pervasive Technologies Related to Assistive Environments, Corfu Island, Greece, 29 June–1 July 2016; pp. 1–5. [Google Scholar]
- Babu, A.R.; Rajavenkatanarayanan, A.; Brady, J.R.; Makedon, F. Multimodal approach for cognitive task performance prediction from body postures, facial expressions and EEG signal. In Proceedings of the Workshop on Modeling Cognitive Processes from Multimodal Data, Boulder, CO, USA, 16 October 2018; pp. 1–7. [Google Scholar]
- Benerradi, J.; A. Maior, H.; Marinescu, A.; Clos, J.; L. Wilson, M. Exploring machine learning approaches for classifying mental workload using fNIRS data from HCI tasks. In Proceedings of the Halfway to the Future Symposium 2019, Nottingham, UK, 19–20 November 2019; pp. 1–11. [Google Scholar]
- Oku, A.Y.A.; Sato, J.R. Predicting student performance using machine learning in fNIRS data. Front. Hum. Neurosci. 2021, 15, 622224. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Zhuang, C.; Wang, F.; Liu, Y.J.; Im, C.H.; Zhang, D. fNIRS evidence for recognizably different positive emotions. Front. Hum. Neurosci. 2019, 13, 120. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, D.; Izzetoglu, M.; Holtzer, R.; Jiao, X. Machine Learning-based Classification of Active Walking Tasks in Older Adults using fNIRS. arXiv 2021, arXiv:2102.03987. [Google Scholar]
- Lopez-Martinez, D.; Peng, K.; Lee, A.; Borsook, D.; Picard, R. Pain Detection with FNIRS-measured brain signals: A personalized machine learning approach using the wavelet transform and bayesian hierarchical modeling with dirichlet process priors. In Proceedings of the 2019 8th International Conference on Affective Computing and Intelligent Interaction Workshops and Demos (ACIIW), Cambridge, UK, 3–6 September 2019; pp. 304–309. [Google Scholar]
- Rojas, R.F.; Huang, X.; Ou, K.L. A machine learning approach for the identification of a biomarker of human pain using fNIRS. Sci. Rep. 2019, 9, 1–12. [Google Scholar]
- Tyagi, O.; Hopko, S.; Kang, J.; Shi, Y.; Mehta, R.; Du, J. Modeling Brain Dynamics during Virtual Reality-based Emergency Response Learning under Stress. 2021. in review. [Google Scholar]
- Shi, Y.; Zhu, Y.; Mehta, R.K.; Du, J. A neurophysiological approach to assess training outcome under stress: A virtual reality experiment of industrial shutdown maintenance using Functional Near-Infrared Spectroscopy (fNIRS). Adv. Eng. Inform. 2020, 46, 101153. [Google Scholar] [CrossRef]
- Nielson, K.A.; Powless, M. Positive and negative sources of emotional arousal enhance long-term word-list retention when induced as long as 30 min after learning. Neurobiol. Learn. Mem. 2007, 88, 40–47. [Google Scholar] [CrossRef] [Green Version]
- Tse, D.; Langston, R.F.; Kakeyama, M.; Bethus, I.; Spooner, P.A.; Wood, E.R.; Witter, M.P.; Morris, R.G. Schemas and memory consolidation. Science 2007, 316, 76–82. [Google Scholar] [CrossRef]
- Levy, R.; Goldman-Rakic, P.S. Segregation of working memory functions within the dorsolateral prefrontal cortex. In Executive Control and the Frontal Lobe: Current Issues; Springer: New York, NY, USA, 2000; pp. 23–32. [Google Scholar]
- Brainm.com; BrainMaster Technologies, Inc.: Bedford, OH, USA, 2010.
