On the Nature of Pressure Wave Propagation through Ducts for Structural Health Monitoring Application

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction: Crack Localization Based on Pressure Wave Propagation
1.1. Additive Manufacturing
1.2. Structural Health Monitoring
1.3. Effective Structural Health Monitoring
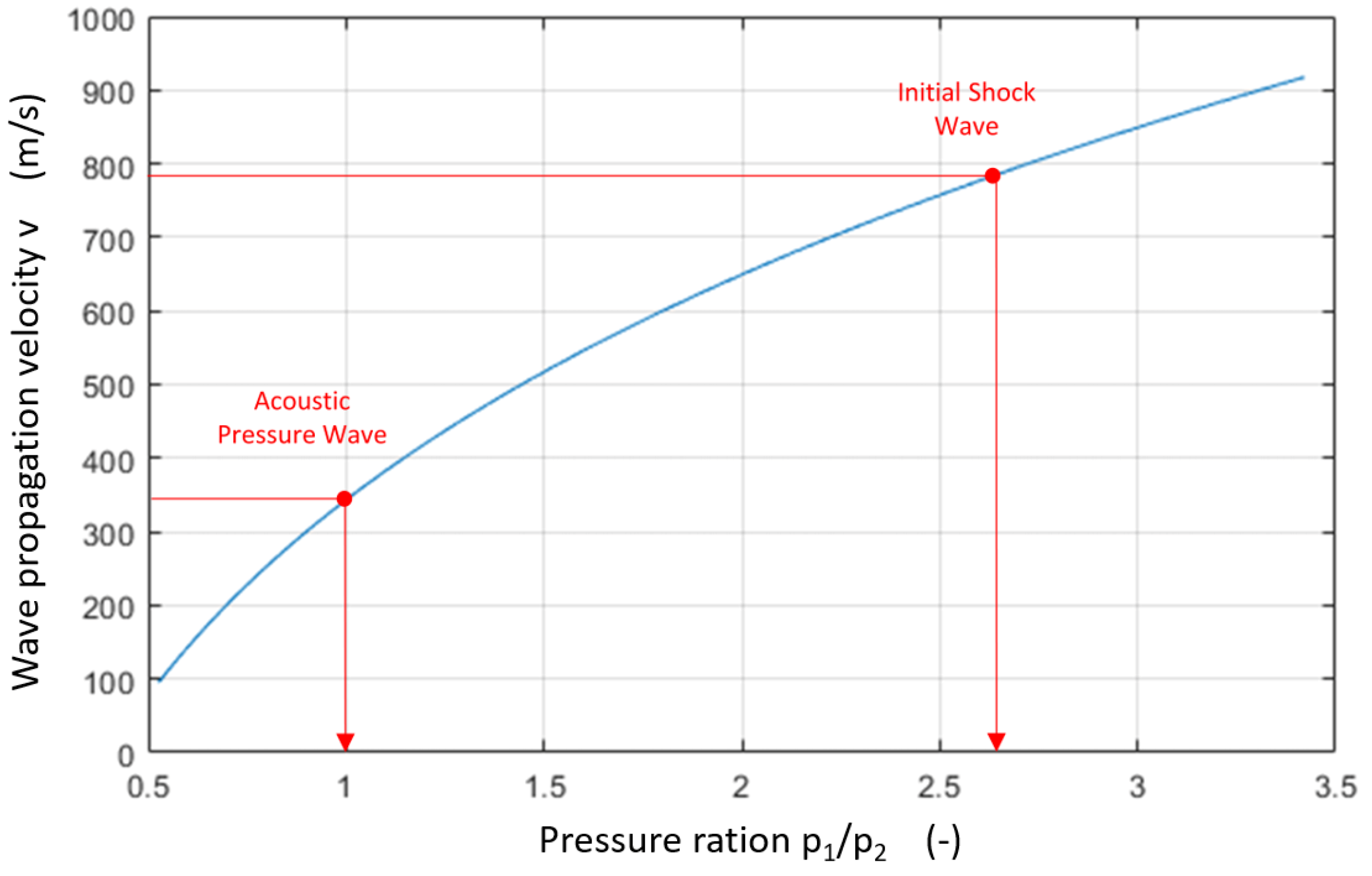
1.4. Nature of Pressure Wave Propagation
1.5. Objectives and Methodology
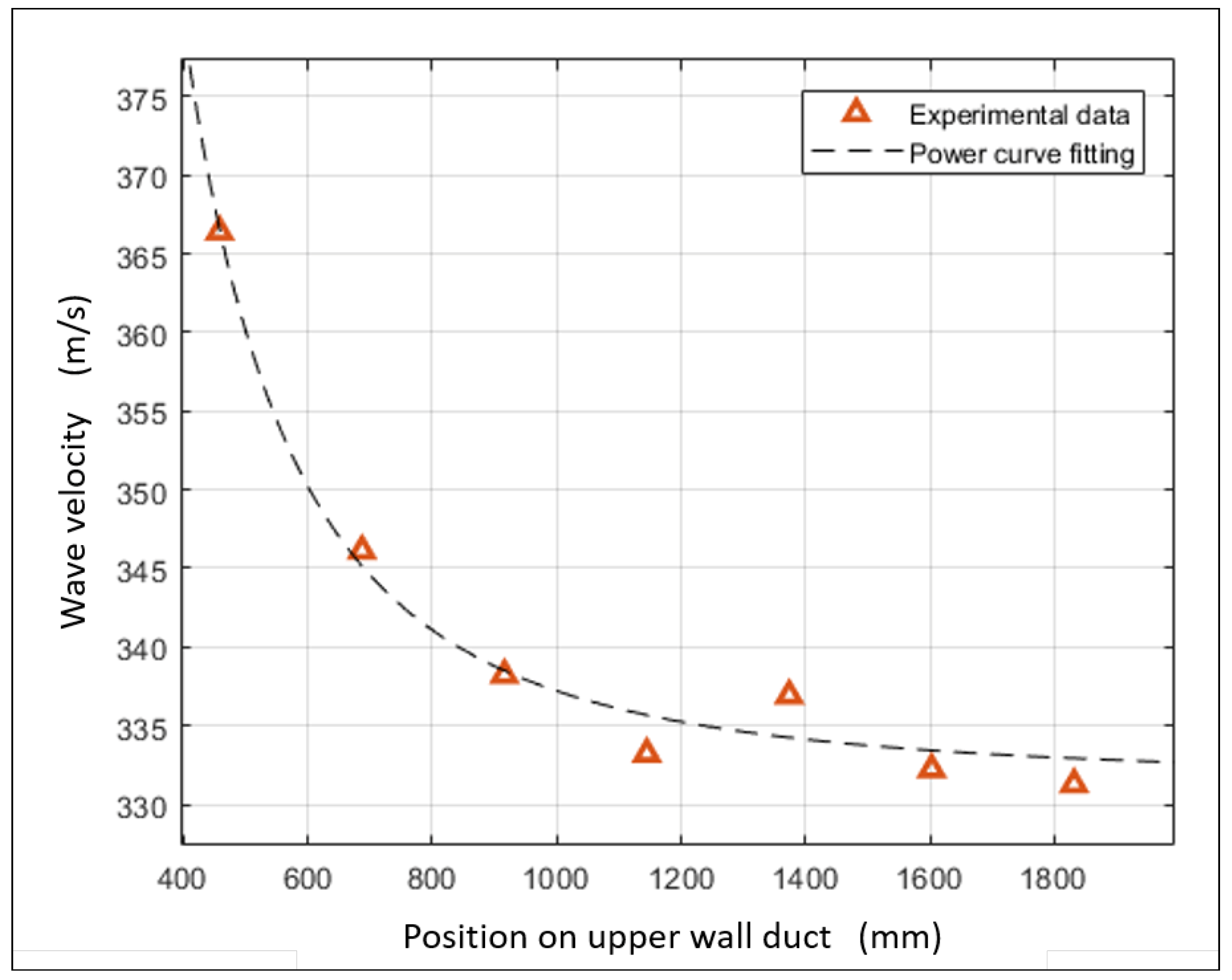
- Previous experiments described in [10,11] were performed on short ducts of around m. In this work, longer ducts of m are considered. In this way, a deeper understanding of the propagation behavior of the wave can be obtained. Next to that, it allows analyzing if the system can be used for larger components, where the effect of friction could become important due to the longer length of the capillaries and therefore influence the wave propagation speed and localization accuracy.
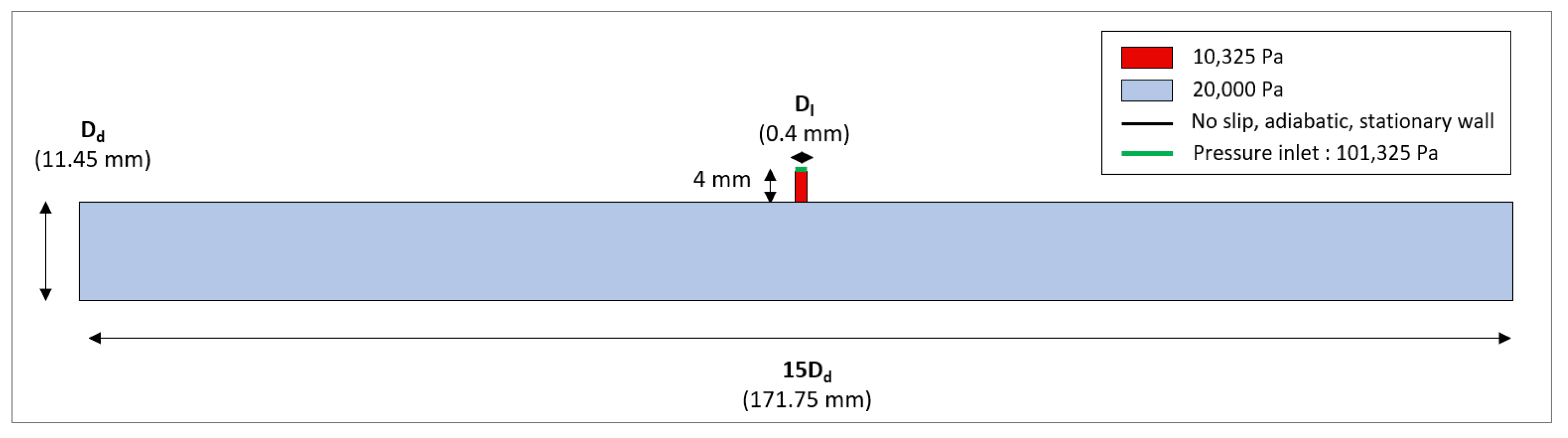
- The diameter and location of the capillary channels is of high importance in terms of structural integrity of the part. The inclusion of capillaries in the structure reduce its resistance and should as a consequence be optimized to the smallest possible dimension. Considering a trade-off between the actual 3D printing accuracy and the structural integrity of the component, the capillary diameter should not exceed mm. For practical reasons, in the present study, a duct diameter of mm is considered. In this way, the physics behind the problem can be understood without having to tackle the difficulties implied by the real small-scale dimensions. As highlighted before, the wave propagation through larger scale ducts is also widely used for pipeline leak detection; see [21]. Therefore, this work will address research questions that are relevant for both leak localization techniques (small and large scale). According to Rocha’s equation [22] for choked flow, the diameter ratio is the only geometrical parameter affecting the amplitude of the propagating wave:in which represents the static atmospheric pressure condition in the leak. To obtain the same amplitude in this study as for the real application with capillary channels, the diameter ratio is set at the same value; see Equation (4). The pressure jump of the wave is expected to equal Pa; see Equation (3). More information about the geometry is given in Section 2.1.1.
