1. Introduction
Active noise control (ANC) systems have been intensively studied in recent years [
1,
2]. These systems commonly use adaptive filters to cancel a primary noise by means of a cancelling noise. One of the most popular adaptive algorithms is the affine projection (AP) algorithm [
3] that has been widely used for computing ANC systems since AP algorithms present faster convergence speed compared with least mean square (LMS) algorithms. However, AP algorithms demand high computational power to process a large number of input vectors
L (called projection order) to update the weight vector. Nevertheless, the use of a high projection order increases the convergence speed. A challenging task is to find an optimal projection order whilst maintaining fast convergence speed.
Some authors have proposed techniques to minimize the computational complexity of the AP algorithms applied to ANC systems [
4,
5]. However, many of them have some restrictions rendering their use unfeasible in practical applications. Recently, Avalos et al. [
6] introduced a new variant of the AP algorithms based on an affine projection-like-I (APL-I) algorithm. The authors proposed a strategy to update the filter coefficients only when the estimation error is higher than a pre-determined threshold and it uses a method to adjust the projection order dynamically. Their results demonstrate that the filtered-x error-coded affine projection-like FXECAP-L algorithm with evolving order reduces the computational burden and maintains the high-speed convergence. This potentially allows the use of this algorithm in ANC systems, requiring lower computational power compared with AP algorithms whilst maintaining high convergence speed. However, the scaling factor and the encoder resolution of the algorithm need to be adjusted manually, which represents a great effort for the designers, in order for it to be used in practical applications.
In particular, several authors have employed the FXLMS algorithm in ANC systems for acoustic ducts due to its low computational cost [
7,
8,
9]. However, in these ANC systems, fast convergence and stability are vital. Therefore, the use of the APL-I algorithm could improve these factors. In addition, the development of APL-I algorithms with automatic adjustment is still a big challenge [
10,
11]. In this paper, we present, for the first time, a strategy to automatically adjust the scaling factor and the encoder resolution of the FXECAP-L algorithm with evolving order. The proposed strategy to automatically adjust the scaling factor is based on the estimation of the mean squared value of the error vector. Meanwhile, the automatic adjustment of the encoder resolution was solved using the instantaneous value of the steady-state mean square error. We intend to provide an adaptive algorithm that can be used in practical ANC applications, such as automotive, appliance, industrial and transportation applications. Here, we prove its practicality by developing an ANC system for controlling the noise in an acoustic duct. Our results demonstrate that the automatic scaling factor and encoder resolution have helped us to rapidly develop a particular ANC application.
2. Multichannel Filtered-X Error-Coded Affine Projection-Like Algorithm with Evolving Order
The FXECAP-L algorithm with evolving order was introduced by Avalos et al. [
6]. This algorithm aims at reducing the computational cost by employing two techniques. The first technique is linked to the update of the filter coefficients based on the estimation error, i.e., there is an update process when the error is higher than a pre-determined threshold. The second technique is based on the calculation of projection order in each iteration [
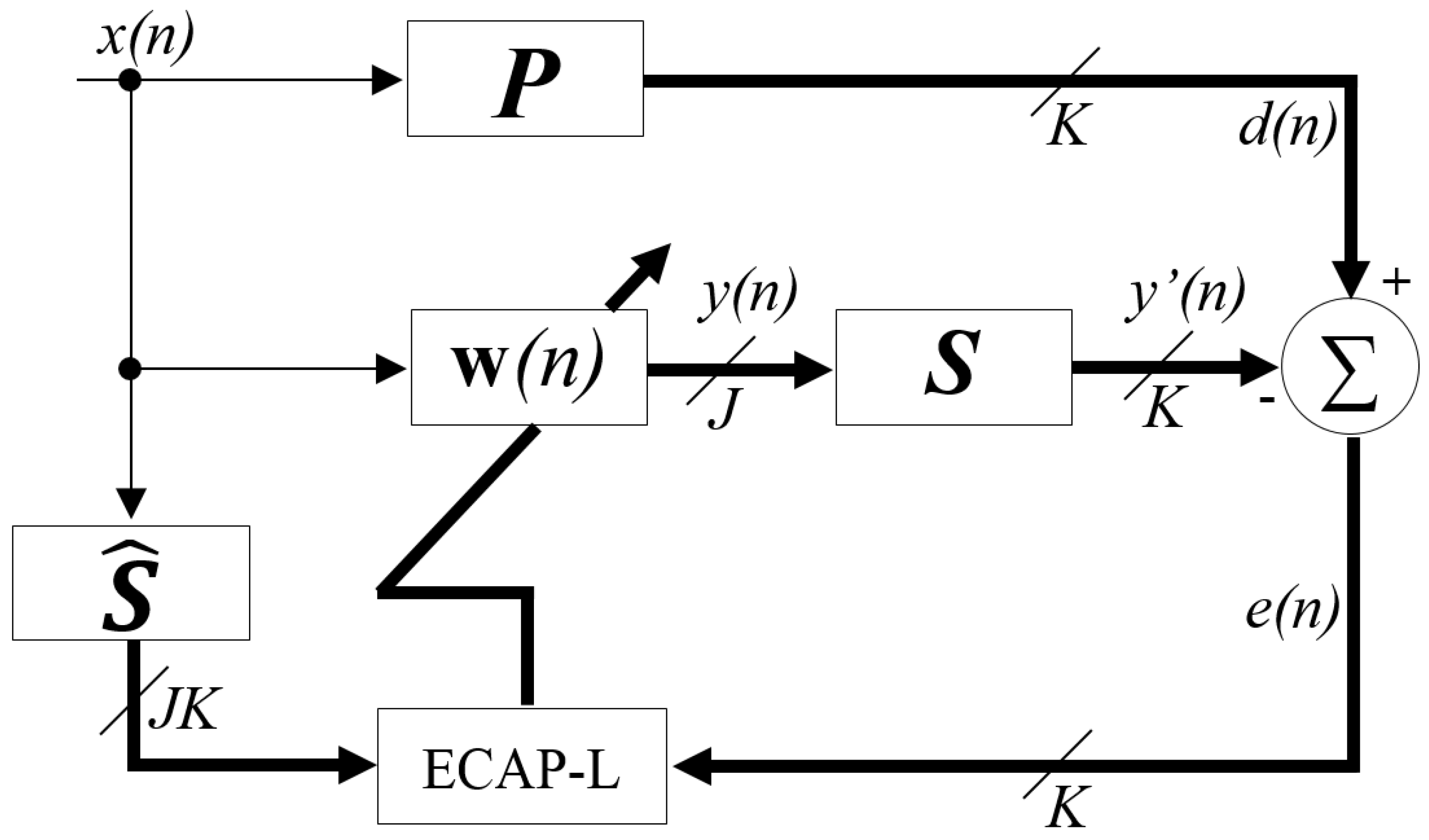
6]. The block diagram of a multichannel ANC system using the FXECAP-L algorithm is shown in
Figure 1. The blocks
P and
S represent the primary and secondary paths, respectively,
K is the number of error sensors,
J the number of actuators,
the
ith reference signal obtained from
I reference sensors and
is the adaptive filter output given by
The reference signal is defined as
and the adaptive filter coefficients as
, where
N is the length of the adaptive filter. In practice, the desired signal
is unavailable, and thus the error signal vector
is estimated using an approximation. Therefore, the estimation is obtained using past samples of the error signals and is expressed as
, where
L is the projection order. To compensate the effects caused by the secondary paths
, the reference signal
is filtered using the following expression:
where
is a fixed FIR filter of length
M that models
and
.
