Dynamic Behavior of an Embedded Foundation under Horizontal Vibration in a Poroelastic Half-Space




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Definition and Governing Equations
2.1. Problem Statement
2.2. Governing Equations of Poroelastic Soil
2.3. General Solutions of Horizontal Vibration of Embedded Foundation
2.3.1. Reaction Force at the Side of the Embedded Foundation
2.3.2. Reaction Force at the Base of the Embedded Foundation
- , ,
2.4. Dynamic Response of Embedded Foundation under Horizontal Vibration
3. Results and Discussion
3.1. Verification of the Analytical Solutions with Existing Results
3.1.1. Verification of the Base of the Embedded Foundation
3.1.2. Verification of the Side of the Embedded Foundation
- (1)
- The ratio of embedment over foundation radius, that is, L/R from 0 to two.
- (2)
- The effect of the mass ratio (the variation of foundation mass) from one to four.
- (3)
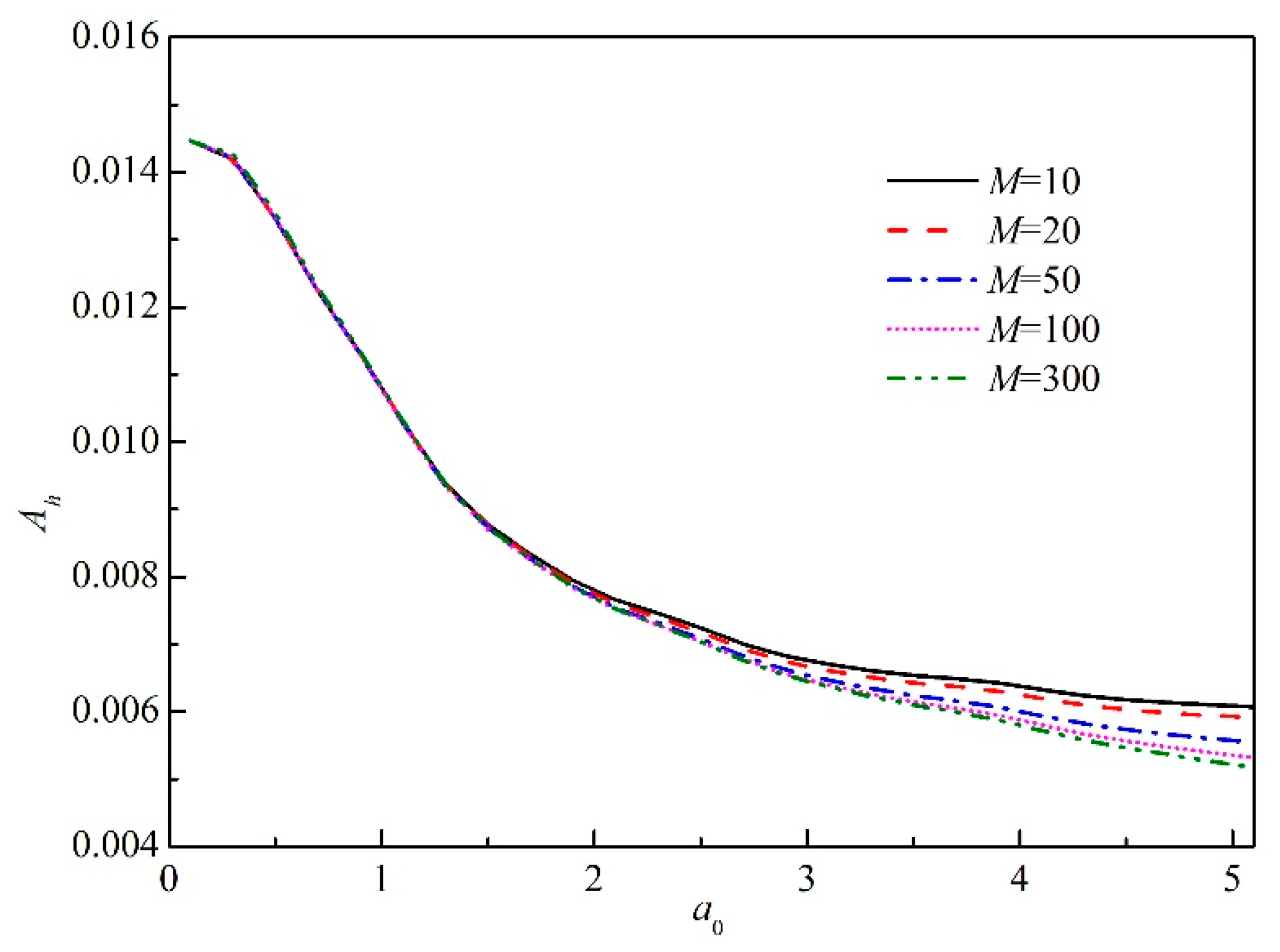
- The effect of poroelastic material property M from 10 to 300.
