Grid Deformation Real-Time Measurement System of Ion Thruster Based on Videometrics


Abstract
:Featured Application
Abstract
1. Introduction
2. Real-Time Measurement System
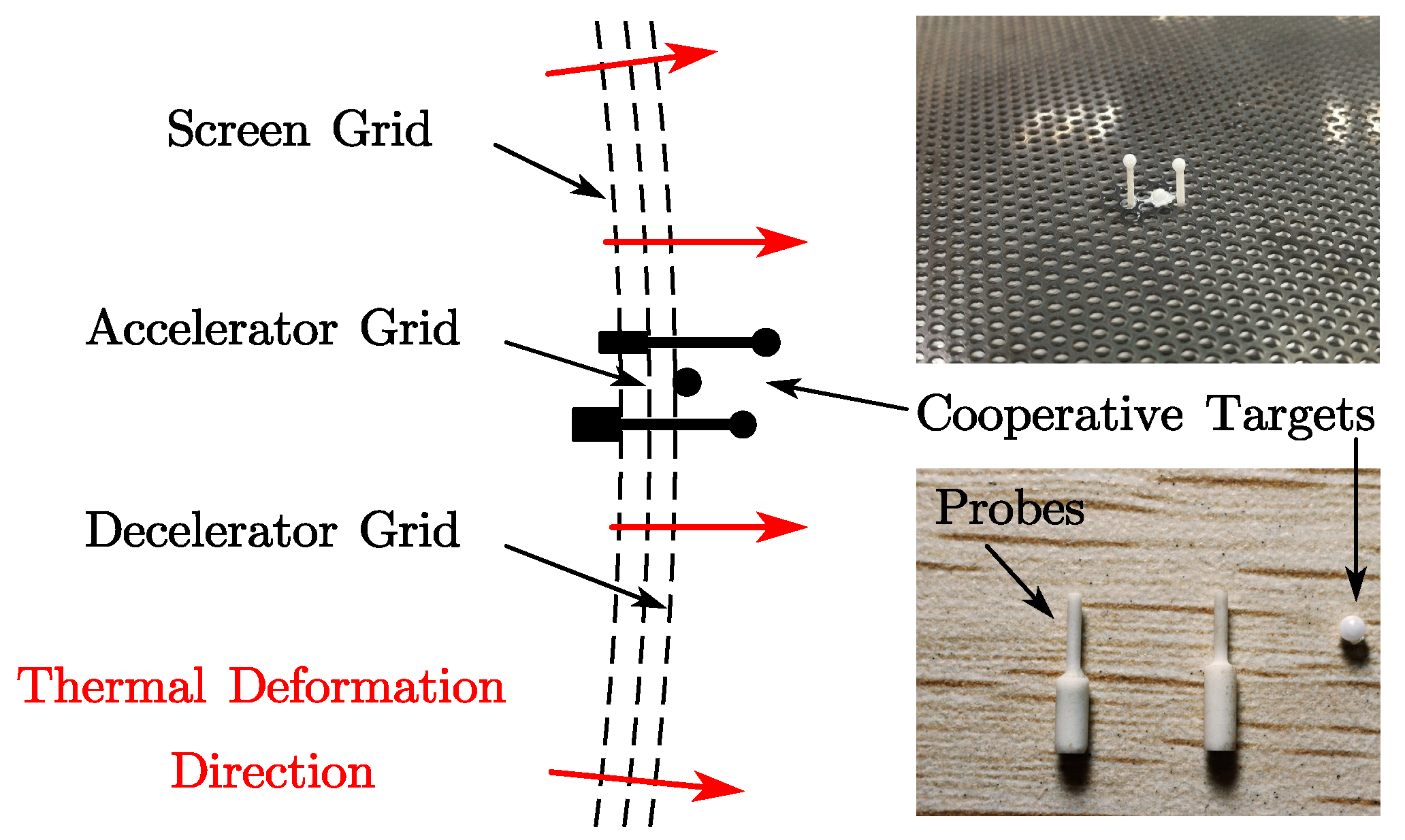
2.1. Measurement Technique
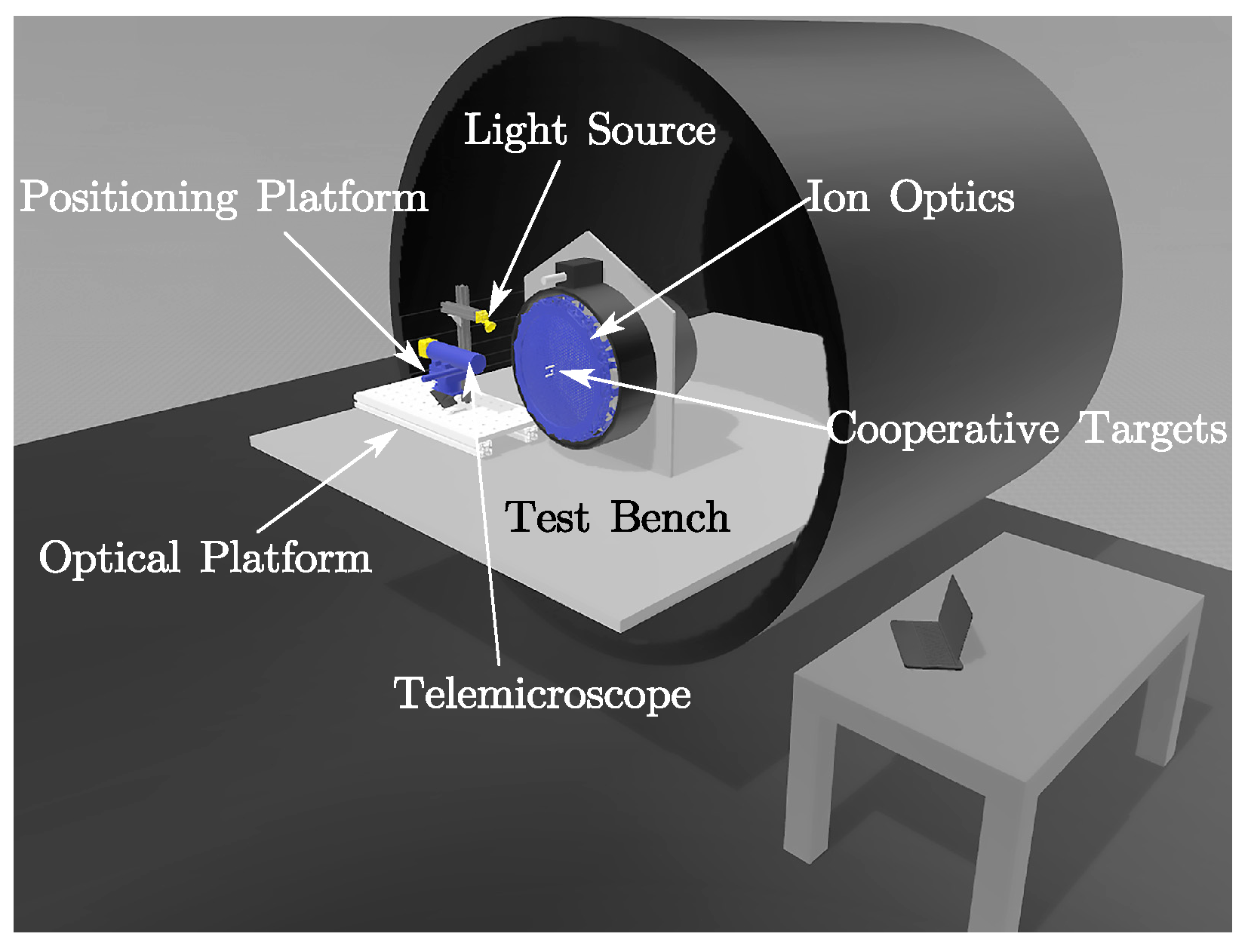
2.2. Hardware Composition
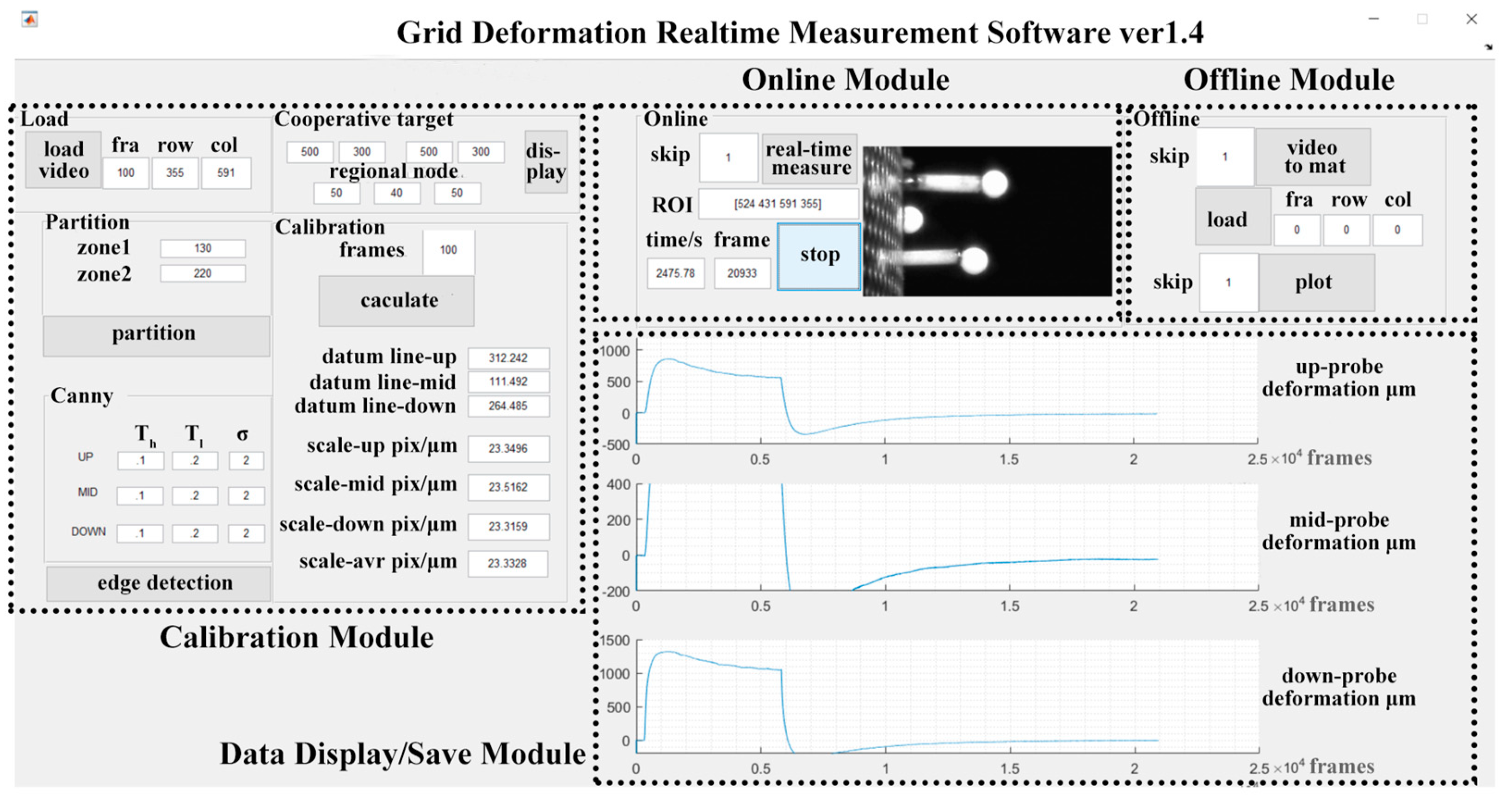
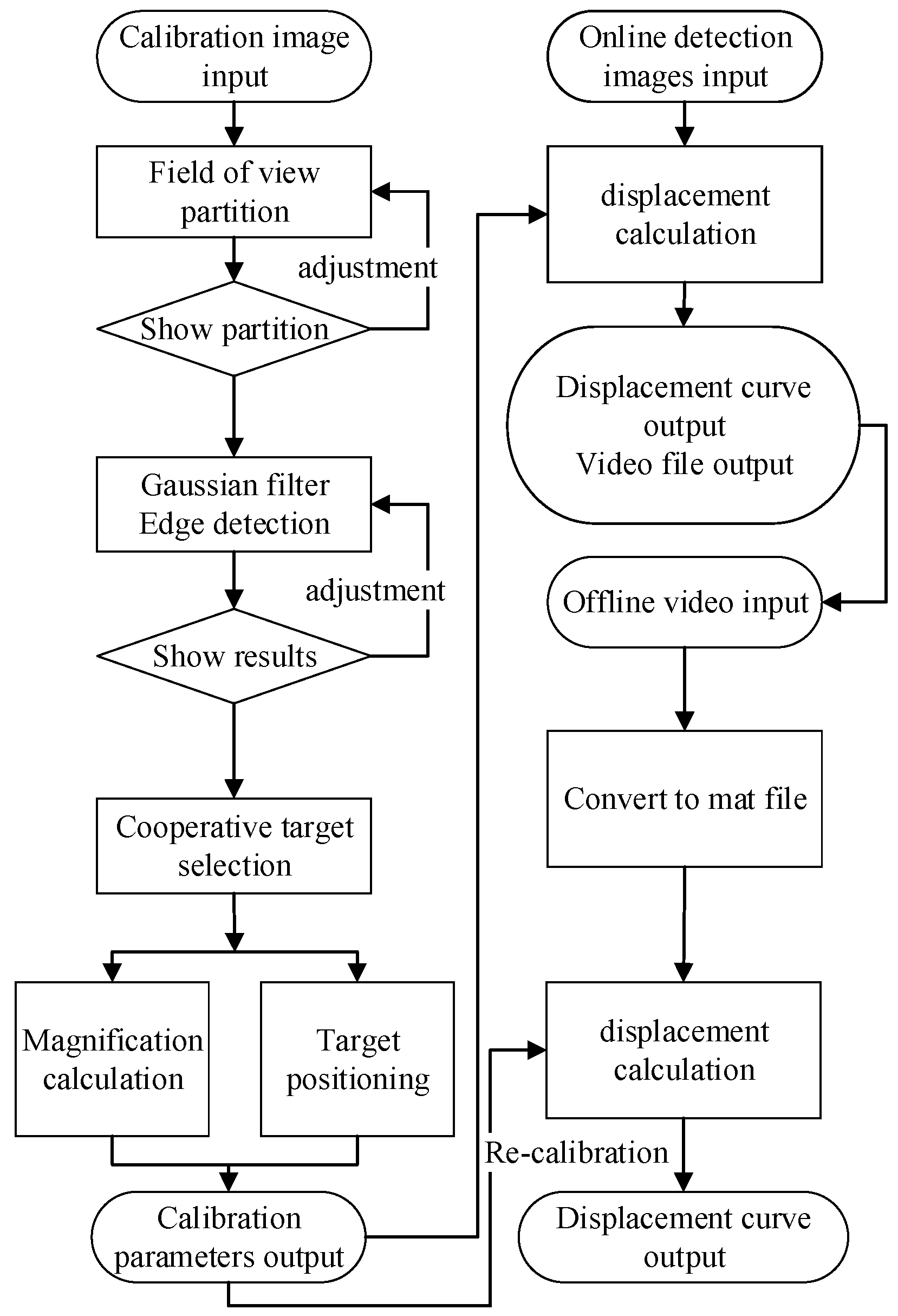
2.3. Software and Test Procedure
3. Algorithm
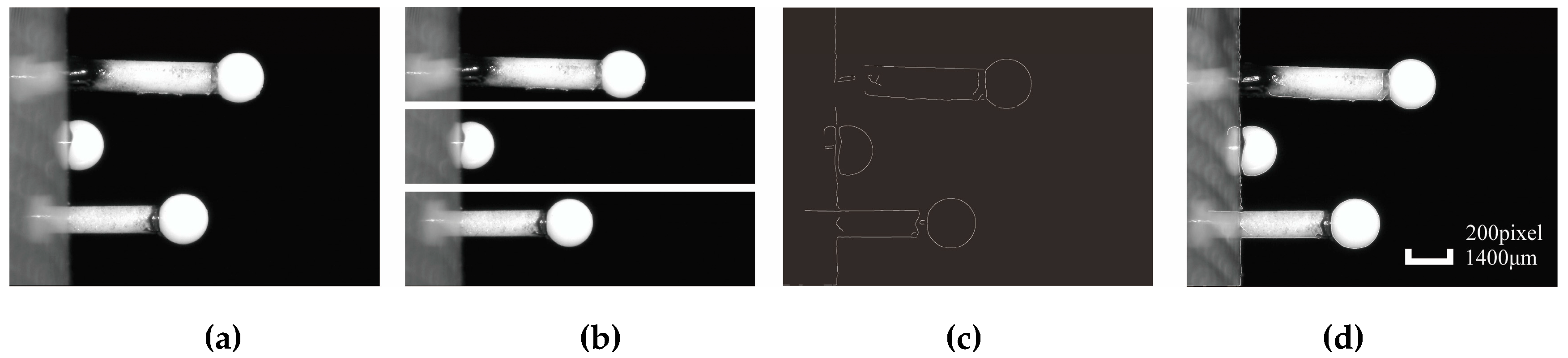
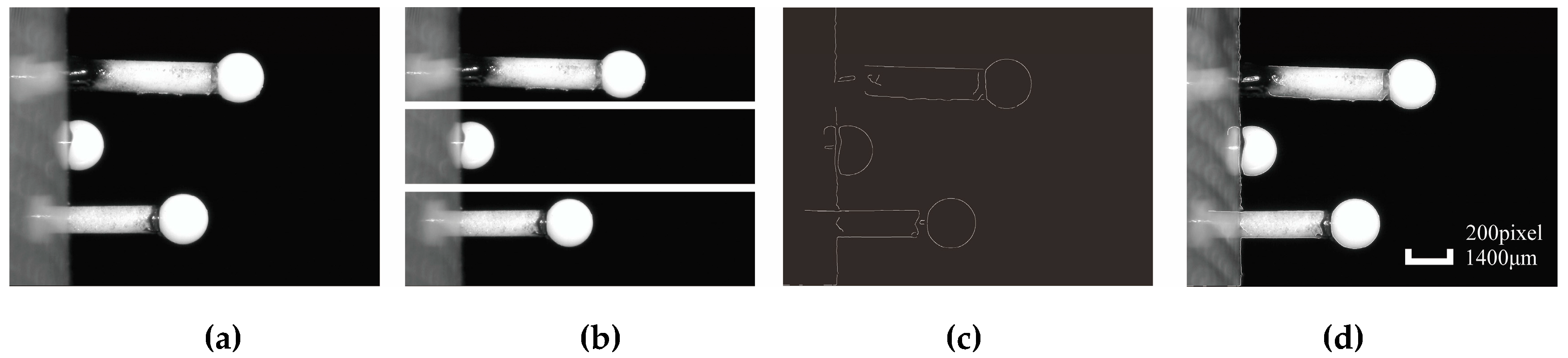
3.1. Image Preprocessing
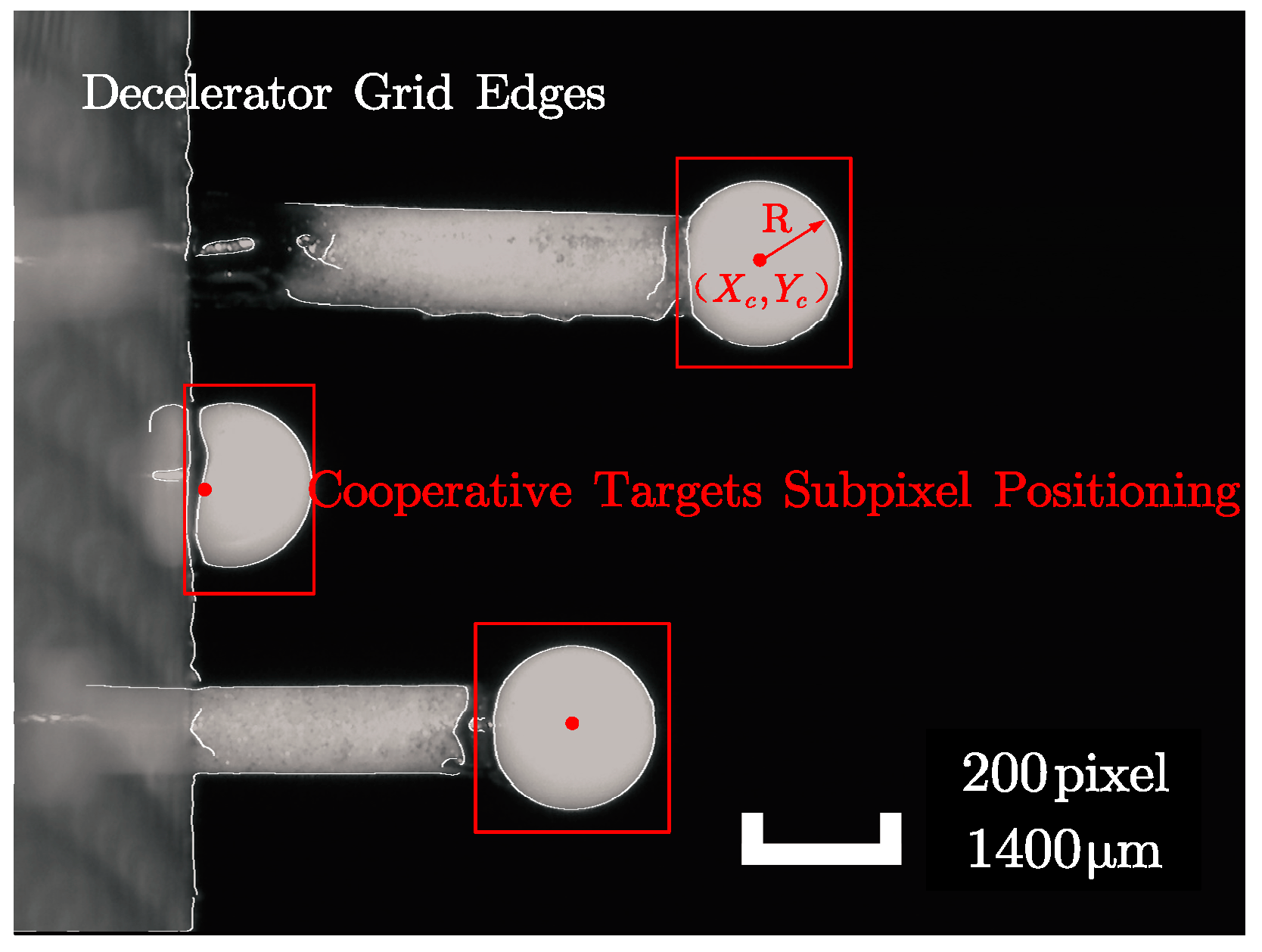
3.2. Targets Positioning and Calibration of Magnification Factor
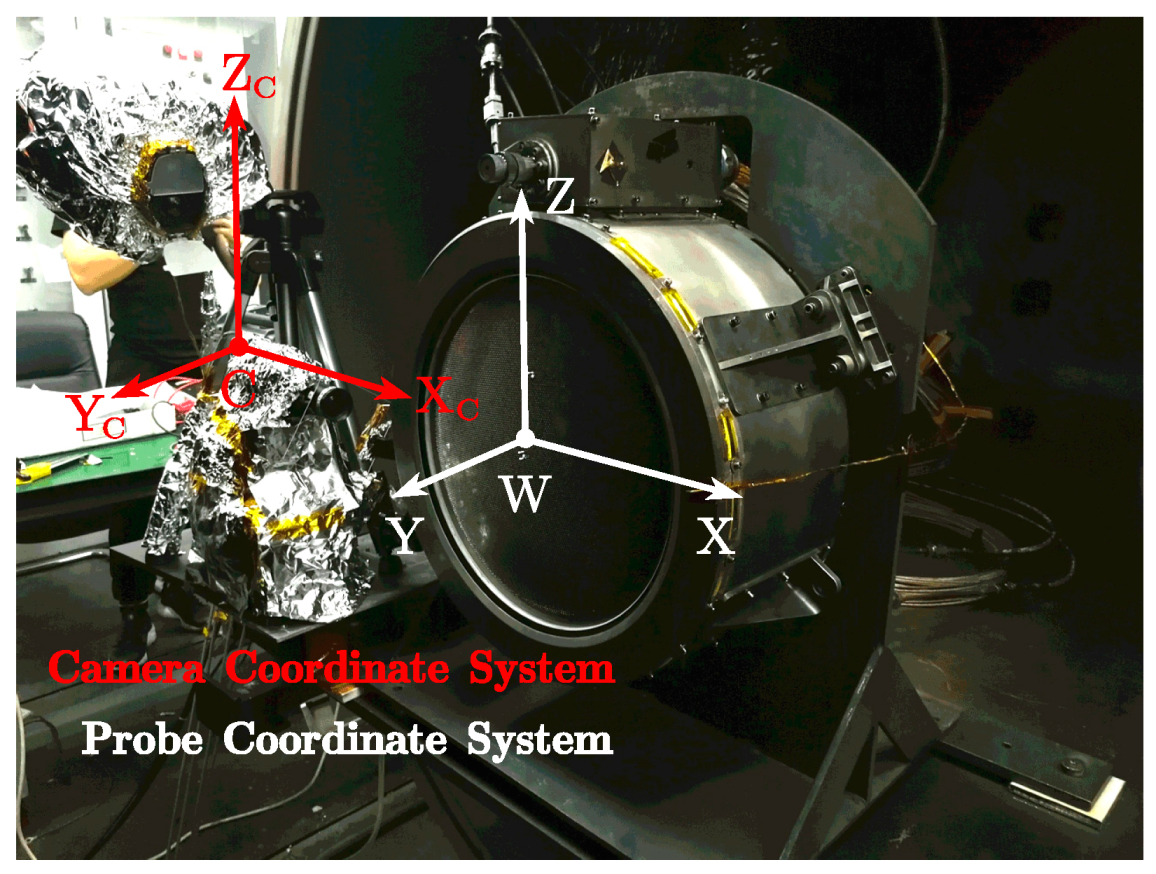
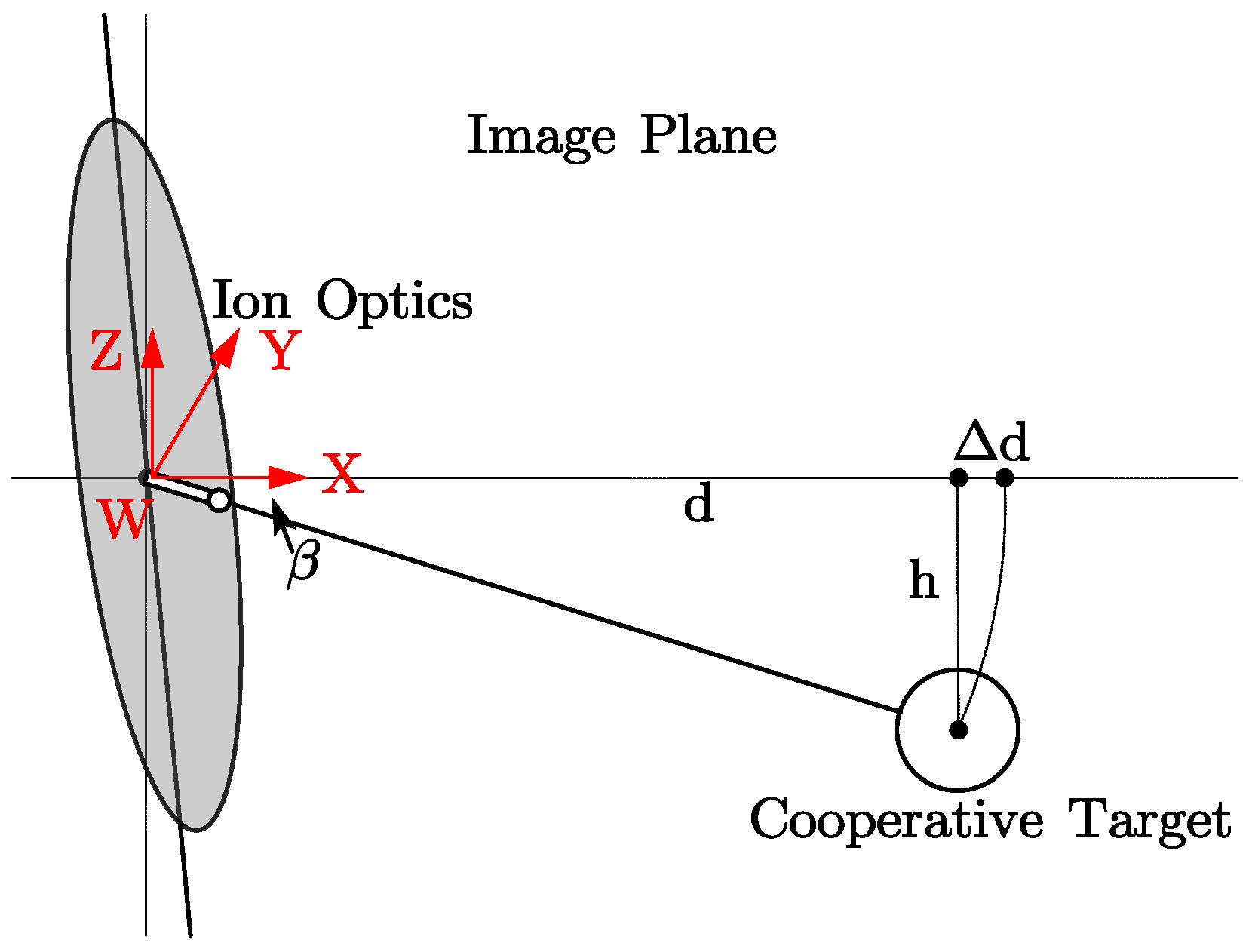
3.3. Calibration of Rotation Angle in the Coordinate System
4. Experiment
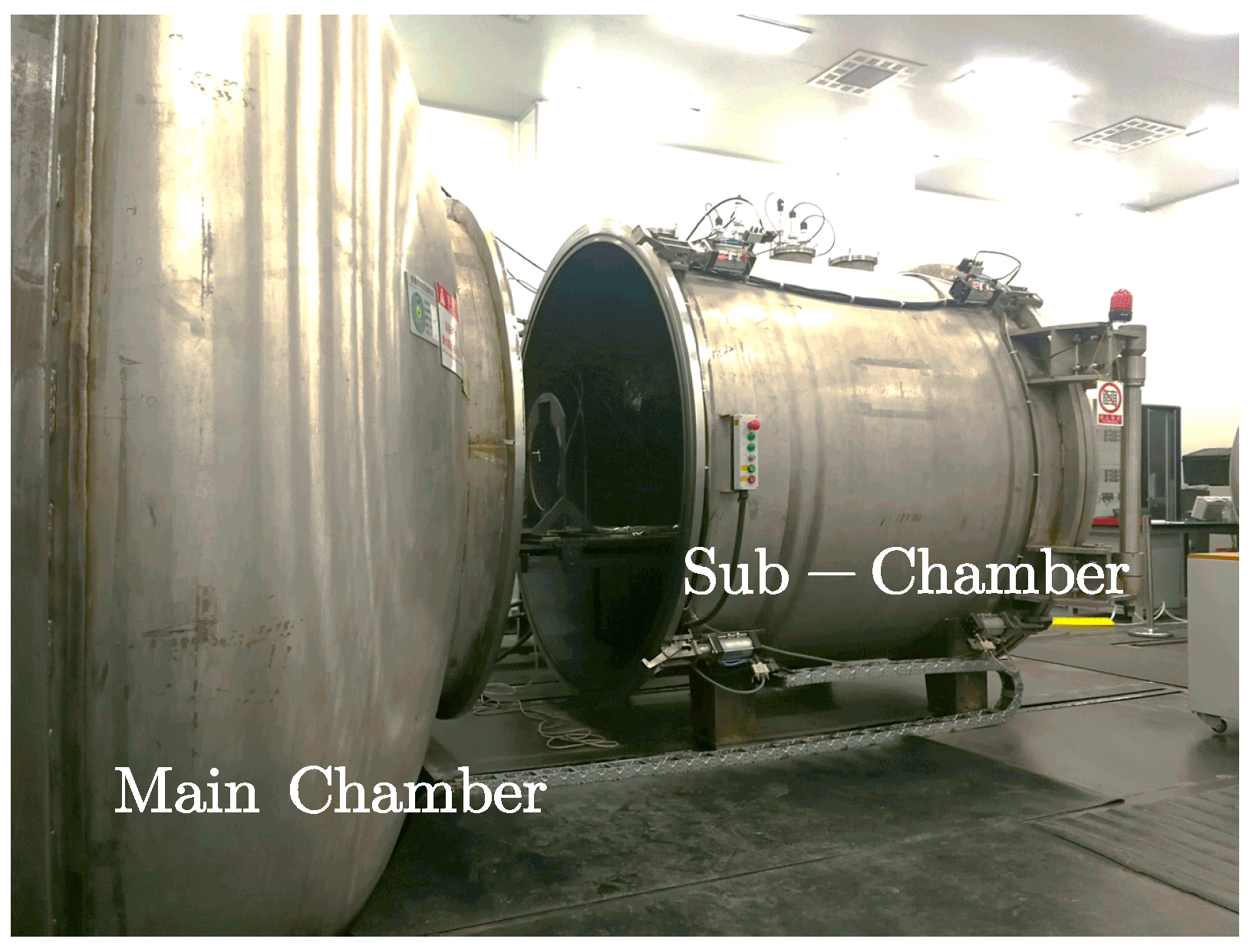
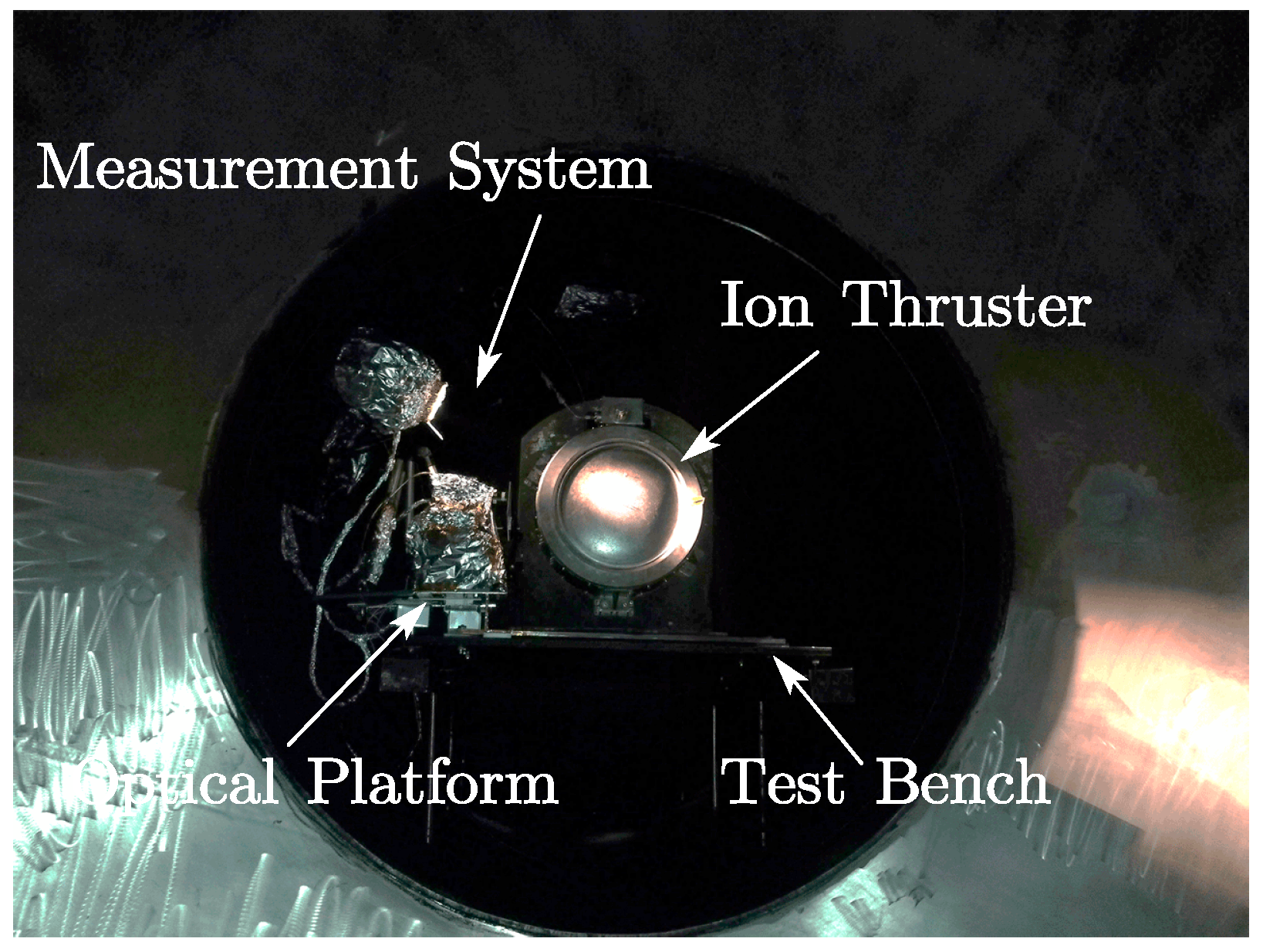
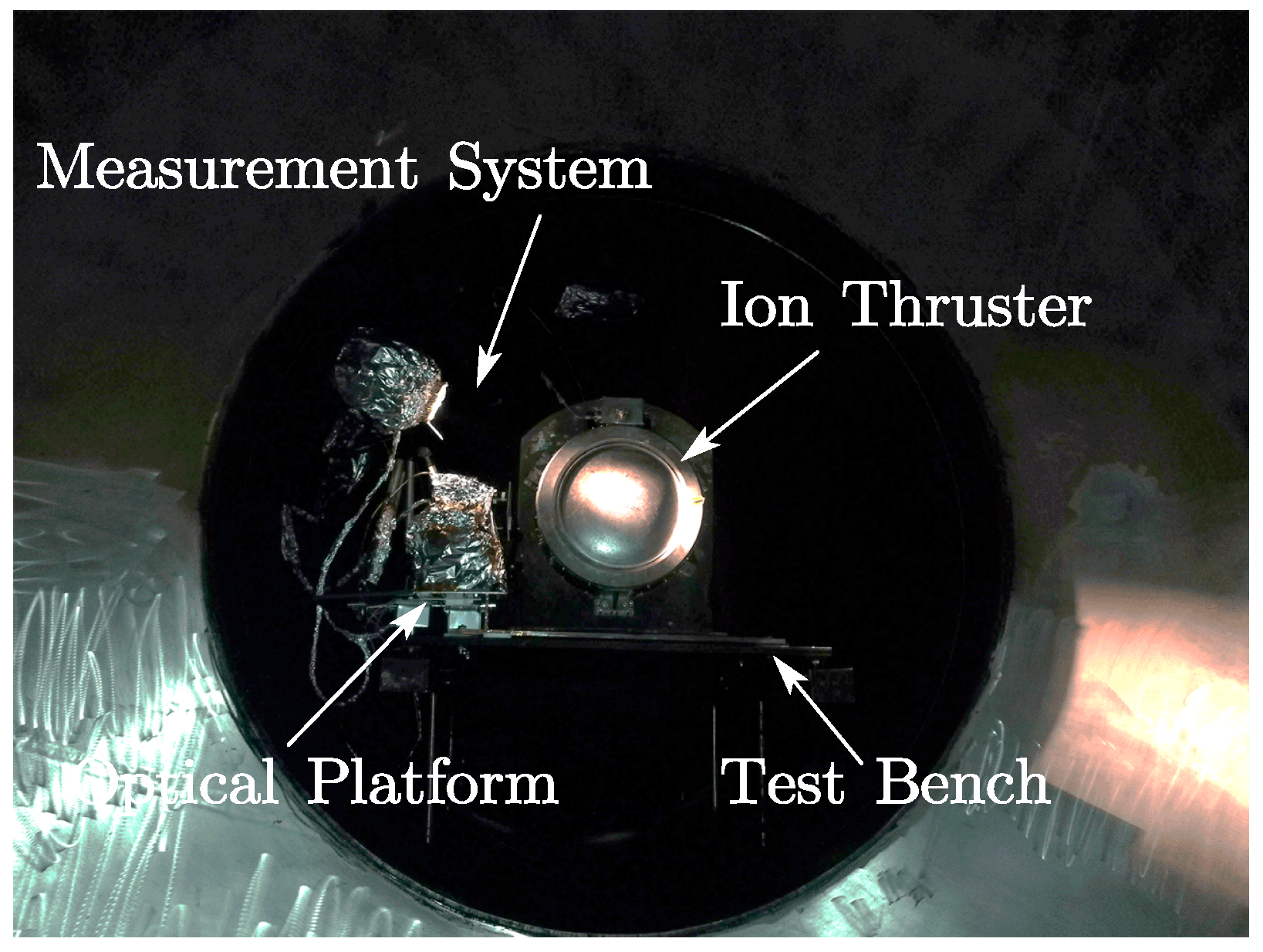
4.1. Equipment Installation and Running Conditions
4.2. VA-1 Experiment Results
4.3. VA-2 Experiment Results
5. Discussion