To calculate the coefficient update equation, the filtered-x signals are arranged in a matrix
, composed of the filtered-x signals
. Thus, the filter update equation for the FXECAP-L algorithm is expressed as follows:
where the error is encoded using
, and the resolution is obtained as follows:
Here,
denotes the maximum probable error and
b is the number of bits used to encode the error. The step size
can be calculated using the following expression:
where
is a scaling factor used to compensate for the mismatch between
and
. Commonly, the value of
can be defined in the interval
and the designer can choose it by trial and error. The ECAP-L algorithm reduces the computational burden by updating the filter coefficients when the error signal is larger than a pre-established threshold. Such a threshold is determined by the error magnitude; in this way, when the error signal is small, the coefficients are not updated. The update threshold is defined as follows:
As mentioned in [
6], when the error is encoded with a lower number of bits, the convergence speed is slower. However, using a large number of bits increases the convergence speed, but the update threshold is not reached, and thus the algorithm updates its coefficients in almost all the iterations.
The FXECAP-L algorithm dynamically calculates the projection order using a strategy based on the instantaneous residual error power at each error sensor. The rule of variation of the projection order is defined as
where
is the projection order used in each iteration;
is the maximum projection order;
and
are thresholds derived from the steady-state mean square error of the algorithm, and can be expressed as
and
where
is the variance of a noise signal.
4. Simulation Results
We evaluate the performance of the proposed algorithm by considering a 1:2:2 multichannel ANC system. The tap length of the primary path, the secondary path, and the adaptive filter was of 256, 128 and 100 coefficients, respectively. These values were defined previously by considering a typical case (
,
,
,
and
). Therefore, the computational cost of the proposed algorithm is defined in
Table 1 and
Table 2. The impulse response of the acoustics paths was obtained from [
14]. In order to evaluate the behavior of the proposal, we performed 50 independent trials each with 50,000 iterations. Furthermore, to test the tracking capabilities, we caused an abrupt change to the impulse response of the acoustic primary path at the middle of the iterations. As the reference signal, we used white Gaussian noise with unit variance and we also added white Gaussian noise to the error microphones with SNR 30 dB.
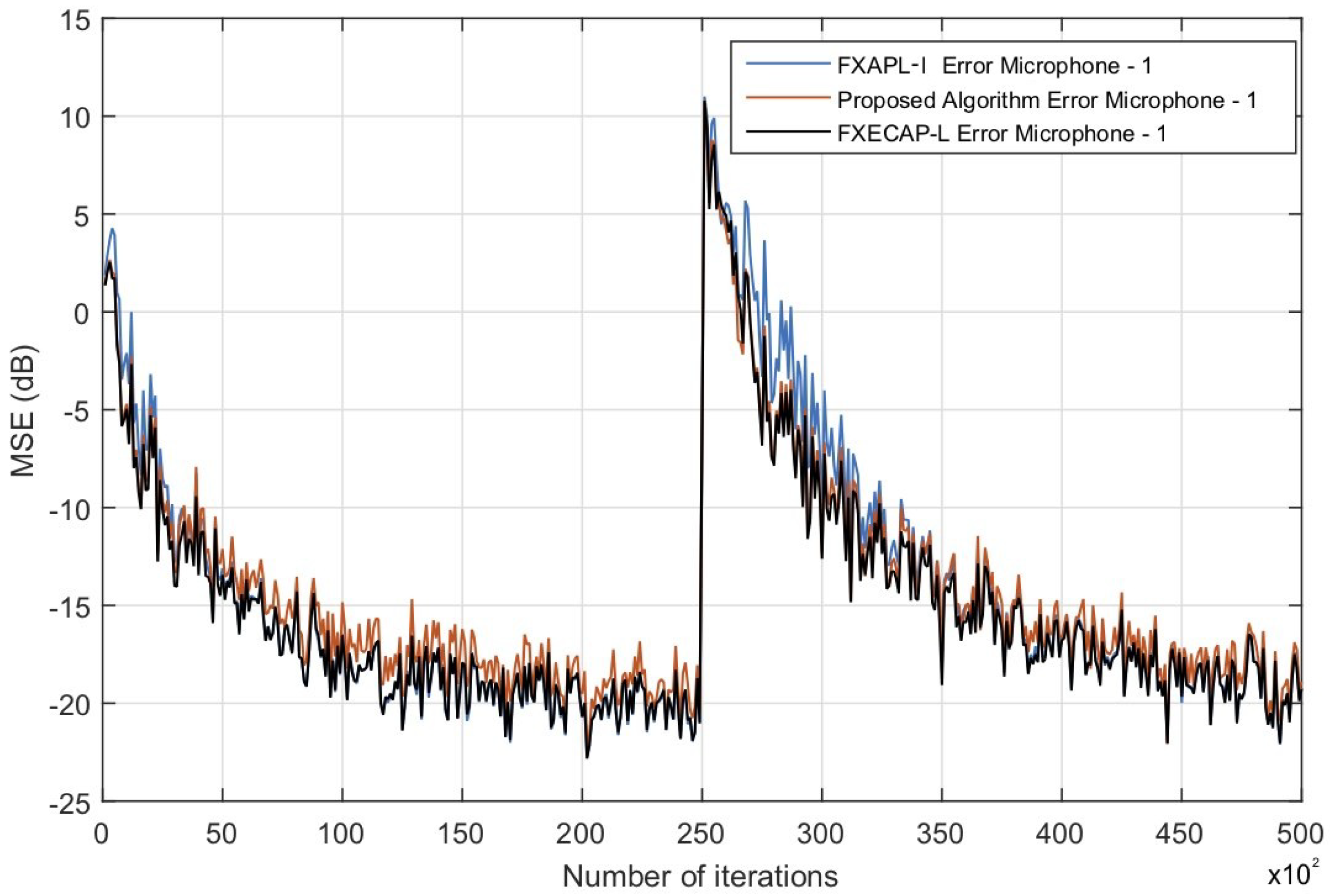
