EEG Theta Power Activity Reflects Workload among Army Combat Drivers: An Experimental Study



Abstract
1. Introduction
1.1. EEG Theta Activity as an Index of Mental Workload
1.2. Research Aims
2. Materials and Methods
2.1. Ethical Approval
2.2. Participants
2.3. Experimental Design
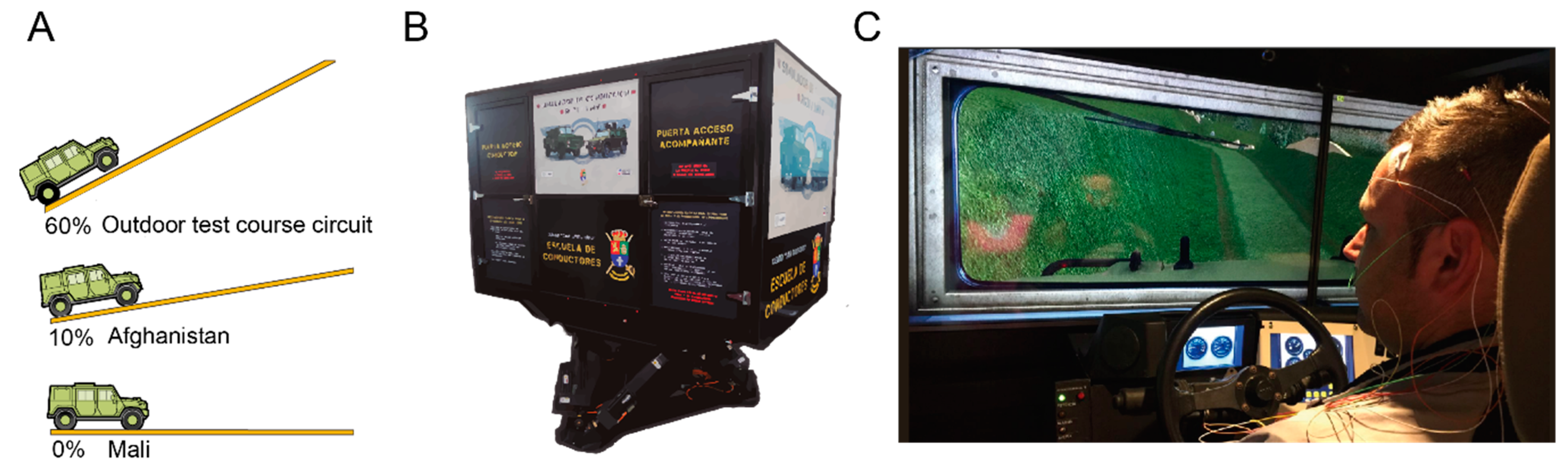
2.4. Apparatus and Simulated Military Scenarios
2.4.1. LMV “Lince” Simulator and Scenarios
2.4.2. Electroencephalographic Recording
2.5. Questionnaires
2.5.1. Stanford Sleepiness Scale (SSS)
2.5.2. NASA-Task Load Index (NASA-TLX)
2.6. Procedure
2.7. Electroencephalographic Analyses
2.8. Statistical Analysis
3. Results
3.1. Does Terrain Complexity Have an Influence on Driving Performance and Subjective Ratings of Task Load?
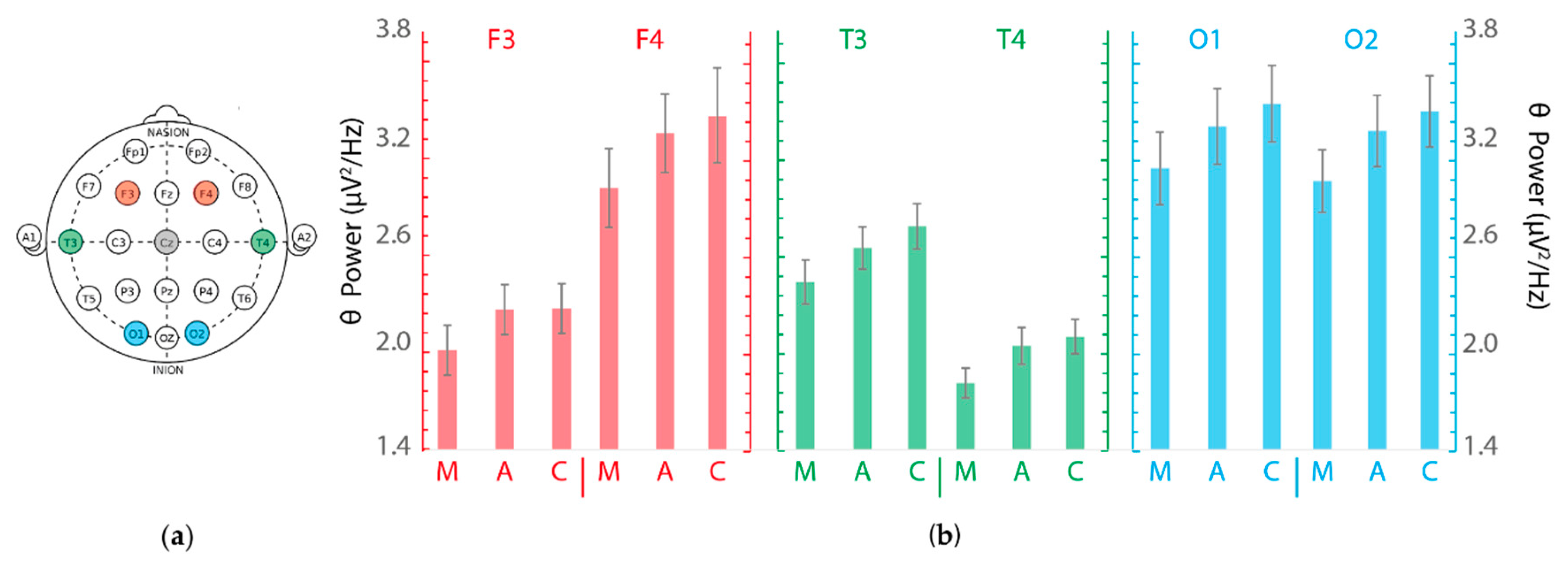
3.2. Does Terrain Complexity Have an Influence on Driver θ-Activity?
3.3. Does Fatigue due to Time on Task Have an Influence on θ-Activity?
4. Discussion
4.1. Terrain Complexity Degrades Performance and Increases the Subjective Rating of the Task Load
4.2. Terrain Complexity Increases Overall θ-Activity
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Di Stasi, L.L.; McCamy, M.B.; Martínez-Conde, S.; Gayles, E.; Hoare, C.; Foster, M.; Catena, A.; Macknik, S.L. Effects of long and short simulated flights on the saccadic eye movement velocity of aviators. Physiol. Behav. 2016, 153, 91–96. [Google Scholar] [CrossRef] [PubMed]
- Diaz-Piedra, C.; Rieiro, H.; Cherino, A.; Fuentes, L.J.; Catena, A.; Di Stasi, L.L. The effects of flight complexity on gaze entropy: An experimental study with fighter pilots. Appl. Ergon. 2019, 77, 92–99. [Google Scholar] [CrossRef] [PubMed]
- Suurd Ralph, C.; Vartanian, O.; Lieberman, H.R.; Morgan, C.A.; Cheung, B. The effects of captivity survival training on mood, dissociation, PTSD symptoms, cognitive performance and stress hormones. Int. J. Psychophysiol. 2017, 117, 37–47. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D. Multiple resources and mental workload. Hum. Factors 2008, 50, 449–455. [Google Scholar] [CrossRef] [PubMed]