- (4)
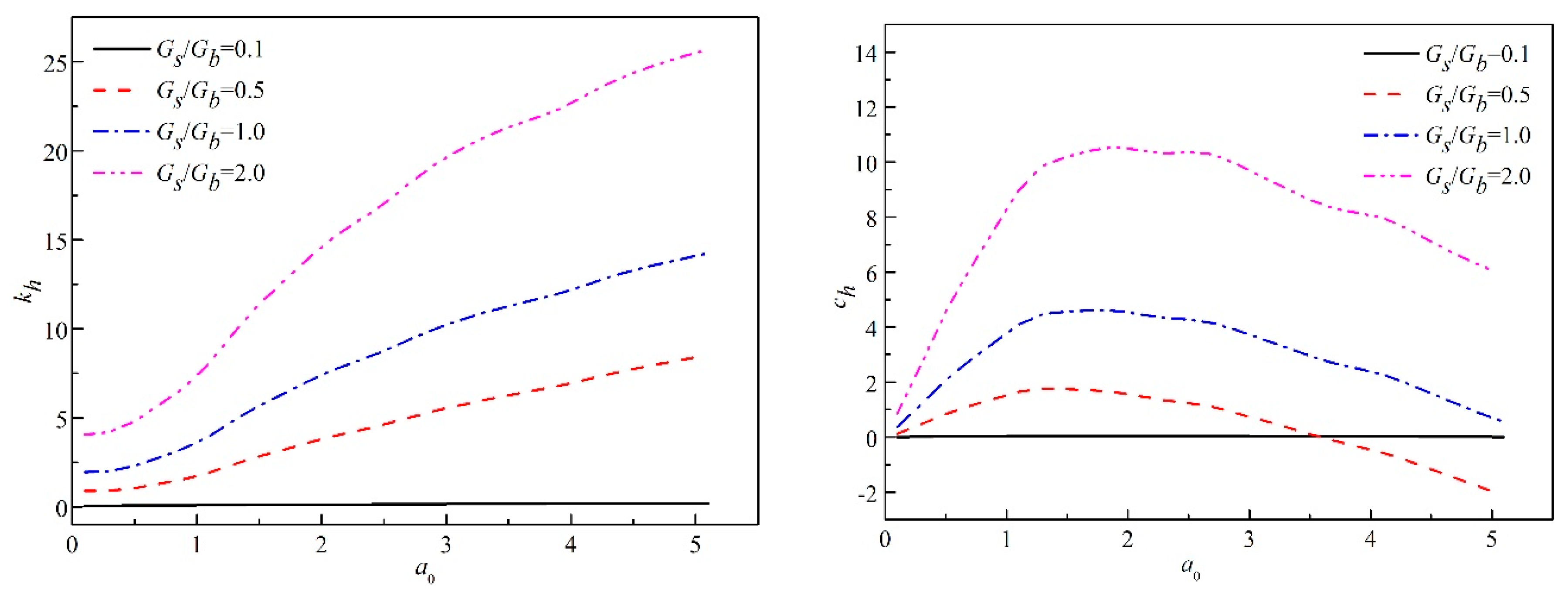
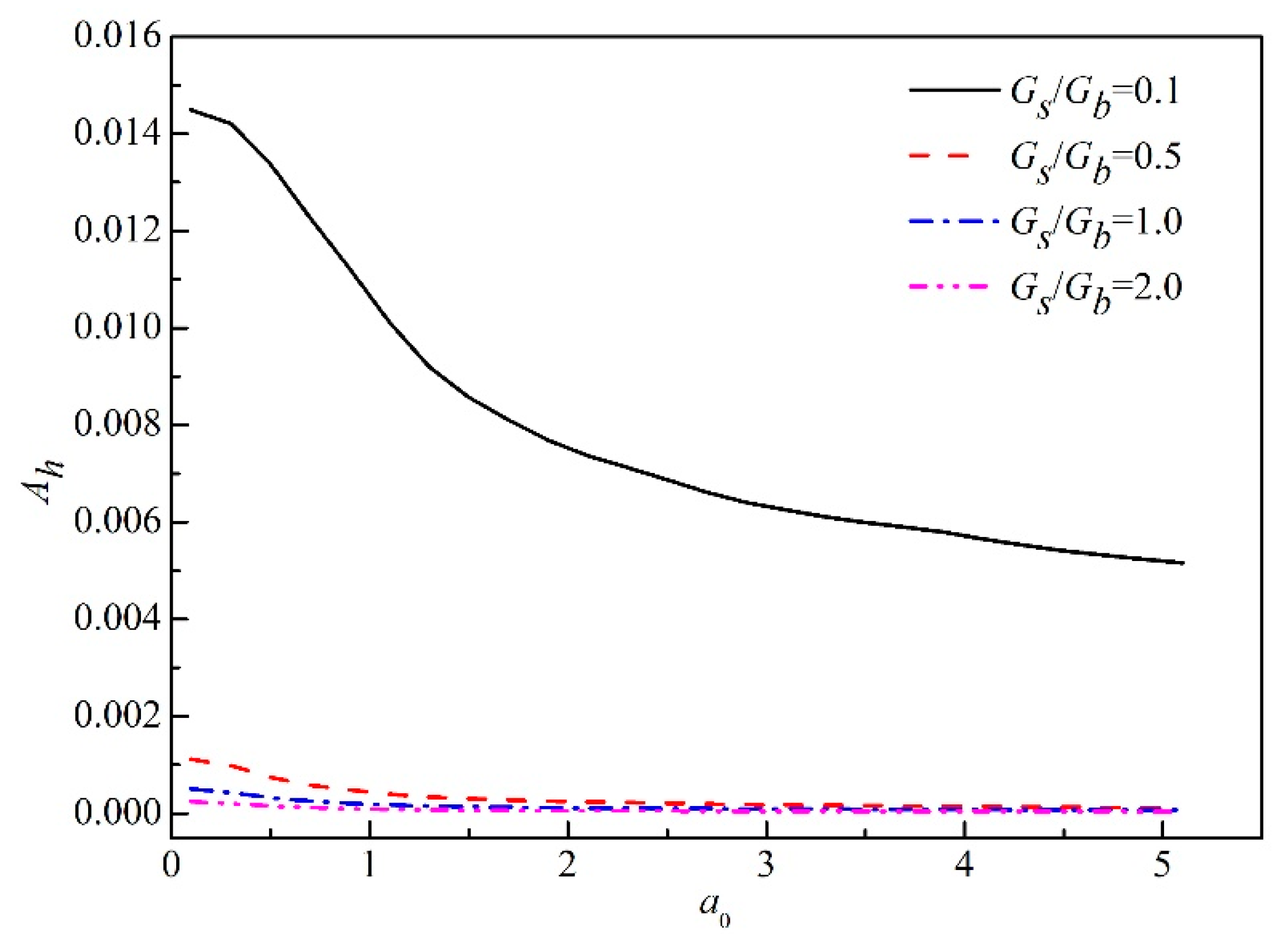
- The relative stiffness of the soil layer around the foundation and under the foundation, that is, Gs/Gb from 0.1 to two.
