Validation of All-Sky Imager Technology and Solar Irradiance Forecasting at Three Locations: NREL, San Antonio, Texas, and the Canary Islands, Spain

 ,
, 
Abstract
Featured Application
Abstract
1. Introduction
1.1. Day-Ahead GHI Forecasting
1.2. Intra-Hour Solar Forecasting
State of the Art in Solar Forecasting
1.3. Climatology and Microgrid Architectures at the Three Locations
1.3.1 SkyImager at National Renewable Energy Laboratory in Golden, CO
1.3.2. SkyImager at San Antonio, TX, USA
1.3.3. SkyImager in the Canary Islands
2. Materials and Methods
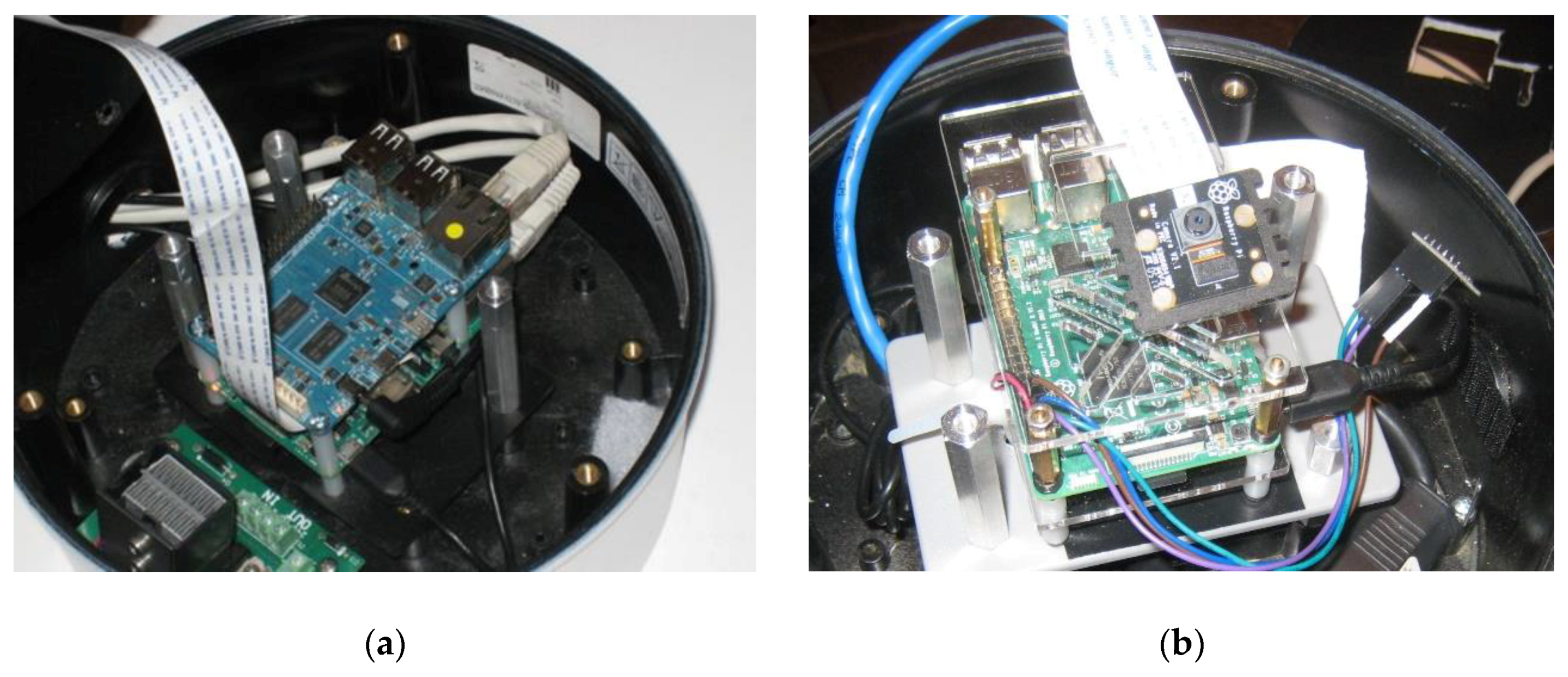
2.1. SkyImager Hardware
2.2. Image Processing Pipeline
2.3. Machine Learning for Irradiance Forecasting
2.4. Stereographic Method for CBH Estimation
3. Results
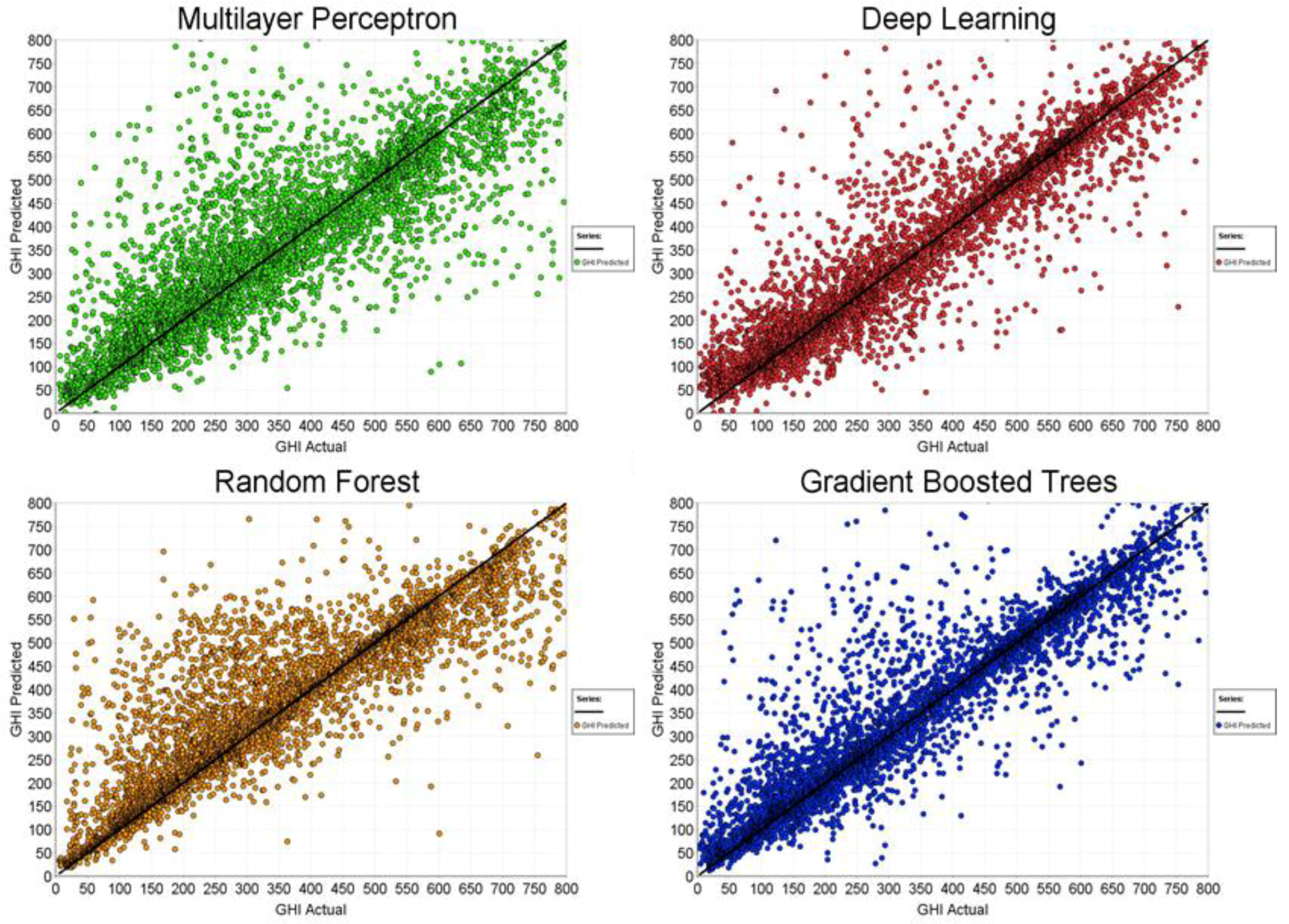
3.1. Comparing 4 Different ML Models
3.2. Different Deep Learning Model Results
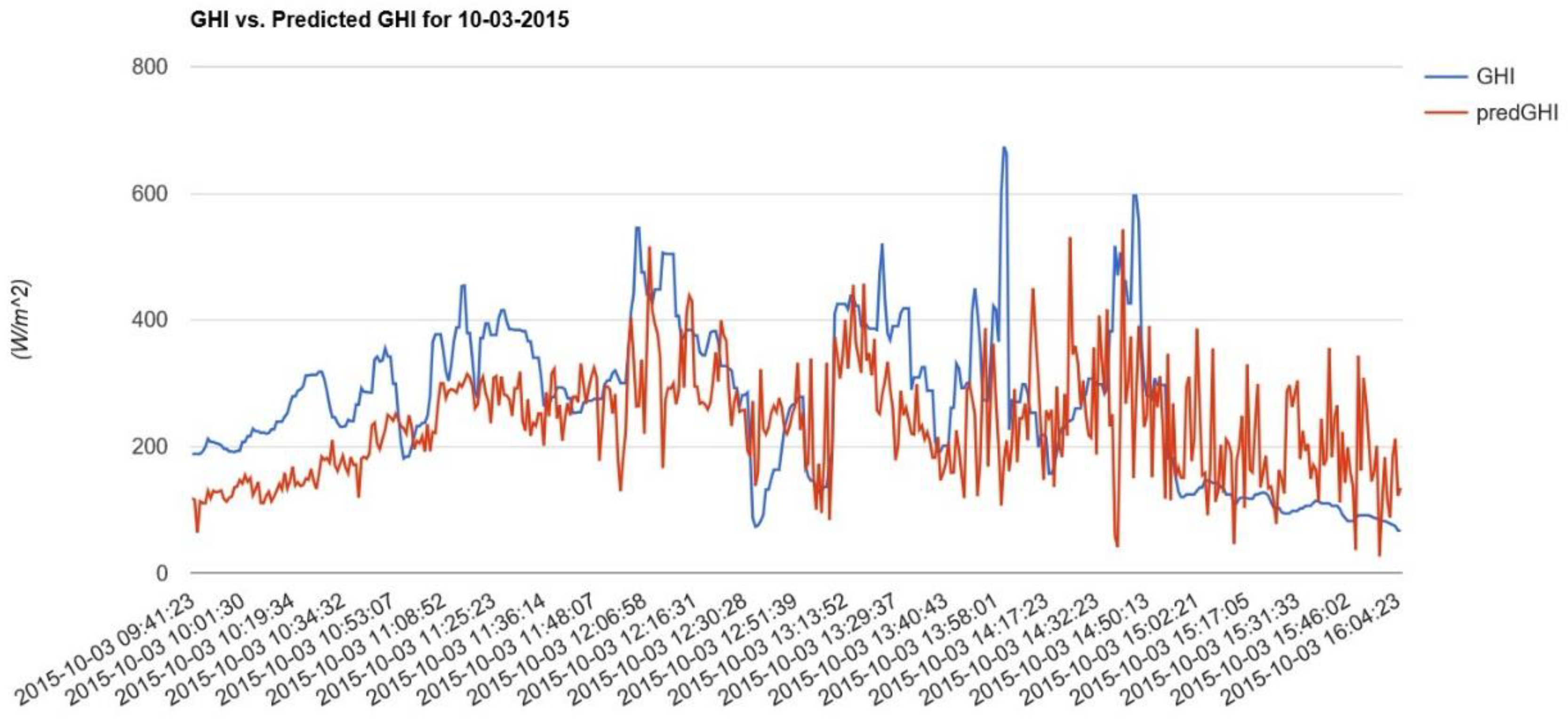
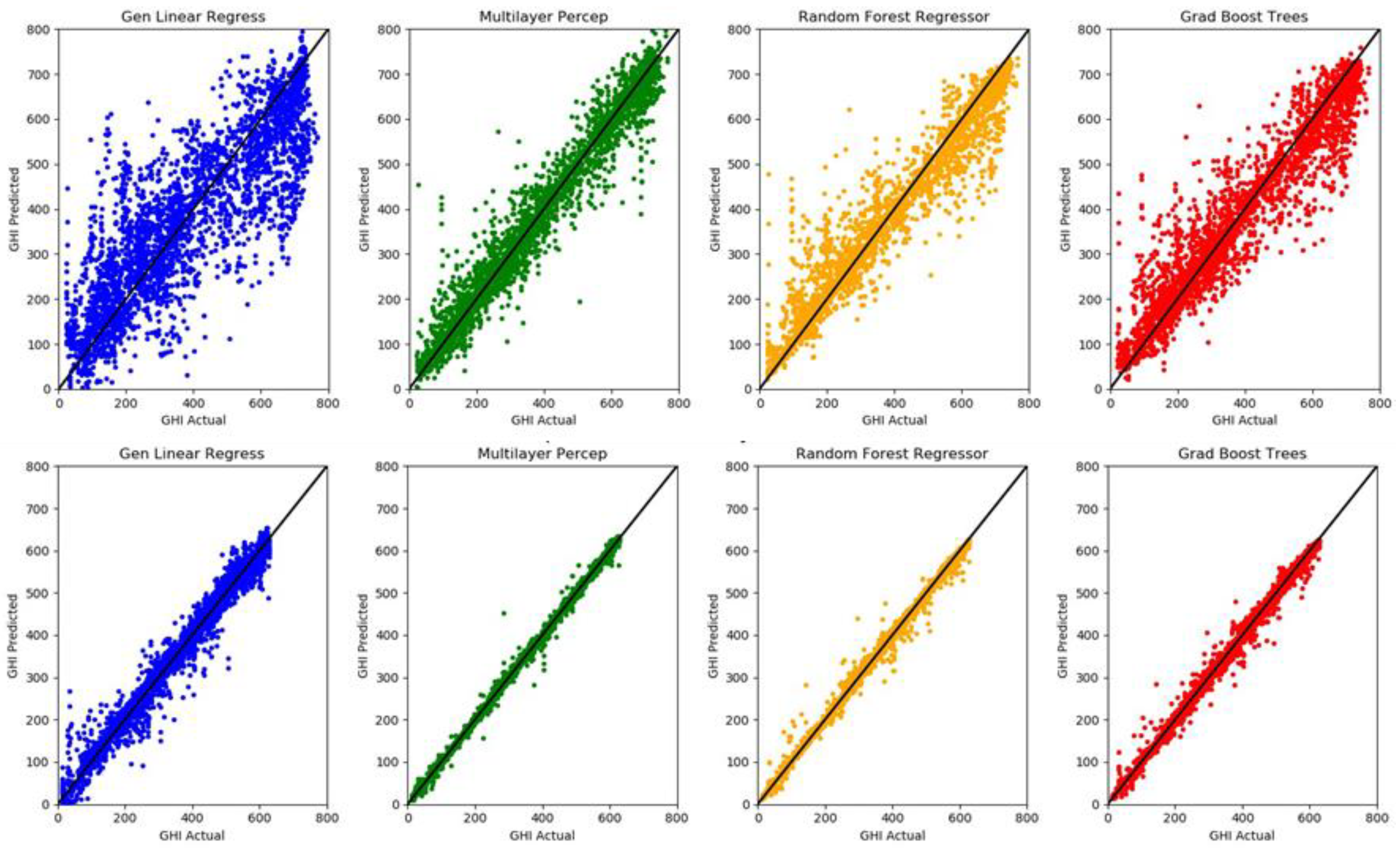
3.3. Cloudy Versus Clear Sky Days
3.4. JBSA Microgrid Data
3.5. One Second Minimodule Data from La Graciosa
3.6. CBH Estimations
4. Discussion
4.1. Lessons Learned at the 3 Deployment Locations
4.1.1. SkyImager at NREL
4.1.2. SkyImager at San Antonio, TX, USA
4.1.3. SkyImager at La Graciosa, Canary Islands
5. Conclusions
6. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guerrero-Lemus, R.; Shephard, L. Low Carbon Energy in Africa and Latin America: Renewable Technologies, Natural Gas and Nuclear Energy (Lecture Notes in Energy), 1st ed.; Springer: Berlin, Germany, 2017. [Google Scholar]
- Available online: https://uc-ciee.org/downloads/appendixA.pdf (accessed on 16 February 2019).