- Di Stasi, L.L.; Díaz-Piedra, C.; Suárez, J.; McCamy, M.B.; Martínez-Conde, S.; Roca-Dorda, J.; Catena, A. Task complexity modulates pilot electroencephalographic activity during real flights. Psychophysiology 2015, 52, 951–956. [Google Scholar] [CrossRef] [PubMed]
- Morales, J.M.; Ruiz-Rabelo, J.F.; Diaz-Piedra, C.; Di Stasi, L.L. Detecting mental workload in surgical teams using a wearable single-channel electroencephalographic device. J. Surg. Educ. 2019, 76, 1107–1115. [Google Scholar] [CrossRef] [PubMed]
- Friedl, K.E. Military applications of soldier physiological monitoring. J. Sci. Med. Sport 2018, 21, 1147–1153. [Google Scholar] [CrossRef]
- Mitchell, D.K. Mental Workload and ARL Workload Modeling Tools; US Army Research Laboratory: Aberdeen, MD, USA, 2000. [Google Scholar]
- Lu, S.; Zhang, M.Y.; Ersal, T.; Yang, X.J. Workload management in teleoperation of unmanned ground vehicles: Effects of a delay compensation aid on human operators’ workload and teleoperation performance. Int. J. Hum. Comput. Int. 2019, 35, 1820–1830. [Google Scholar] [CrossRef]
- Mao, M.; Xie, F.; Hu, J.; Su, B. Analysis of workload of tank crew under the conditions of informatization. Def. Technol. 2014, 10, 17–21. [Google Scholar] [CrossRef]
- Billing, D.C.; Drain, J.R. International Congress on Soldiers’ Physical Performance 2017: Research priorities across the service members operational lifecycle. J. Sci. Med. Sport 2017, 20, S1–S3. [Google Scholar] [CrossRef]
- Carden, P.P.J.; Izard, R.M.; Greeves, J.P.; Lake, J.P.; Myers, S.D. Force and acceleration characteristics of military foot drill: Implications for injury risk in recruits. BMJ Open Sport Exerc. Med. 2015, 1, bmjsem-2015-000025. [Google Scholar] [CrossRef] [PubMed]
- Cole, K.S.; Morrow, J.D.; Davis, J. The Effects of Visual-Manual Tasks on Driving Performance Using a Military Vehicle on a Dirt Road; Sandia National Lab.: Albuquerque, NM, USA, 2011. [Google Scholar]
- Oron-Gilad, T.; Shinar, D. Driver fatigue among military truck drivers. Transp. Res. Part F Traffic Psychol. Behav. 2000, 3, 195–209. [Google Scholar] [CrossRef]
- Weeks, S.R.; McAuliffe, C.L.; DuRussel, D.; Pasquina, P.F. Physiological and psychological fatigue in extreme conditions: The military example. PM R 2010, 2, 438–441. [Google Scholar] [CrossRef] [PubMed]
