Combination of Robust Algorithm and Head-Tracking for a Feedforward Active Headrest

 ,
,
Abstract
1. Introduction
2. Design of the Optimal Filter Coefficients of Active Headrest with Traditional Algorithm
3. Proposed Active Headrest with Robust Algorithm and Head-Tracking
3.1. Robust Algorithm for the Active Headrest
3.2. Head-Tracking System
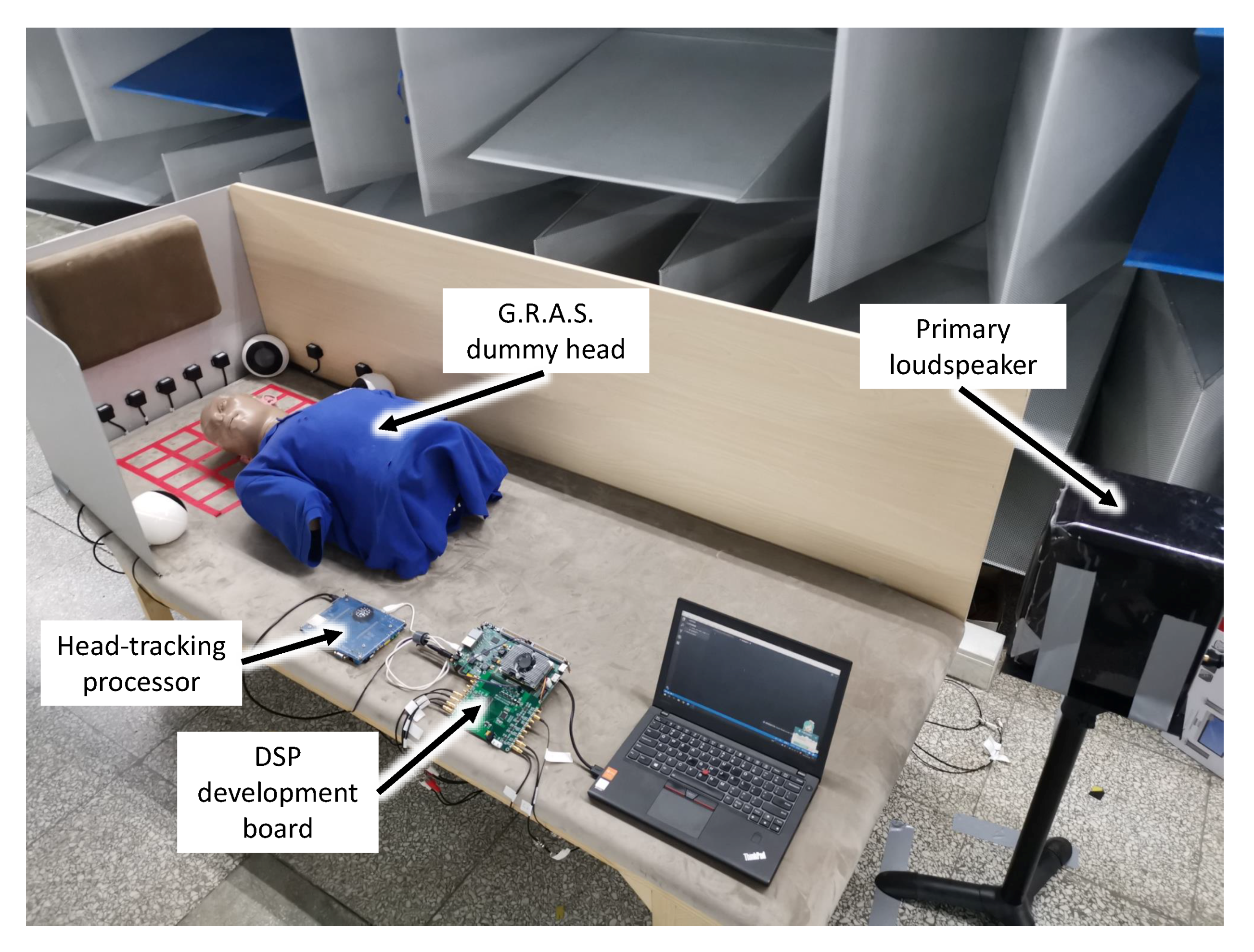
4. Experiments and Noise Control Performance
5. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Kuo, S.M.; Morgan, D.R. Active noise control: A tutorial review. Proc. IEEE 1999, 87, 943–973. [Google Scholar] [CrossRef]
- Joseph, P.; Elliott, S.J.; Nelson, P.A. Near Field Zones of Quiet. J. Sound Vib. 1994, 172, 605–627. [Google Scholar] [CrossRef]
- Kajikawa, Y.; Gan, W.; Kuo, S.M. Recent advances on active noise control: Open issues and innovative applications. APSIPA Trans. Signal Inf. Process. 2012, 1, e3. [Google Scholar] [CrossRef]
- Diaz, J.; Egaña, J.M.; Viñolas, J. A local active noise control system based on a virtual-microphone technique for railway sleeping vehicle applications. Mech. Syst. Signal Process. 2006, 20, 2259–2276. [Google Scholar] [CrossRef]
- Guo, H.; Wang, Y.S.; Liu, N.N.; Yu, R.P.; Chen, H.; Liu, X.T. Active Interior Noise Control for Rail Vehicle Using a Variable Step-Size Median-LMS Algorithm. Mech. Syst. Signal Process. 2018, 109, 15–26. [Google Scholar] [CrossRef]
- Siswanto, A.; Chang, C.Y.; Kuo, S.M. Active Noise Control for Headrests. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Hong Kong, China, 16–19 December 2015; Volume 1, pp. 688–692. [Google Scholar] [CrossRef]
- De Diego, M.; Gonzalez, A. Performance Evaluation of Multichannel Adaptive Algorithms for Local Active Noise Control. J. Sound Vib. 2001, 244, 615–634. [Google Scholar] [CrossRef]
- Olson, H.F.; May, E.G. Electronic sound absorber. J. Acoust. Soc. Am. 1953, 25, 1130–1136. [Google Scholar] [CrossRef]
- Rafaely, B.; Elliott, S.J. H2/H∞ active control of sound in a headrest: Design and implementation. IEEE Trans. Control Syst. Technol. 1999, 7, 79–84. [Google Scholar] [CrossRef]
- Rafaely, B.; Elliott, S.J.; Garcia-Bonito, J. Broadband performance of an active headrest. J. Acoust. Soc. Am. 1999, 106, 787–793. [Google Scholar] [CrossRef] [PubMed]
