Classification of Pulmonary CT Images by Using Hybrid 3D-Deep Convolutional Neural Network Architecture


Abstract
1. Introduction
2. Related Works
3. Material and Method
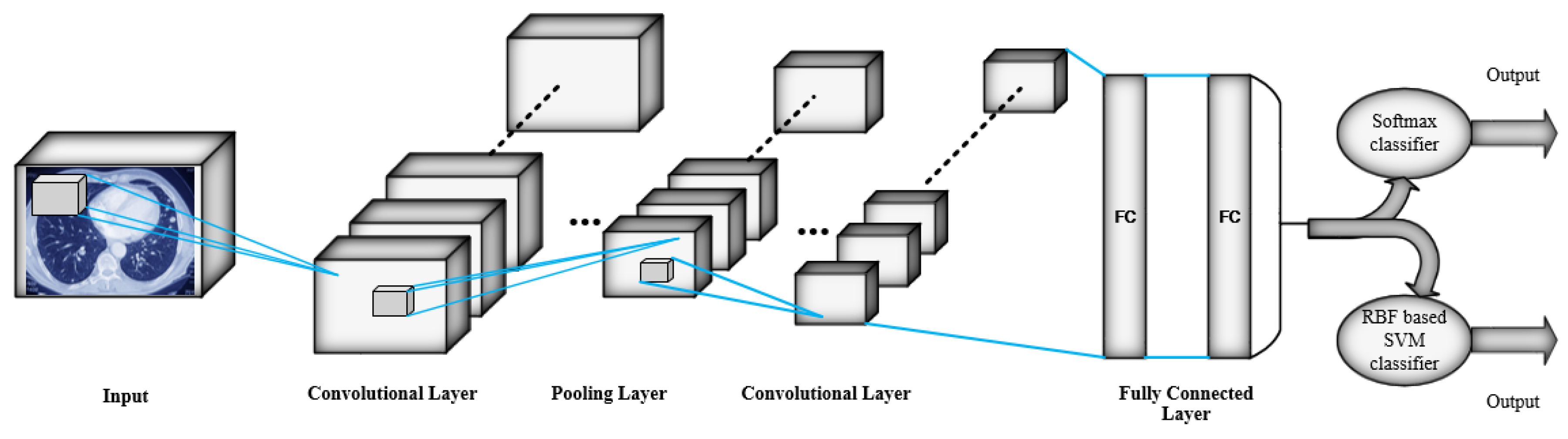
3.1. Convolutional Neural Network
3.1.1. Convolutional Layer
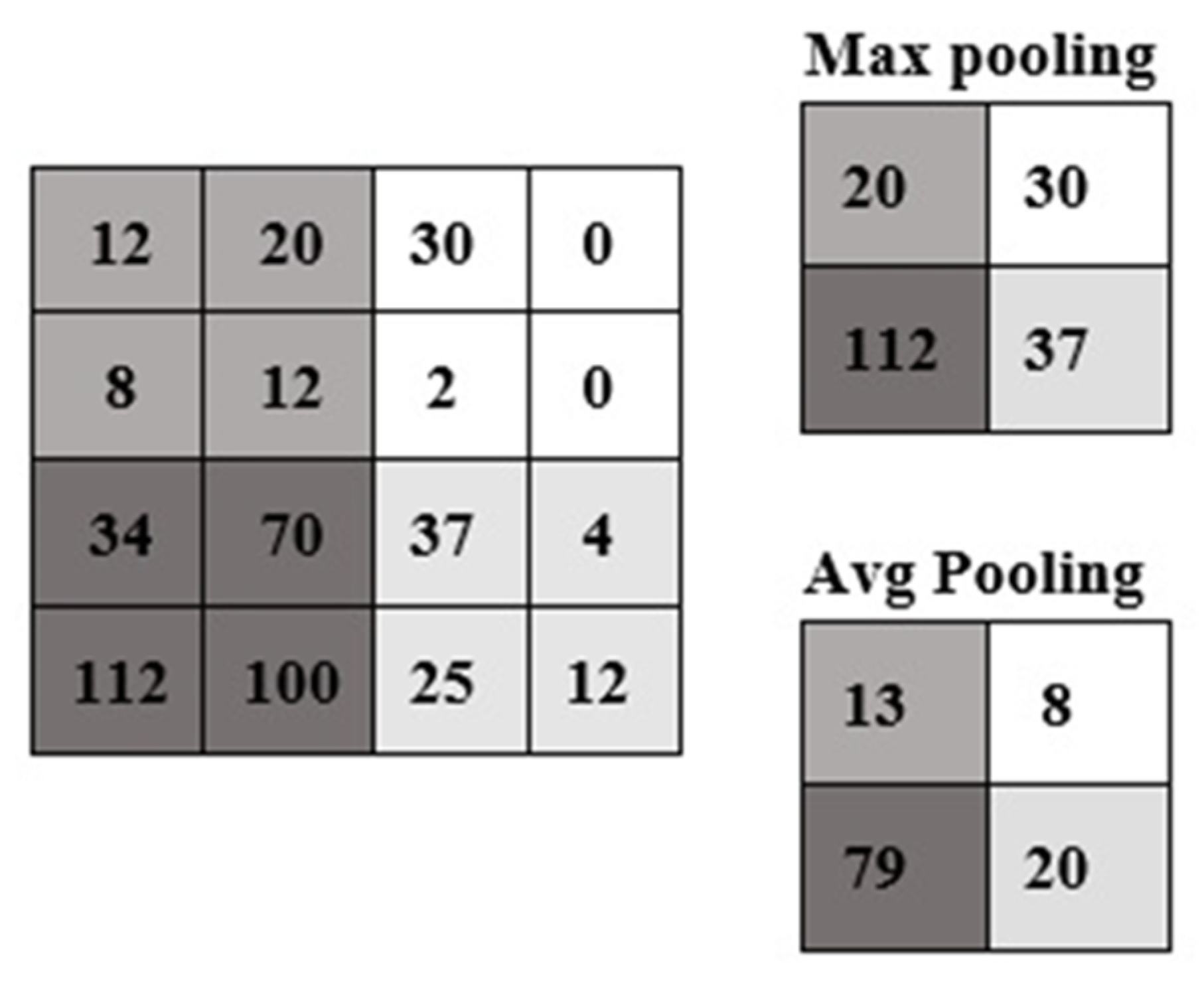