- Alice Ferng. Brodmann Areas; Ken Hub: Leipzig, Germany, 2020. [Google Scholar]
- Gerloff, C.; Corwell, B.; Chen, R.; Hallett, M.; Cohen, L.G. Stimulation over the human supplementary motor area interferes with the organization of future elements in complex motor sequences. Brain J. Neurol. 1997, 120, 1587–1602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roland, P. Organization of motor control by the normal human brain. Hum. Neurobiol. 1984, 2, 205–216. [Google Scholar] [PubMed]
- Deligianni, F.; Singh, H.; Modi, H.; Jahani, S.; Yucel, M.; Darzi, A.; Leff, D.; Yang, G. Expertise and task pressure in fNIRS-based brain connectomes. arXiv 2020, arXiv:2001.00114. [Google Scholar]
- Qin, S.; Hermans, E.J.; van Marle, H.J.; Luo, J.; Fernández, G. Acute psychological stress reduces working memory-related activity in the dorsolateral prefrontal cortex. Biol. Psychiatry 2009, 66, 25–32. [Google Scholar] [CrossRef] [PubMed]
- Karthikeyan, R.; McDonald, A.D.; Mehta, R. Stress Detection during Motor Activity: A Comparison of Neural and Physiological Biomarkers in Older Adults. 2021. in review. [Google Scholar]
- McNaught, A.D.; Wilkinson, A. Compendium of Chemical Terminology; International Union of Pure and Applied Chemistry: Research Triangle Park, NC, USA, 1997; Volume 1669. [Google Scholar]
- Scholkmann, F.; Spichtig, S.; Muehlemann, T.; Wolf, M. How to detect and reduce movement artifacts in near-infrared imaging using moving standard deviation and spline interpolation. Physiol. Meas. 2010, 31, 649. [Google Scholar] [CrossRef] [Green Version]
- Chiarelli, A.M.; Maclin, E.L.; Fabiani, M.; Gratton, G. A kurtosis-based wavelet algorithm for motion artifact correction of fNIRS data. NeuroImage 2015, 112, 128–137. [Google Scholar] [CrossRef] [Green Version]