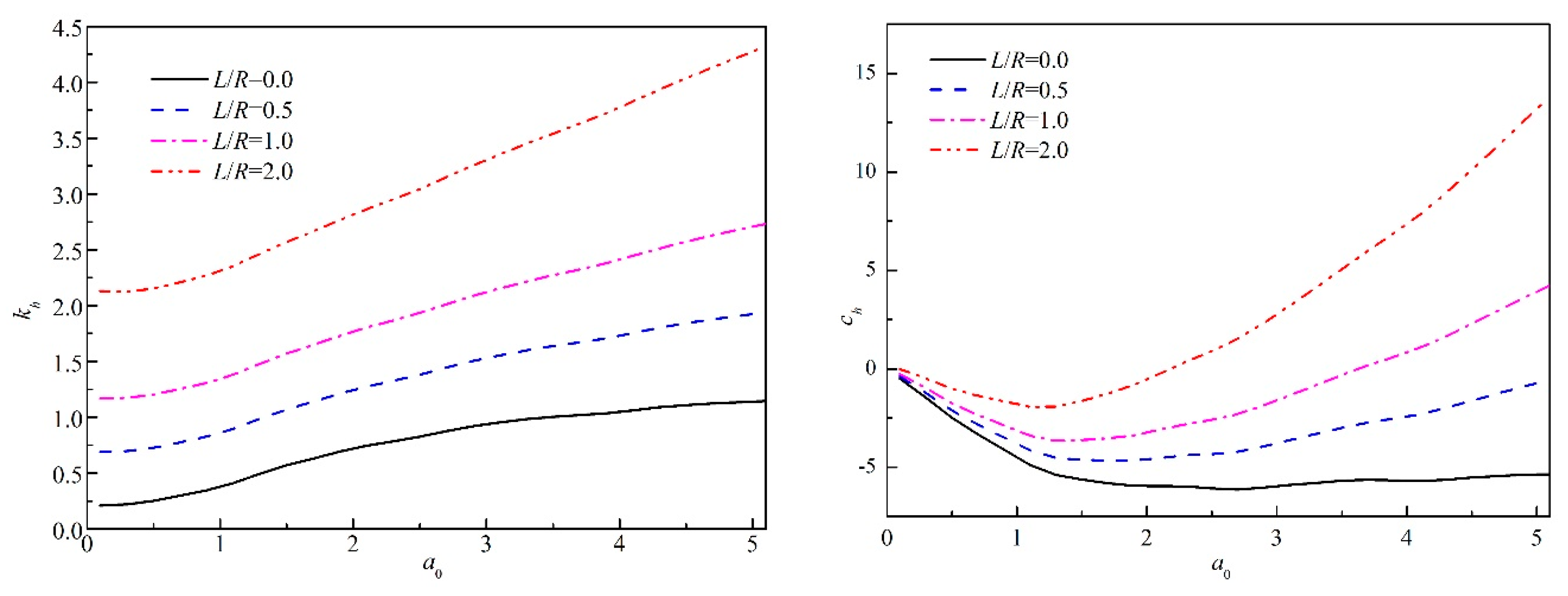
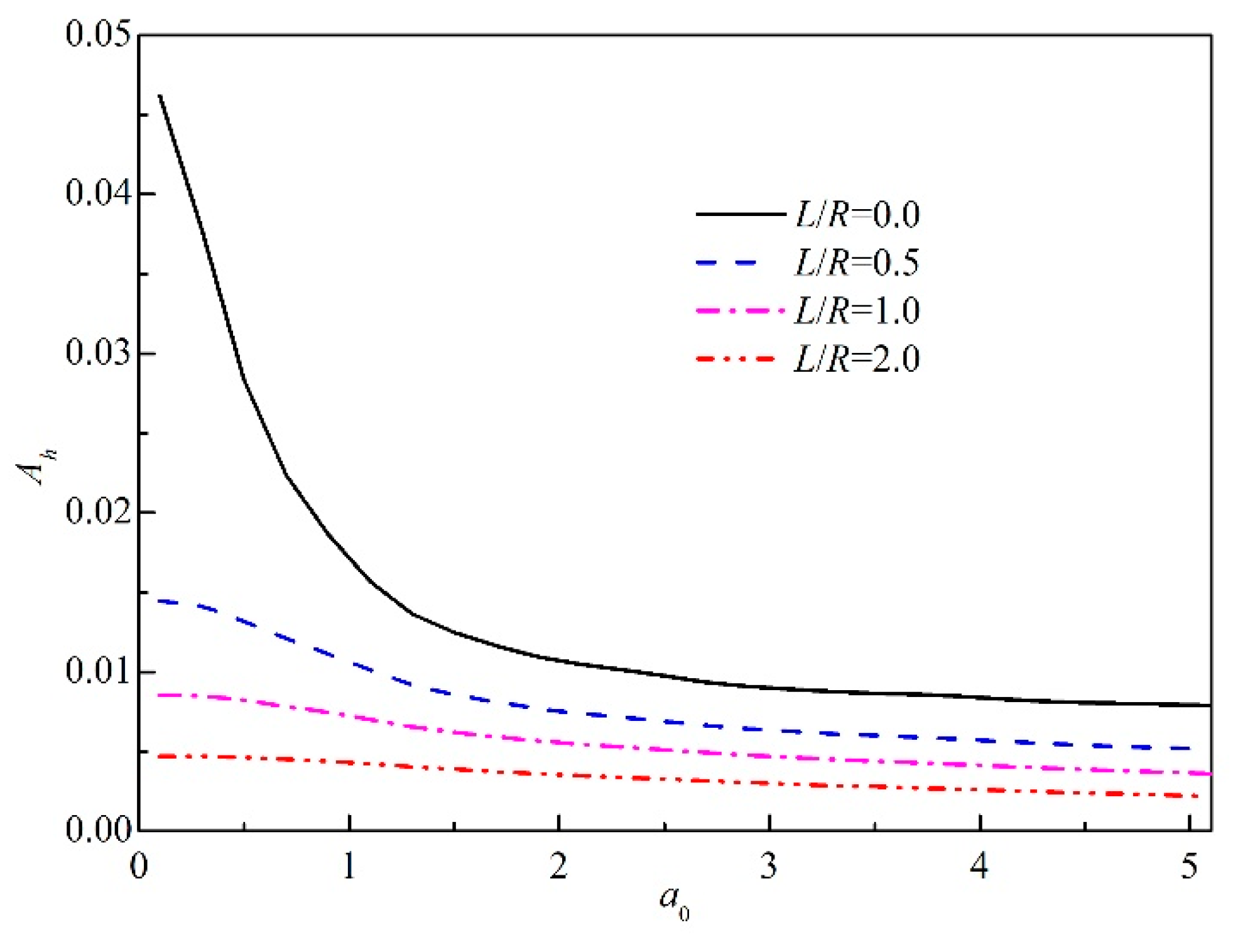
3.2. Effect of the Footing Embedment Ratio
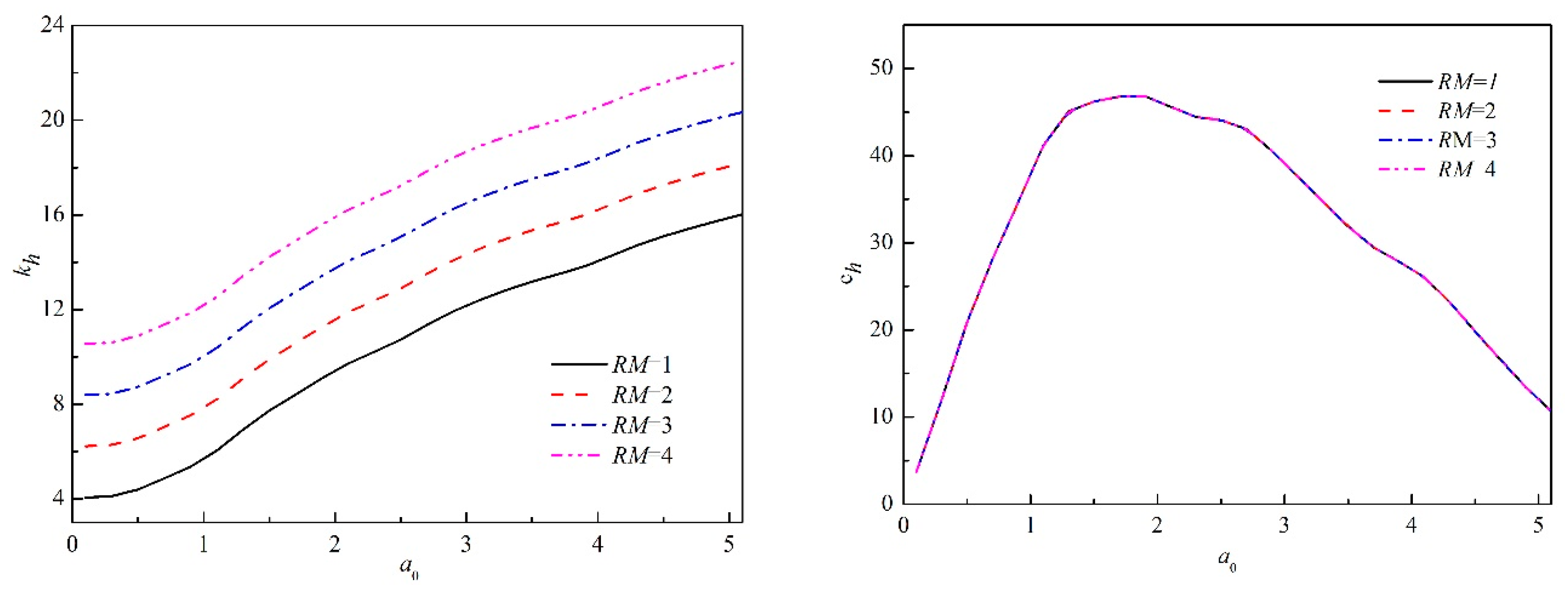
3.3. Effect of the Footing Mass Ratio
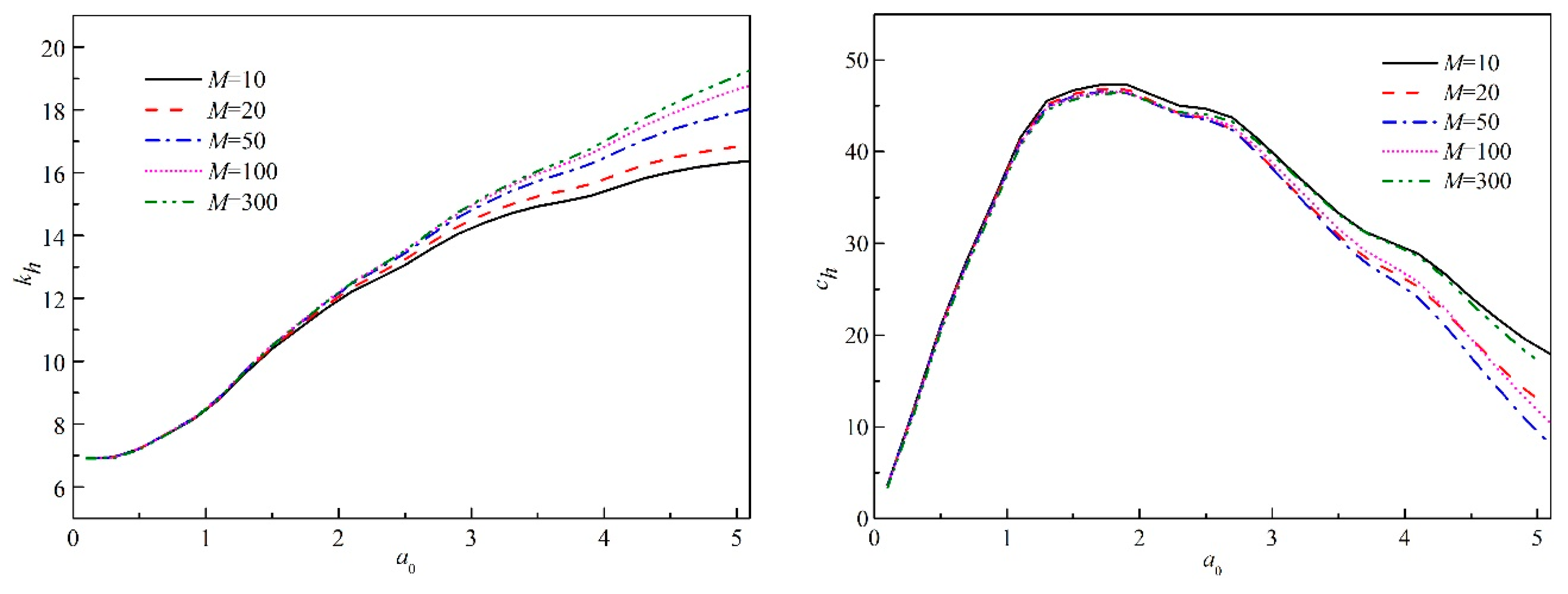
3.4. Effect of Poroelastic Material Parameters
3.5. Effect of the Relative Stiffness
4. Conclusions
- (1)
- Results illustrated in this paper show that the embedment ratio of the foundation, mass ratio of the foundation, relative stiffness, and poroelastic properties of the backfill has a significant influence on the horizontal dynamic response of embedded foundation for the frequency range of 0 ≤ a0 ≤ 5.
- (2)
- The horizontal dynamic impedance of embedded foundation increases while the dynamic response factor decreases with the increasing embedment ratio. There’s an increase in dynamic impedance and a decrease in dynamic response factor with the increasing frequency.
- (3)
- It should be noted that the real part of dynamic impedance increases with the increasing mass ratio while the imaginary part is independent of the mass ratio. The dynamic response factor decreases with increasing mass ratio. An increase in the dynamic impedance and a decrease in the dynamic response factor are described with the increasing frequency.