3.1.2. Pooling Layer (Subsampling)
3.1.3. Fully Connected Layer
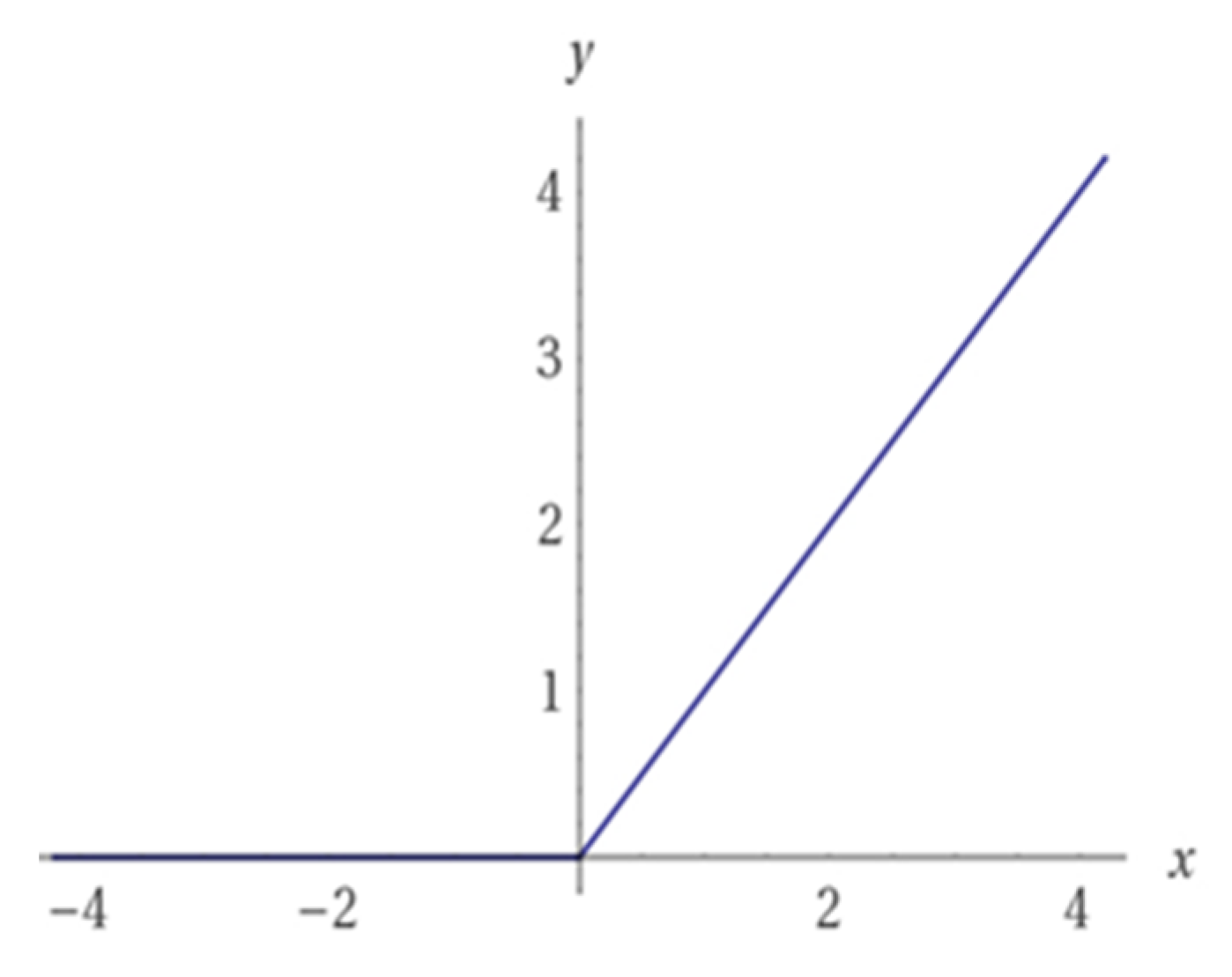
3.1.4. Relu Activation Function
3.1.5. Softmax Layer
3.2. Radial Basis Function (RBF) Kernel-Based SVM Classifier
3.3. Performance Metrics
- TP—positive samples which are predicted accurately as a positive label.
