In the
transition model, two transport equations with an extra nine model coefficients should be solved additionally based on the SST k-
turbulent model. If a total of nine model coefficients are considered for multiple random inputs, tremendous computational time and cost are required. For example, when the order of the polynomial chaos
p is 2 or 3, the required number of random inputs is 19,683 or 262,144, respectively in the Non-Intrusive Spectral Projection (NISP) method. First, the sensitivity analysis of each model coefficient was conducted with ±10% deviation for the flat plate and the three most effective model coefficients (
Ca2, Ce1, and
Ce2) were obtained for the multiple random inputs. The deviation and distribution of the model coefficients were set based on References [
16,
17,
18].
Table 1 presents the results of the sensitivity analysis which show the difference with the reference value of the deterministic solution. To carry this out, each model coefficient was assumed to have a uniform distribution with the fixed constant from the original model [
21] and ±10% deviation. Then, we applied the UQ technique with the single random input to the target problem. We calculated the variance depending on each random model coefficient and determined the model coefficients that show the largest variance of the quantities of interest. Considering the simulation time and cost, the three top model coefficients c
a2, c
e1, and c
e2 were selected and applied to the NIPC and NISP methods with multiple random inputs. The following
Table 2 shows the probability distributions of the three coefficients.
From the probability distributions of the three coefficients shown in
Table 3, in our calculations, we used multi-dimensional Legendre polynomials, which are orthogonal in the interval for each random dimension. Stochastic solutions to the target problems were obtained using three approaches: Monte Carlo with 500 samples, NIPC, and NISP methods. For NIPC, the oversampling rate