- Delpy, D.T.; Cope, M.; van der Zee, P.; Arridge, S.; Wray, S.; Wyatt, J. Estimation of optical pathlength through tissue from direct time of flight measurement. Phys. Med. Biol. 1988, 33, 1433. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Jayagopal, J.K.; Mehta, R.K.; Erraguntla, M.; Nuamah, J.; McDonald, A.D.; Taylor, H.; Chang, S.H. Classifying major depressive disorder using fNIRS during motor rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 961–969. [Google Scholar] [CrossRef]
- Shirer, W.R.; Ryali, S.; Rykhlevskaia, E.; Menon, V.; Greicius, M.D. Decoding subject-driven cognitive states with whole-brain connectivity patterns. Cereb. Cortex 2012, 22, 158–165. [Google Scholar] [CrossRef] [PubMed]
- Abujelala, M.; Kanal, V.; Rajavenkatanarayanan, A.; Makedon, F. 9PM: A Novel Interactive 9-Peg Board for Cognitive and Physical Assessment. In Proceedings of the 14th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu, Greece, 29 June–2 July 2021. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Ding, H.; Feng, P.M.; Chen, W.; Lin, H. Identification of bacteriophage virion proteins by the ANOVA feature selection and analysis. Mol. BioSyst. 2014, 10, 2229–2235. [Google Scholar] [CrossRef]
- Sasaki, Y. The Truth of the F-Measure; School of Computer Science, University of Manchester: Manchester, UK, 2007. [Google Scholar]
- Nyberg, L.; Marklund, P.; Persson, J.; Cabeza, R.; Forkstam, C.; Petersson, K.M.; Ingvar, M. Common prefrontal activations during working memory, episodic memory, and semantic memory. Neuropsychologia 2003, 41, 371–377. [Google Scholar] [CrossRef] [Green Version]
- Shields, G.S.; Sazma, M.A.; McCullough, A.M.; Yonelinas, A.P. The effects of acute stress on episodic memory: A meta-analysis and integrative review. Psychol. Bull. 2017, 143, 636. [Google Scholar] [CrossRef] [PubMed]
