Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator



Abstract
:Featured Application
Abstract
1. Introduction
2. Problem Formulations
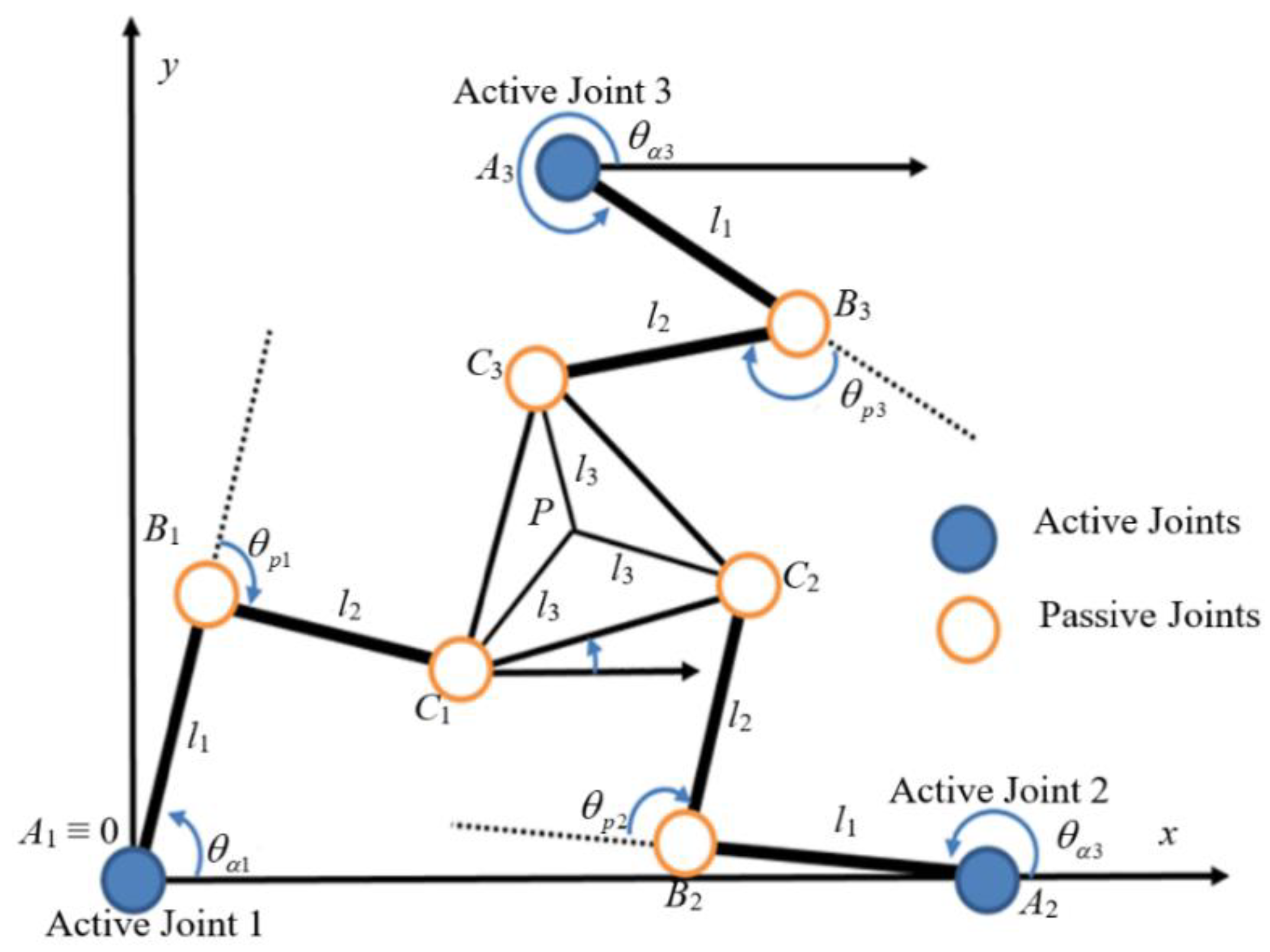
2.1. Dynamic Model of Parallel Robot Manipulator
2.2. Definition of Synchronization Error Cross-Coupling Error
3. Design Procedure of Control Scheme
3.1. Design of S-FOTSMS
3.2. Design of S-FOTSMC
4. Numerical Simulation Studies
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Design of the SMC
Appendix B
Design of the S-SMC
Appendix C
Design Nonsingular Fast Terminal Sliding Mode Control
References
- Merlet, J.-P. Parallel Robots; Springer Science & Business Media: Berlin, Germany, 2006; Volume 128. [Google Scholar]
- Yang, C.; Han, J.; Peter, O.O.; Huang, Q. PID control with gravity compensation for hydraulic 6-DOF parallel manipulator. In PID Control, Implementation Tuning; TechOpen: Rijeka, Croatia, 2011. [Google Scholar]
- Su, Y.X.; Sun, D.; Ren, L.; Wang, X.; Mills, J.K. Nonlinear PD synchronized control for parallel manipulators. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 1374–1379. [Google Scholar]
- Ouyang, P.R.; Zhang, W.J.; Gupta, M.M. An adaptive switching learning control method for trajectory tracking of robot manipulators. Mechatronics 2006, 16, 51–61. [Google Scholar] [CrossRef]
- Su, Y.; Sun, D.; Ren, L.; Mills, J.K. Integration of saturated PI synchronous control and PD feedback for control of parallel manipulators. IEEE Trans. Robot. 2006, 22, 202–207. [Google Scholar]
- Yang, Z.; Wu, J.; Mei, J. Motor-mechanism dynamic model based neural network optimized computed torque control of a high speed parallel manipulator. Mechatronics 2007, 17, 381–390. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J.; Suh, Y.-S.; Ro, Y.-S. An online self-gain tuning method using neural networks for nonlinear PD computed torque controller of a 2-dof parallel manipulator. Neurocomputing 2013, 116, 53–61. [Google Scholar] [CrossRef]
- Shang, W.; Cong, S. Nonlinear computed torque control for a high-speed planar parallel manipulator. Mechatronics 2009, 19, 987–992. [Google Scholar] [CrossRef]
- Zhu, X.; Tao, G.; Yao, B.; Cao, J. Adaptive robust posture control of parallel manipulator driven by pneumatic muscles with redundancy. IEEE/ASME Trans. Mechatron. 2008, 13, 441–450. [Google Scholar]
- Ryu, J.-H.; Song, J.; Kwon, D.-S. A nonlinear friction compensation method using adaptive control and its practical application to an in-parallel actuated 6-DOF manipulator. Control Eng. Pract. 2001, 9, 159–167. [Google Scholar] [CrossRef]
- Zhu, X.; Tao, G.; Yao, B.; Cao, J. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles. Automatica 2008, 44, 2248–2257. [Google Scholar] [CrossRef]
- Honegger, M.; Brega, R.; Schweiter, G. Application of a nonlinear adaptive controller to a 6 dof parallel manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’00), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1930–1935. [Google Scholar]
- Abdellatif, H.; Heimann, B. Advanced model-based control of a 6-DOF hexapod robot: A case study. IEEE/ASME Trans. Mechatron. 2010, 15, 269–279. [Google Scholar] [CrossRef]
- Moreno, J.A.; Negrete, D.Y.; Torres-González, V.; Fridman, L. Adaptive continuous twisting algorithm. Int. J. Control 2016, 89, 1798–1806. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J.; Le, T.D. An Adaptive Fuzzy Terminal Sliding Mode Control Methodology for Uncertain Nonlinear Second-Order Systems. In Proceedings of the International Conference on Intelligent Computing, Bengaluru, India, 25–27 October 2018; pp. 123–135. [Google Scholar]