- FN—positive samples which are predicted incorrectly as a negative label.
- FP—negative samples which are incorrectly predicted as a positive label.
- TN—negative samples which are correctly predicted as a negative label.
- Accuracy—performance evaluation of the classification algorithm.
- Sensitivity (Recall)—indicates what proportion of classified classes as a positive label have positive class labels.
- Precision—indicates the proportion of classified classes as positive on all positive predicted labels.
- Specificity—indicates what proportion of classified classes as a negative label have negative class labels.
4. Classification of Lung CT Images
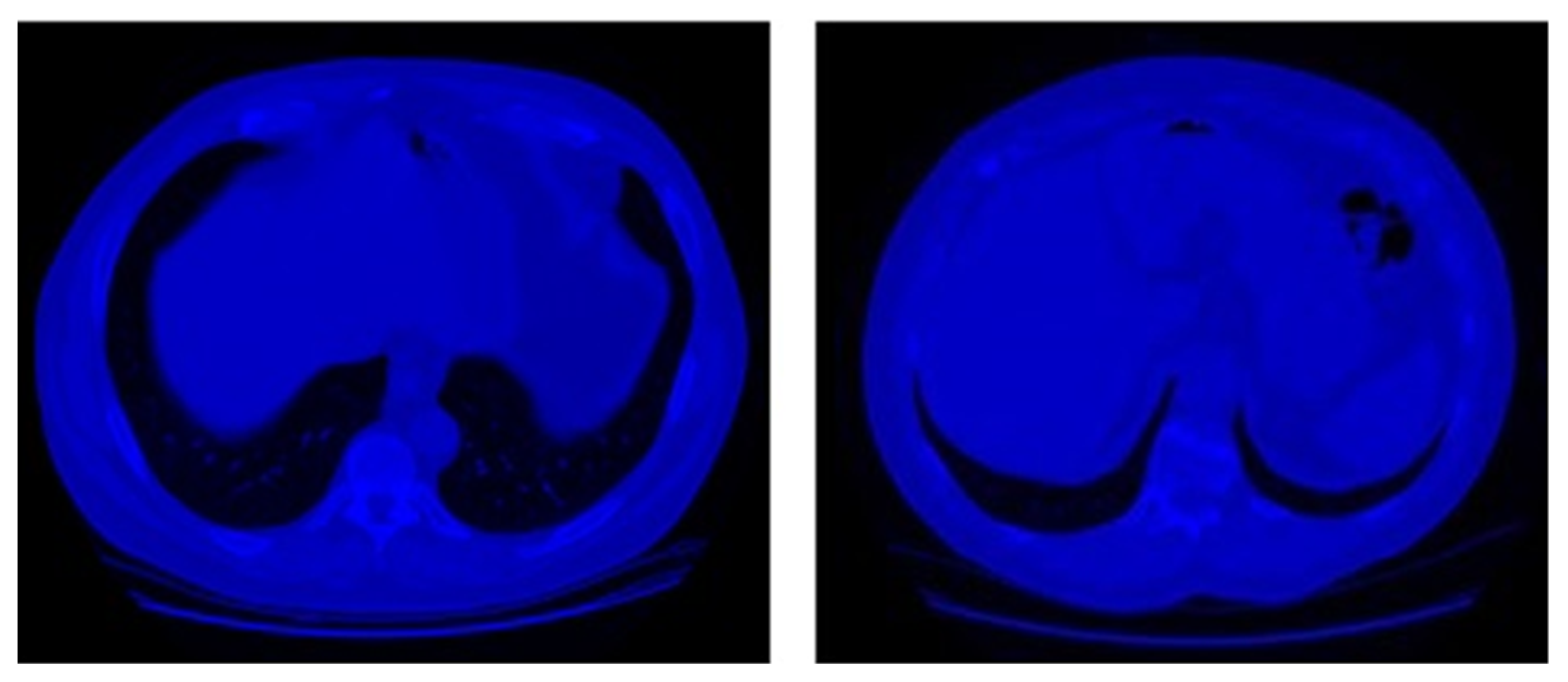
4.1. Dataset and Preparing
4.2. Proposed 3D-CNN Architectures for Classification of Lung CT
4.3. AlexNet Architecture for Classification of Lung CT Images
4.4. GoogleNet Architecture for Classification of Lung CT Images
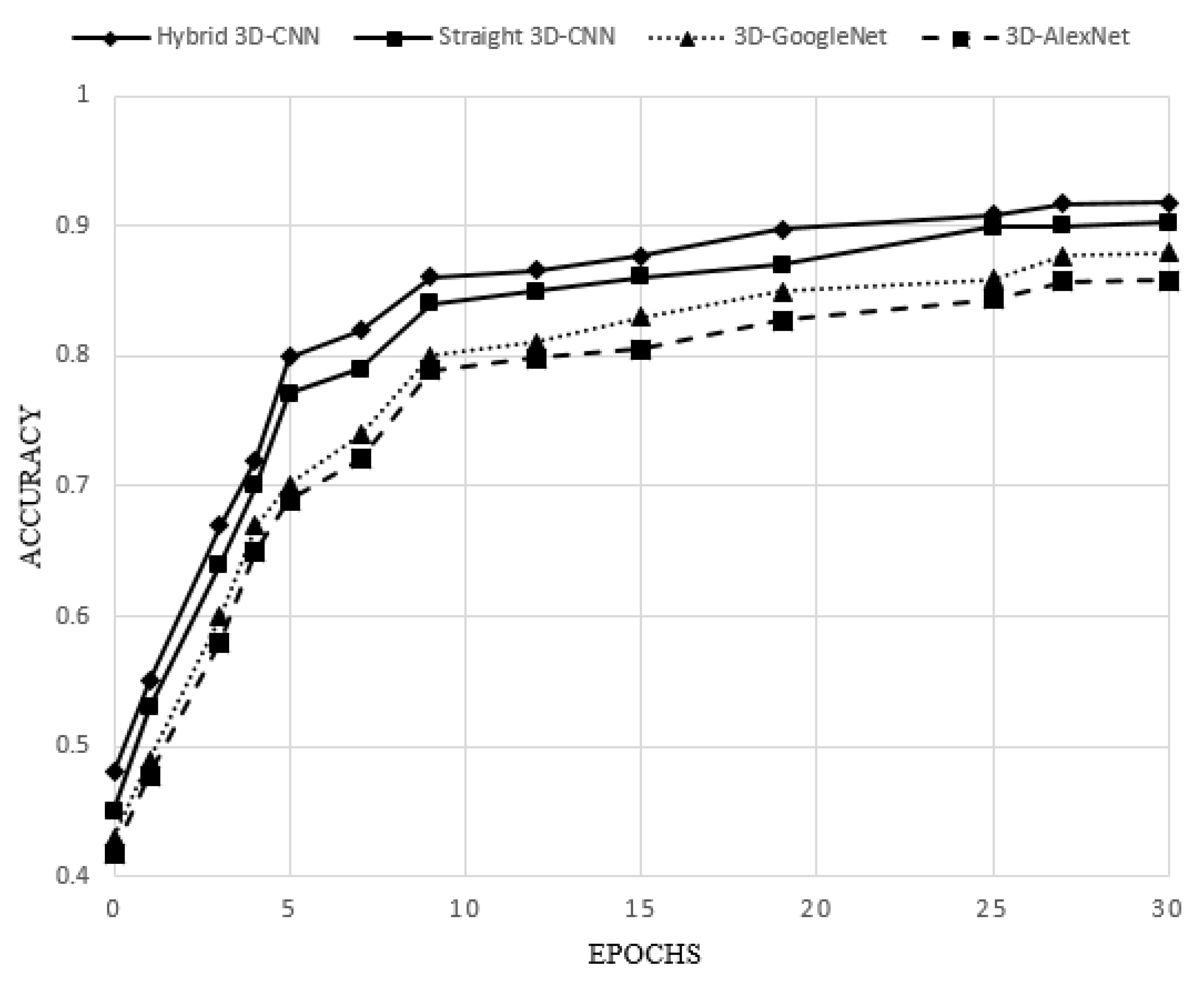
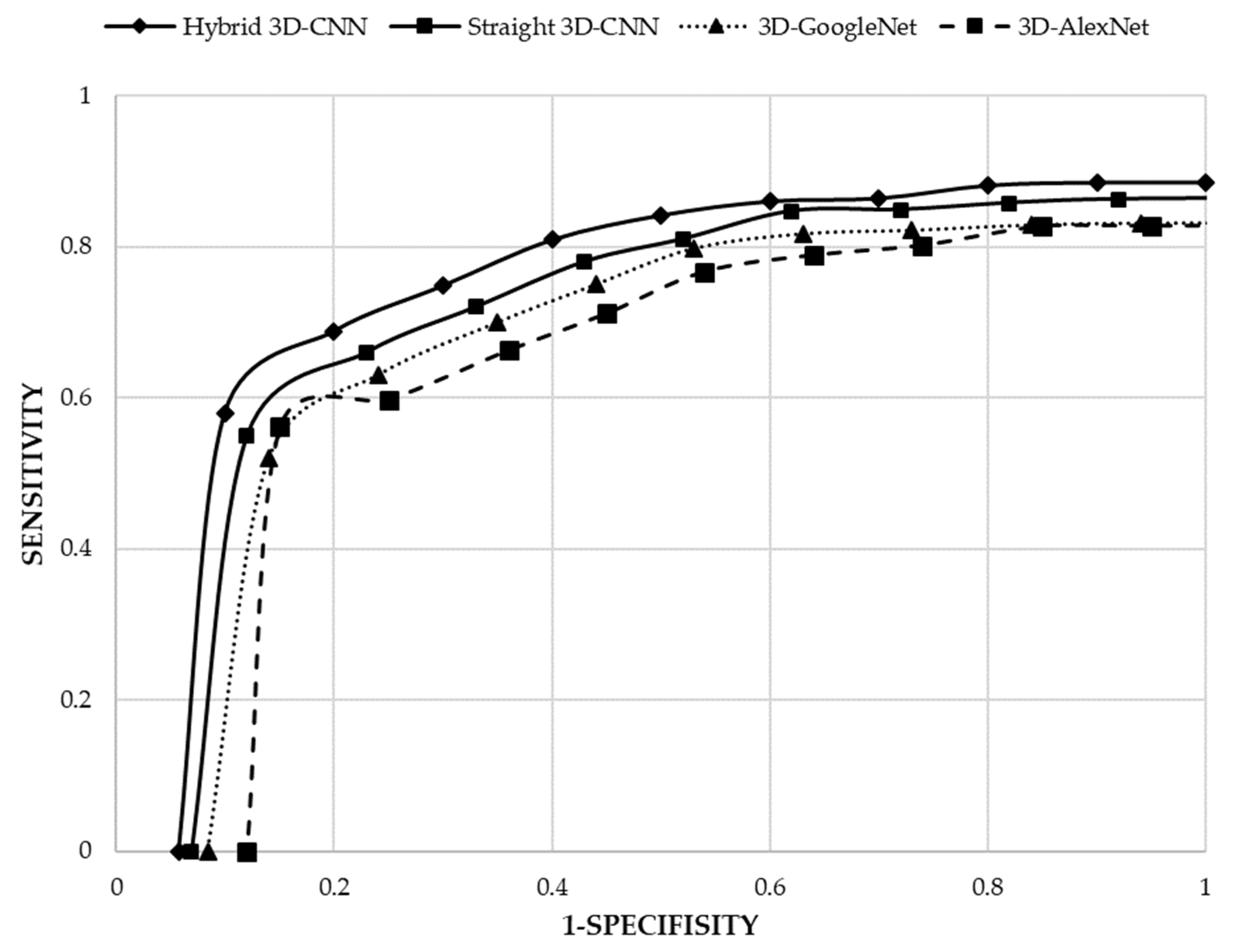
5. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Firmino, M.; Angelo, G.; Morais, H.; Dantas, M.R.; Valentim, R. Computer aided detection (CADe) and diagnosis (CADx) system for lung cancer with likelihood of malignancy. BioMed. Eng. OnLine 2016, 15, 2. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Long, F.; Tang, F.; Jing, Y.; Wang, X.; Yao, L.; Ma, J.; Fei, Y.; Chen, L.; Wang, G.; et al. Autofluorescence Imaging and Spectroscopy of Human Lung Cancer. Appl. Sci. 2017, 7, 32. [Google Scholar] [CrossRef]