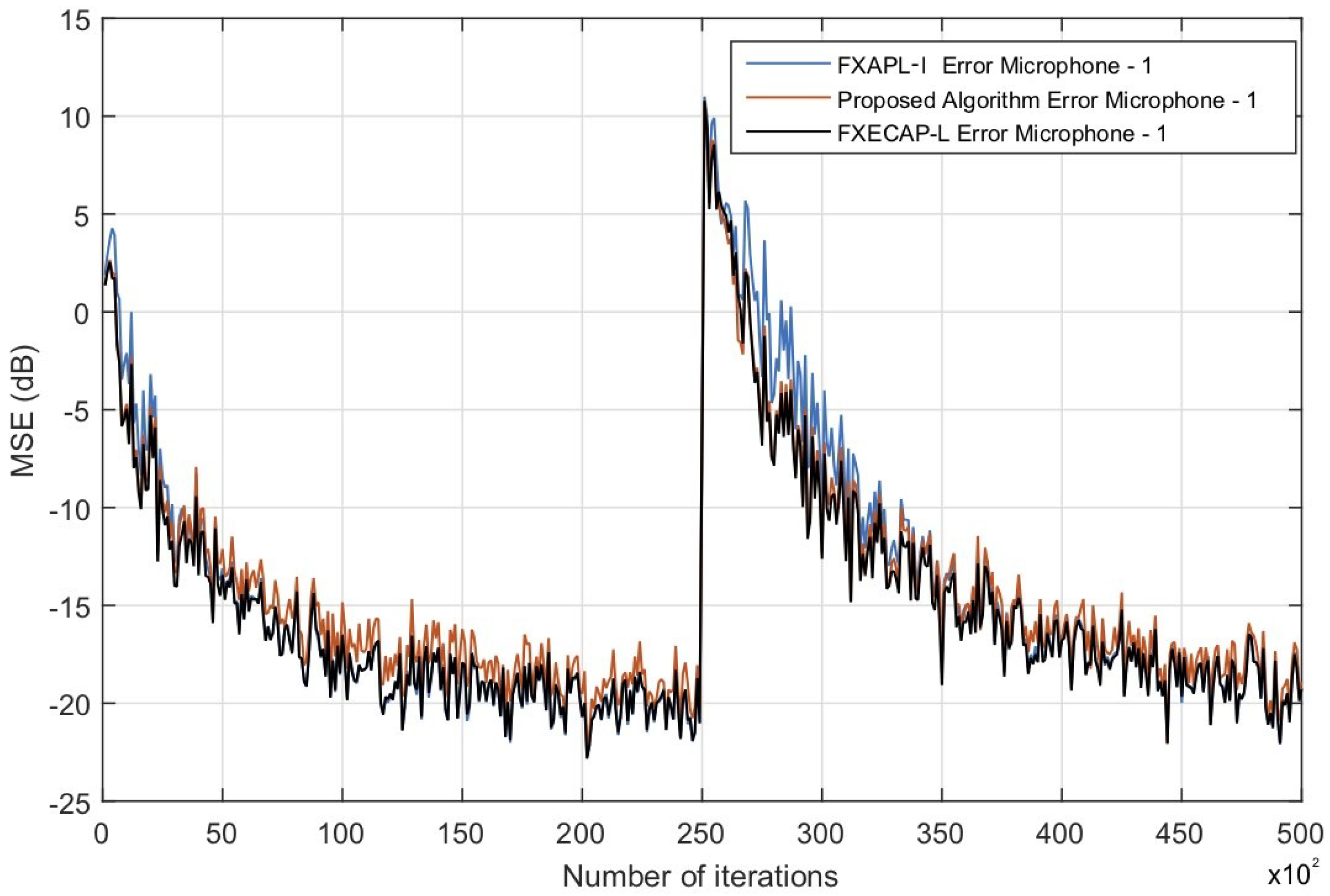
Figure 2 shows a comparison of the mean square error (MSE) at the error microphone 1, for the filtered-x affine projection-like-I (FXAPL-I) algorithm, the conventional FXECAP-L algorithm and the proposed algorithm. For this experiment, the projection order was
L = 5 for all the algorithms and the error was encoded with
b = 6 bits in the FXECAP-L algorithm and the proposed algorithm. The scaling factor for the FXAPL-I algorithm and the FXECAP-L algorithm was
= 0.008, and
= 0.015, respectively. As can be observed from
Figure 2, the convergence speed for all the algorithms is almost identical.
Figure 3 shows the number of bits that are used to encode the error of the proposed algorithm. As can be seen, the number of bits decreases as the process advances. This allows the algorithm to stay within the update threshold, avoiding the computation of the algorithm in each iteration. In this way, the average number of updates performed by the proposed algorithm was 19,966 (39.93%), while the FXECAP-L algorithm updated its coefficients 49,610 times (99.2%).
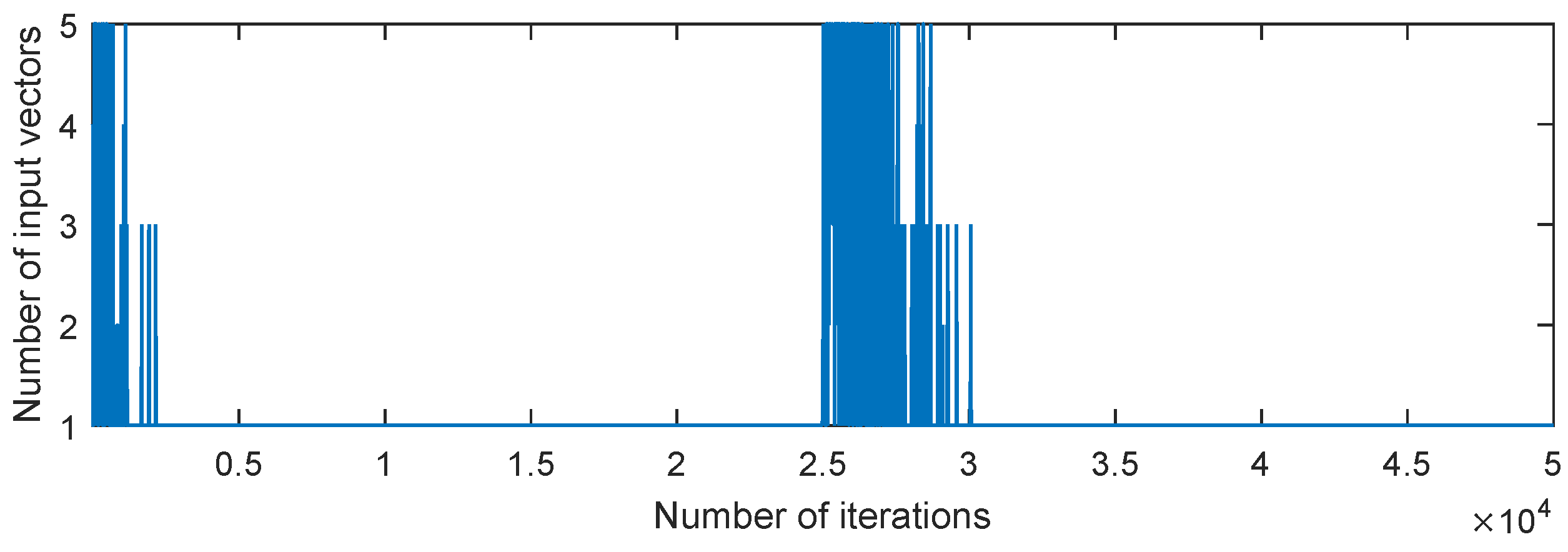
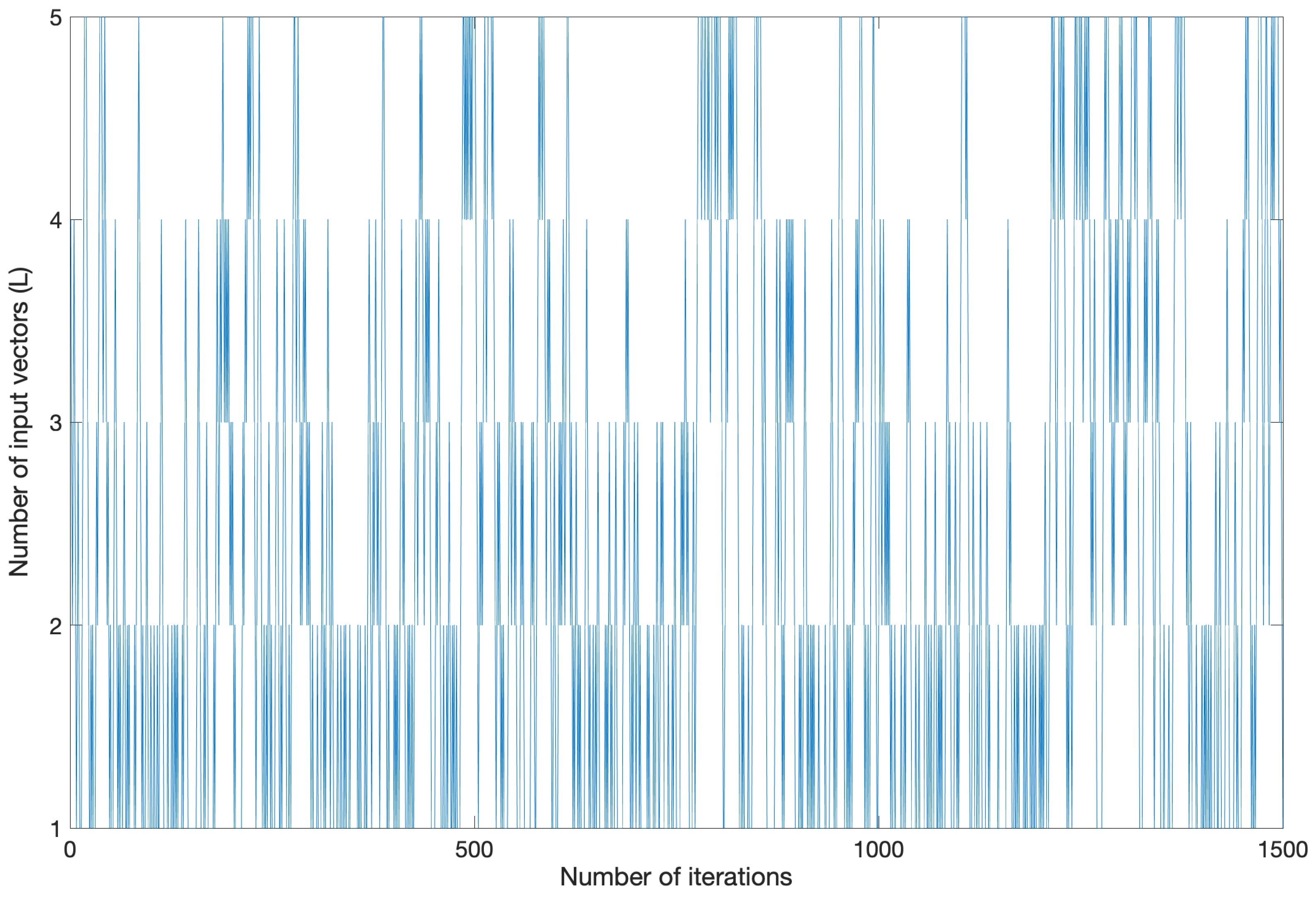
Figure 4 shows the number of input vectors for the proposed algorithm. As can be seen, the proposed strategy does not affect the evolving behavior; therefore, the computational burden is reduced.