2. Numerical Study: Physical Understanding of Wave Propagation Mechanism
2.1. Numerical Parameters
2.1.1. Geometry
2.1.2. Initial and Boundary Conditions
2.1.3. Solution Methods
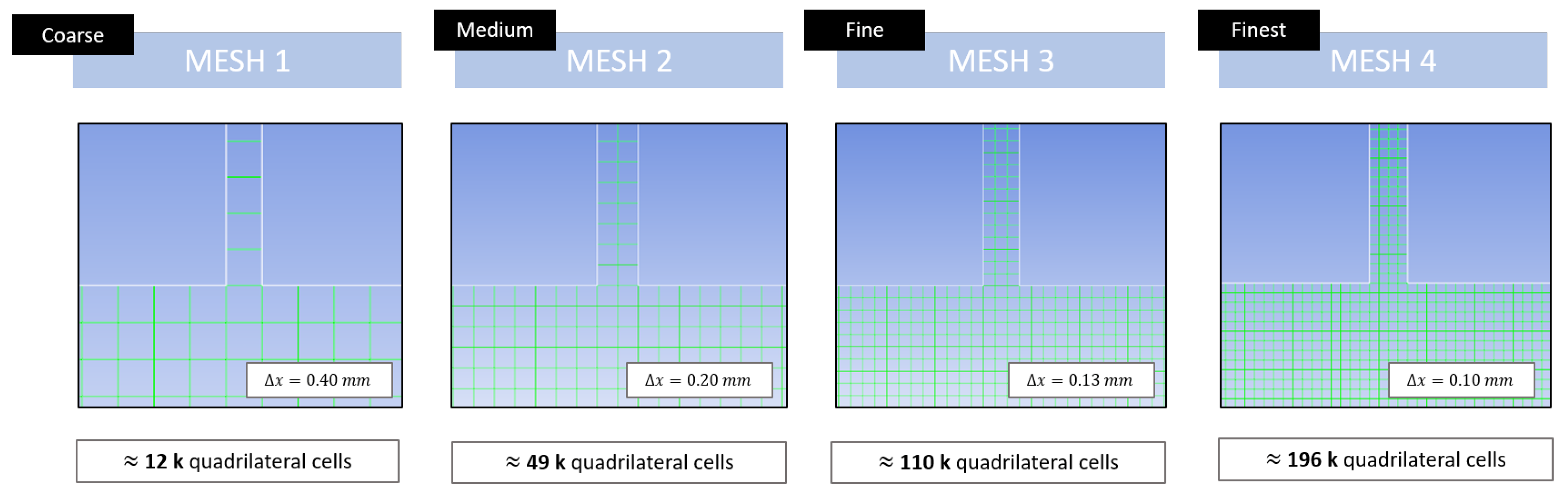
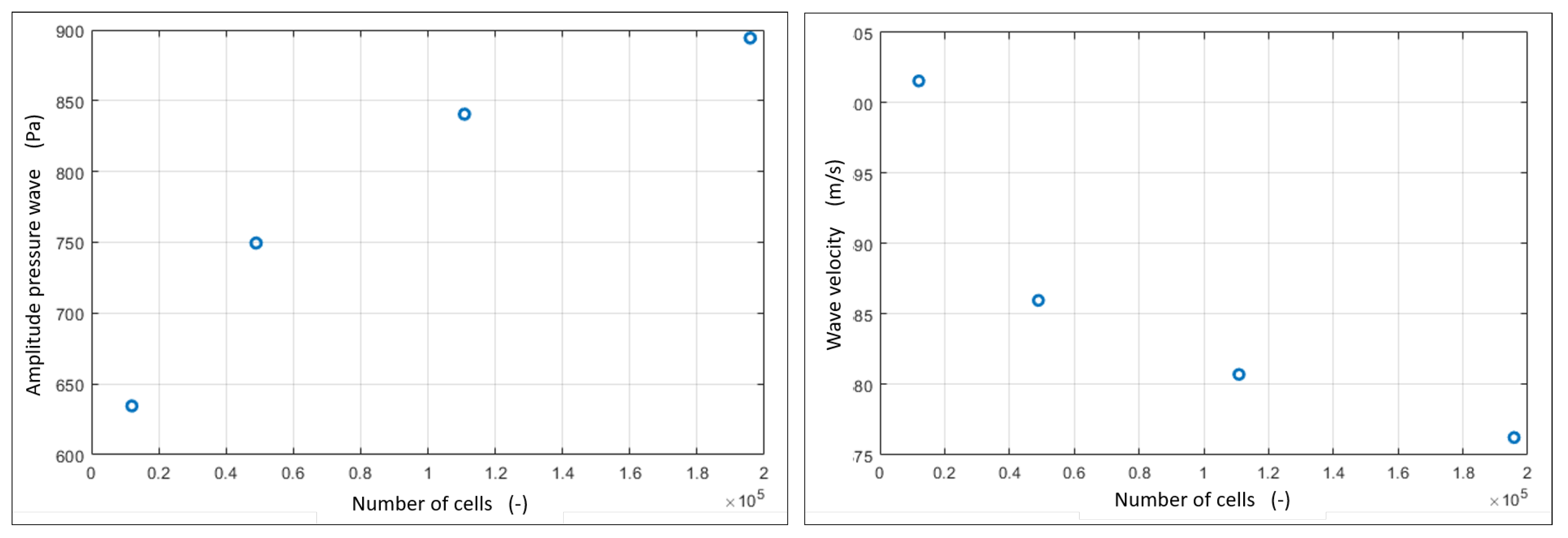
2.1.4. Grid Convergence Study
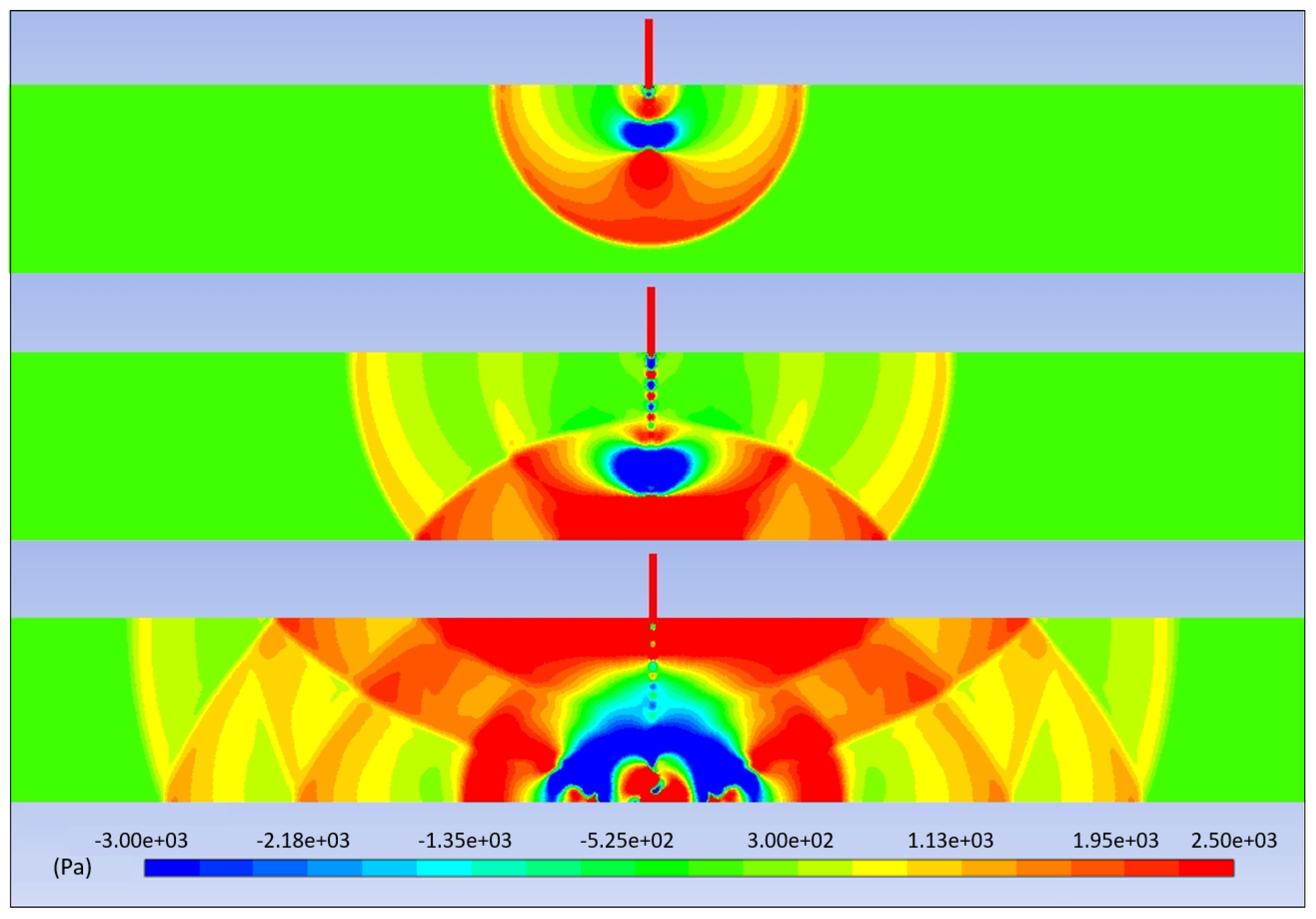
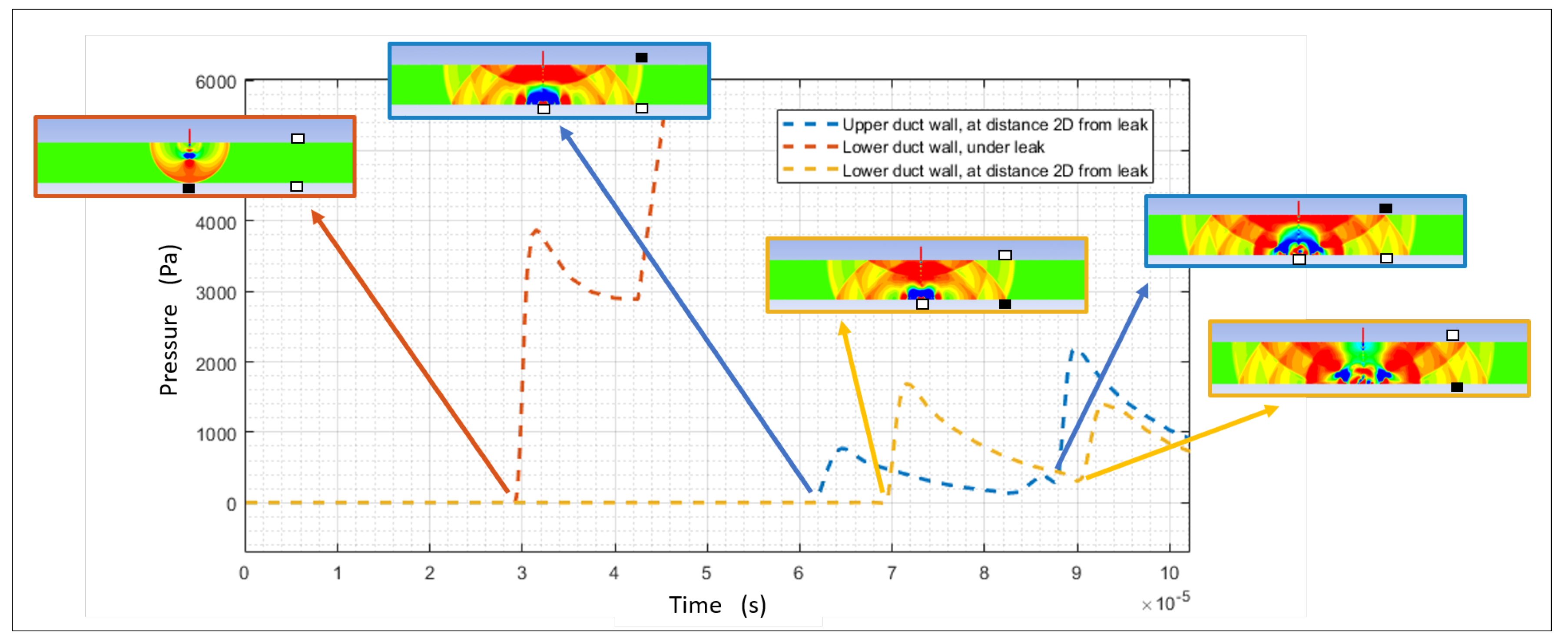
2.2. Results: Shock Wave Propagation Visualization
3. Experimental Study: Validation of Simulations and Quantification Effect of Friction
3.1. Setup Description
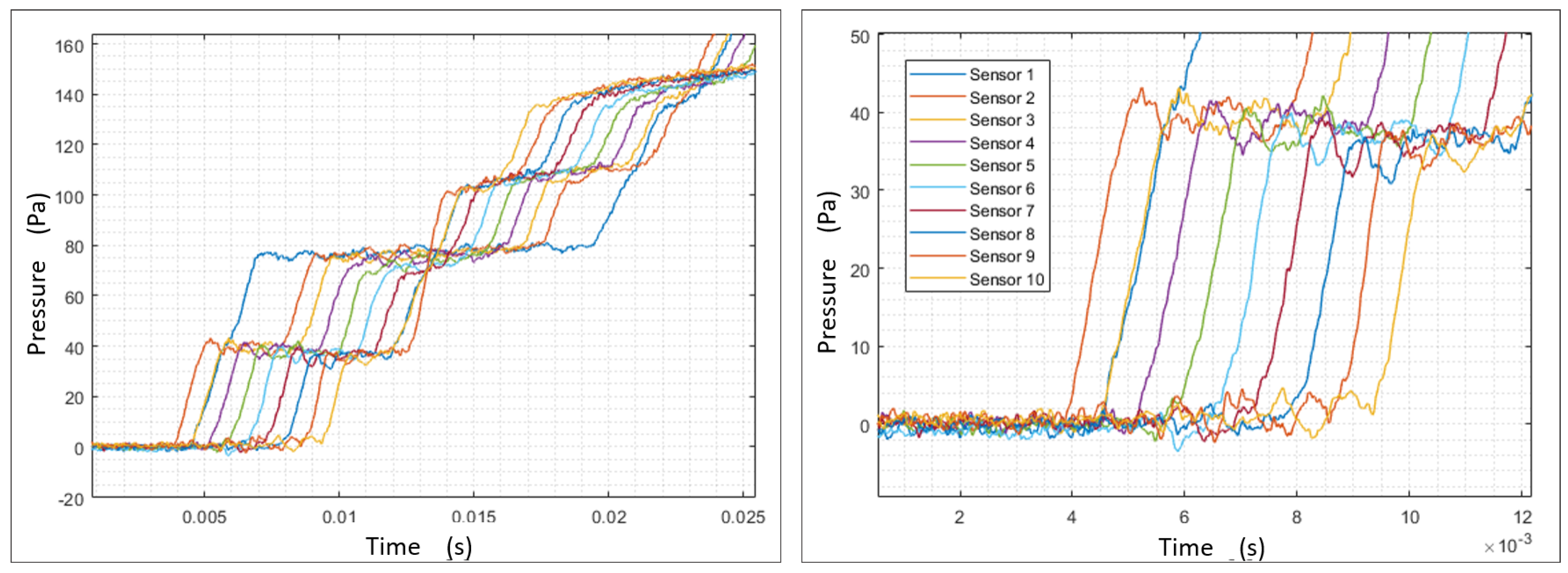
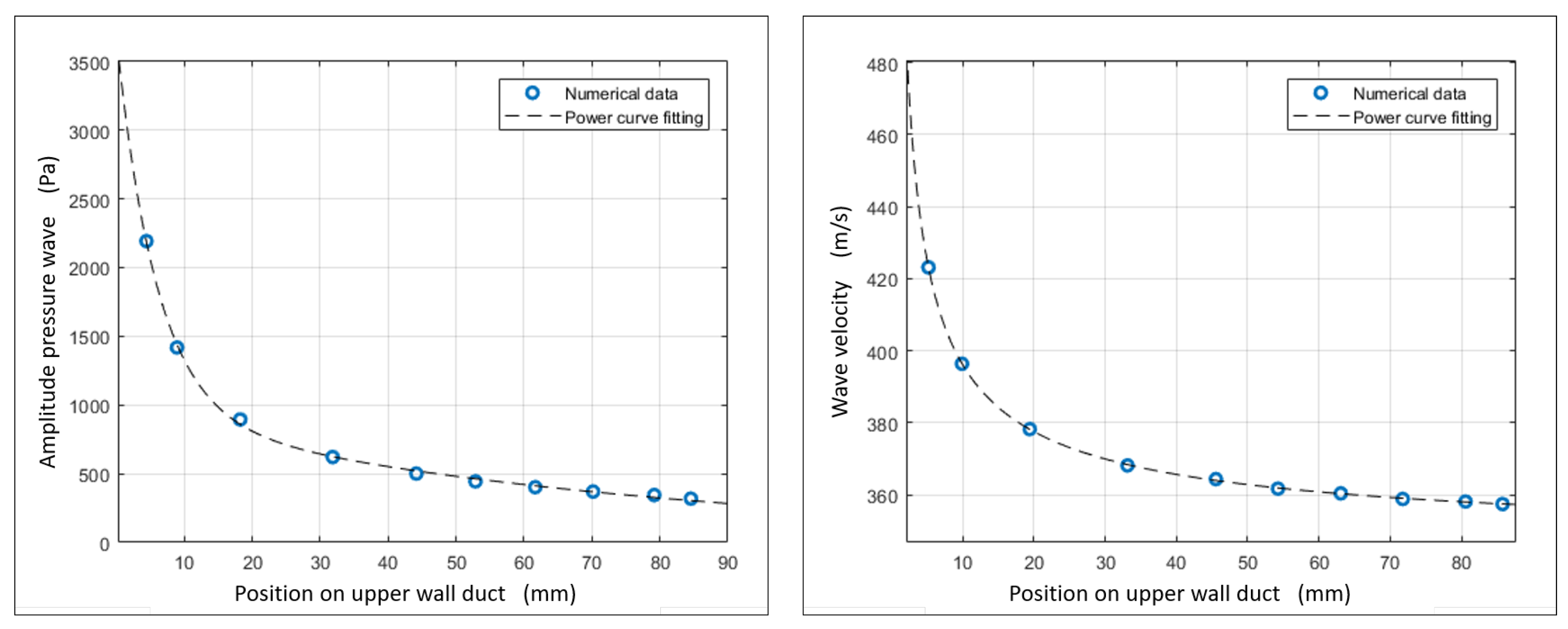
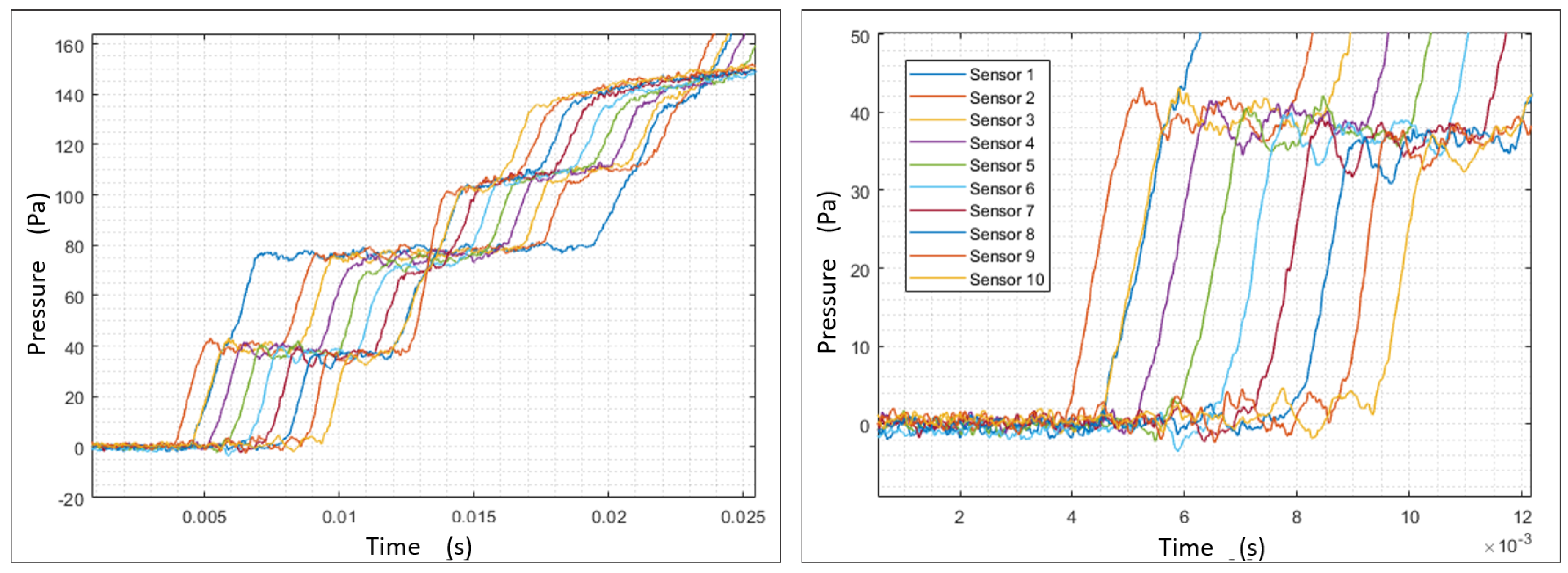
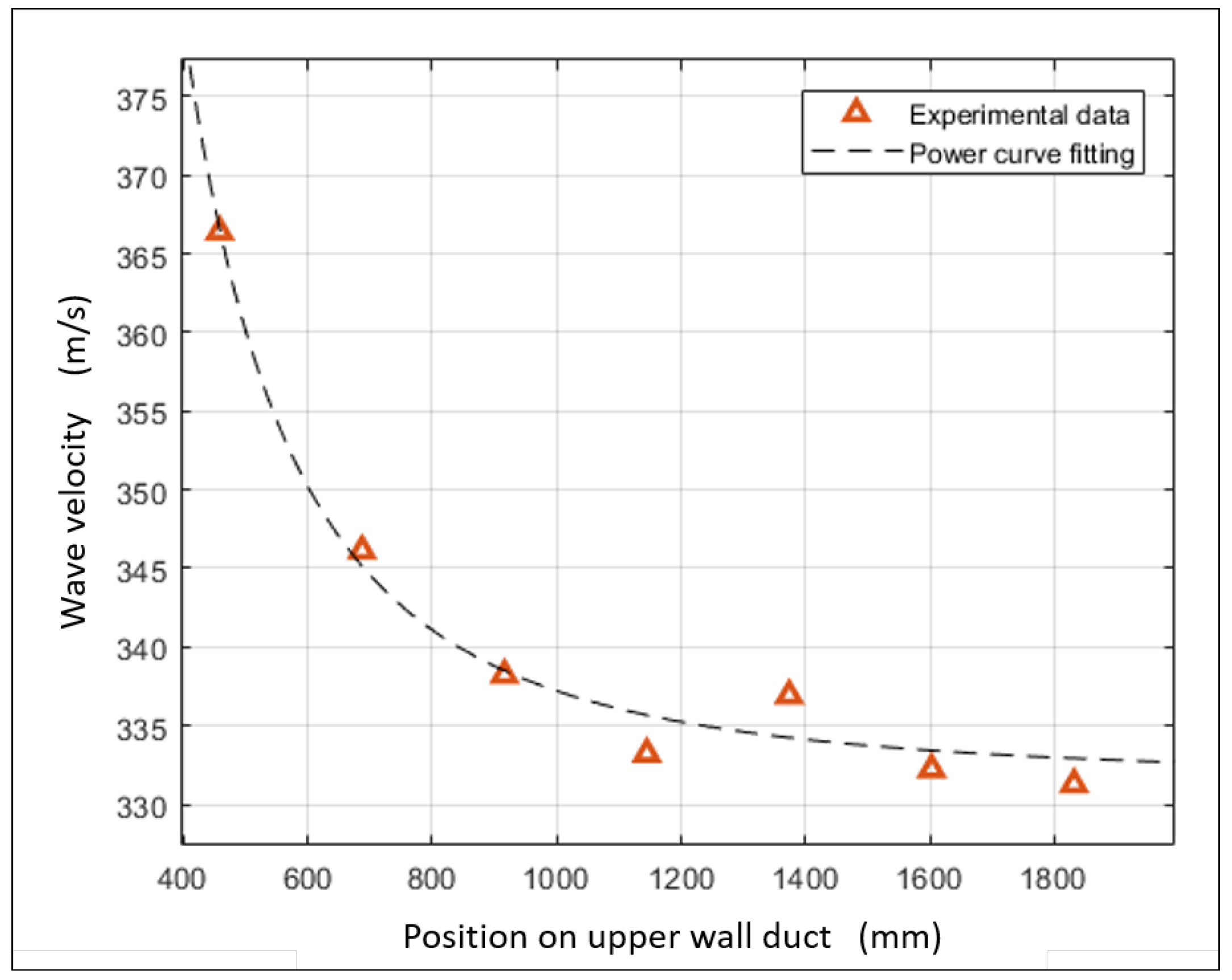
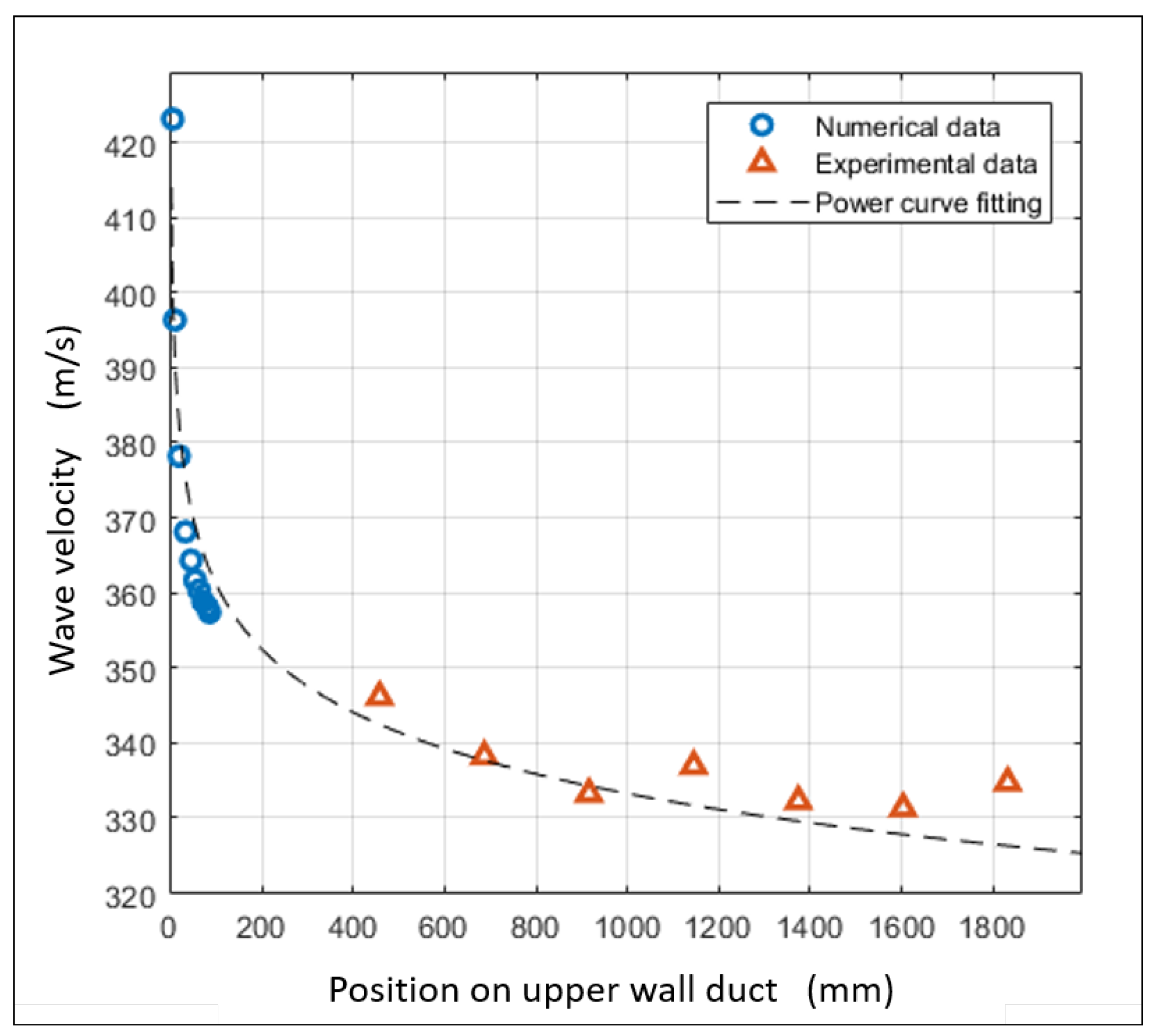
3.2. Results: Shock Wave Pressure Jump Observation
4. Conclusions
5. Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gorelik, M. Additive manufacturing in the context of structural integrity. Int. J. Fatigue 2017, 94, 168–177. [Google Scholar] [CrossRef]