- Leggat, P.A.; Smith, D.R. Military training and musculoskeletal disorders. J. Musculoskelet. Pain 2007, 15, 25–32. [Google Scholar] [CrossRef]
- Flower, R.; Dando, M.; Hay, A.; Iverson, S.; Robbins, T.; Robinson, J.P.; Rose, S.; Stirling, A.; Tracey, I.; Wessely, S. Brain Waves Module 3: Neuroscience, Conflict and Security; Flower, R., Ed.; Royal Society: London, UK, 2012; Volume 6, ISBN 978-0-85403-938-8. [Google Scholar]
- Chérif, L.; Wood, V.; Marois, A.; Labonté, K.; Vachon, F. Multitasking in the military: Cognitive consequences and potential solutions. Appl. Cogn. Psychol. 2018, 32, 429–439. [Google Scholar] [CrossRef]
- Cogan, A.; Cervelli, L.; Dillahunt-Aspillaga, T.; Rossiter, A.G. Treating military service members and veterans in the private sector: Information and resources for clinicians. Arch. Phys. Med. Rehabil. 2018, 99, 2659–2661. [Google Scholar] [CrossRef]
- Kraft, M.; Amick, M.; Barth, J.; French, L.; Lew, H. A review of driving simulator parameters relevant to the Operation Enduring Freedom/Operation Iraqi Freedom veteran population. Am. J. Phys. Med. Rehabil. 2010, 89, 336–344. [Google Scholar] [CrossRef]
- Kerick, S.E.; Hatfield, B.D.; Allender, L.E. Event-related cortical dynamics of soldiers during shooting as a function of varied task demand. Aviat. Space Environ. Med. 2007, 78, B153–B164. [Google Scholar]
- Blacker, K.J.; Hamilton, J.; Roush, G.; Pettijohn, K.A.; Biggs, A.T. Cognitive training for military application: A review of the literature and practical guide. J. Cogn. Enhanc. 2019, 3, 30–51. [Google Scholar] [CrossRef]
- Nindl, B.C.; Beals, K.; Witchalls, J.; Friedl, K.E. Military human performance optimization and injury prevention: Strategies for the 21st century warfighter. J. Sci. Med. Sport 2017, 20, S1–S2. [Google Scholar] [CrossRef]
- Lew, H.; Rosen, P.; Thomander, D.; Poole, J. The potential utility of driving simulators in the cognitive rehabilitation of combat-returnees with traumatic brain injury. J. Head Trauma Rehabil. 2009, 24, 51–56. [Google Scholar] [CrossRef] [PubMed]
- UK Ministry of Defence. Deaths in the UK Regular Armed Forces: Annual Summary and Trends over Time 1 January 2008 to 31 December 2017; UK Ministry of Defence: London, UK, 2018.