was set to 2, as recommended by Hosder et al. [
16]. The Gaussian quadrature rule was adopted to select the sample points by the specified order,
p + 1 for NISP.
The
transition model introduced by Menter [
21] was applied to two target problems: transitional flow over a flat plate and flow around Aerospatiale A-airfoil [
32,
33,
34]. These are well-known validation problems for validation of CFD algorithms and transition/turbulence models. Experimental data are presented on the site of
turbulence modeling resources by NASA [
34]. The deterministic solutions of two transitional flows were validated by comparison with reference data.
4.1. Transitional Flow over a Flat Plate
The first case was the transitional flow over a flat plate and the deterministic solution of this case was validated using the reference data of Langtry and Menter [
21].
Figure 1 shows the computational mesh for the flat plate and the boundary conditions of the computational domain over the flat plate. The freestream turbulence intensity and eddy viscosity ratio values were set to
and
(Savill 1996) [
33], respectively. A mesh with 43,000 cells was adopted and the mesh was clustered to the wall for
in
Table 4. The corresponding Reynolds number based on the free stream velocity (5.4 m/s) and length of the flat plate (0.3 m) was 1.0 × 10
6.
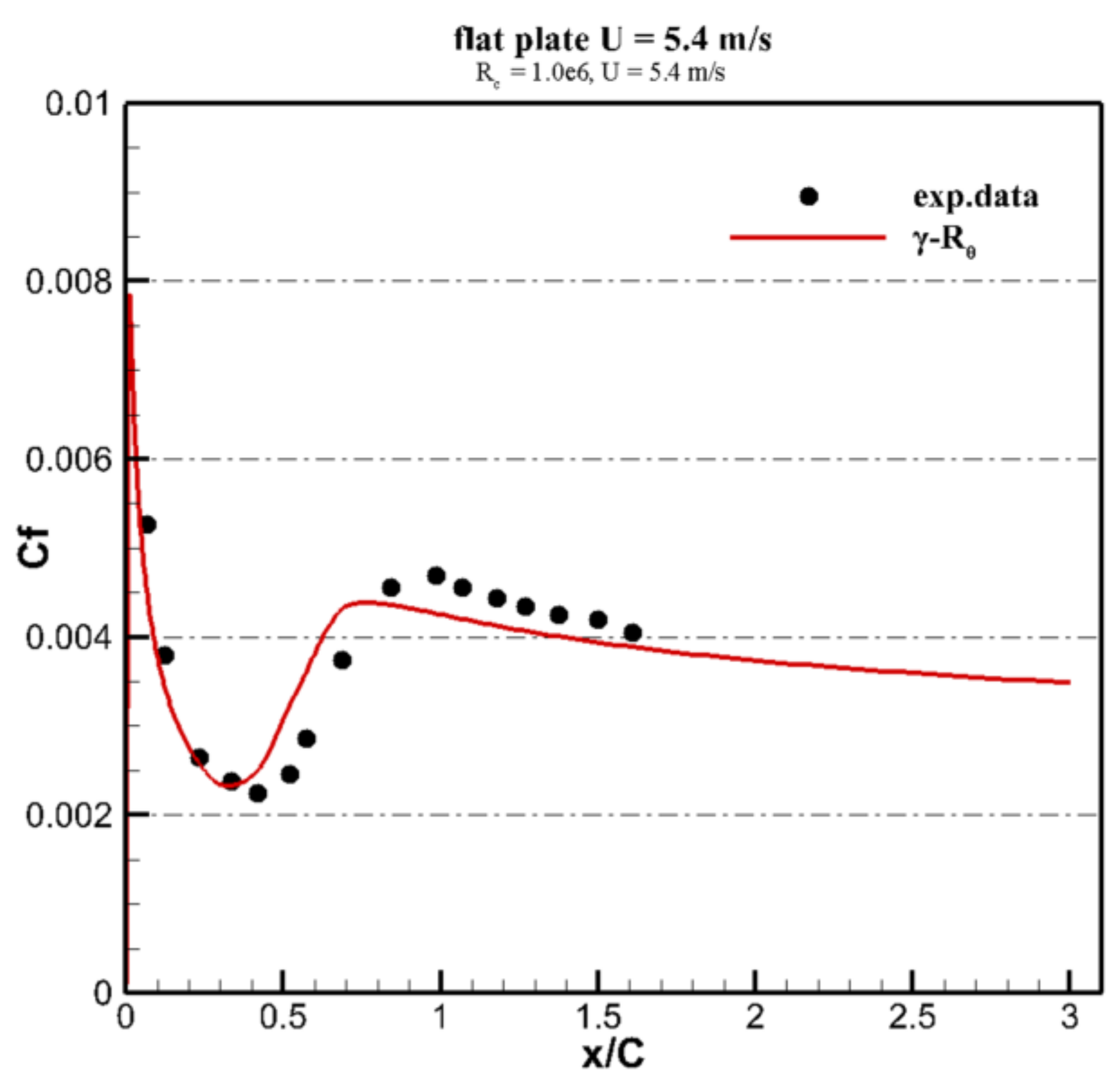
Figure 2 shows the comparison of the skin friction
profiles predicted by the deterministic solution with the
transition model and experimental data [
33,
34]. The skin friction coefficient determined by the present deterministic solution could predict the transition point and developing turbulent flow well. The slight early recovery from laminar to turbulent flow and underestimation of the skin friction right after transition agreed well with previous simulation results [
21].