- Qi, Z.; McInroy, J.E.; Jafari, F. Trajectory tracking with parallel robots using low chattering, fuzzy sliding mode controller. J. Intell. Robot. Syst. 2007, 48, 333–356. [Google Scholar] [CrossRef]
- Guo, H.; Liu, Y.; Liu, G.; Li, H. Cascade control of a hydraulically driven 6-DOF parallel robot manipulator based on a sliding mode. Control Eng. Pract. 2008, 16, 1055–1068. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.-J. An Adaptive Neural Non-Singular Fast-Terminal Sliding-Mode Control for Industrial Robotic Manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef]
- Yang, J.; Li, S.; Yu, X. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer. IEEE Trans. Ind. Electron. 2013, 60, 160–169. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Zhang, M.; Ma, X.; Song, R.; Rong, X.; Tian, G.; Tian, X.; Li, Y. Adaptive proportional-derivative sliding mode control law with improved transient performance for underactuated overhead crane systems. IEEE/CAA J. Autom. Sin. 2018, 5, 683–690. [Google Scholar] [CrossRef]
- Utkin, V. Discussion aspects of high-order sliding mode control. IEEE Trans. Autom. Control 2016, 61, 829–833. [Google Scholar] [CrossRef]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2011, 58, 2444–2453. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Dong, J.; Jiang, L. Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers. Appl. Energy 2018, 210, 711–723. [Google Scholar] [CrossRef]
- Kamal, S.; Moreno, J.A.; Chalanga, A.; Bandyopadhyay, B.; Fridman, L.M. Continuous terminal sliding-mode controller. Automatica 2016. [Google Scholar] [CrossRef]
- Koren, Y. Cross-coupled biaxial computer control for manufacturing systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, Q.; Yang, L. Design of robust sliding mode control with disturbance observer for multi-axis coordinated traveling system. Comput. Math. Appl. 2012, 64, 759–765. [Google Scholar] [CrossRef]
- Cheng, M.H.; Li, Y.J.; Bakhoum, E.G. Controller synthesis of tracking and synchronization for multiaxis motion system. IEEE Trans. Control Syst. Technol. 2014, 22, 378–386. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Experimental comparison of control approaches on trajectory tracking control of a 3-DOF parallel robot. IEEE Trans. Control Syst. Technol. 2007, 15, 982–988. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Adaptive synchronized control for a planar parallel manipulator: Theory and experiments. J. Dyn. Syst. Meas. Control 2006, 128, 976–979. [Google Scholar] [CrossRef]
- Ren, L.; Mills, J.K.; Sun, D. Trajectory tracking control for a 3-DOF planar parallel manipulator using the convex synchronized control method. IEEE Trans. Control Syst. Technol. 2008, 16, 613–623. [Google Scholar] [CrossRef]
- Sun, D.; Lu, R.; Mills, J.K.; Wang, C. Synchronous tracking control of parallel manipulators using cross-coupling approach. Int. J. Robot. Res. 2006, 25, 1137–1147. [Google Scholar] [CrossRef]
- Tuan, V.A.; Kang, H.-J. A New Finite-time Control Solution to The Robotic Manipulators Based on The Nonsingular Fast Terminal Sliding Variables and Adaptive Super-Twisting Scheme. J. Comput. Nonlinear Dyn. 2019, 14, 031002. [Google Scholar] [CrossRef]