- Skosnik, P.D.; Chatterton Jr, R.T.; Swisher, T.; Park, S. Modulation of attentional inhibition by norepinephrine and cortisol after psychological stress. Int. J. Psychophysiol. 2000, 36, 59–68. [Google Scholar] [CrossRef]
- Hampshire, A.; Chamberlain, S.R.; Monti, M.M.; Duncan, J.; Owen, A.M. The role of the right inferior frontal gyrus: Inhibition and attentional control. Neuroimage 2010, 50, 1313–1319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharp, D.; Bonnelle, V.; De Boissezon, X.; Beckmann, C.; James, S.; Patel, M.; Mehta, M.A. Distinct frontal systems for response inhibition, attentional capture, and error processing. Proc. Natl. Acad. Sci. USA 2010, 107, 6106–6111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saleh, S.; Jiang, Z.; Yue, G.H. Motor Control Network Effective Connectivity in Regulating Muscle Force Output. Nat. Sci. 2021, 13, 9–17. [Google Scholar]
- Mehrabi, N.; Morstatter, F.; Saxena, N.; Lerman, K.; Galstyan, A. A survey on bias and fairness in machine learning. arXiv 2019, arXiv:1908.09635. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Equation |
|---|---|
| Mean () | |
| Variance () | |
| Maximum | |
| Minimum | |
| Kurtosis | |
| Skewness | |
| AUC | |
| Corr. |
| Groups | Encoding under No-Stress | Retrieval under No-Stress | Encoding under Stress | Retrieval under Stress |
|---|---|---|---|---|
| SN | 97 | 124 | 77 | 124 |
| N | 97 | 124 | 0 | 0 |
| S | 0 | 0 | 77 | 124 |
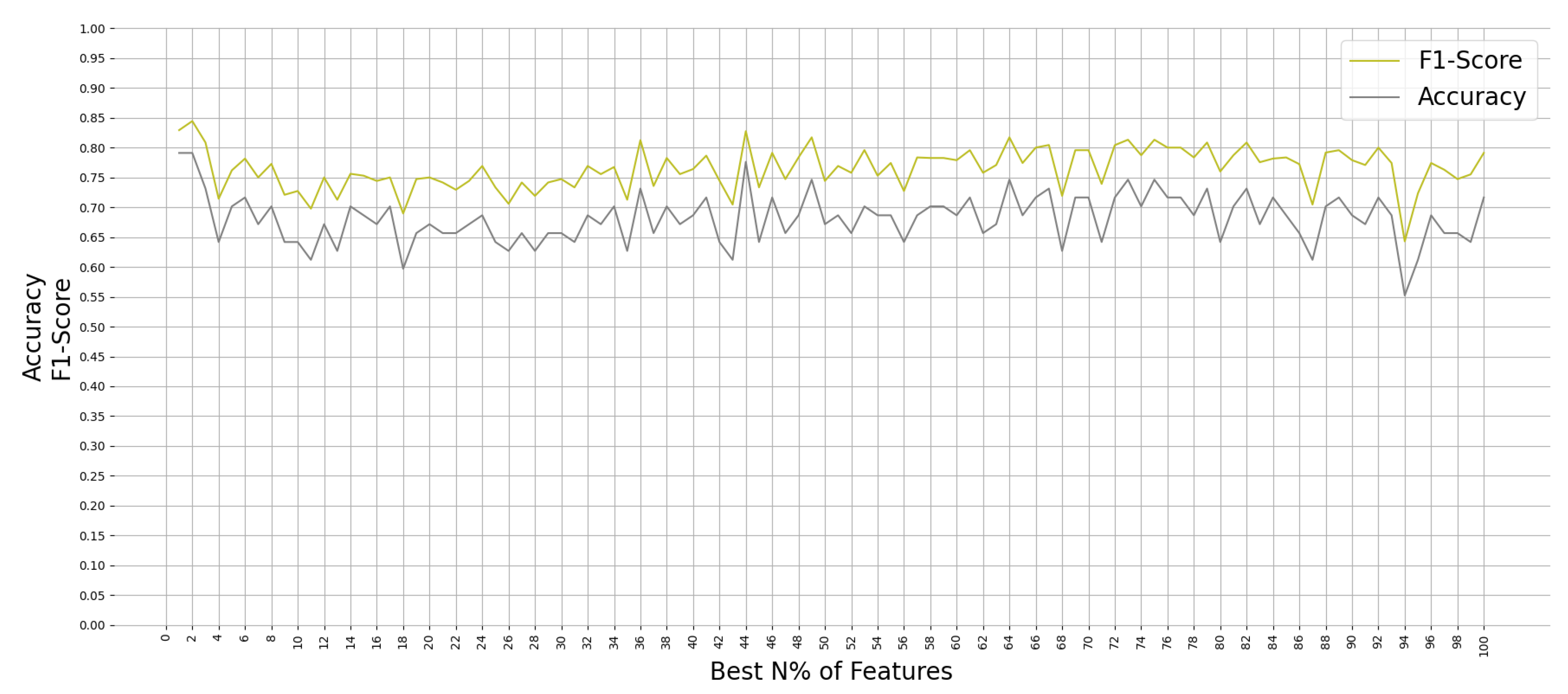
| Model | Percentage of Best Features | Accuracy | F-1 Score | Precision | Recall |
|---|---|---|---|---|---|
| RF | 2% | 79.10% | 0.844 | 0.760 | 0.950 |