5.1. Analysis of Factors That Affect Accuracy
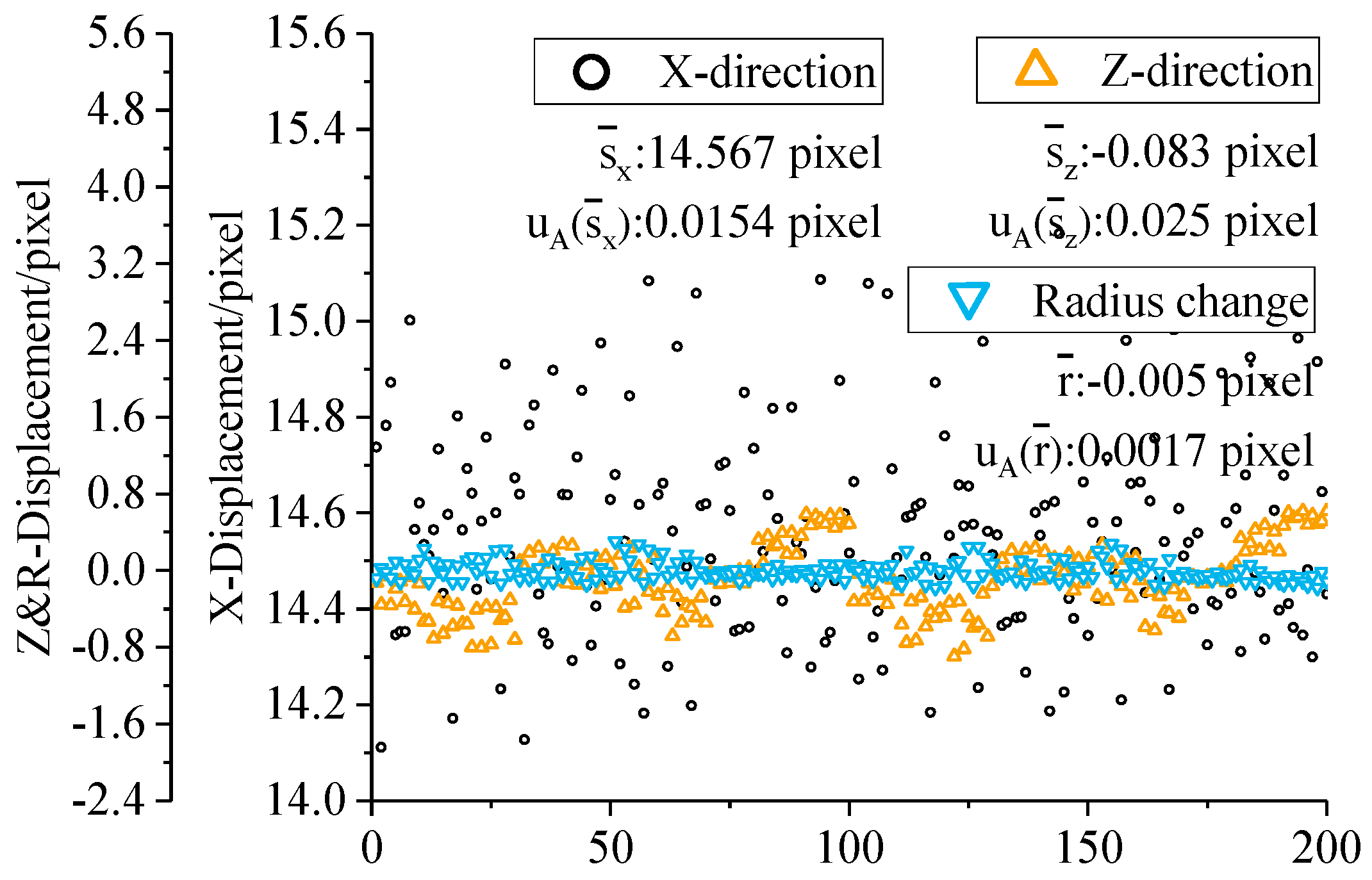
5.2. Accuracy Assessment of System
5.3. Grids Deformation Characteristics
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- SUN, M.; Jia, Y.; Huang, Y.; Yang, J.; Wen, X.; Wang, M. Study on the influence of three-grid assembly thermal deformation on breakdown times and an ion extraction process. Plasma Sci. Technol. 2018, 20, 65509. [Google Scholar] [CrossRef]
- Soulas, G.C. Calculation of Thermally-Induced Displacements in Spherically Domed Ion Engine Grids. In Proceedings of the 29th International Electric Propulsion Conference, Cleveland, OH, USA, 31 October–4 November 2005. [Google Scholar]
- Kaufman, H.R. Technology of Electron-Bombardment Ion Thrusters. Adv. Electron. Electron Phys. 1975, 36, 265–373. [Google Scholar]
- Rawlins, V.K.; Banks, B.A.; Byers, D.C. Design, fabrication, and operation of dished accelerator grids on a 30-cm ion thruster. In Proceedings of the 9th Electric Propulsion Conference, Cleveland, OH, USA, 17–19 April 1972. [Google Scholar] [CrossRef]