- Zhang, F. High-speed nonsingular terminal switched sliding mode control of robot manipulators. IEEE/CAA J. Autom. Sin. 2017, 4, 775–781. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H. An Adaptive Terminal Sliding Mode Control for Robot Manipulators with Non-singular Terminal Sliding Surface Variables. IEEE Access 2018, 8701–8712. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H. A Chattering-Free, Adaptive, Robust Tracking Control Scheme for Nonlinear Systems with Uncertain Dynamics. IEEE Access 2019, 10457–10466. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. Finite time position synchronised control for parallel manipulators using fast terminal sliding mode. Int. J. Syst. Sci. 2009, 40, 829–843. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F.; Zhu, Q. Robust adaptive terminal sliding mode-based synchronised position control for multiple motion axes systems. IET Control Theory Appl. 2009, 3, 136–150. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite time fault tolerant control for robot manipulators using time delay estimation and continuous nonsingular fast terminal sliding mode control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef] [PubMed]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An Adaptive Backstepping Nonsingular Fast Terminal Sliding Mode Control for Robust Fault Tolerant Control of Robot Manipulators. IEEE Trans. Syst., Man Cybern. Syst. 2018, 99, 1–11. [Google Scholar] [CrossRef]
- Edelbaher, G.; Jezernik, K.; Urlep, E. Low-speed sensorless control of induction machine. IEEE Trans. Ind. Electron. 2006, 53, 120–129. [Google Scholar] [CrossRef]
- Li, H.; Dou, L.; Su, Z. Adaptive nonsingular fast terminal sliding mode control for electromechanical actuator. Int. J. Syst. Sci. 2013, 44, 401–415. [Google Scholar] [CrossRef]
- Van, M.; Franciosa, P.; Ceglarek, D. Fault diagnosis and fault-tolerant control of uncertain robot manipulators using high-order sliding mode. Math. Probl. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Robust fault-tolerant control for a class of second-order nonlinear systems using an adaptive third-order sliding mode control. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 221–228. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Rubio-Astorga, G.; Sánchez-Torres, J.D.; Cañedo, J.; Loukianov, A.G. High-order sliding mode block control of single-phase induction motor. IEEE Trans. Control Syst. Technol. 2014, 22, 1828–1836. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, M.; Zheng, X.; Han, F.; Yu, X. Full-order terminal sliding-mode control of MIMO systems with unmatched uncertainties. J. Frankl. Inst. 2018, 355, 653–674. [Google Scholar] [CrossRef]
- Song, Z.; Duan, C.; Wang, J.; Wu, Q. Chattering-free full-order recursive sliding mode control for finite-time attitude synchronization of rigid spacecraft. J. Frankl. Inst. 2019, 356, 998–1020. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C.; Su, H.; Zhang, Q. On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Trans. 2017, 71, 196–205. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Wang, J.; Wu, L.; Lam, H.-K.; Gao, Y. Optimal Guaranteed Cost Sliding-Mode Control of Interval Type-2 Fuzzy Time-Delay Systems. IEEE Trans. Fuzzy Syst. 2018, 26, 246–257. [Google Scholar] [CrossRef]
- Roopaei, M.; Jahromi, M.Z. Chattering-free fuzzy sliding mode control in MIMO uncertain systems. Nonlinear Anal. Theory Methods Appl. 2009, 71, 4430–4437. [Google Scholar] [CrossRef]