- Janssen, T.; Krishnaswami, H. Voltage and Current Control of a Multi-port NPC Inverter Configuration for a Grid-Connected Photovoltaic System. In Proceedings of the IEEE 17th Workshop on Control and Modeling for Power Electronics, Trondheim, Norway, 27–30 June 2016. [Google Scholar]
- Olivares, D.; Lara, J.; Canizares, C.; Kazerani, M. Stochastic-Predictive Energy Management System for Isolated Microgrids. IEEE Trans. Smart Grid 2015, 6, 2681–2693. [Google Scholar] [CrossRef]
- Canizares, C.; Palma-Behnke, R.; Olivares, D.; Mehrizi-Sani, A.; Etermadi, A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.; Gomis-Bellmunt, O.; Saeedifard, M.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar]
- Farzan, F.; Jafari, M.; Masiello, R.; Lu, Y. Toward Optimal Day-Ahead Scheduling and Operational Control of Microgrids Under Uncertainty. IEEE Trans. Smart Grid 2015, 6, 499–507. [Google Scholar] [CrossRef]
- Michaelson, D.; Mahmood, H.; Jiang, J. A Predictive Energy Management System Using Pre-Emptive Load Shedding for Islanded Photovoltaic Microgrids. IEEE Trans. Ind. Electron. 2017, 64, 5440–5448. [Google Scholar] [CrossRef]
- Jr, W.R.; Krishnaswami, H.; Vega, R.; Cervantes, M. A low cost, edge computing, all-sky imager for cloud tracking and intra-hour irradiance forecasting. Sustainability 2017, 12, 482. [Google Scholar]
- Moncada, A.; Richardson, W., Jr.; Vega-Avila, R. Deep Learning to Forecast Solar Irradiance Using a Six-Month UTSA SkyImager Dataset. Energies 2018, 11, 1988. [Google Scholar] [CrossRef]
- Nummikoski, J.; Manjili, Y.S.; Vega, R.; Krishnaswami, H. Adaptive Rule Generation for Solar Forecasting: Interfacing with A Knowledge-Base Library. In Proceedings of the IEEE 39th Photovoltaic Specialists Conference (PVSC), Tampa, FL, USA, 16–21 June 2013. [Google Scholar]