In this study, the drag coefficient was considered as the quantity of interest of UQ. Before discussing the stochastic results of UQ, the predicted drag coefficient obtained by the deterministic solution with the originally fixed model coefficients was 0.00401.
Table 5 shows the drag coefficients predicted by the uncertainty quantification technique with the assumptions of uniform distribution of three model coefficients, c
a2, c
e1, and c
e2, and three methods: two methods are non-intrusive polynomial chaos methods (point-collocation NIPC and non-intrusive spectral [rojection) and a Monte Carlo method with 500 simulations. The mean value and standard deviation (STD) of the drag coefficient of all three methods are presented with respect to the polynomial order.
The mean drag coefficients approached approximately 0.00413, which showed 2.9% difference compared with the deterministic solution, 0.00401. The standard deviation, which could not be predicted by the deterministic simulation, was approximately 0.00018, which was 4.4% of the mean value.
The percent errors of the mean and STD values were, respectively, 0.043% and 0.9% for point-collocation NIPC and 0.014% and 1.29% for NISP when the two methods with fifth-order were compared to those in the Monte Carlo method.
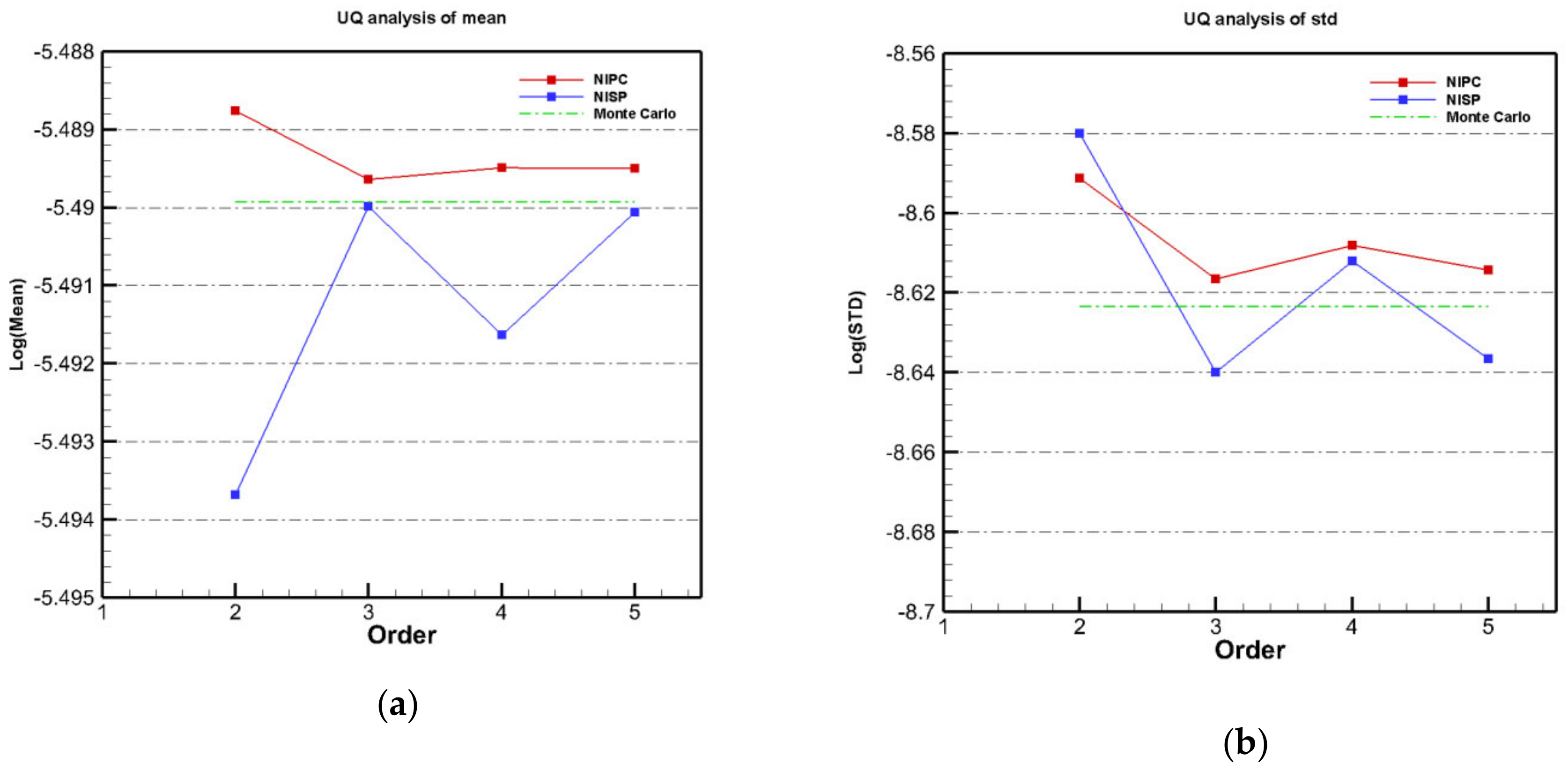
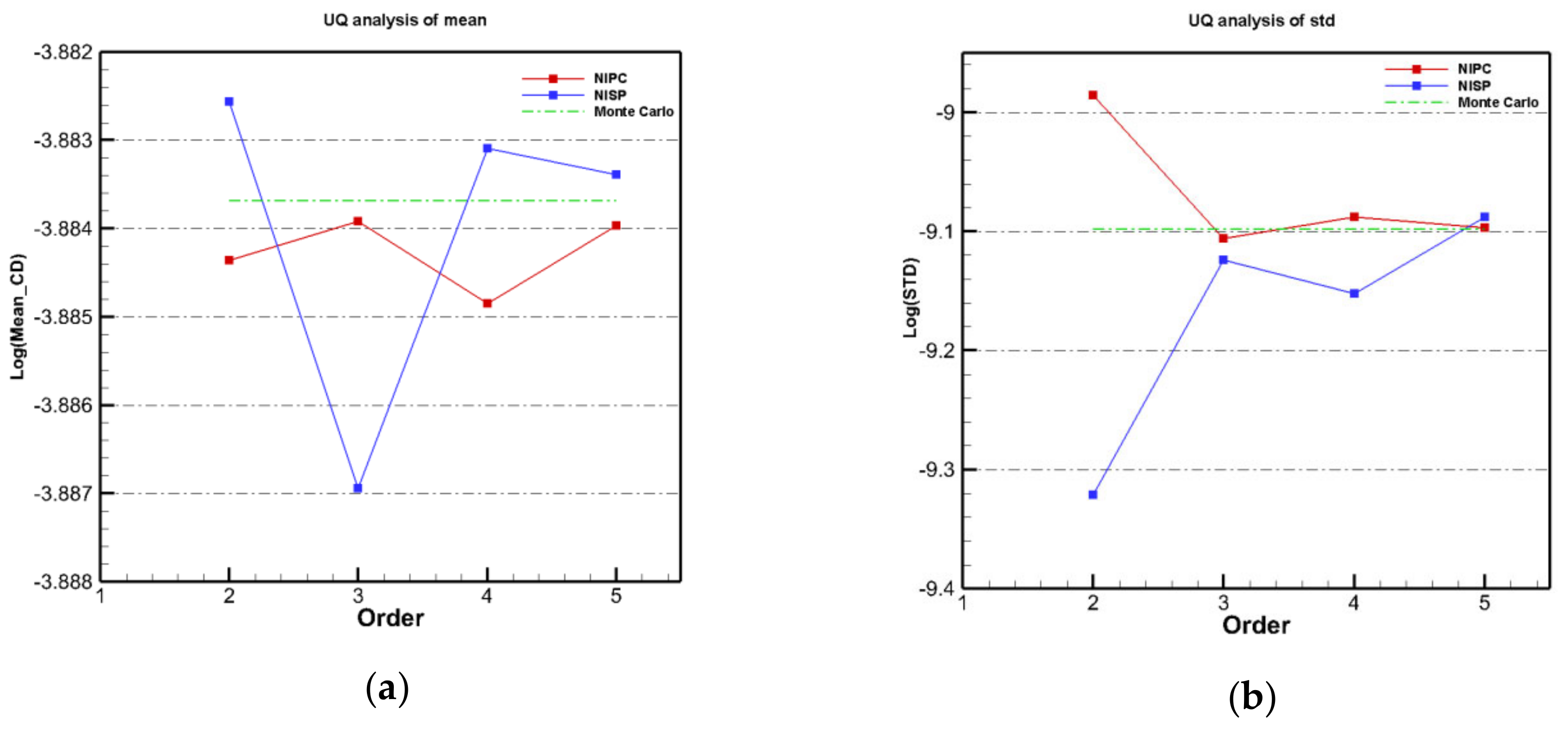
Figure 3 shows the convergence of the mean and STD of the drag coefficient according to the polynomial order of the two methods. The long dashed line is the reference value, which corresponds to the Monte Carlo results. The point-collocation NIPC showed faster convergence of the mean and STD than NISP and consistent values except for the case with second order. However, in NISP, the results of the odd number orders (third and fifth orders) are close to the Monte Carlo results and the results of the even number orders (second and fourth orders) have some discrepancies compared to the reference values.