- Lasher, W.T. US Army Training and Doctrine Command Safety and Occupational Health Program; US Army Training and Doctrine Command: Newport News, VA, USA, 2019. [Google Scholar]
- Army Public Health Center. U.S. Army Public Health Center Injury prevention: Just the facts. Privately-owned vehicle-related injuries; FACT SHEET 12-009-0516; Army Public Health Center: Aberdeen, MD, USA, 2018. [Google Scholar]
- Lo, M.C.; Giffin, R.P.; Pakulski, K.A.; Davis, W.S.; Bernstein, S.A.; Wise, D.V. High-mobility multipurpose wheeled vehicle rollover accidents and injuries to U.S. Army soldiers by reported occupant restraint use. Mil. Med. 2017, 182, e1782–e1791. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Paxion, J.; Galy, E.; Berthelon, C. Mental workload and driving. Front. Psychol. 2014, 5, 1344. [Google Scholar] [CrossRef] [PubMed]
- Bier, L.; Wolf, P.; Hilsenbek, H.; Abendroth, B. How to measure monotony-related fatigue? A systematic review of fatigue measurement methods for use on driving tests. Theor. Issues Ergon. Sci. 2018, 21, 22–55. [Google Scholar] [CrossRef]
- Morales, J.M.; Díaz-Piedra, C.; Rieiro, H.; Roca-González, J.; Romero, S.; Catena, A.; Fuentes, L.J.; Di Stasi, L.L. Monitoring driver fatigue using a single-channel electroencephalographic device: A validation study by gaze-based, driving performance, and subjective data. Accid. Anal. Prev. 2017, 109, 62–69. [Google Scholar] [CrossRef]
- Wang, Y.-K.; Jung, T.-P.; Lin, C.-T. Theta and alpha oscillations in attentional interaction during distracted driving. Front. Behav. Neurosci. 2018, 12, 3. [Google Scholar] [CrossRef]
- Leung, G.T.C.; Yucel, G.; Duffy, V.G. The effects of virtual industrial training on mental workload during task performance. Hum. Factor Ergon. Man. 2010, 20, 567–578. [Google Scholar] [CrossRef]
- Almahasneh, H.; Chooi, W.-T.; Kamel, N.; Malik, A.S. Deep in thought while driving: An EEG study on drivers’ cognitive distraction. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 218–226. [Google Scholar] [CrossRef]
- Sauseng, P.; Griesmayr, B.; Freunberger, R.; Klimesch, W. Control mechanisms in working memory: A possible function of EEG theta oscillations. Neurosci. Biobehav. Rev. 2010, 34, 1015–1022. [Google Scholar] [CrossRef]
- Herweg, N.A.; Solomon, E.A.; Kahana, M.J. Theta oscillations in human memory. Trends Cogn. Sci. 2020, 24, 208–227. [Google Scholar] [CrossRef]
- Schacter, D.L. EEG theta waves and psychological phenomena: A review and analysis. Biol. Psychol. 1977, 5, 47–82. [Google Scholar] [CrossRef]
- Mun, S.; Whang, M.; Park, S.; Park, M.-C. Effects of mental workload on involuntary attention: A somatosensory ERP study. Neuropsychologia 2017, 106, 7–20. [Google Scholar] [CrossRef] [PubMed]
- Brookings, J.B.; Wilson, G.F.; Swain, C.R. Psychophysiological responses to changes in workload during simulated air traffic control. Biol. Psychol. 1996, 42, 361–377. [Google Scholar] [CrossRef]
- Kahana, M.J.; Seelig, D.; Madsen, J.R. Theta returns. Curr. Opin. Neurobiol. 2001, 11, 739–744. [Google Scholar] [CrossRef]
- Huang, L.-Y.; She, H.-C.; Chou, W.-C.; Chuang, M.-H.; Duann, J.-R.; Jung, T.-P. Brain oscillation and connectivity during a chemistry visual working memory task. Int. J. Psychophysiol. 2013, 90, 172–179. [Google Scholar] [CrossRef]