- (4)
- By increasing the poroelastic material properties, the real part of dynamic impedance increases while the imaginary part, as well as the dynamic response factor, decreases. The larger the frequency, the larger is the dynamic impedance and the smaller the dynamic response factor.
- (5)
- The dynamic impedance increases significantly, especially for a frequency smaller than 1.5. The real part keeps increasing while the imaginary part decreases when the frequency is larger than 1.5. A considerable decrease in the dynamic response factor is noted due to the presence of relative backfill modulus. The effect of Poisson’s ratio v on the horizontal dynamic impedance of embedded foundation can be ignored.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Latini, C.; Zania, V. Dynamic lateral response of suction caissons. Soil Dyn. Earthq. Eng. 2017, 100, 59–71. [Google Scholar] [CrossRef]
- Eskandari-Ghadi, M.; Fallahi, M.; Ardeshir-Behrestaghi, A. Forced vertical vibration of rigid circular disc on a transversely isotropic half-space. J. Eng. Mech. 2009, 136, 913–922. [Google Scholar] [CrossRef]
- Reissner, E.; Sagoci, H.F. Forced torsional oscillations of an elastic half-space. Int. J. Appl. Phys. 1944, 15, 652–654. [Google Scholar] [CrossRef]
- Apsel, R.J.; Luco, J.E. Impedance functions for foundations embedded in a layered medium: An integral equation approach. Earthq. Eng. Struct. Dyn. 1987, 15, 213–231. [Google Scholar] [CrossRef]
- Ahmad, S.; Rupani, A.K. Horizontal impedance of square foundation in layered soil. Soil Dyn. Earthq. Eng. 1999, 18, 59–69. [Google Scholar] [CrossRef]
- Rajapakse, R.K.N.D.; Wang, Y. Elastodynamic Green’s functions of orthotropic half plane. J. Eng. Mech. 1991, 117, 588–604. [Google Scholar] [CrossRef]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 12, 155–164. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. II. Higher frequency range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Halpern, M.R.; Christiano, P. Steady-state harmonic response of a rigid plate bearing on a liquid-saturated poroelastic halfspace. Earthq. Eng. Struct. Dyn. 1986, 14, 439–454. [Google Scholar] [CrossRef]
- Pak, R.Y.S.; Saphores, J.D. Rocking rotation of a rigid disc in a half-space. Int. J. Solids Struct. 1991, 28, 389–401. [Google Scholar] [CrossRef]
- Dargush, G.F.; Chopra, M.B. Dynamic analysis of axisymmetric foundations on poroelastic media. J. Eng. Mech. 1996, 122, 623–632. [Google Scholar] [CrossRef]
- Jin, B.; Zhou, D.; Zhong, Z. Lateral dynamic compliance of pile embedded in poroelastic half space. Soil Dyn. Earthq. Eng. 2001, 21, 519–525. [Google Scholar] [CrossRef]
- He, R.; Wang, L.Z. Horizontal vibration of a rigid disk buried in a poroelastic half-space in contact with a fluid half-space. Soil Dyn. Earthq. Eng. 2013, 44, 38–41. [Google Scholar] [CrossRef]
- Ni, P.; Song, L.; Mei, G.; Zhao, Y. Predicting excavation-induced settlement for embedded footing: Case study. Int. J. Geomech. 2018, 18, 05018001. [Google Scholar] [CrossRef]
- Rizzo, F.J.; Shippy, D.J.; Rezayat, M. Boundary Integral Equation Analysis for a Class of Earth-Structure Interaction Problems; Department of Engineering Mechanics, College of Engineering, University of Kentucky: Kentucky, OH, USA, 1985. [Google Scholar]
- Senjuntichai, T.; Sapsathiarn, Y. Forced vertical vibration of circular plate in multilayered poroelastic medium. J. Eng. Mech. 2003, 129, 1330–1341. [Google Scholar] [CrossRef]
- Chen, S.L.; Chen, L.Z.; Pan, E. Three-dimensional time-harmonic Green’s functions of saturated soil under buried loading. Soil Dyn. Earthq. Eng. 2007, 27, 448–462. [Google Scholar] [CrossRef]