- Molaeia, R.; Fatemi, A. Fatigue Design with Additive Manufactured Metals: Issues to Consider and Perspective for Future Research. In Proceedings of the 7th International Conference on Fatigue Design, Senlis, France, 29–30 November 2017. [Google Scholar]
- Lia, C.; Liua, Z.Y.; Fangb, X.Y.; Guo, Y.B. Residual Stress in Metal Additive Manufacturing. In Proceedings of the 4th CIRP Conference on Surface Integrity, Tianjin, China, 11–13 July 2018. [Google Scholar]
- Hou, Q.; Jiao, W.; Ren, L.; Cao, H.; Song, G. Experimental study of leakage detection of natural gas pipeline using FBG based strain sensor and least square support vector machine. J. Loss Prev. Process Ind. 2014, 32, 144–151. [Google Scholar] [CrossRef]
- Boller, C.; Meyendorf, N. State-of-the-Art in Structural Health Monitoring for Aeronautics. In Proceedings of the International Symposium on NDT in Aerospace, Fürth/Bavaria, Germany, 3–5 December 2008. [Google Scholar]
- Ciang, C.C.; Lee, J.R.; Bang, H.J. Structural health monitoring for a wind turbine system: A review of damage detection methods. Meas. Sci. Technol. 2008, 19, 122001. [Google Scholar] [CrossRef]