- Wingo, P.A.; Ries, L.A.G.; Giovino, G.A.; Miller, D.S.; Rosenberg, H.M.; Shopland, D.R.; Thun, M.J.; Edwards, B.K. Annual Report to the Nation on the Status of Cancer, 1973–1996, With a Special Section on Lung Cancer and Tobacco Smoking. J. Natl. Cancer Inst. 1999, 91, 675–690. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, A.; Panditrao, A. Classification of lung cancer stages on CT scan images using image processing. In Proceedings of the IEEE International Conference on Advanced Communications, Control and Computing Technologies, Ramanathapuram, India, 8–10 May 2014. [Google Scholar]
- Cheng, J.Z.; Ni, D.; Chou, Y.H.; Qin, J.; Tiu, C.M.; Chang, Y.C.; Huang, C.S.; Shen, D.; Chen, C.M. Computer-Aided Diagnosis with Deep Learning Architecture: Applications to Breast Lesions in US Images and Pulmonary Nodules in CT Scans. Sci. Rep. 2016, 6, 24454. [Google Scholar] [CrossRef] [PubMed]
- Geng, M.; Wang, Y.; Tian, Y.; Huang, T. CNUSVM: Hybrid CNN-Uneven SVM Model for Imbalanced Visual Learning. In Proceedings of the IEEE Second International Conference on Multimedia Big Data, Taipei, Taiwan, 20–22 April 2016. [Google Scholar]