- Puma, S.; Matton, N.; Paubel, P.-V.; Raufaste, É.; El-Yagoubi, R. Using theta and alpha band power to assess cognitive workload in multitasking environments. Int. J. Psychophysiol. 2018, 123, 111–120. [Google Scholar] [CrossRef]
- Arthur, F. Kramer Physiological metrics of mental workload: A review of recent progress. In Multiple-Task Performance; Taylor & Francis Inc.: Bristol, PA, USA, 1991; pp. 279–328. [Google Scholar]
- Schultze-Kraft, M.; Dähne, S.; Gugler, M.; Curio, G.; Blankertz, B. Unsupervised classification of operator workload from brain signals. J. Neural Eng. 2016, 13, 036008. [Google Scholar] [CrossRef]
- Inouye, T.; Shinosaki, K.; Iyama, A.; Matsumoto, Y.; Toi, S.; Ishihara, T. Potential flow of frontal midline theta activity during a mental task in the human electroencephalogram. Neurosci. Lett. 1994, 169, 145–148. [Google Scholar] [CrossRef]
- Sebastiani, M.; Di Flumeri, G.; Aricò, P.; Sciaraffa, N.; Babiloni, F.; Borghini, G. Neurophysiological vigilance characterisation and assessment: Laboratory and realistic validations involving professional air traffic controllers. Brain Sci. 2020, 10, 48. [Google Scholar] [CrossRef]
- Gevins, A.; Smith, M.E.; McEvoy, L.; Yu, D. High-resolution EEG mapping of cortical activation related to working memory: Effects of task difficulty, type of processing, and practice. Cereb. Cortex 1997, 7, 374–385. [Google Scholar] [CrossRef]
- Babiker, A.; Faye, I.; Mumtaz, W.; Malik, A.S.; Sato, H. EEG in classroom: EMD features to detect situational interest of students during learning. Multimed. Tools Appl. 2019, 78, 16261–16281. [Google Scholar] [CrossRef]
- Yamamoto, S.; Matsuoka, S. Topographic EEG study of visual display terminal (VDT) performance with special reference to frontal midline theta waves. Brain Topogr. 1990, 2, 257–267. [Google Scholar] [CrossRef] [PubMed]
- Teo, G.; Reinerman-Jones, L.; Matthews, G.; Szalma, J.; Jentsch, F.; Hudson, I.; Hancock, P.A. Selecting workload and stress measures for performance prediction. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2017, 61, 2042–2046. [Google Scholar] [CrossRef]
- Borghini, G.; Astolfi, L.; Vecchiato, G.; Mattia, D.; Babiloni, F. Measuring neurophysiological signals in aircraft pilots and car drivers for the assessment of mental workload, fatigue and drowsiness. Neurosci. Biobehav. Rev. 2014, 44, 58–75. [Google Scholar] [CrossRef]
- Zokaei, M.; Jafari, M.J.; Khosrowabadi, R.; Nahvi, A.; Khodakarim, S.; Pouyakian, M. Tracing the physiological response and behavioral performance of drivers at different levels of mental workload using driving simulators. J. Saf. Res. 2020, 72, 213–223. [Google Scholar] [CrossRef] [PubMed]
- Abd Rahman, N.I.; Md Dawal, S.Z.; Yusoff, N. Driving mental workload and performance of ageing drivers. Transp. Res. Part F Traffic Psychol. Behav. 2020, 69, 265–285. [Google Scholar] [CrossRef]
- Carretta, T.R.; King, R.E.; Ree, M.J.; Teachout, M.S.; Barto, E. Compilation of cognitive and personality norms for military aviators. Aerosp. Med. Hum. Perform. 2016, 87, 764–771. [Google Scholar] [CrossRef]
- National Research Council (US) Committee on Opportunities in Neuroscience for Future Army Applications. Opportunities in Neuroscience for Future Army Applications; National Academies Press (US): Washington, DC, USA, 2009; ISBN 978-0-309-12740-0.