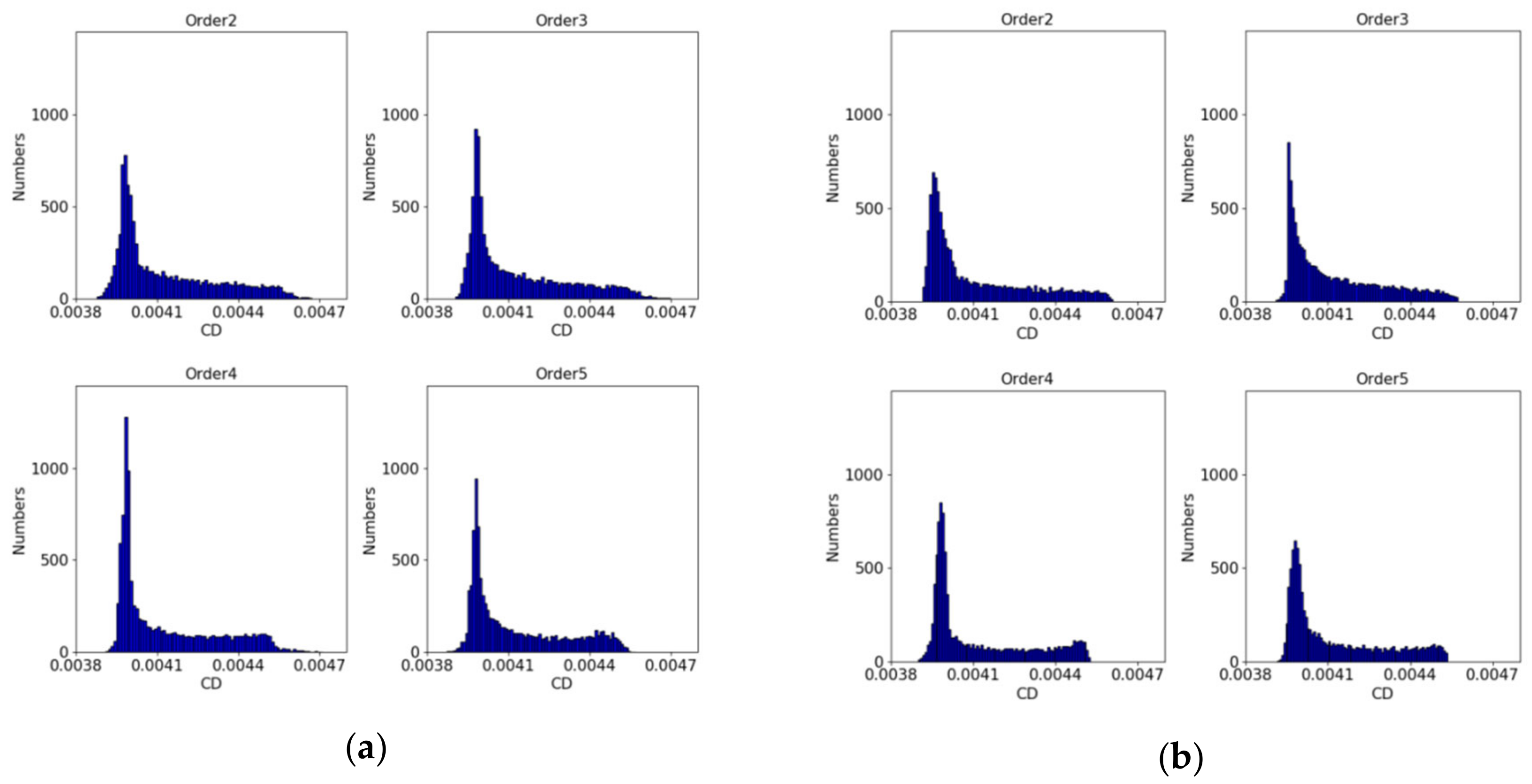
Figure 4 shows the detailed probability density function of the drag coefficient, which was generated from the calculated polynomial coefficients based on 10,000 sampling points by the Latin-Hypercube sampling method. In all cases, the peaks of the probability density function were biased toward lower values with the given interval but the value of the peak showed small differences depending on the polynomial order. As the order increased, the shape of this function had a similar pattern but there was a small difference towards higher drag coefficient values.