- Cascio, D.; Taormina, V.; Raso, G. Deep Convolutional Neural Network for HEp-2 Fluorescence Intensity Classification. Appl. Sci. 2019, 9, 408. [Google Scholar] [CrossRef]
- Sun, W.; Zheng, B.; Qian, W. Computer aided lung cancer diagnosis with deep learning algorithms. In Proceedings of the International Society for Optics and Photonics Conference, San Diego, CA, USA, 24 March 2016. [Google Scholar]
- Ginneken, B.V.; Setio, A.A.A.; Jacobs, C.; Ciompi, F. Off-The-Shelf Convolutional Neural Network Features for Pulmonary Nodule Detection in Computed Tomography Scans. In Proceedings of the IEEE 12th International Symposium on Biomedical Imaging (ISBI), New York, NY, USA, 16–19 April 2015. [Google Scholar]
- Anthimopoulos, M.; Christodoulidis, S.; Ebner, L.; Christe, A.; Mougiakakou, S. Lung Pattern Classification for Interstitial Lung Diseases Using a Deep Convolutional Neural Network. IEEE Trans. Med. Imaging 2016, 35, 1207–1216. [Google Scholar] [CrossRef] [PubMed]
- Gruetzemacher, R.; Gupta, A. Using Deep Learning for Pulmonary Nodule Detection & Diagnosis. In Proceedings of the Twenty-Second Americas Conference on Information Systems, San Diego, CA, USA, 11 August 2016. [Google Scholar]
- Ciompi, F.; Chung, K.; Riel, S.J.V.; Setio, A.A.A.; Gerke, P.K.; Jacobs, C.; Scholten, E.T.; Prokop, C.S.; Wille, M.M.W.; Marchianò, A.; et al. Towards automatic pulmonary nodule management in lung cancer screening with deep learning. Sci. Rep. 2017, 7, 46479. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Cai, W.; Wang, X.; Zhou, Y.; Feng, D.D.; Chen, M. Medical Image Classification with Convolutional Neural Network. In Proceedings of the 13th International Conference on Control, Automation, Robotics & Vision, Marina Bay Sands, Singapore, 10–12 December 2014. [Google Scholar]
- Shen, W.; Zhou, M.; Yang, F.; Yang, C.; Tian, J. Multi-scale Convolutional Neural Networks for Lung Nodule Classification. Inf. Process. Med. Imaging 2015, 24, 588–599. [Google Scholar] [PubMed]
- Rao, P.; Pereira, N.A.; Srinivasan, R. Convolutional Neural Networks for Lung Cancer Screening in Computed Tomography (CT) Scans. In Proceedings of the 2nd International Conference on Contemporary Computing and Informatics (IC3I), Noida, India, 14–17 December 2016. [Google Scholar]
- Song, Q.Z.; Zhao, L.; Luo, X.K.; Dou, X.C. Using Deep Learning for Classification of Lung Nodules on Computed Tomography Images. J. Healthc. Eng. 2017, 2017, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Bondfale, N.; Banait, S. Lung Pattern Classification for Interstitial Lung Diseases Using a Deep Convolutional Neural Network. IJARCCE 2017, 5, 9851–9856. [Google Scholar]
- Data Science Bowl 2017. Kaggle. Available online: https://www.kaggle.com/c/data-science-bowl-2017 (accessed on 5 February 2019).