- Cervantes, M.; Krishnaswami, H.; Richardson, W.; Vega, R. Utilization of Low Cost, Sky-Imaging Technology for Irradiance Forecasting of Distributed Solar Generation. In Proceedings of the IEEE GreenTech Conference, Kansas City, MO, USA, 6–8 April 2016. [Google Scholar] [CrossRef]
- Cañadillas, D.; Richardson, W., Jr.; González-Díaz, B.; Shephard, L.; Guerrero-Lemus, R. First Results of a Low Cost All-Sky Imager for Cloud Tracking and Intra-Hour Irradiance Forecasting serving a PV-based Smart Grid in La Graciosa Island. In Proceedings of the IEEE PVSC-44, Washington, DC, USA, 25 June 2017. [Google Scholar]
- Richardson, W.; Krishnaswami, H.; Shephard, L.; Vega, R. Machine Learning versus Ray-Tracing to Forecast Irradiance for an Edge-Computing SkyImager. In Proceedings of the 19th International Conference on Intelligent System Application to Power Systems (ISAP), San Antonio, TX, USA, 17–20 September 2017. [Google Scholar]
- Waight, J.; Grover, S.; Laval, S.; Shephard, L.; Boston, J.; Lui, R.; Mathew, J.; Bradley, D.; Lawrence, D.; Sparkman, M.; et al. NREL Integrate: RCS -4-42326: Topic Area 3 OpenFMB Reference Architecture Demonstration Final Report, Minneapolis, 2017.
- Mathiesen, P.; Kleissl, J. Evaluation of numerical weather prediction for intra-day solar forecasting in the continental United States. Solar Energy 2011, 85, 967–977. [Google Scholar] [CrossRef]
- Available online: https://www.ncdc.noaa.gov/data-access/model-data/model-datasets/rapid-refresh-rap (accessed on 20 December 2018).
- Xia, S.; Mestas-Nuñez, A.M.; Xie, H.; Vega, R. An Evaluation of Satellite Estimates of Solar Surface Irradiance Using Ground Observations in San Antonio, Texas, USA. Remote Sens. 2017, 9, 1268. [Google Scholar] [CrossRef]
- Mueller, R.; Trentmann, J.; Träger-Chatterjee, C.; Posselt, R.; Stöckli, R. The Role of the Effective Cloud Albedo for Climate Monitoring and Analysis. Remote Sens. 2011, 3, 2305–2320. [Google Scholar] [CrossRef]