- Kessler, S.S.; Amaratung, K.; Wardle, B.L. An assessment of Durability Requirements for Aircraft Structural Health Monitoring Sensors. In Proceedings of the 5th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 12–14 September 2005; pp. 812–819, ISBN 1-932078-51-7. [Google Scholar]
- Speckmann, H.; Henrich, R. Structural Health Monitoring (SHM)—Overview on technologies under development. In Proceedings of the 6th WCNDT 2004—World Conference on NDT, Montreal, QC, Canada, 30 August–3 September 2004. [Google Scholar]
- De Baere, D.; Stranza, M.; Hinderdael, M.; Devesse, W.; Guillaume, P. Effective Structural Health Monitoring with Additive Manufacturing. In Proceedings of the EWSHM 7th European Workshop on Structural Health Monitoring, La Cité, Nantes, France, 8–11 July 2014. [Google Scholar]
- Hinderdael, M.; de Baere, D.; Guillaume, P. Proof of Concept of Crack Localization using Negative Pressure Waves in closed tubes for later application in effective SHM system for Additive Manufactured Components. Appl. Sci. 2016, 10, 33. [Google Scholar] [CrossRef]
- Hinderdael, M.; Jardon, Z.; de Baere, D.; Devesse, W.; Guillaume, P. Negative Pressure Wave Amplitude: A Theoretical Model Empirically Validated. J. Hazard. Mater. 2007, submitted. [Google Scholar]
- Mirshekari, G.; Brouillette, M. One-dimensional model for microscale shock tube flow. Shock Waves 2009, 19, 25–38. [Google Scholar] [CrossRef]
- Liang, W.; Zhang, L.; Wang, Z. State of research on negative pressure techniques applied to leak detection in liquid pipelines. In Proceedings of the International Pipeline Conference, Volumes 1, 2, and 3, Calgary, AB, Canada, 4–8 October 2004. [Google Scholar] [CrossRef]
- Silva, R.; Buiatti, C.M.; Cruz, S.L.; Pereira, J.A.F.R. Pressure wave behaviour and leak detection in pipelines. Comput. Chem. Eng. 1996, 20 (Suppl. 1), S491–S496. [Google Scholar] [CrossRef]
- Ben-Dor, G.; Igra, O.; Elperin, T. Volume 2: Shock wave interactions and propagation. In Handbook of Shock Waves; Academic Press: Cambridge, MA, USA, 2000; ISBN-13 978-0120864300. [Google Scholar]
- Gaetani, P.; Guardone, A.; Persico, G. Shock tubes flows past partially opened diaphragms. J. Fluid Mech. 2008, 602, 267–286. [Google Scholar] [CrossRef]