- Alakwaa, W.; Nassef, M.; Badr, A. Lung Cancer Detection and Classification with 3D Convolutional Neural Network (3D-CNN). IJACSA 2017, 8, 409–417. [Google Scholar] [CrossRef]
- Kuan, K.; Ravaut, M.; Manek, G.; Chen, H.; Lin, J.; Nazir, B.; Chen, C.; Howe, T.C.; Zeng, Z.; Chandrasekhar, V. Deep Learning for Lung Cancer Detection: Tackling the Kaggle Data Science Bowl 2017 Challenge. arXiv, 2017; arXiv:1705.09435. [Google Scholar]
- Liao, F.; Liang, M.; Li, Z.; Hu, X.; Song, S. Evaluate the Malignancy of Pulmonary Nodules Using the 3D Deep Leaky Noisy-or Network. J. Latex Class Files 2015, 14, 1–12. [Google Scholar]
- Serj, M.F.; Lavi, B.; Hoff, G.; Valls, D.P. A Deep Convolutional Neural Network for Lung Cancer Diagnostic. arXiv, 2018; arXiv:1804.08170. [Google Scholar]
- Jin, T.; Cui, H.; Zeng, S.; Wang, X. Learning deep spatial lung features by 3D convolutional neural network for early cancer detection. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications (DICTA), Sydney, Australia, 29 November–1 December 2017. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Laszlo, E.; Szolgay, P.; Nagy, Z. Analysis of a GPU based CNN implementation. In Proceedings of the 13th International Workshop on Cellular Nanoscale Networks and their Applications, Turin, Italy, 29–31 August 2012. [Google Scholar]
- Hinton, G.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Hubel, D.H.; Wiesel, T.N. Receptive Fields and Functional Architecture of Monkey Striate Cortex. J. Physiol. 1968, 195, 215–243. [Google Scholar] [CrossRef] [PubMed]
- Turaga, S.C.; Murray, J.F.; Jain, V.; Roth, F.; Helmstaedter, M.; Briggman, K.; Denk, W.; Seung, H.S. Convolutional Networks Can Learn to Generate Affinity Graphs for Image Segmentation. Neural Comput. 2010, 22, 511–538. [Google Scholar] [CrossRef] [PubMed]
- Szegedy, C.; Liu, W.; Jia, W.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. arXiv, 2014; arXiv:1409.4842. [Google Scholar]
- Image Net. Available online: http://www.webcitation.org/query?url=http%3A%2F%2Fimage-net.org%2F&date=2017-12-27 (accessed on 4 February 2019).
- Leung, H.; Haykin, S. The Complex Backpropagation Algorithm. IEEE Trans. Signal Process. 1991, 39, 2101–2104. [Google Scholar] [CrossRef]
- Scherer, D.; Müller, A.; Behnke, S. Evaluation of Pooling Operations in Convolutional Architectures for Object Recognition. In Proceedings of the 20th International Conference on Artificial Neural Networks (ICANN), Thessaloniki, Greece, 15–18 September 2010. [Google Scholar]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of the 30th International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013. [Google Scholar]
- Kang, X.; Song, B.; Sun, F. A Deep Similarity Metric Method Based on Incomplete Data for Traffic Anomaly Detection in IoT. Appl. Sci. 2019, 9, 135. [Google Scholar] [CrossRef]
- Bouchard, G. Efficient Bounds for the Softmax Function and Applications to Approximate Inference in Hybrid models. In Proceedings of the Presentation at the Workshop For Approximate Bayesian Inference in Continuous/Hybrid Systems at Neural Information Processing Systems (NIPS), Meylan, France, 31 May 2008. [Google Scholar]
- Mu, T.; Nandi, A.K. Breast cancer detection from FNA using SVM with different parameter tuning systems and SOM–RBF classifier. J. Frankl. Inst. 2007, 344, 285–311. [Google Scholar] [CrossRef]
- Suapang, P.; Dejhan, K.; Yimmun, S. Medical Image Compression and DICOM-Format Image Archive. In Proceedings of the ICROS-SICE International Joint Conference, Fukuoka, Japan, 18–21 August 2009. [Google Scholar]