5. Experimental Verification
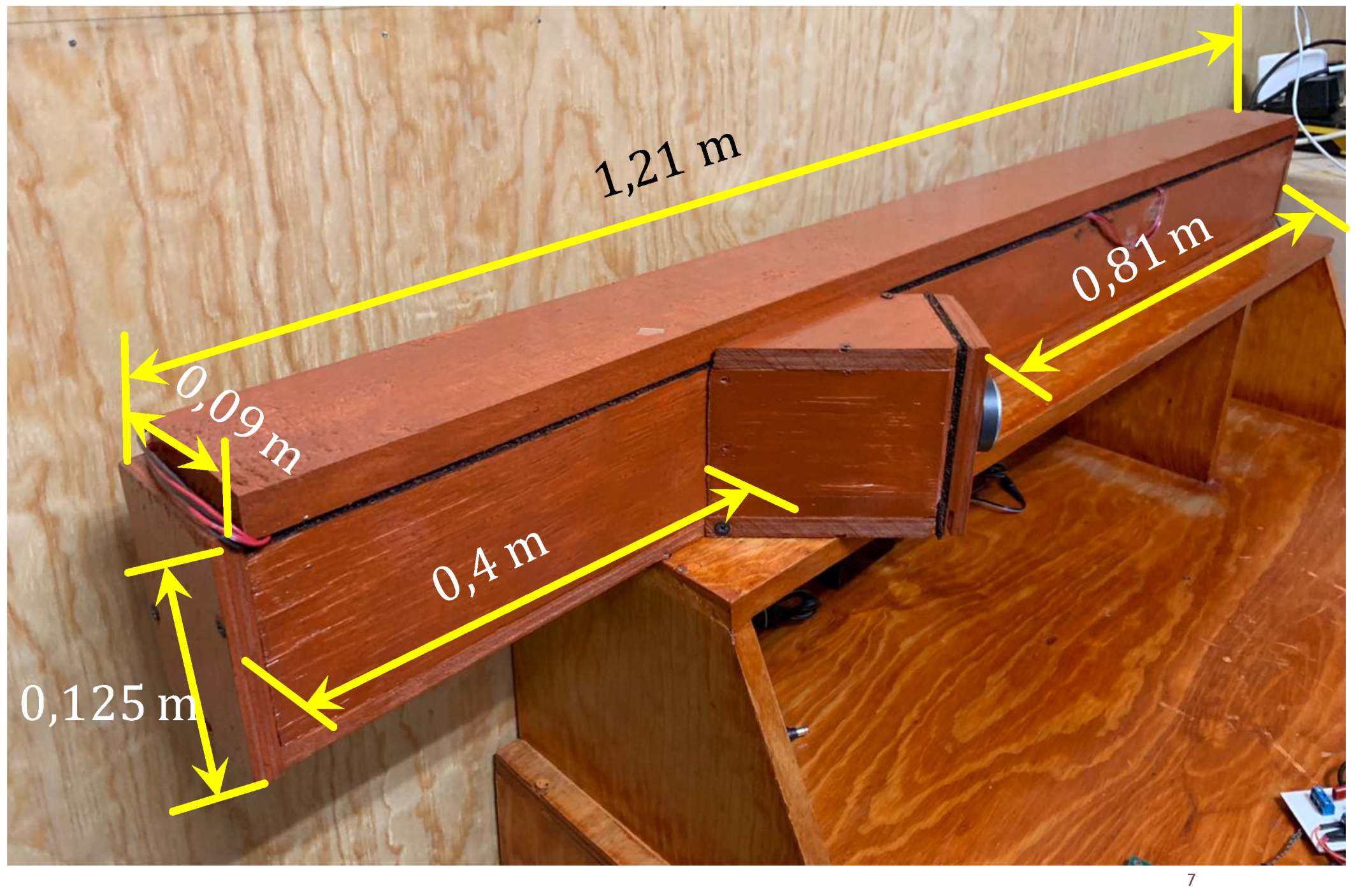
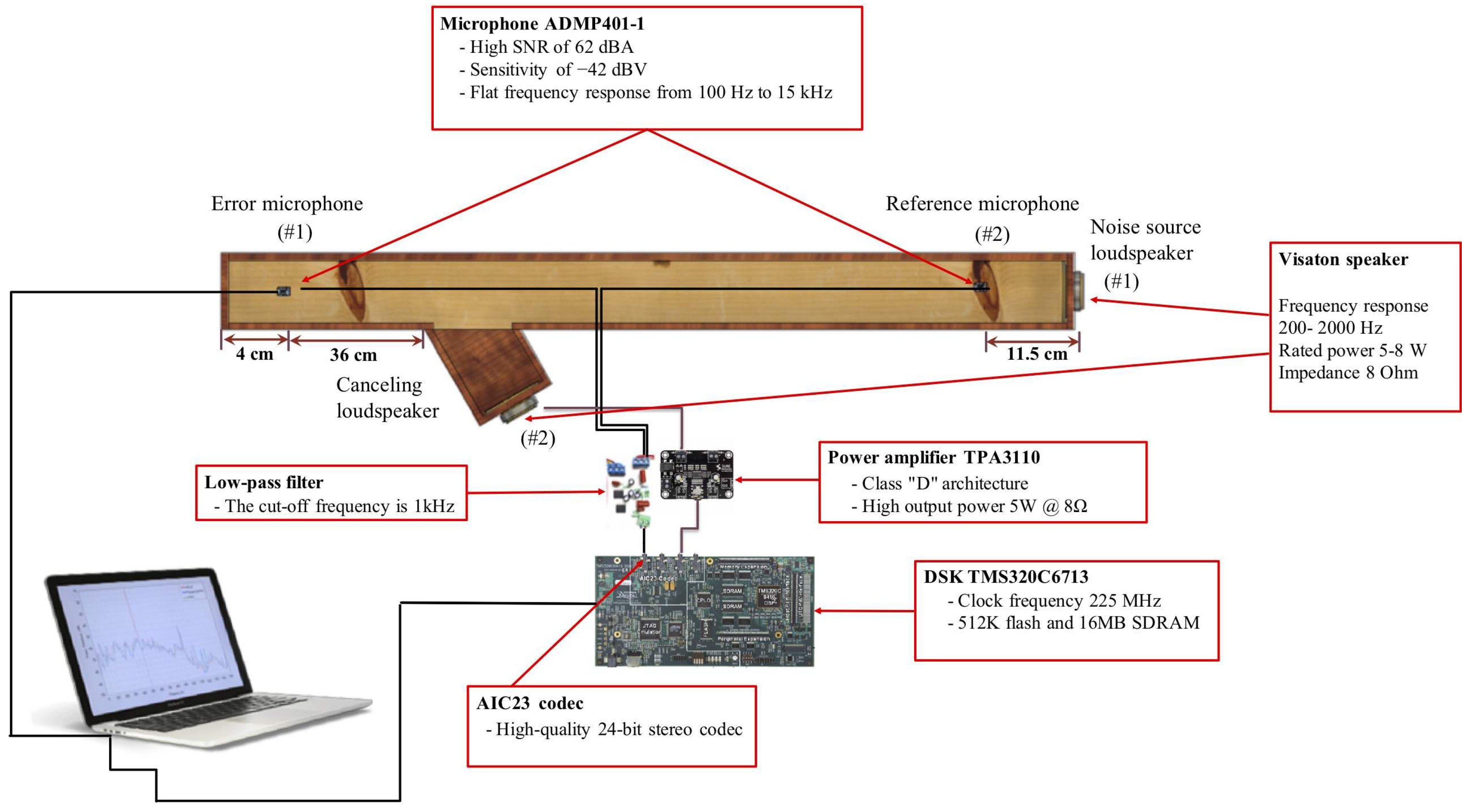
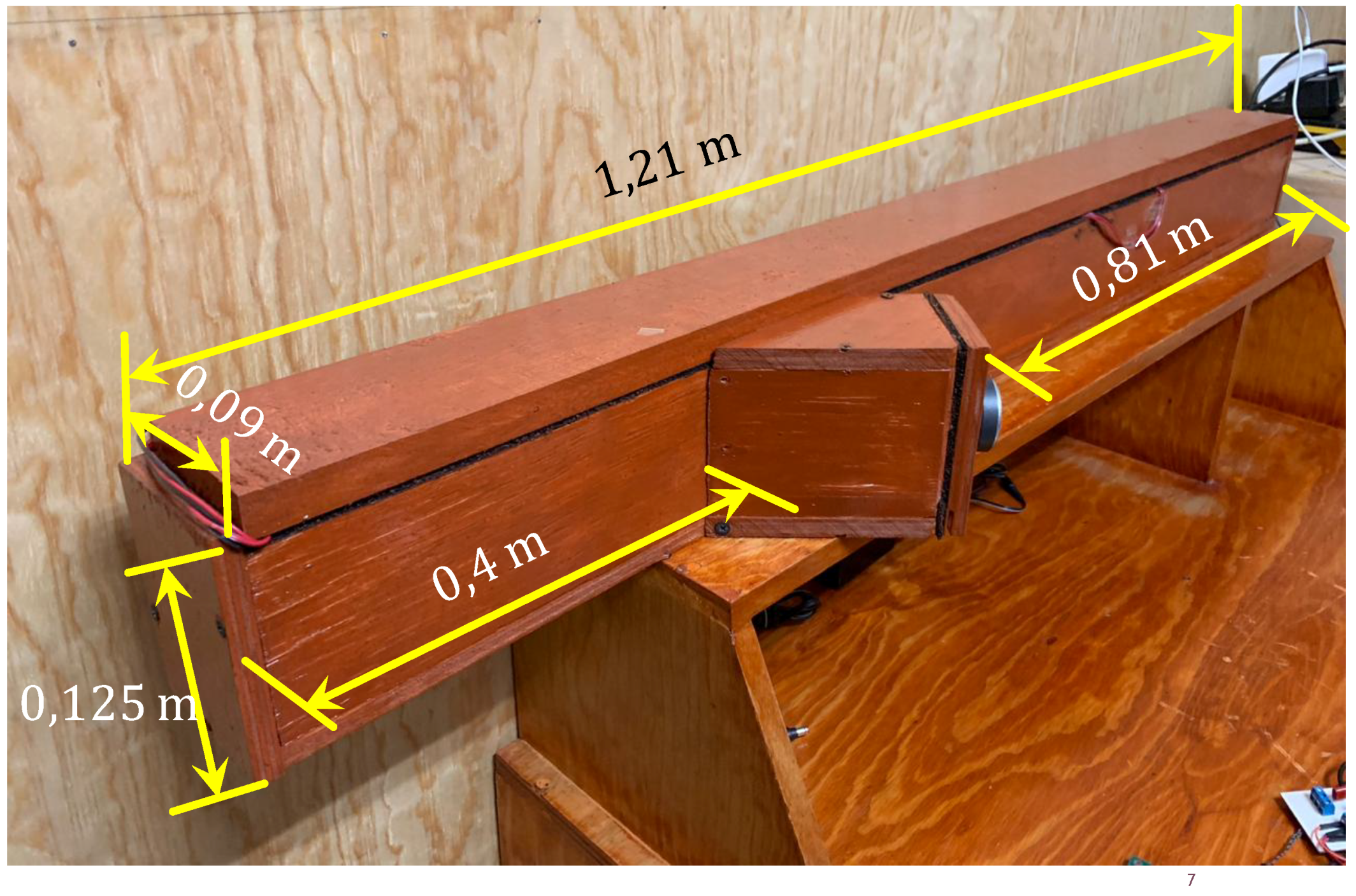
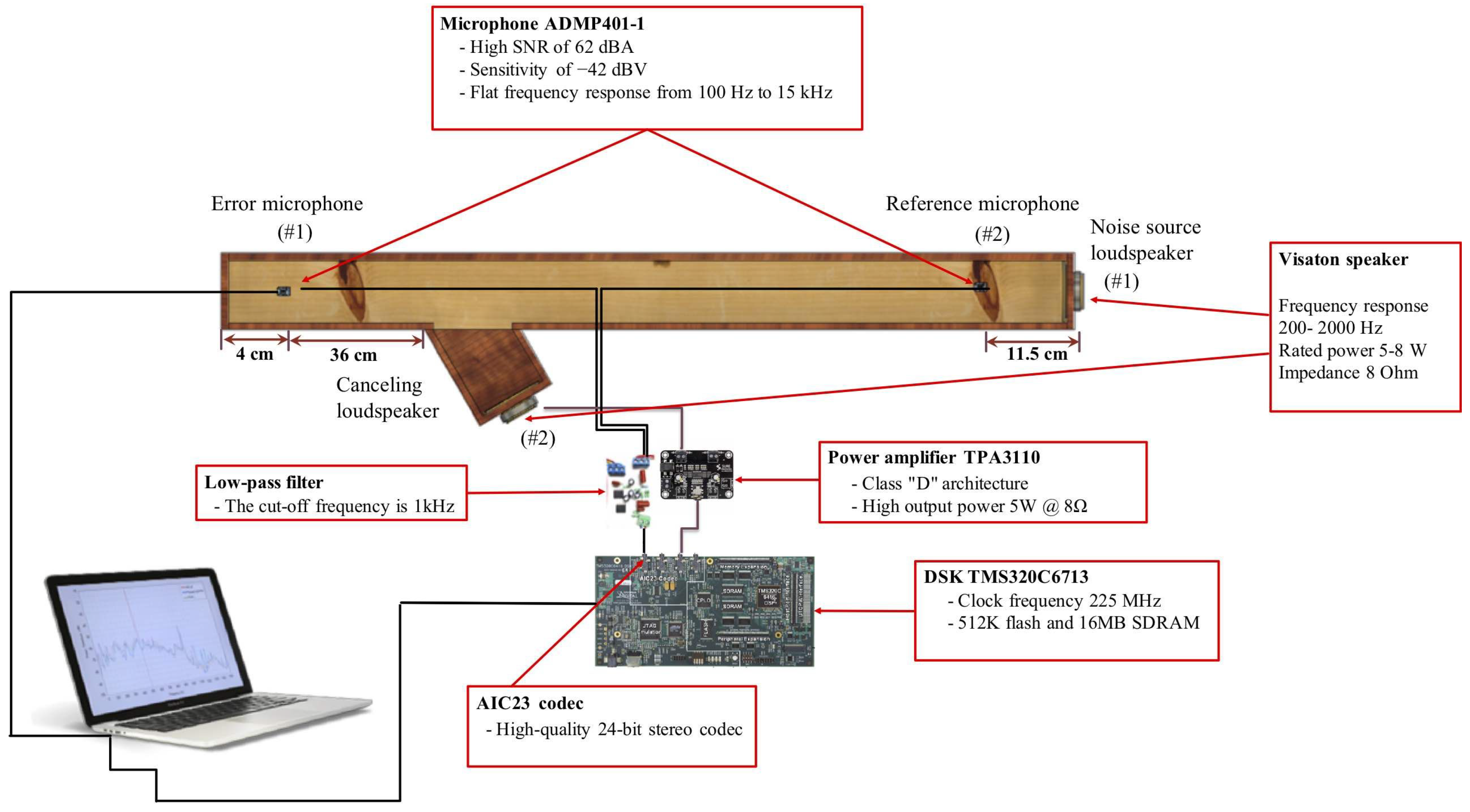
Once the control algorithm used in the multichannel ANC system was verified by simulations, we performed 1:1:1 ANC experiments in a wooden duct to validate it. The aim of this experiment was to show how the inclusion of the automatic scaling factor reduces the time required to develop real-time practical ANC applications since the manual setting of this factor is very time consuming. In addition, the proposed automatic adjustment of the scaling factor allows an easy adaptation of the control algorithm when abrupt changes in the reference signal occur. As a consequence, real-time analysis can be performed. The length and width of the duct are 1.21 m and 0.09 m, respectively, as shown in
Figure 5.
In addition, the experimental set-up involves analogue low-pass filters, microphones, speakers, an audio power amplifier and a DSK board TMSC3206713, as shown in
Figure 6. In general, we use analog low-pass filters to eliminate signals with high frequencies obtained from the microphones (#1 and #2). Here, the error microphone (#1) and reference microphone (#2) were employed to measure the residual error signal and reference signal, respectively. On the other hand, the noise source loudspeaker (#1) and the cancelling loudspeaker (#2) were used to generate a primary disturbance signal and anti-noise signal, respectively. Here, we used an audio power amplifier along with a loudspeaker (#2) to generate the anti-noise signal. The control algorithm was implemented in the DSK TM320C6713 from Texas Instruments (TI). In general terms, the error signal was measured by means of a microphone (#1), and then filtered by a low-pass filter. The resulting analog signal was converted to a digital signal to be processed by the DSK TM320C6713 board. Once the control algorithm generated the anti-noise signal, the DSK TM320C6713 board sent the analog signal to the power amplifier to ensure the acoustic cancellation via loudspeaker (#2).
In this experiment, the transfer function of the secondary path was estimated offline using an LMS algorithm with 128 coefficients. Using this strategy, we can easily obtain the acoustic characteristics between the microphone (#1) and loudspeaker (#2). On the other hand, we considered two types of reference signal, a single-tonal input of 500 Hz and a multi-tonal input of 600, 750 and 900 Hz, in order to evaluate the ANC system in the acoustic duct. In addition, the variance of the noise and SNR were obtained by means of acoustic sensors.