4.2. Transitional Flow over Aerospatiale-A Airfoil
In this section, the transitional flow around the Aerospatiale A-airfoil is presented under the conditions of the maximum lift angle of attack (
) and
based on the freestream velocity and chord length as shown in
Figure 5. The information of the geometry and the experimental results for the Aerospatiale-A airfoil is available from the Office National d’Etudes et Recherches Ae1rospatiales F1 (ONERA F1) wind tunnel (Chaput 1997) [
32]. The inflow conditions and grid system are summarized in
Table 6. The turbulent intensity and eddy viscosity ratio were set to
and
[
20], respectively. The length of the upstream part and downstream part were 20c and 25c and the height of the computational domain was 30c. At the upstream and side parts, the velocity inlet boundary condition was given and, at the downstream, the Neumann boundary condition Was set for the outlet. To satisfy
for correct resolving of the turbulent boundary layer, the distance of the first mesh off the wall was
c and the growth ratio was 1.2.
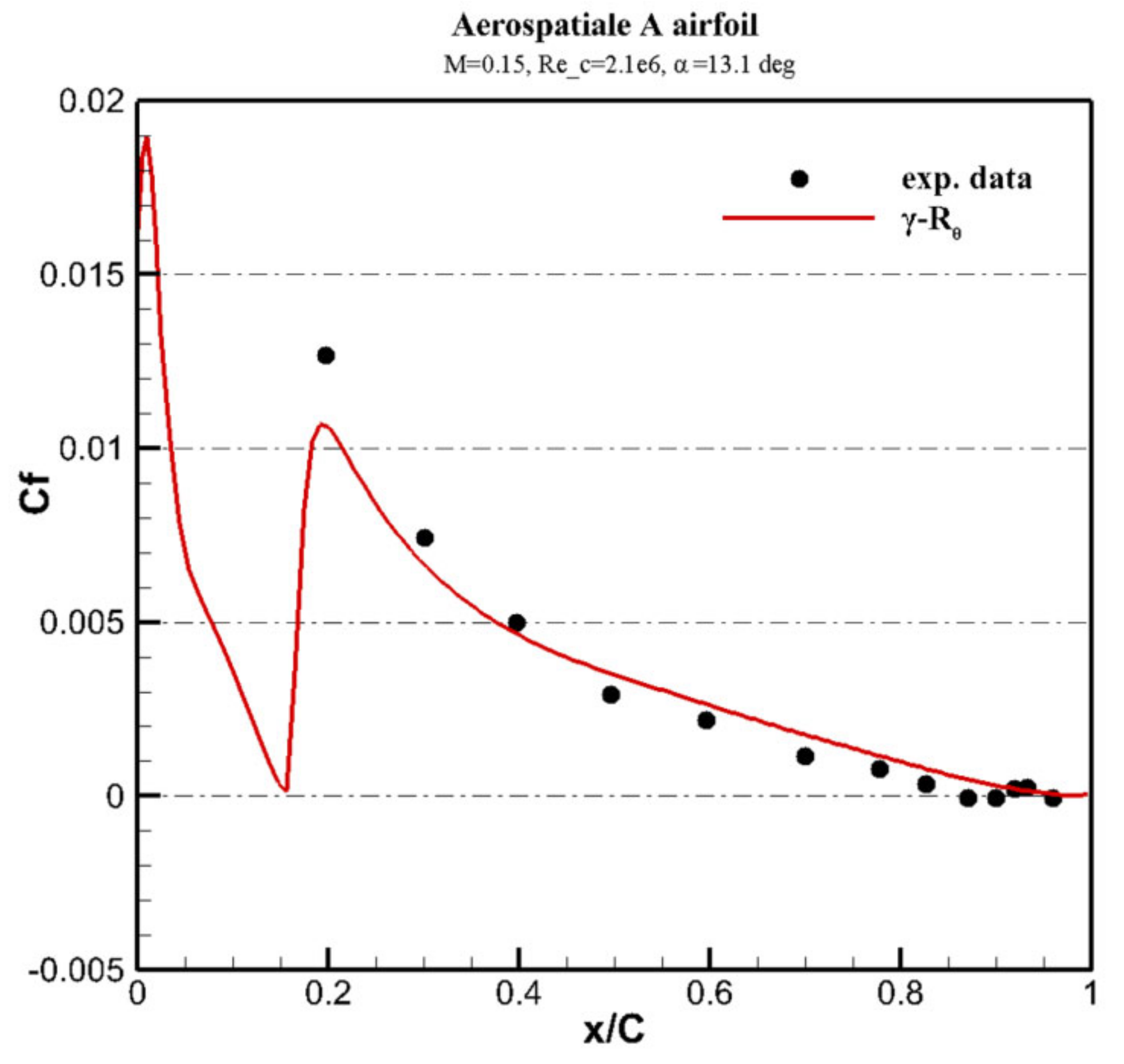
Figure 6 shows the skin friction coefficient distributions over the upper wall of the airfoil predicted by the deterministic solver with the
transition model as well as the comparison with experimental data [
32]. The transition point was predicted to be between 10% and 15% of the chord length, which agreed well with other simulation results [
35]. The behavior with developing turbulent flow after transition showed consistent results with experimental data.