- Mukherjee, S.; Kumar, U.; Mandal, M.K. Status of military psychology in India: A review. J. Indian Acad. Appl. Psychol. 2009, 35, 181–194. [Google Scholar]
- Di Flumeri, G.; Borghini, G.; Aricò, P.; Sciaraffa, N.; Lanzi, P.; Pozzi, S.; Vignali, V.; Lantieri, C.; Bichicchi, A.; Simone, A.; et al. EEG-based mental workload neurometric to evaluate the impact of different traffic and road conditions in real driving settings. Front. Hum. Neurosci. 2018, 12, 509. [Google Scholar] [CrossRef]
- Bongiorno, N.; Bosurgi, G.; Pellegrino, O.; Sollazzo, G. How is the driver’s workload influenced by the road environment? Procedia Eng. 2017, 187, 5–13. [Google Scholar] [CrossRef]
- Williams, J.R. The Declaration of Helsinki and public health. Bull. World Health Organ. 2008, 86, 650–652. [Google Scholar] [CrossRef] [PubMed]
- Hoddes, E.; Zarcone, V.; Smythe, H.; Phillips, R.; Dement, W.C. Quantification of sleepiness: A new approach. Psychophysiology 1973, 10, 431–436. [Google Scholar] [CrossRef] [PubMed]
- Green, P.; Lin, B.; Bagian, T. Driver Workload as a Function of Road Geometry: A Pilot Experiment; Great Lakes Center for Truck and Transit Research: Ann Arbor, MI, USA, 1994; p. 60. [Google Scholar]
- Cerezo, V.; Conche, F. Risk assessment in ramps for heavy vehicles—A French study. Accid. Anal. Prev. 2016, 91, 183–189. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Klem, G.H.; Luèders, H.O.; Jasper, H.H.; Elger, C. The ten-twenty electrode system of the International Federation. Electroencephalogr. Clin. Neurophysiol. 1999, 52, 3–6. [Google Scholar]
- Ko, L.-W.; Chang, Y.; Wu, P.-L.; Tzou, H.-A.; Chen, S.-F.; Tang, S.-C.; Yeh, C.-L.; Chen, Y.-J. Development of a smart helmet for strategical BCI applications. Sensors 2019, 19, 1867. [Google Scholar] [CrossRef]
- Kim, Y.S.; Baek, H.J.; Kim, J.S.; Lee, H.B.; Choi, J.M.; Park, K.S. Helmet-based physiological signal monitoring system. Eur. J. Appl. Physiol. 2009, 105, 365–372. [Google Scholar] [CrossRef]
- Hart, S.G. NASA-task load index (NASA-TLX); 20 years later. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Francisco, CA, USA, 16–20 October 2006; Volume 50, pp. 904–908. [Google Scholar]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar]
- Gratton, G.; Coles, M.G.H.; Donchin, E. A new method for off-line removal of ocular artifact. Electroencephalogr. Clin. Neurophysiol. 1983, 55, 468–484. [Google Scholar] [CrossRef]
- Smith, M.E.; Gevins, A.; Brown, H.; Karnik, A.; Du, R. Monitoring task loading with multivariate EEG measures during complex forms of human-computer interaction. Hum. Factors 2001, 43, 366–380. [Google Scholar] [CrossRef]
- Craig, A.; Tran, Y.; Wijesuriya, N.; Nguyen, H. Regional brain wave activity changes associated with fatigue. Psychophysiology 2012, 49, 574–582. [Google Scholar] [CrossRef]
- Mollenhauer, M.A.; Romano, R.A.; Brumm, B. The evaluation of a motion base driving simulator in a cave at tacom. In Transformational Science and Technology for the Current and Future Force; World Scientific Pub Co Inc.: 5 Toh Tuck Link, Singapore, 2006; Volume 42, pp. 323–330. ISBN 978-981-270-201-2. [Google Scholar]