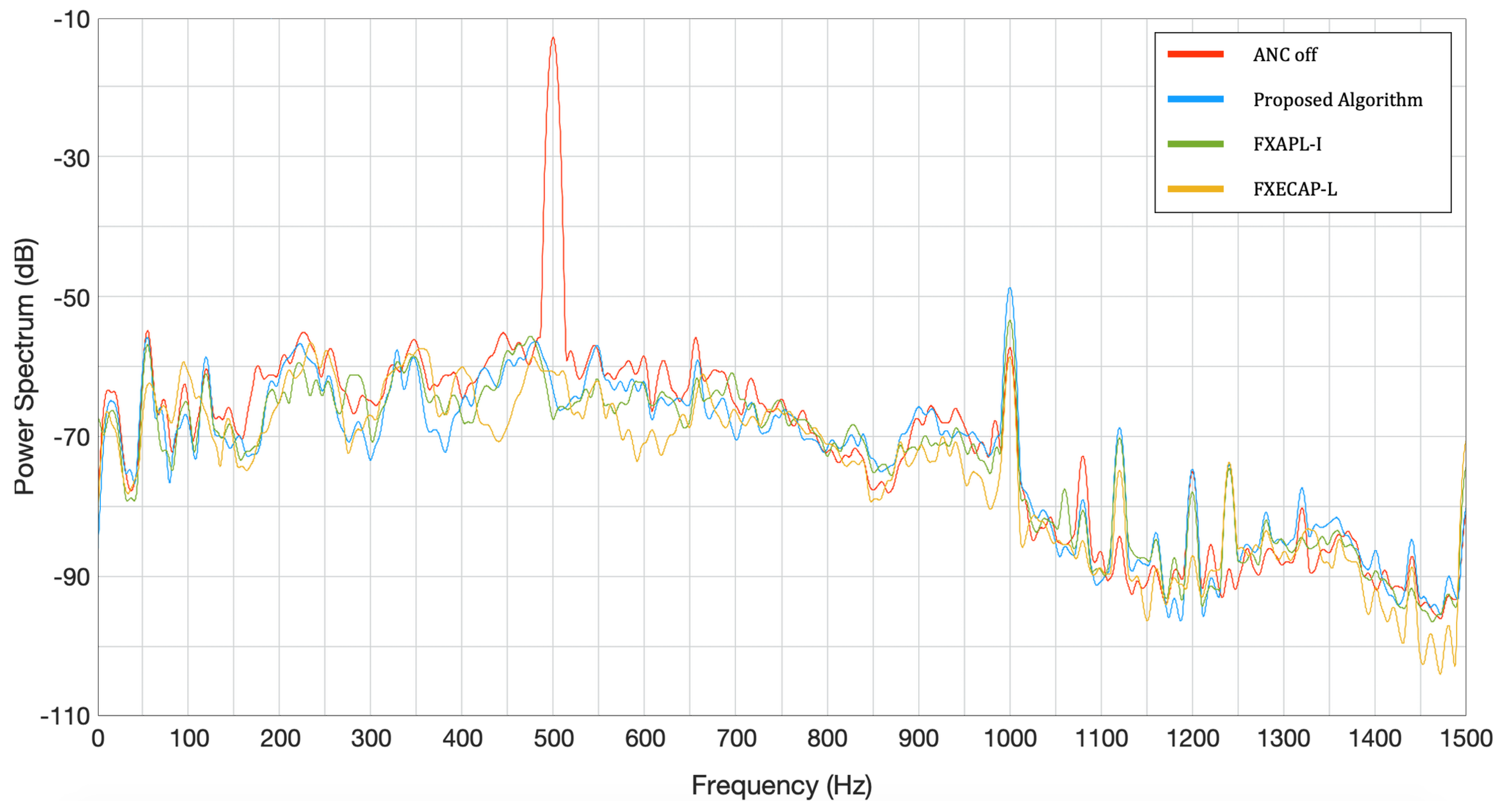
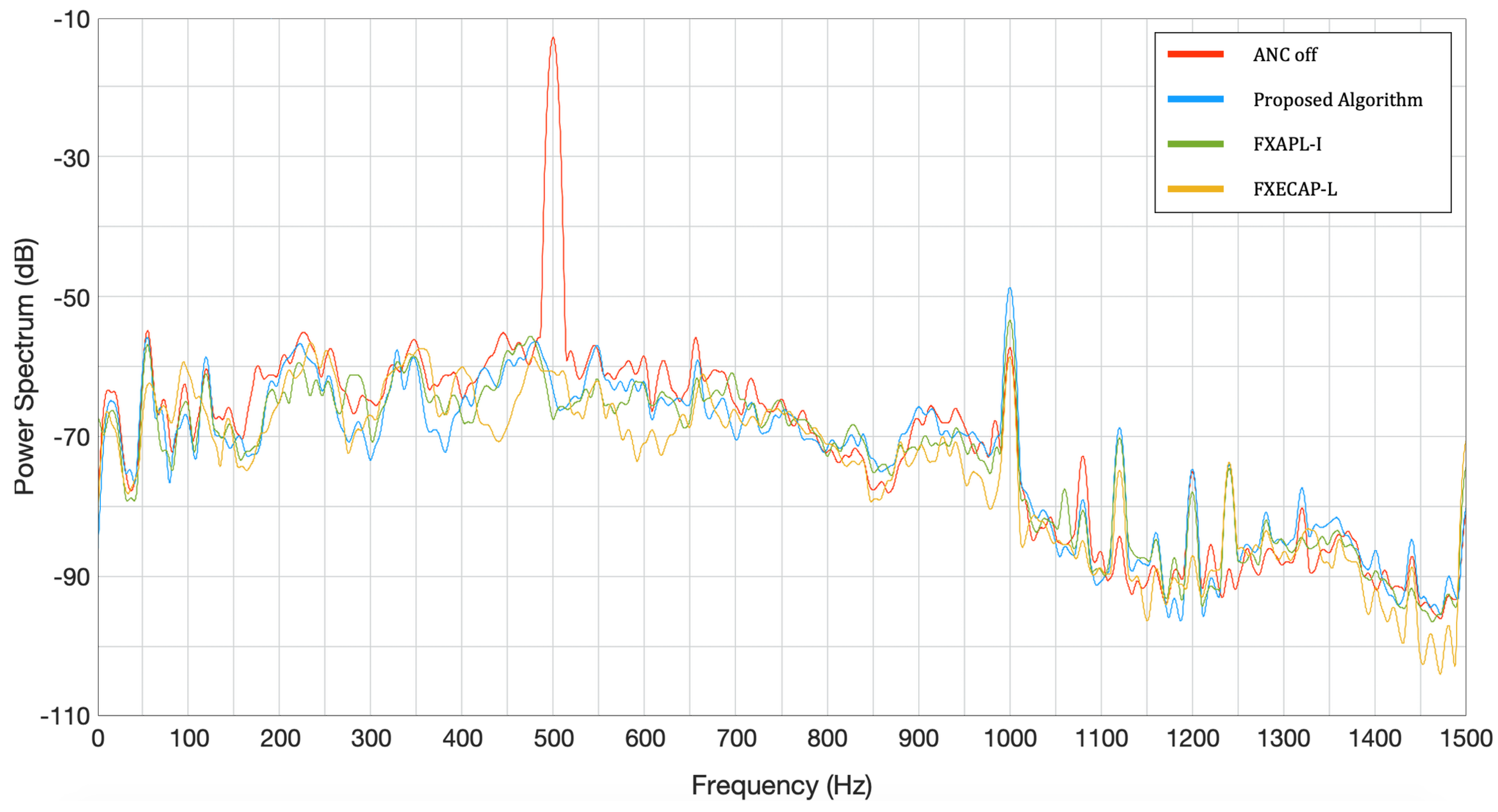
Case 1: Single-tone as a reference signal
Figure 7 shows a comparison between the FXECAP-L algorithm, the FXAPL-I algorithm and the proposed algorithm in terms of the power spectrum of the error signal at the microphone (#1). In all algorithms, the projection order was
L = 5 and the error was encoded with
b = 10 bits. As can be observed from