- Wirz, R.; Katz, I.; Goebel, D.; Anderson, J. Electron Backstreaming Determination for Ion Thrusters. In Proceedings of the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, Hartford, CT, USA, 21–23 July 2008; pp. 206–210. [Google Scholar]
- Chen, M.; Xia, G.; Xu, Z.; Mao, G. Analysis on the effects of optics thermal deformation on the ion thruster operation. Acta Phys. Sin. 2015, 9, 283–289. (In Chinese) [Google Scholar]
- Farnell, C.C. Performance and lifetime simulation of ion thruster optics. Ph.D. Thesis, Colorado State University, Fort Collins, CO, USA, 2007. [Google Scholar]
- Van Noord, J.L. Lifetime Assessment of the NEXT Ion Thruster. In Proceedings of the 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Cincinnati, OH, USA, 8–11 July 2007. [Google Scholar]
- Soulas, G.C.; Shastry, R. Post-test Inspection of NASA’s Evolutionary Xenon Thruster long duration test hardware: ion optics. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- MacRae, G.S.; Zavesky, R.J.; Gooder, S.T. Structural and thermal response of 30 cm diameter ion thruster optics. In Proceedings of the 25th Joint Propulsion Conference, Monterey, CA, USA, 12–16 July 1989. [Google Scholar]