- Senjuntichai, T.; Mani, S.; Rajapakse, R.K.N.D. Vertical vibration of an embedded rigid foundation in a poroelastic soil. Soil Dyn. Earthq. Eng. 2006, 26, 626–636. [Google Scholar] [CrossRef]
- Cai, Y.; Hu, X. Vertical vibrations of a rigid foundation embedded in a poroelastic half space. J. Eng. Mech. 2010, 136, 390–398. [Google Scholar] [CrossRef]
- Cai, Y.Q.; Hu, X.Q.; Xu, C.J.; Hong, Z.S. Vertical dynamic response of a rigid foundation embedded in a poroelastic soil layer. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 1363–1388. [Google Scholar] [CrossRef]
- Bilotta, E.; De Sanctis, L.; Di Laora, R.; D’Onofrio, A.; Silvesti, F. Importance of seismic site response and soil–structure interaction in dynamic behaviour of a tall building. Géotechnique 2015, 65, 391–400. [Google Scholar] [CrossRef]
- Fabozzi, S.; Bilotta, E.; Picozzi, M.; Zollo, A. Feasibility study of a loss-driven earthquake early warning and rapid response systems for tunnels of the Italian high-speed railway network. Soil Dyn. Earthq. Eng. 2018, 112, 232–242. [Google Scholar] [CrossRef]
- Di Laora, R.; Grossi, Y.; De Sancist, L.; Viggiani, G.M.B. An analytical solution for the rotational component of the Foundation Input Motion induced by a pile group. Soil Dyn. Earthq. Eng. 2017, 97, 424–438. [Google Scholar] [CrossRef]
- Novak, M. Dynamic stiffness and damping of piles. Can. Geotech. J. 1974, 11, 574–598. [Google Scholar] [CrossRef]
- Beredugo, Y.O.; Novak, M. Coupled horizontal and rocking vibration of embedded footings. Can. Geotech. J. 1972, 9, 477–497. [Google Scholar] [CrossRef]
- Yu, J. Theoretical Analysis and Test Research on Saturated Soil-Pile-Structure Dynamic Interaction; Central South University: Changsha, China, 2007. [Google Scholar]
- Noble, B. The Solution of Bessel Function Dual Integral Equations by a Multiplying-Factor Method. In Mathematical Proceedings of the Cambridge Philosophical Society; No. 2; Cambridge University Press: Cambridge, UK, 1963; Volume 59, pp. 351–362. [Google Scholar]
- Pak, R.Y.S.; Saphores, J.-D.M. Lateral translation of a rigid disk in a semi-infinite solid. Quart. J. Mech. Appl. Math. 1992, 45, 435–449. [Google Scholar] [CrossRef]
- Lysmer, J.; Richart, F.E. Dynamic response of footings to vertical loading. J. Soil Mech. Found. Div. 1966, 921, 65–91. [Google Scholar]
- Lysmer, J.; Kuhlemeyer, R.L. Finite dynamic model for infinite media. J. Eng. Mech. Div. 1969, 95, 859–878. [Google Scholar]
- Jin, B.; Liu, H. Horizontal vibrations of a disk on a poroelastic half-space. Soil Dyn. Earthq. Eng. 2000, 19, 269–275. [Google Scholar] [CrossRef]
- Nogami, T.; Chen, H.S. Dynamic soil stiffnesses at side of embedded structures with rectangular base. J. Eng. Mech. 2003, 129, 963–973. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhao, W.; Jia, P.; Han, J.; Guan, Y. Dynamic Behavior of an Embedded Foundation under Horizontal Vibration in a Poroelastic Half-Space. Appl. Sci. 2019, 9, 740. https://doi.org/10.3390/app9040740
Chen Y, Zhao W, Jia P, Han J, Guan Y. Dynamic Behavior of an Embedded Foundation under Horizontal Vibration in a Poroelastic Half-Space. Applied Sciences. 2019; 9(4):740. https://doi.org/10.3390/app9040740
Chicago/Turabian StyleChen, Yang, Wen Zhao, Pengjiao Jia, Jianyong Han, and Yongping Guan. 2019. "Dynamic Behavior of an Embedded Foundation under Horizontal Vibration in a Poroelastic Half-Space" Applied Sciences 9, no. 4: 740. https://doi.org/10.3390/app9040740
APA StyleChen, Y., Zhao, W., Jia, P., Han, J., & Guan, Y. (2019). Dynamic Behavior of an Embedded Foundation under Horizontal Vibration in a Poroelastic Half-Space. Applied Sciences, 9(4), 740. https://doi.org/10.3390/app9040740