Further, the coefficients of the drag and lift forces were calculated and compared to experimental data, F1 and F2 [
32] as show in
Table 7. Unfortunately, there were large discrepancies between the experimental data, F1 and F2, especially for the drag coefficient. When the measurement sensitivity of this transitional flow was considered, the present simulation showed reasonable results similar to previous simulation results [
35,
36]. It was confirmed that the present simulation adopts adequate methodologies and grid system.
The mean value and STD of the drag and lift coefficients of the Aerospatiale A-Airfoil were calculated using the point-collocation NIPC, NISP, and Monte Carlo methods. The number of samples of Monte Carlo was 500, which was the same as in the previous case.
Table 8 shows the drag coefficient with respect to the polynomial order.
When the polynomial order is 5, the mean drag coefficient was predicted to be 0.020569 by PC-NIPC and 0.020581 by NISP. When these were compared with the deterministic solution of the original model coefficients, it was found that the drag coefficient was not as biased as in the flat plate case.
The percent errors of the mean and STD values were 0.029% and 0.09% for point-collocation NIPC and 0.03% and 0.97% for NISP when the two methods with fifth-order were compared to the Monte Carlo method. When the convergence of the drag coefficient with respect to the polynomial order was checked, the overall pattern was similar to the previous case for the drag coefficient of the flat plate flow. The mean value of the drag coefficient already converged within 0.5% (ΔC
D ~ 0.0001) at the second order, whereas the STD converged after the second polynomial order as shown in
Figure 7. As the polynomial order increased, the mean and STD approached the values obtained by the Monte Carlo method (long dashed line).
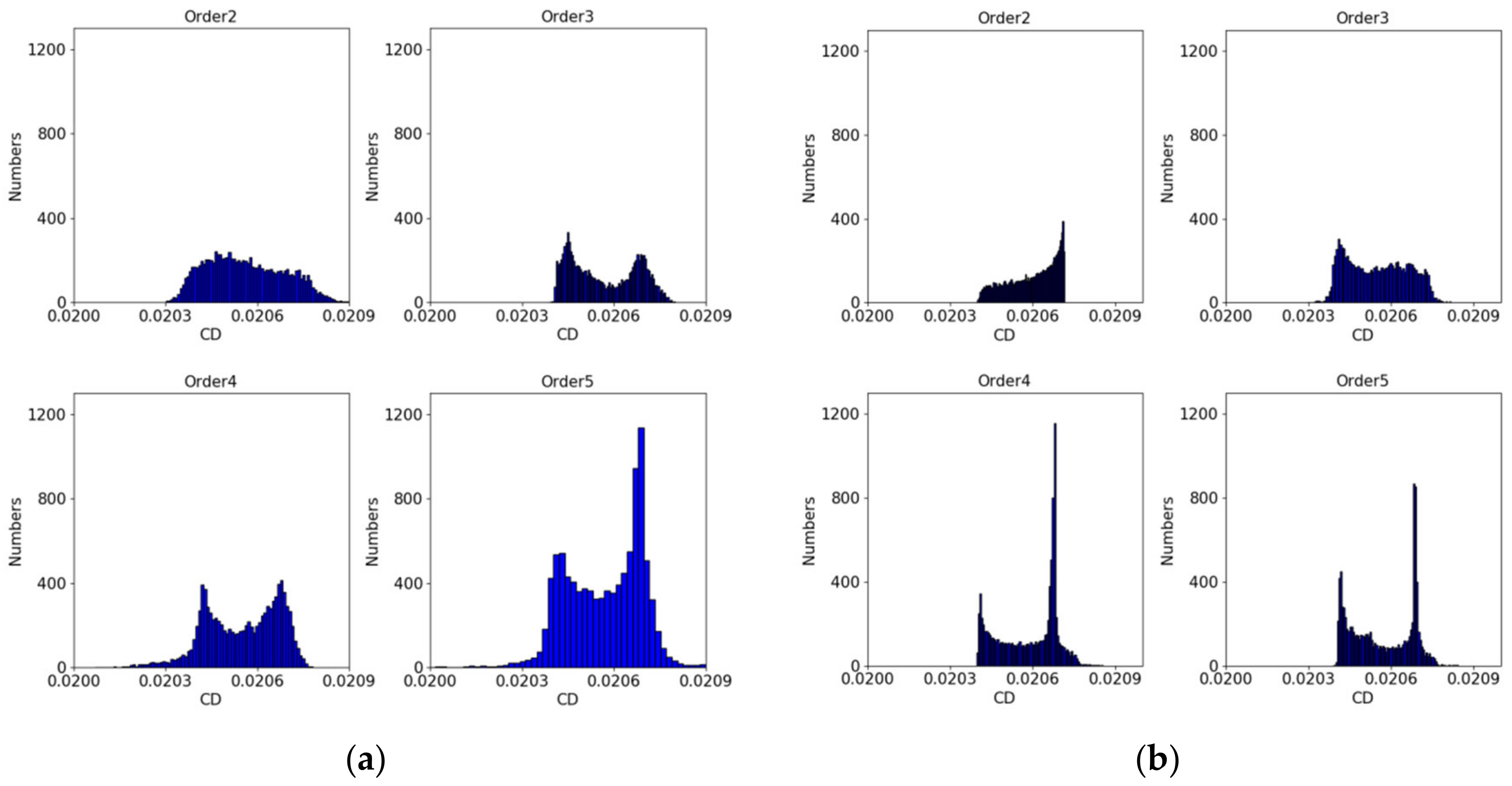
The distributions of the probability density functions of the drag coefficients are plotted with variation of the order in
Figure 8. In this case, the distributions of the PDF revealed different patterns depending the adopted method and the order of the polynomial. In the case of point-collocation NIPC, the distribution of the case with second order was very different form other order cases and had similar patterns starting from the third order. NISP had a similar trend as point-collocation and the results were similar starting from the fourth-order case. Interestingly, there were two peaks in the distribution of the PDF in