- Urbich, I.; Bendix, J.; Muller, R. A Novel Approach for the Short-Term Forecast of the Effective Cloud Albedo. Remote Sens. 2018, 10, 995. [Google Scholar] [CrossRef]
- Perez, R.; Ineichen, P.; Moore, K.; Kmiecik, M.; Chain, C.; George, R.; Vignola, F. A New Operational Model for Satellite-Derived Irradiances: Description and Validation. Solar Energy 2002, 73, 307–317. [Google Scholar] [CrossRef]
- Law, E.; Prasad, A.; Kay, M.; Taylor, R. Direct normal irradiance forecasting and its application to concentrated solar thermal output forecasting: A review. Solar Energy 2014, 108, 287–307. [Google Scholar] [CrossRef]
- Raza, M.Q.; Nadarajah, M.; Ekanayake, C. On recent advances in PV output power forecasting. Sol. Energy 2016, 136, 125–144. [Google Scholar] [CrossRef]
- Barbieri, F.; Rajakaruna, S.; Gosh, A. Very short-term photovoltaic power forecasting with cloud modeling: A review. Renew. Sustain. Energy 2017, 75, 242–263. [Google Scholar] [CrossRef]
- Antonanzas, J.; Osorio, N.; Escobar, R.; Urraca, R.; Martinez-de_Pison, F.; Antonanzas-Torres, F. Review of photovoltaic power forecasting. Solar Energy 2016, 136, 78–111. [Google Scholar] [CrossRef]
- Marquez, R.; Coimbra, C. Intra-hour DNI forecasting based on cloud tracking image analysis. Sol. Energy 2013, 91, 327–336. [Google Scholar] [CrossRef]
- Marquez, R.; Coimbra, C. Proposed Metric for Evaluation of Solar Forecasting Models. J. Sol. Energy Eng. 2013, 135, 011016. [Google Scholar] [CrossRef]
- Gohari, S.; Urquhart, B.; Yang, H.; Kurtz, B.; Nguyen, D.; Chow, M.; Kleissl, J. Comparison of solar power output forecasting performance of the Total Sky Imager and the University of California, San Diego Sky Imager. Energy Procedia 2014, 49, 2340–2350. [Google Scholar] [CrossRef]