- Smith, M.E.; Gevins, A. Neurophysiologic monitoring of mental workload and fatigue during operation of a flight simulator. In Proceedings of the Biomonitoring for Physiological and Cognitive Performance during Military Operations, Orlando, FL, USA, 31 March–1 April 2005; Volume 5797. [Google Scholar]
- Lohani, M.; Payne, B.R.; Strayer, D.L. A review of psychophysiological measures to assess cognitive states in real-world driving. Front. Hum. Neurosci. 2019, 13, 57. [Google Scholar] [CrossRef] [PubMed]
- Gammeri, R.; Iacono, C.; Ricci, R.; Salatino, A. Unilateral spatial neglect after stroke: Current insights. Neuropsychiatr. Dis. Treat. 2020, 16, 131–152. [Google Scholar] [CrossRef] [PubMed]
- Gundel, A.; Wilson, G.F. Topographical changes in the ongoing EEG related to the difficulty of mental tasks. Brain Topogr. 1992, 5, 17–25. [Google Scholar] [CrossRef] [PubMed]
- Sammer, G.; Blecker, C.; Gebhardt, H.; Bischoff, M.; Stark, R.; Morgen, K.; Vaitl, D. Relationship between regional hemodynamic activity and simultaneously recorded EEG-theta associated with mental arithmetic-induced workload. Hum. Brain Mapp. 2007, 28, 793–803. [Google Scholar] [CrossRef] [PubMed]
- John, A.; Schöllhorn, W.I. Acute effects of instructed and self-created variable rope skipping on EEG brain activity and heart rate variability. Front. Behav. Neurosci. 2018, 12, 311. [Google Scholar] [CrossRef] [PubMed]
- Ives-Deliperi, V.L.; Butler, J.T. Relationship between EEG electrode and functional cortex in the international 10 to 20 system. J. Clin. Neurophysiol. 2018, 35, 504–509. [Google Scholar] [CrossRef] [PubMed]
- Billeke, P.; Zamorano, F.; Cosmelli, D.; Aboitiz, F. Oscillatory brain activity correlates with risk perception and predicts social decisions. Cereb. Cortex 2013, 23, 2872–2883. [Google Scholar] [CrossRef]
- Dussault, C.; Jouanin, J.-C.; Philippe, M.; Guezennec, C.-Y. EEG and ECG Changes During Simulator Operation Reflect Mental Workload and Vigilance. Aviat. Space Environ. Med. 2005, 76, 344–351. [Google Scholar]
- Eoh, H.J.; Chung, M.K.; Kim, S.-H. Electroencephalographic study of drowsiness in simulated driving with sleep deprivation. Int. J. Ind. Ergon. 2005, 35, 307–320. [Google Scholar] [CrossRef]
- Yerkes, R.M.; Dodson, J.D. The relation of strength of stimulus to rapidity of habit-formation. J. Comp. Neurol. Psychol. 1908, 18, 459–482. [Google Scholar] [CrossRef]
- Diaz-Piedra, C.; Gomez-Milan, E.; Di Stasi, L.L. Nasal skin temperature reveals changes in arousal levels due to time on task: An experimental thermal infrared imaging study. Appl. Ergon. 2019, 81, 102870. [Google Scholar] [CrossRef] [PubMed]
- Sebastián Guerrero, M.V.; Arana Aritméndiz, M.V.; Arcos Sánchez, C.; Navascués Sanagustín, M.A.; Idiazábal Alecha, M.Á.; Ruiz López, C.; Iso Pérez, J.M. Attention processes in military simulation tasks: Gender-associated differences. Rev. Científica Soc. Enfermería Neurol. 2018, 48, 2–8. [Google Scholar] [CrossRef]
- Roy, Y.; Banville, H.; Albuquerque, I.; Gramfort, A.; Falk, T.H.; Faubert, J. Deep learning-based electroencephalography analysis: A systematic review. J. Neural Eng. 2019, 16, 051001. [Google Scholar] [CrossRef] [PubMed]