high-order cases for the two methods. The transitional flow simulation of Aerospatiale A-Airfoil was more sensitive to used grid, convergence criteria and the adopted scheme than the flat plate simulation. This means that the quantities of interest, such as drag and lift coefficients, were sensitive to the computational conditions (grid, convergence criteria and so on) and sampling points that were selected at the given order of polynomial. We presume that the sampling points were insufficient to resolve the exact probabilistic distribution in the lower Orders 2 and 3.
Table 9 shows the mean and STD of the lift coefficient obtained by the three methods. The mean values of all methods were predicted to be approximately 1.399, whereas the deterministic solution was 1.390.
Similar to the convergence of the drag coefficient, the mean value of the lift coefficient converged early from the second order but the STD showed a large difference when the order was 2. At the fifth order, there was a 0.85% difference in point-collocation NIPC and 0.46% in NISP as shown in
Figure 9. Even though the convergence rate of point-collocation NIPC was faster than that of NISP, the accuracy at the highest order (fifth order) was higher in NISP than point-collocation NIPC. The difference between predicted and the deterministic solution value resulted because the distribution of PDF was biased toward the positive difference value, as confirmed in
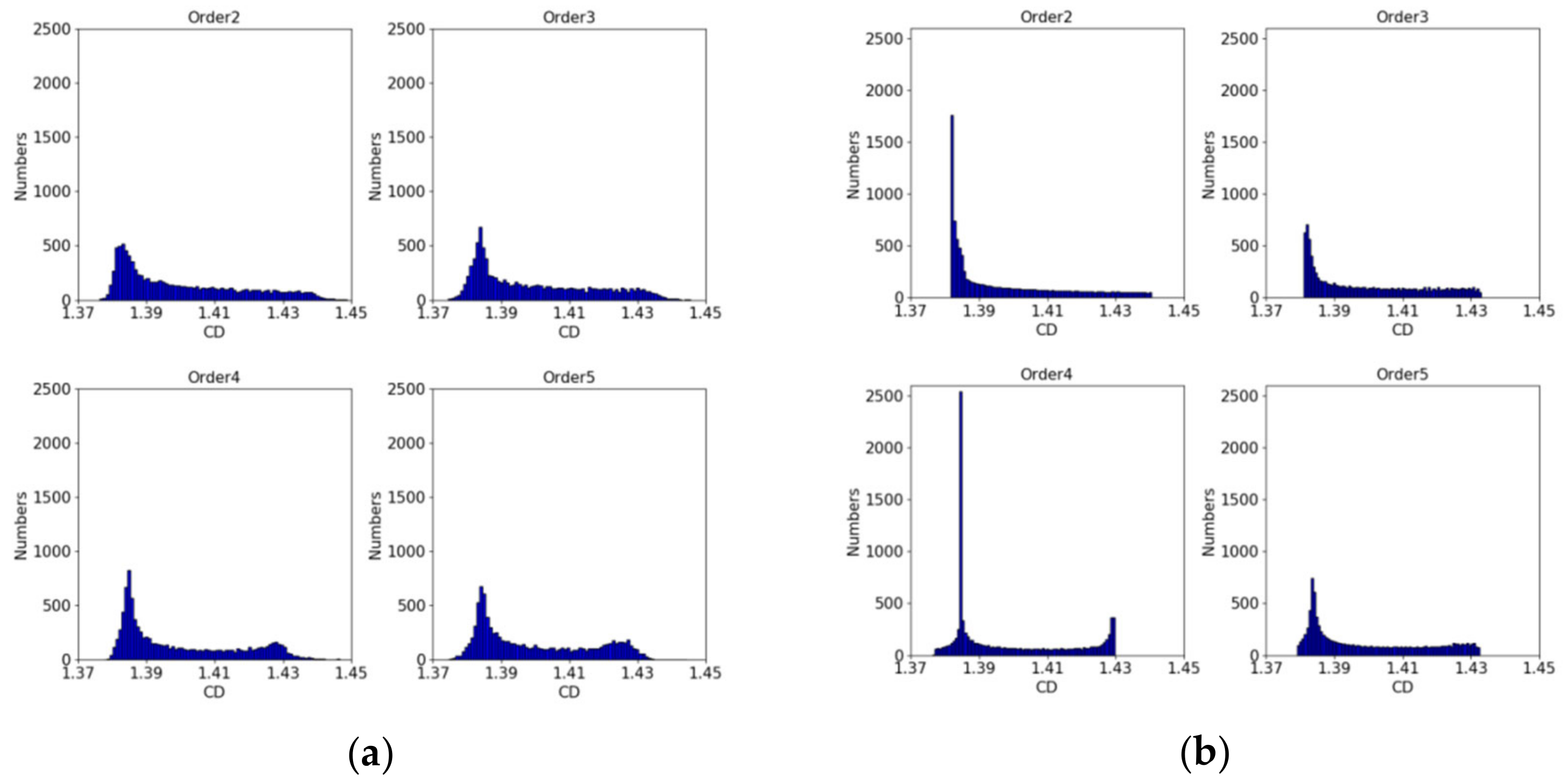
Figure 10.
In the lift coefficient, similar patterns of the PDF were obtained depending on the method and the order. Even though the peak of PDF was located at a lower value, the flat distributions of the lift coefficients ranged to the value of 1.43 or 1.44 in every case. This broad distribution towards a higher lift coefficient made the predicted mean lift coefficient move to a higher value than the deterministic solution.
4.3. Comparison of the Two Methods
Figure 11 describes the distribution of the PDF of point-collocation NIPC and NISP for the fifth-order polynomial and Monte Carlo method with 500 sampling points. In the case of flat plate, the peak values of the drag coefficients, 0.0041, agreed well in the three methods, NISP, PC-NIPC and Monte Carlo. This peak was located at a higher value than that (0.00401) of the deterministic solution. In the drag coefficients of Aerospatiale A-Airfoil simulation, there were two peaks in the PDF and the left peak was lower than the right one in every method. The predicted peak values in NISP and PC-NIPC