- Urquhart, B.; Kurtz, B.; Dahlin, E.; Ghonima, M.; Shields, J.; Kleissl, J. Development of a sky imaging system for short-term solar power forecasting. Atmos. Meas. Tech. Discuss. 2014, 7, 4859–4907. [Google Scholar] [CrossRef]
- Chow, C.W.; Urquhart, B.; Lave, M.; Dominguez, A.; Kleissl, J.; Shields, J.; Washom, B. Intro-hour forecasting with a total sky imager at the UC San Diego solar energy testbed. Sol. Energy 2011, 85, 2881–2893. [Google Scholar] [CrossRef]
- Chu, Y.; Pedro, H.; Coimbra, C. Hybrid intra-hour DNI forecasts with sky image processing enhanced by stochastic learning. Sol. Energy 2013, 98, 592–603. [Google Scholar] [CrossRef]
- Yang, H.; Kurtz, B.; Nguyen, D.; Urquhart, B.; Chow, C.; Ghonima, M.; Kleissl, J. Solar irradiance forecasting using a ground-based sky imager developed at UC San Diego. Sol. Energy 2014, 103, 502–524. [Google Scholar] [CrossRef]
- Bernecker, D.; Riess, C.; Angelopoulou, E.; Hornegger, J. Continuous short-term irradiance forecasts using sky images. Sol. Energy 2014, 110, 303–315. [Google Scholar] [CrossRef]
- West, S.; Rowe, D.; Sayeef, S.; Berry, A. Short-term irradiance forecasting using skycams: Motivation and development. Sol. Energy 2014, 110, 188–207. [Google Scholar] [CrossRef]
- Wood-Bradley, P.; Zapata, J.; Pye, J. Cloud tracking with optical flow for short-term solar forecasting. In Proceedings of the Conference of the Australian Solar Energy Society, Melbourne, Australia, 21 August 2012. [Google Scholar]
- Wang, F.; Zhen, Z.; Mi, Z.; Sun, H.; Su, S.; Yang, G. Solar irradiance feature extraction and support vector machines based weather status pattern recognition model for short-term photovoltaic power forecasting. Energy Build. 2014, 86, 427–438. [Google Scholar] [CrossRef]