- Parisse, J.D.; Giordano, J.; Perrier, P.; Burtschell, Y.; Graur, I.A. Numerical investigation of micro shock waves generation. Microfluid. Nanofluid. 2009, 6, 699–709. [Google Scholar] [CrossRef]
- Liepmann, H.W.; Roshko, A. Elements of Gasdynamics; Dover Publications Inc.: Mineola, NY, USA, 2002; ISBN-13 978-0486419633. [Google Scholar]
- Zeitoun, D.E.; Burtschell, Y.; Graur, I.A.; Ivanov, M.S.; Kudryavtsev, A.N.; Bondar, Y.A. Numerical simulation of shock wave propagation in microchannels using continuum and kinetic approaches. Shock Waves 2009, 19, 307–316. [Google Scholar] [CrossRef]
- Ngomo, D.; Chaudhuri, A.; Chinnayya, A.; Hadjadj, A. Numerical study of shock propagation and attenuation in narrow tubes including friction and heat losses. Comput. Fluids 2010, 39, 1711–1721. [Google Scholar] [CrossRef]
- Murvay, P.S.; Silea, I. A survey on gas leak detection and localization techniques. J. Loss Prev. Process Ind. 2012, 25, 966–973. [Google Scholar] [CrossRef]
- Rocha, M.S. Acoustic Monitoring of Pipeline Leaks; ISA: Amsterdam, The Netherlands; London, UK, 1989; pp. 283–290, no. 89-0333. [Google Scholar]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jardon, Z.; Hinderdael, M.; Regert, T.; Van Beeck, J.; Guillaume, P. On the Nature of Pressure Wave Propagation through Ducts for Structural Health Monitoring Application. Appl. Sci. 2019, 9, 837. https://doi.org/10.3390/app9050837
Jardon Z, Hinderdael M, Regert T, Van Beeck J, Guillaume P. On the Nature of Pressure Wave Propagation through Ducts for Structural Health Monitoring Application. Applied Sciences. 2019; 9(5):837. https://doi.org/10.3390/app9050837
Chicago/Turabian StyleJardon, Zoé, Michaël Hinderdael, Tamas Regert, Jeroen Van Beeck, and Patrick Guillaume. 2019. "On the Nature of Pressure Wave Propagation through Ducts for Structural Health Monitoring Application" Applied Sciences 9, no. 5: 837. https://doi.org/10.3390/app9050837
APA StyleJardon, Z., Hinderdael, M., Regert, T., Van Beeck, J., & Guillaume, P. (2019). On the Nature of Pressure Wave Propagation through Ducts for Structural Health Monitoring Application. Applied Sciences, 9(5), 837. https://doi.org/10.3390/app9050837