| ET | 88% | 76.12% | 0.830 | 0.722 | 0.975 |
| RF | 1% | 79.10% | 0.829 | 0.810 | 0.850 |
| GB | 2% | 77.61% | 0.828 | 0.766 | 0.900 |
| RF | 44% | 77.61% | 0.828 | 0.766 | 0.900 |
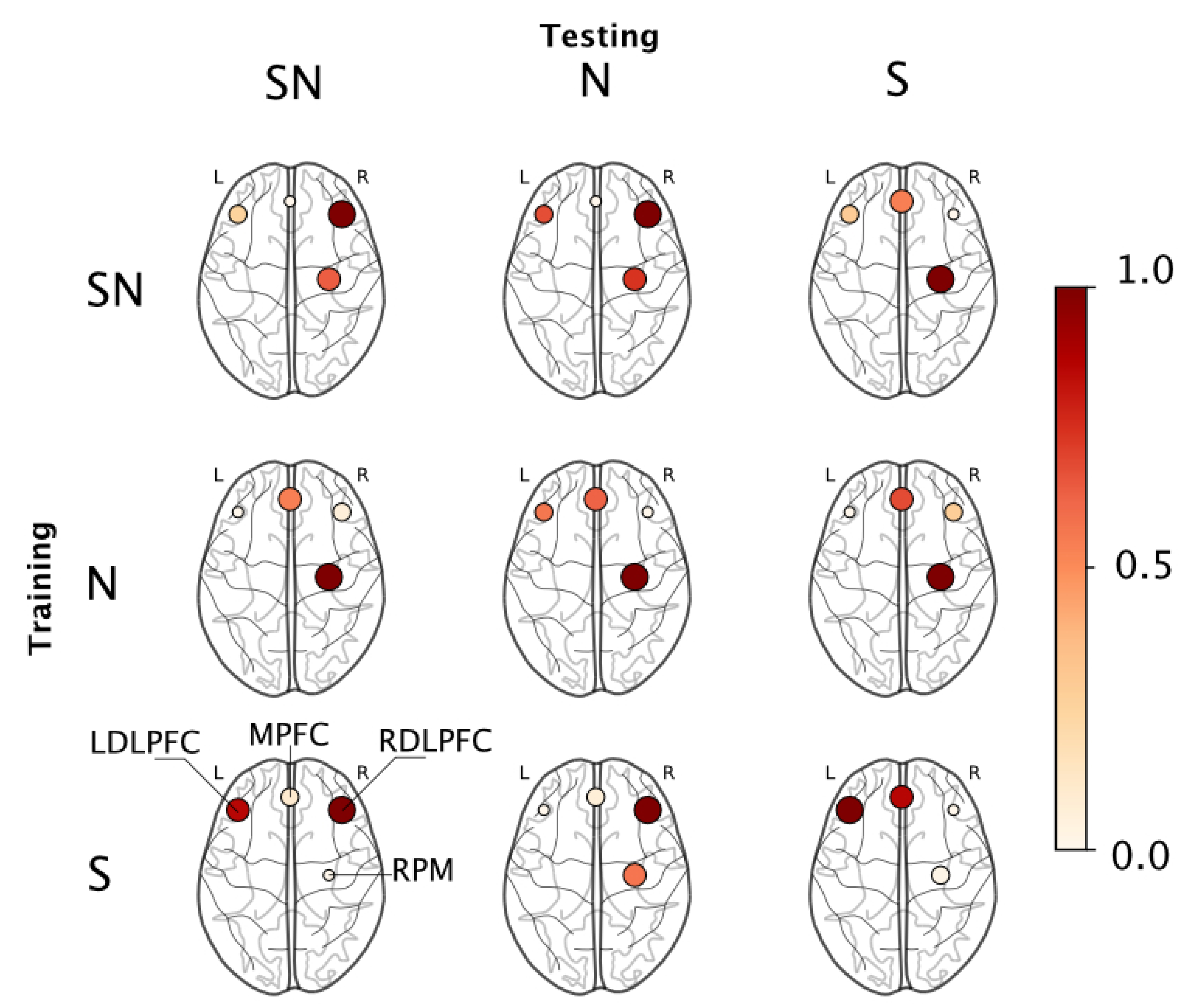
| Training Group | Testing Group | |||
| SN | N | S | ||
| SN | 79.10% F-1 = 0.844 | 81.82% F-1 = 0.864 | 76.47% F-1 = 0.826 | |
| N | 73.13% F-1 = 0.786 | 78.79% F-1 = 0.829 | 67.65% F-1 = 0.744 | |
| S | 68.66% F-1 = 0.764 | 60.61% F-1 = 0.723 | 76.47% F-1 = 0.810 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abujelala, M.; Karthikeyan, R.; Tyagi, O.; Du, J.; Mehta, R.K. Brain Activity-Based Metrics for Assessing Learning States in VR under Stress among Firefighters: An Explorative Machine Learning Approach in Neuroergonomics. Brain Sci. 2021, 11, 885. https://doi.org/10.3390/brainsci11070885
Abujelala M, Karthikeyan R, Tyagi O, Du J, Mehta RK. Brain Activity-Based Metrics for Assessing Learning States in VR under Stress among Firefighters: An Explorative Machine Learning Approach in Neuroergonomics. Brain Sciences. 2021; 11(7):885. https://doi.org/10.3390/brainsci11070885
Chicago/Turabian StyleAbujelala, Maher, Rohith Karthikeyan, Oshin Tyagi, Jing Du, and Ranjana K. Mehta. 2021. "Brain Activity-Based Metrics for Assessing Learning States in VR under Stress among Firefighters: An Explorative Machine Learning Approach in Neuroergonomics" Brain Sciences 11, no. 7: 885. https://doi.org/10.3390/brainsci11070885
APA StyleAbujelala, M., Karthikeyan, R., Tyagi, O., Du, J., & Mehta, R. K. (2021). Brain Activity-Based Metrics for Assessing Learning States in VR under Stress among Firefighters: An Explorative Machine Learning Approach in Neuroergonomics. Brain Sciences, 11(7), 885. https://doi.org/10.3390/brainsci11070885