- Das, D.; Moreau, D.; Cazzolato, B. Performance Evaluation of an Active Headrest Using the Remote Microphone Technique. In Proceedings of the Annual Conference of the Australian Acoustical Society, Gold Coast, Australia, 2–4 November 2011. [Google Scholar]
- Pawelczyk, M. Adaptive noise control algorithms for active headrest system. Control Eng. Pract. 2004, 12, 1101–1112. [Google Scholar] [CrossRef]
- Moreau, D.; Cazzolato, B.; Zander, A.; Petersen, C. A review of virtual sensing algorithms for active noise control. Algorithms 2008, 1, 69–99. [Google Scholar] [CrossRef]
- Buck, J.; Jukkert, S.; Sachau, D. Performance Evaluation of an Active Headrest Considering Non-Stationary Broadband Disturbances and Head Movement. J. Acoust. Soc. Am. 2018, 143, 2571–2579. [Google Scholar] [CrossRef] [PubMed]
- Lei, C.; Xu, J.; Wang, J.; Zheng, C.; Li, X. Active headrest with robust performance against head movement. J. Low Freq. Noise Vib. Act. Control 2015, 34, 233–250. [Google Scholar] [CrossRef]
- Jung, W.; Elliott, S.J.; Cheer, J. Combining the Remote Microphone Technique with Head-Tracking for Local Active Sound Control. J. Acoust. Soc. Am. 2017, 142, 298–307. [Google Scholar] [CrossRef] [PubMed]
- Elliott, S.J.; Jung, W.; Cheer, J. Head tracking extends local active control of broadband sound to higher frequencies. Sci. Rep. 2018, 8, 5403. [Google Scholar] [CrossRef] [PubMed]
- Behera, S.K.; Das, D.P.; Subudhi, B. Active headrest with moving error microphone for real-time adaptive noise control. In Proceedings of the 2017 Indian Control Conference (ICC), Guwahati, India, 4–6 January 2017; pp. 356–363. [Google Scholar] [CrossRef]
- Behera, S.K.; Das, D.P.; Subudhi, B. Head movement immune active noise control with head mounted moving microphones. J. Acoust. Soc. Am. 2017, 142, 573–587. [Google Scholar] [CrossRef] [PubMed]
- Han, R.; Wu, M.; Wang, X.; Sun, H.; Yang, J. A design method of robust active headrests. J. Appl. Acoust. 2018, 37, 664–670. [Google Scholar] [CrossRef]
- Jin, X.S. Key Problems Faced in High-Speed Train Operation. In China’s High-Speed Rail Technology: An International Perspective; Advances in High-Speed Rail, Technology; Fang, Y., Zhang, Y.H., Eds.; Springer: Singapore, 2018; pp. 27–45. [Google Scholar] [CrossRef]