- Pollard, J.; Welle, R. Thrust vector measurements with the T5 ion engine. In Proceedings of the 31st Joint Propulsion Conference and Exhibit, San Diego, CA, USA, 10–12 July 1995. [Google Scholar]
- Trava-Airoldi, V.J.; Garner, C.; Pivirotto, T.; Brophya, J. An optical technique to measure ion engine grid distortion due to differential thermal expansion. In Proceedings of the 21st International Electric Propulsion Conference, Orlando, FL, USA, 18–20 July 1990. [Google Scholar]
- Soulas, G.C.; Frandina, M.M. Ion Engine Grid Gap Measurements. In Proceedings of the 40th Joint Propulsion Conference and Exhibit, Fort Lauderdale, FL, USA, 11–14 July 2004. [Google Scholar]
- Diaz, E.M.; Soulas, G.C. Grid Gap Measurement for an NSTAR Ion Thruster. In Proceedings of the 29th International Electric Propulsion Conference, Cleveland, OH, USA, 31 October–4 November 2005. [Google Scholar]
- Bundesmann, C.; Tartz, M.; Scholze, F.; Neumann, H.; Leiter, H.J.; Scortecci, F. In Situ Thermal Characterization of the Accelerator Grid of an Ion Thruster. J. Propul. Power 2011, 7, 532–537. [Google Scholar] [CrossRef]
- Bundesmann, C.; Eichhorn, C.; Scholze, F.; Spemann, D.; Neumann, H.; Pagano, D.; Scaranzin, S.; Scortecci, F.; Leiter, H.J.; Gaute, S.; et al. An advanced electric propulsion diagnostic (AEPD) platform for in-situ characterization of electric propulsion thrusters and ion beam sources. Eur. Phys. J. D 2016, 70, 1–11. [Google Scholar] [CrossRef]
- Misuri, T.; Vrebosch, T.; Pieri, L.; Andrenucci, M.; Tordi, M.; Marcuzzi, E.; Bartolozzi, M.; Renzetti, S.; Del Amo, J.G. Telemicroscopy and Thermography Diagnostic Systems for Monitoring Hall Effect Thrusters. In Proceedings of the 32nd International Electric Propulsion Conference, Wiesbaden, Germany, 11–15 September 2011. [Google Scholar]
- Misuri, T.; Andrenucci, M.; Vrebosch, T.; Tordi, M.; Marcuzzi, E.; Bartolozzi, M.; del Amo, J.G. Advanced Erosion Diagnostics for Hall Effect Thrusters and Gridded Ion Engines. In Proceedings of the 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, San Diego, CA, USA, 31 July–3 August 2011. [Google Scholar]