- Van, M. An Enhanced Robust Fault Tolerant Control Based on an Adaptive Fuzzy PID-Nonsingular Fast Terminal Sliding Mode Control for Uncertain Nonlinear Systems. IEEE/ASME Trans. Mechatron. 2018, 23, 1362–1371. [Google Scholar] [CrossRef]
- Duc, T.M.; Van Hoa, N.; Dao, T.-P. Adaptive fuzzy fractional-order nonsingular terminal sliding mode control for a class of second-order nonlinear systems. J. Comput. Nonlinear Dyn. 2018, 13, 31004. [Google Scholar] [CrossRef]
- Doan, Q.V.; Le, T.D.; Le, Q.D.; Kang, H.-J. A neural network--based synchronized computed torque controller for three degree-of-freedom planar parallel manipulators with uncertainties compensation. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418767307. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J. An adaptive tracking controller for parallel robotic manipulators based on fully tuned radial basic function networks. Neurocomputing 2014, 137, 12–23. [Google Scholar] [CrossRef]
- Sun, D. Synchronization Control of Multiagent Systems; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Bhat, S.P.; Bernstein, D.S. Geometric homogeneity with applications to finite-time stability. Math. Control Signals Syst. 2005, 17, 101–127. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef]
- Polyakov, A.; Fridman, L. Stability notions and Lyapunov functions for sliding mode control systems. J. Frankl. Inst. 2014, 351, 1831–1865. [Google Scholar] [CrossRef]
- Le, T.D.; Kang, H.-J.; Suh, Y.-S. Chattering-free neuro-sliding mode control of 2-DOF planar parallel manipulators. Int. J. Adv. Robot. Syst. 2013, 10, 22. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Le, T.D.; Doan, Q.V. Fuzzy Adaptive Synchronized Sliding Mode Control of Parallel Manipulators. In Proceedings of the 4th International Conference on Mechatronics Robotics Engineering, Valenciennes, France, 7–11 February 2018; pp. 102–107. [Google Scholar]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Parameters | Description | Value | Unit |
|---|---|---|---|
| The lower part length of each leg | 0.4 | m | |
| The upper part length of each leg | 0.6 | m | |
| The dimension of the motion platform | 0.2 | m | |
| Distance from the joint to the mass center of each lower leg | 0.2 | m | |
| Distance from the joint to the mass center of each upper leg | 0.3 | m | |
| Mass of each lower leg | 5.12 | kg | |
| Mass of each upper leg | 7.39 | kg | |
| Mass of the motion platform | 3.84 | kg | |
| Inertia moment of the lower of ith leg | 91 × 10−3 | kg·m2 | |
| Inertia moment of the upper of ith leg | 267 × 10−3 | kg·m2 | |
| Inertia moment of the motion platform | 65 × 10−3 | kg·m2 |
| Control Algorithm | Control Parameters | Control Parameter Values |
|---|---|---|
| SMC | ||
| S-SMC | ||
| NFTSMC | ||
| S-FOTSMC |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doan, Q.V.; Le, T.D.; Vo, A.T. Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Appl. Sci. 2019, 9, 1756. https://doi.org/10.3390/app9091756
Doan QV, Le TD, Vo AT. Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Applied Sciences. 2019; 9(9):1756. https://doi.org/10.3390/app9091756
Chicago/Turabian StyleDoan, Quang Vinh, Tien Dung Le, and Anh Tuan Vo. 2019. "Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator" Applied Sciences 9, no. 9: 1756. https://doi.org/10.3390/app9091756
APA StyleDoan, Q. V., Le, T. D., & Vo, A. T. (2019). Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Applied Sciences, 9(9), 1756. https://doi.org/10.3390/app9091756