- Zhu, T.; Wei, H.; Zhang, C.; Zhang, K.; Liu, T. A Local Threshold Algorithm for Cloud Detection on Ground-based Cloud Images. In Proceedings of the 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Peng, Z.; Yoo, S.; Yu, D.; Huang, D. Solar Irradiance Forecast System Based on Geostationary Satellite. In Proceedings of the IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013. [Google Scholar]
- Yang, D.; Kleissl, J.; Gueymard, C.; Pedro, H.; Coimbra, C. History and trends in solar irradiance and PV power forecasting: A preliminary assessment and review using text mining. Sol. Energy 2018, 168, 60–101. [Google Scholar] [CrossRef]
- Uriate, F.; Smith, C.; VanBroekhoven, S.; Hebner, R. Microgrid Ramp Rates and the Inertial Stability Margin. IEEE Trans. Power Syst. 2015, 10, 3209–3216. [Google Scholar] [CrossRef]
- Bullich-Massagué, E.; Aragüés-Peñalba, M.; Sumper, A.; Boix-Aragones, O. Active power control in a hybrid PV-storage power plant for frequency support. Solar Energy 2017, 144, 49–62. [Google Scholar] [CrossRef]
- Pourmousavia, T.K.S.S.A. Evaluation of the battery operation in ramp-rate control mode within a PV plant: A case study. Sol. Energy 2018, 166, 242–254. [Google Scholar] [CrossRef]
- Parra, I.; Marcos, J.; García, M.; Marroyo, L. Dealing with the implementation of ramp-rate control strategies—Challenges and solutions to enable PV plants with energy storage systems to operate correctly. Solar Energy 2018, 169, 242–248. [Google Scholar]
- Available online: https://www.nrel.gov/esif/assets/pdfs/omnetric-industry-day.pdf (accessed on 16 February 2019).
- Available online: https://apps.dtic.mil/dtic/tr/fulltext/u2/688845.pdf (accessed on 16 February 2019).