- Sun, M.; Wang, L.; Yang, J.; Wen, X.; Huang, Y.; Wang, M. Study of the key factors affecting the triple grid lifetime of the LIPS-300 ion thruster. Plasma Sci. Technol. 2018, 20, 45504. [Google Scholar] [CrossRef]
- Yu, Q.; Shang, Y. Videometrics: Principles and Researches; Science Press: Beijing, China, 2009; ISBN 978-7-03-024189-4. (In Chinese) [Google Scholar]
- Yu, Q.; Lu, H. Image Based Precise Measurement and Motion Measurement; Science Press: Beijing, China, 2002. (In Chinese) [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Zhang, T.; Tian, H.; Chen, J. A Study of LIPS-200 Ion Thruster Life Test on Ground. Spacecraft Eng. 2012, 4, 111–116. (In Chinese) [Google Scholar]
- Zhang, T.; Chen, J.; Li, X.; Chen, J. Calculation of backsputter depositon on LIPS-200 ion thruster in the life test. Spacecraft Environ. Eng. 2011, 5, 436–439. (In Chinese) [Google Scholar]
- Zhao, Y.; Zhang, T.; Huang, Y.; Sun, X.; Sun, Y.; Li, J.; Yang, F.; Chi, X. Experimental Study of 40cm Ion Thruster over a Wide Range of Input Power. J. Propul. Technol. 2018, 39, 942–947. (In Chinese) [Google Scholar]
- Liang, D. Research on On-line Videometrics Measurement System for Thermal Deformation of Ion Thruster Optics. Master’s Thesis, National University of Defense Technology, Changsha, China, December 2018. [Google Scholar]
- Rawlins, V.K.; Banks, B.A.; Byers, D.C. Dished Accelerator Grids on a 30-cm Ion Thruster. J. Spacecraft Rockets 1973, 10, 29–35. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Running Conditions | No. | Memo | ||
|---|---|---|---|---|
| Discharge chamber pretreatment | VA-1 | 750 W | 0 W | Running for 1 h, cool down |
| Ion optics pretreatment level 1 | VA-2 | 80 W | 250 W | Running for 0.5 h, increase power |
| Ion optics pretreatment level 2 | 150 W | 480 W | Running for 0.5 h, increase power | |
| Ion optics pretreatment level 3 | 185 W | 640 W | Running for 0.5 h, increase power | |
| Ion optics pretreatment level 4 | 200 W | 1080 W | Running for 0.5 h, increase power |
| No. | Time (min) | Deformation (mm) | Memo | ||||