methods were approximately 0.0206 with 0.03% error with that of Monte Carlo method. The pattern of the distribution of the lift coefficient in A-Airfoil simulation was similar to that of the drag coefficient in the flat plate simulation. The peak value of NISP showed smaller difference with 0.46% than that of PC-NIPC (0.86%) when compared with the Monte Carlo result. Even though the number of samplings (500) in the present work was not sufficient to get the converged solution of MC, the overall pattern distribution and the number of the peak were consistent between MC and two adopted methods. When the number of sample points for the UQ technique was considered, even though point-collocation NIPC required fewer samples than NISP (
Table 3), similar accuracy and PDF as the mean and STD of the quantities of interest could be obtained. In particular, the number of random variables increased and the point-collocation NIPC was useful from a computational cost and time point of view.
Sensitivity analysis of three model coefficients, c
a2, c
e1, and c
e2, was carried out using the Sobol index of the two methods (
Table 10 and
Table 11). The Sobol indices provided quantitative information regarding how much effect the corresponding random parameters had on quantities of interest. In the point-collocation NIPC and NISP methods, the most effective model coefficient was calculated as
Ce1, whose Sobol index was generally over 90% in all outputs of both the flat plate and A-airfoil cases. The model coefficient
Ce1 was included in the source term of the transport equation of the intermittency and was related to the
Flegnth and
Fonset terms. The other two variables,
Ce2 and
Ca2, showed similar effects on the results of less than 5% of Sobol indices. This means that more careful calibration of the model coefficient
Ce1 was required compared to the other coefficients for better prediction of transitional flow.
Figure 12 displays the distribution of the skin friction coefficient from point-collocation NIPC at the fifth order. It was confirmed that the change of the model coefficients had a significant effect on the variation of the skin friction coefficient at the location of the flat plate. There was a small STD before the transition point (i.e., laminar flow region) and then a large STD after the transition (i.e., developing turbulent flow region). This means that the model closure coefficients had a large effect on the turbulent flow region of the deterministic solution.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}