- Garcia-Bonito, J.; Elliott, S.J.; Boucher, C.C. Generation of Zones of Quiet Using a Virtual Microphone Arrangement. J. Acoust. Soc. Am. 1997, 101, 3498–3516. [Google Scholar] [CrossRef]
- Weng, S.K.; Kuo, C.M.; Tu, S.K. Video Object Tracking Using Adaptive Kalman Filter. J. Vis. Commun. Image Represent. 2006, 17, 1190–1208. [Google Scholar] [CrossRef]
- Sinopoli, B.; Schenato, L.; Franceschetti, M.; Poolla, K.; Jordan, M.I.; Sastry, S.S. Kalman Filtering with Intermittent Observations. IEEE Trans. Autom. Control 2004, 49, 1453–1464. [Google Scholar] [CrossRef]
- Li, X.; Wang, K.; Wang, W.; Li, Y. A Multiple Object Tracking Method Using Kalman Filter. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1862–1866. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nosie Reduction (dB) | With Traditional Algorithm | With Robust Algorithm | |||
|---|---|---|---|---|---|
| Left Ear | Right Ear | Left Ear | ight Ear | ||
| no rotation | 16.4 | 17.0 | 11.8 | 13.4 | |
| leftward | 15.7 | 11.9 | 10.9 | 12.3 | |
| 14.4 | 8.1 | 11.6 | 11.4 | ||
| 12.9 | 6.3 | 12.7 | 11.0 | ||
| rightward | 9.6 | 14.8 | 11.3 | 13.5 | |
| 7.2 | 14.0 | 10.8 | 13.7 | ||
| 6.0 | 13.4 | 10.6 | 14.1 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, R.; Wu, M.; Gong, C.; Jia, S.; Han, T.; Sun, H.; Yang, J. Combination of Robust Algorithm and Head-Tracking for a Feedforward Active Headrest. Appl. Sci. 2019, 9, 1760. https://doi.org/10.3390/app9091760
Han R, Wu M, Gong C, Jia S, Han T, Sun H, Yang J. Combination of Robust Algorithm and Head-Tracking for a Feedforward Active Headrest. Applied Sciences. 2019; 9(9):1760. https://doi.org/10.3390/app9091760
Chicago/Turabian StyleHan, Rong, Ming Wu, Chen Gong, Shangshuai Jia, Tieli Han, Hongling Sun, and Jun Yang. 2019. "Combination of Robust Algorithm and Head-Tracking for a Feedforward Active Headrest" Applied Sciences 9, no. 9: 1760. https://doi.org/10.3390/app9091760
APA StyleHan, R., Wu, M., Gong, C., Jia, S., Han, T., Sun, H., & Yang, J. (2019). Combination of Robust Algorithm and Head-Tracking for a Feedforward Active Headrest. Applied Sciences, 9(9), 1760. https://doi.org/10.3390/app9091760