|---|---|---|---|---|---|---|---|
| Decelerator Grid | Accelerator Grid | Screen Grid | Gap S-A | Gap A-D | |||
| VA-1 | 0 | 0.02 | 0.02 | 0.02 | 0 | 0 | Start |
| 5.3 | 0.25 | 0.68 | 1.09 | − 0.41 | − 0.43 | Gap min | |
| 7.3 | 0.27 | 0.70 | 1.12 | − 0.42 | − 0.43 | Deformation max | |
| 37.5 | 0.09 | 0.47 | 0.88 | − 0.41 | − 0.38 | Stop | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, J.; Dai, P.; Liang, D.; Zhou, S.; Xiao, S.; Liang, X. Grid Deformation Real-Time Measurement System of Ion Thruster Based on Videometrics. Appl. Sci. 2019, 9, 1759. https://doi.org/10.3390/app9091759
Yuan J, Dai P, Liang D, Zhou S, Xiao S, Liang X. Grid Deformation Real-Time Measurement System of Ion Thruster Based on Videometrics. Applied Sciences. 2019; 9(9):1759. https://doi.org/10.3390/app9091759
Chicago/Turabian StyleYuan, Jiehong, Peng Dai, Dong Liang, Shiming Zhou, Shijie Xiao, and Xiuqiang Liang. 2019. "Grid Deformation Real-Time Measurement System of Ion Thruster Based on Videometrics" Applied Sciences 9, no. 9: 1759. https://doi.org/10.3390/app9091759