- Wu, E.Q.; Deng, P.-Y.; Qu, X.-Y.; Tang, Z.; Zhang, W.-M.; Zhu, L.-M.; Ren, H.; Zhou, G.-R.; Sheng, R.S.F. Detecting fatigue status of pilots based on deep learning network using EEG signals. IEEE Trans. Cogn. Dev. Syst. 2020, in press. [Google Scholar] [CrossRef]
- Hollands, J.G.; Spivak, T.; Kramkowski, E.W. Cognitive load and situation awareness for soldiers: Effects of message presentation rate and sensory modality. Hum. Factors 2019, 61, 763–773. [Google Scholar] [CrossRef] [PubMed]
- Wascher, E.; Arnau, S.; Reiser, J.E.; Rudinger, G.; Karthaus, M.; Rinkenauer, G.; Dreger, F.; Getzmann, S. Evaluating mental load during realistic driving simulations by means of round the ear electrodes. Front. Neurosci. 2019, 13, 940. [Google Scholar] [CrossRef]
- Janelle, C.M.; Hatfield, B.D. Visual attention and brain processes that underlie expert performance: Implications for sport and military psychology. Mil. Psychol. 2008, 20, S39–S69. [Google Scholar] [CrossRef]
- Trochowska, K. Cultural neuroscience and the military: Applications, perspectives, controversies. In Advances in Culturally-Aware Intelligent Systems and in Cross-Cultural Psychological Studies; Faucher, C., Ed.; Springer: Cham, The Netherlands, 2018; pp. 283–310. ISBN 978-3-319-67024-9. [Google Scholar]



{kind=link}
{kind=link}
| Mali Scenario Low Complexity | Afghanistan Scenario Medium Complexity | Circuit Scenario High Complexity | |
|---|---|---|---|
| NASA-TLX | 13.31 ± 13.10 | 46.05 ± 19.26 | 35.62 ± 14.73 |
| Engine stops | 0.03 ± 0.16 | 0.41 ± 0.64 | 0.15 ± 0.37 |
| Eyes-Open Resting State (pre) | Mali Scenario Low Complexity | Afghanistan Scenario Medium Complexity | Circuit Scenario High Complexity | Eyes-Open Resting State (Post) | ||
|---|---|---|---|---|---|---|
| θ-activity | F3 | 1.30 ± 0.68 | 1.97 ± 0.84 | 2.20 ± 0.85 | 2.21 ± 0.84 | 1.31 ± 0.65 |
| F4 | 1.76 ± 1.23 | 2.90 ± 1.34 | 3.22 ± 1.33 | 3.32 ± 1.61 | 1.82 ± 1.35 | |
| T3 | 1.68 ± 0.71 | 2.36 ± 0.75 | 2.56 ± 0.72 | 2.68 ± 0.77 | 1.71 ± 0.85 | |
| T4 | 1.50 ± 0.57 | 1.78 ± 0.50 | 1.99 ± 0.63 | 2.05 ± 0.58 | 1.53 ± 0.60 | |
| O1 | 2.38 ± 1.08 | 3.01 ± 1.23 | 3.26 ± 1.29 | 3.39 ± 1.30 | 2.40 ± 1.26 | |
| O2 | 2.47 ± 1.13 | 2.94 ± 1.06 | 3.23 ± 1.21 | 3.34 ± 1.20 | 2.46 ± 1.30 | |
| Mean | 1.85 | 2.49 | 2.74 | 2.83 | 1.87 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diaz-Piedra, C.; Sebastián, M.V.; Di Stasi, L.L. EEG Theta Power Activity Reflects Workload among Army Combat Drivers: An Experimental Study. Brain Sci. 2020, 10, 199. https://doi.org/10.3390/brainsci10040199
Diaz-Piedra C, Sebastián MV, Di Stasi LL. EEG Theta Power Activity Reflects Workload among Army Combat Drivers: An Experimental Study. Brain Sciences. 2020; 10(4):199. https://doi.org/10.3390/brainsci10040199
Chicago/Turabian StyleDiaz-Piedra, Carolina, María Victoria Sebastián, and Leandro L. Di Stasi. 2020. "EEG Theta Power Activity Reflects Workload among Army Combat Drivers: An Experimental Study" Brain Sciences 10, no. 4: 199. https://doi.org/10.3390/brainsci10040199
APA StyleDiaz-Piedra, C., Sebastián, M. V., & Di Stasi, L. L. (2020). EEG Theta Power Activity Reflects Workload among Army Combat Drivers: An Experimental Study. Brain Sciences, 10(4), 199. https://doi.org/10.3390/brainsci10040199