- Bendele, B. UTSA Solar Project Investigation—A Study to Measure the Current State of the SECO Project to Guide Preparation for the Next Stage of Research and Development. Texas Sustainable Energy Research Institute Internal Report. 2016. [Google Scholar]
- Peng, Z.; Yu, D.; Huang, D.; Heiser, J.; Yoo, S.; Kalb, P. 3D cloud detection and tracking system for solar forecast using multiple sky imagers. Solar Energy 2015, 118, 496–519. [Google Scholar] [CrossRef]
- Lucas, B.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence (IJCAI), Vancouver, BC, Canada, 24–28 August 1981. [Google Scholar]
- Kuhn, P.; Wirtz, M.; Killius, N.; Wilbert, S.; Bosch, J.L.; Hanrieder, N.; Nouri, B.; Kleissl, J.; Ramírez, L.; Schroedter-Homscheidt, M.; et al. Benchmarking three low-cost, low-maintenance cloud height measurement systems and ECMWF cloud heights against a ceilometer. Solar Energy 2018, 168, 140–152. [Google Scholar] [CrossRef]
- King, D.L.; Boyson, W.E.; Hansen, B.R.; Bower, W.I. Improved Accuracy for Low-cost Irradiance Sensors; Photovoltaic Systems Department: Albuquerque, NM, USA, 1998.
- Farnebäck, G. Two-frame motion estimation based on polynomial expansion. Image Anal. 2003, 2749, 363–370. [Google Scholar]
- Wolff, B.; Kühnert, J.; Lorenz, E.; Kramer, O.; Heinemann, D. Comparing support vector regression for PV power forecasting to a physical modeling approach using measurement, numerical weather prediction, and cloud motion data. Sol. Energy 2016, 135, 197–208. [Google Scholar] [CrossRef]
- Voyant, C.; Notton, G.; Kalogirou, S.; Nivet, M.L.; Paoli, C.; Motte, F.; Fouilloy, A. Machine learning methods for solar radiation forecasting: A review. Renew. Energy 2017, 105, 569–582. [Google Scholar] [CrossRef]
- Dong, B.; Li, Z.; Rahman, S.; Vega, R. A hybrid model approach for forecasting future residential electricity consumption. Energy Build. 2016, 117, 341–351. [Google Scholar] [CrossRef]
- Li, Z.; Rahman, S.; Vega, R.; Dong, B. A hierarchical approach using machine learning methods in solar photovoltaic energy production forecasting. Energies 2016, 9, 55. [Google Scholar] [CrossRef]
- Salakhutdinov, R.; Hinton, G. Deep Boltzmann Machines. In Proceedings of the Twelfth International Conference on Artificial Intelligence and Statistics (AISTATS’09), Clearwater Beach, FL, USA, 16 April 2009. [Google Scholar]
- Bengio, Y.; LeCun, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar]
- Schmidhuber, J. Deep Learning in Neural Networks: An Overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Mallat, S. Understanding deep convolutional networks. Phil. Trans. R. Soc. A 2016, 374, 20150203. [Google Scholar] [CrossRef]
- Raschka, S. Python Machine Learning, Birmingham; PACKT Publishing: London, UK, 2016. [Google Scholar]
- Hofmann, M.; Klinkenberg, R. (Eds.) RapidMiner—Data Mining Use Cases and Business Analytics Applications; Chapman and Hall/CRC: New York, NY, USA, 2013. [Google Scholar]
- Available online: http://www.h2o.ai/wp-content/themes/h2o2016/images/resources/DeepLearningBooklet.pdf (accessed on 16 February 2019).
- Available online: http://h2o-release.s3.amazonaws.com/h2o/rel-turchin/3/docs-website/h2o-docs/booklets/GBM_Vignette.pdf (accessed on 16 February 2019).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach.Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Reno, M.; Hansen, C.; Stein, J. Global Horizontal Irradiance Clear Sky Models: Implementation and Analysis; SANDIA: Albuquerque, NM, USA, 2012.
- Hinton, G.; Salakhutdinov, R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Nguyen, D.; Kleissl, J. Stereographic methods for cloud base height determination using two sky imagers. Solar Energy 2014, 107, 495–509. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Li, Q.; Lu, W.; Yang, J.; Wang, J. Thin Cloud Detection of All-Sky Images Using Markov Random Fields. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1545–1558. [Google Scholar] [CrossRef]
- Mertens, T.; Kautz, J.; van Reeth, F. Exposure fusion. In Proceedings of the 15th Pacific Conference on Computer Graphics and Applications (PG’07), Maui, HI, USA, 29 October–2 November 2007; pp. 382–390. [Google Scholar]
- Traonmilin, Y.; Aguerrebere, C. Simultaneous High Dynamic Range and Superresolution Imaging without Regularization. SIAM J. Imaging Sci. 2014, 7, 1624–1644. [Google Scholar] [CrossRef]
- Available online: https://opencv.org/ (accessed on 16 February 2019).