- Gücük, A.; Üyetürk, U. Usefulness of hounsfield unit and density in the assessment and treatment of urinary stones. World J. Nephrol. 2014, 6, 282–286. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems 25 (NIPS 2012), Lake Tahoe, NV, USA, 3–6 Decemeber 2012. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Type | Number of Kernels | Kernel Size | Output Size |
|---|---|---|---|
| Convolutional | 96 | 3 × 3 × 3 | 96 × 114 × 114 × 114 |
| Max pooling | 2 × 2 × 2 | 96 × 113 × 113 × 113 | |
| Convolutional | 128 | 3 × 3 × 3 | 128 × 111 × 111 × 111 |
| Convolutional | 256 | 3 × 3 × 3 | 256 × 109 × 109 × 109 |
| Max pooling | 2 × 2 × 2 | 256 × 54 × 54 × 54 | |
| Convolutional | 324 | 3 × 3 × 3 | 324 × 51 × 51 × 51 |
| Convolutional | 324 | 3 × 3 × 3 | 324 × 49 × 49 × 49 |
| Max pooling | 2 × 2 × 2 | 324 × 24 × 24 × 24 | |
| Convolutional | 512 | 3 × 3 × 3 | 512 × 12 × 12 × 12 |
| Max pooling | 2 × 2 × 2 | 512 × 6 × 6 × 6 | |
| Fully connected | 1000 × 1 × 1 × 1 | ||
| Fully connected | 1000 × 1 × 1 × 1 | ||
| Softmax/RBF-based SVM | 2 × 1 × 1 × 1 |
| Layer Type | Number of Kernels | Kernel Size | Output Size |
|---|---|---|---|
| Convolutional | 96 | 11 × 11 × 11 | 96 × 55 × 55 × 55 |
| Max pooling | 3 × 3 × 3 | 96 × 27 × 27 × 27 | |
| Convolutional | 256 | 5 × 5 × 5 | 256 × 27 × 27 × 27 |
| Max pooling | 3 × 3 × 3 | 256 × 13 × 13 × 13 | |
| Convolutional | 384 | 3 × 3 × 3 | 384 × 13 × 13 × 13 |
| Convolutional | 256 | 3 × 3 × 3 | 256 × 13 × 13 × 13 |
| Max pooling | 3 × 3 × 3 | 256 × 6 × 6 × 6 | |
| Fully connected | 4096 × 1 × 1 × 1 | ||
| Fully connected | 4096 × 1 × 1 × 1 | ||
| Fully connected with softmax | 2 × 1 × 1 × 1 |
| Layer Type | Number of Kernels | Kernel Size | Output Size |
|---|---|---|---|
| Convolutional | 64 | 7 × 7 × 7 | 64 × 112 × 112 × 112 |
| Max pooling | 3 × 3 × 3 | 64 × 56 × 56 × 56 | |
| Convolutional | 192 | 3 × 3 × 3 | 192 × 56 × 56 × 56 |
| Max pooling | 3 × 3 × 3 | 192 × 28 × 28 × 28 | |
| Inception 3(a) | 256 × 28 × 28 × 28 | ||
| Inception 3(b) | 480 × 28 × 28 × 28 | ||
| Max pooling | 3 × 3 × 3 | 480 × 14 × 14 × 14 | |
| Inception 4(a) | 512 × 14 × 14 × 14 | ||
| Inception 4(b) | 512 × 14 × 14 × 14 | ||
| Inception 4(c) | 512 × 14 × 14 × 14 | ||
| Inception 4(d) | 528 × 14 × 14 × 14 | ||
| Inception 4(e) | 832 × 14 × 14 × 14 | ||
| Max pooling | 3 × 3 × 3 | 832 × 7 × 7 × 7 | |
| Inception 5(a) | 832 × 7 × 7 × 7 | ||
| Inception 5(b) | 1024 × 7 × 7 × 7 | ||
| Avg pooling | 7 × 7 × 7 | 1024 × 1 × 1 × 1 | |
| Fully connected | 1024 × 1 × 1 × 1 | ||
| Fully connected with softmax | 2 × 1 × 1 × 1 |
| Architecture | Classifier (%) | Sensitivity (%) | Precision (%) | Specificity (%) | Accuracy (%) |
|---|---|---|---|---|---|
| 3D-AlexNet | Softmax | 82.74 | 83.66 | 88.04 | 85.79 |
| 3D-GoogleNet | Softmax | 83.17 | 88.36 | 91.61 | 87.95 |
| Straight 3D-CNN | Softmax | 86.40 | 90.37 | 93.09 | 90.23 |
| Hybrid 3D-CNN | RBF-based SVM | 88.53 | 91.91 | 94.23 | 91.81 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Polat, H.; Danaei Mehr, H. Classification of Pulmonary CT Images by Using Hybrid 3D-Deep Convolutional Neural Network Architecture. Appl. Sci. 2019, 9, 940. https://doi.org/10.3390/app9050940
Polat H, Danaei Mehr H. Classification of Pulmonary CT Images by Using Hybrid 3D-Deep Convolutional Neural Network Architecture. Applied Sciences. 2019; 9(5):940. https://doi.org/10.3390/app9050940
Chicago/Turabian StylePolat, Huseyin, and Homay Danaei Mehr. 2019. "Classification of Pulmonary CT Images by Using Hybrid 3D-Deep Convolutional Neural Network Architecture" Applied Sciences 9, no. 5: 940. https://doi.org/10.3390/app9050940
APA StylePolat, H., & Danaei Mehr, H. (2019). Classification of Pulmonary CT Images by Using Hybrid 3D-Deep Convolutional Neural Network Architecture. Applied Sciences, 9(5), 940. https://doi.org/10.3390/app9050940