- Available online: https://docs.opencv.org/3.0-beta/opencv2refman.pdf (accessed on 16 February 2019).
- Nagothu, K.; Kelley, B.; Jamshidi, M.; Rajaee, A. Persistent Net-AMI for Microgrid Infrastructure Using Cognitive Radio on Cloud Data Centers. IEEE Syst. J. 2012, 6, 4–15. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Definition |
|---|---|
| Mean Squared Error | |
| Normalized RMS Error | |
| Explained Variance | |
| Mean Absolute Error | |
| Mean Absolute Percent Error |
| ML Model | Platform | Runtime (min) | MAE | MAPE | nRMSE | RR2 |
|---|---|---|---|---|---|---|
| Multilayer Perceptron | Scikit-Learn | 3:05 | 81.21 | 33.05% | 32% | 0.71 |
| Random Forest | Scikit-Learn | 14:53 | 66.86 | 28% | 29% | 0.76 |
| Deep Learning | Rapidminer | 43:52 | 50.992 | 27.13% | 21.6% | 0.871 |
| Gradient Boosted Trees | Rapidminer | 4:50 | 47.072 | 22.73% | 21.1% | 0.875 |
| Hid. Layer | Nodes per H. Layer | # Epochs | Run Time | MAE | MAPE | nRMSE | R2 |
|---|---|---|---|---|---|---|---|
| 2 | 50,50 | 10 | 1:55 min | 65.807 | 32.73% | 25.8% | 0.815 |
| 2 | 195,195 | 10 | 7:10 min | 66.872 | 40.76% | 25.6% | 0.824 |
| 3 | 195,195,195 | 500 | 43:52 min | 50.992 | 27.13% | 21.6% | 0.871 |
| 5 | 195,195,97,195,195 | 100 | 67:42 min | 48.519 | 26.09% | 21.6% | 0.871 |
| 5 Moderately Cloudy Days | 5 Clear Sky Days | |||||||
|---|---|---|---|---|---|---|---|---|
| Model Name | GLM | MLP | RFR | GBT | GLM | MLP | RFR | GBT |
| MAPE | 39.75 | 13.53 | 15.79 | 20.93 | 12.0 | 2.44 | 2.66 | 3.79 |
| Explained Variance R2 | 0.70 | 0.95 | 0.93 | 0.90 | 0.97 | 1.00 | 1.00 | 0.99 |
| Mean Absolute Error | 86.43 | 30.66 | 33.30 | 44.68 | 20.43 | 5.30 | 5.84 | 8.57 |
| Elapsed Time (Sec) | 0.1 | 513.1 | 69.9 | 12.4 | 0.1 | 512.8 | 60.5 | 12.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Richardson, W.; Cañadillas, D.; Moncada, A.; Guerrero-Lemus, R.; Shephard, L.; Vega-Avila, R.; Krishnaswami, H. Validation of All-Sky Imager Technology and Solar Irradiance Forecasting at Three Locations: NREL, San Antonio, Texas, and the Canary Islands, Spain. Appl. Sci. 2019, 9, 684. https://doi.org/10.3390/app9040684
Richardson W, Cañadillas D, Moncada A, Guerrero-Lemus R, Shephard L, Vega-Avila R, Krishnaswami H. Validation of All-Sky Imager Technology and Solar Irradiance Forecasting at Three Locations: NREL, San Antonio, Texas, and the Canary Islands, Spain. Applied Sciences. 2019; 9(4):684. https://doi.org/10.3390/app9040684
Chicago/Turabian StyleRichardson, Walter, David Cañadillas, Ariana Moncada, Ricardo Guerrero-Lemus, Les Shephard, Rolando Vega-Avila, and Hariharan Krishnaswami. 2019. "Validation of All-Sky Imager Technology and Solar Irradiance Forecasting at Three Locations: NREL, San Antonio, Texas, and the Canary Islands, Spain" Applied Sciences 9, no. 4: 684. https://doi.org/10.3390/app9040684
APA StyleRichardson, W., Cañadillas, D., Moncada, A., Guerrero-Lemus, R., Shephard, L., Vega-Avila, R., & Krishnaswami, H. (2019). Validation of All-Sky Imager Technology and Solar Irradiance Forecasting at Three Locations: NREL, San Antonio, Texas, and the Canary Islands, Spain. Applied Sciences, 9(4), 684. https://doi.org/10.3390/app9040684