Figure 7, all algorithms can effectively attenuate noise. However, the automatic adjustment of the scaling factor has allowed the ANC system to be rapidly developed. In addition, the average number of updates performed by the proposed algorithm and the conventional FXECAP-L algorithm were 52,164 (48.07%) and 78,131 (72%), respectively. For simplicity,
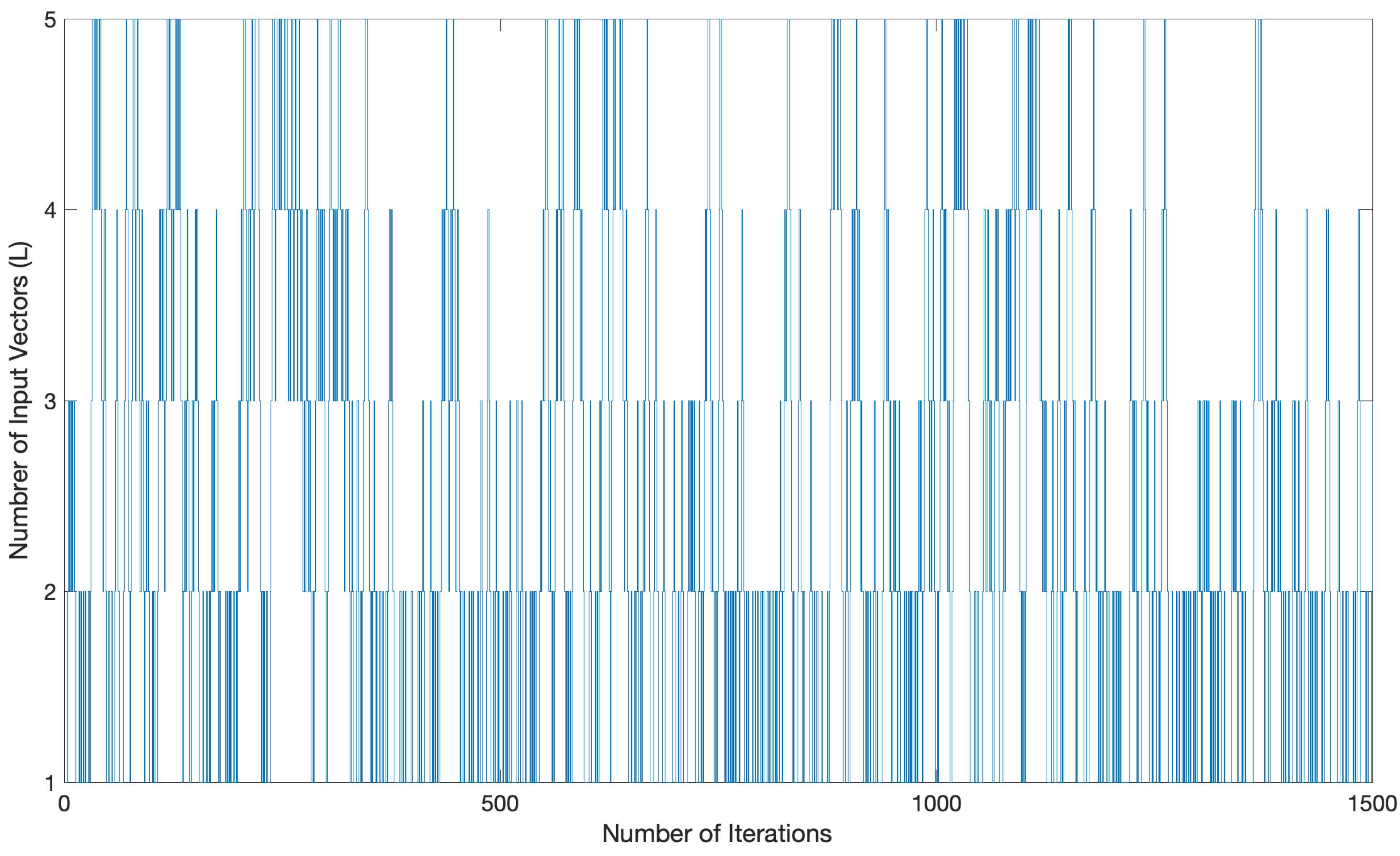
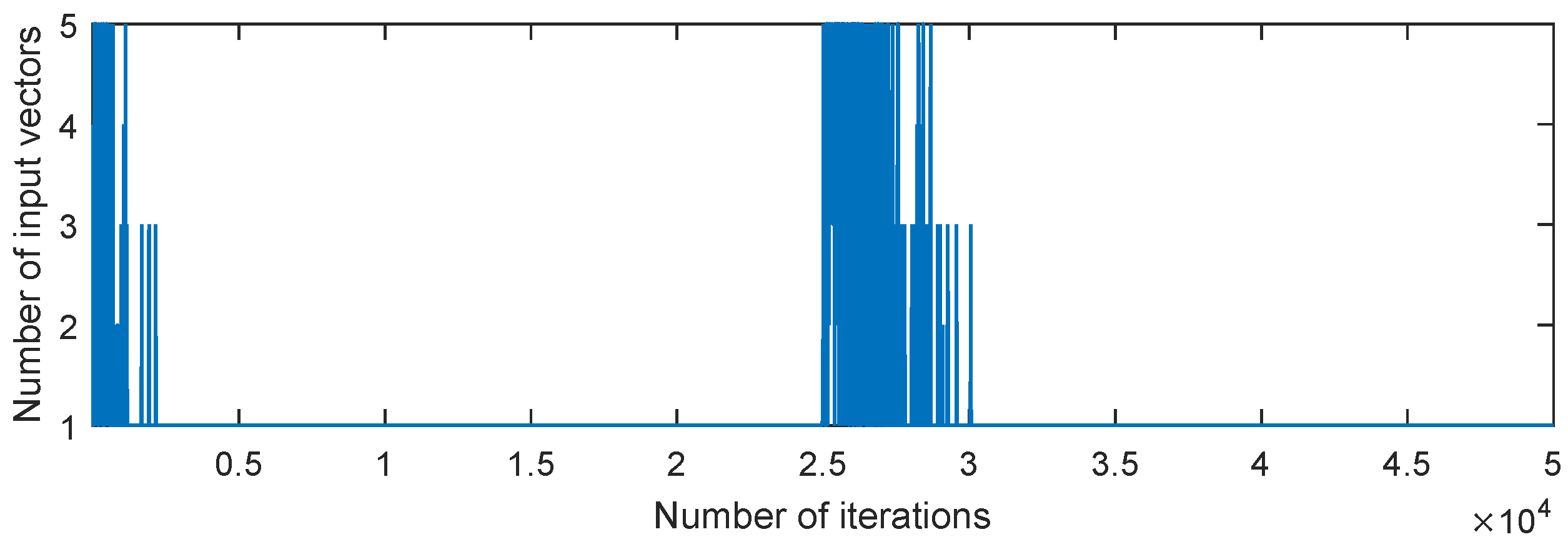
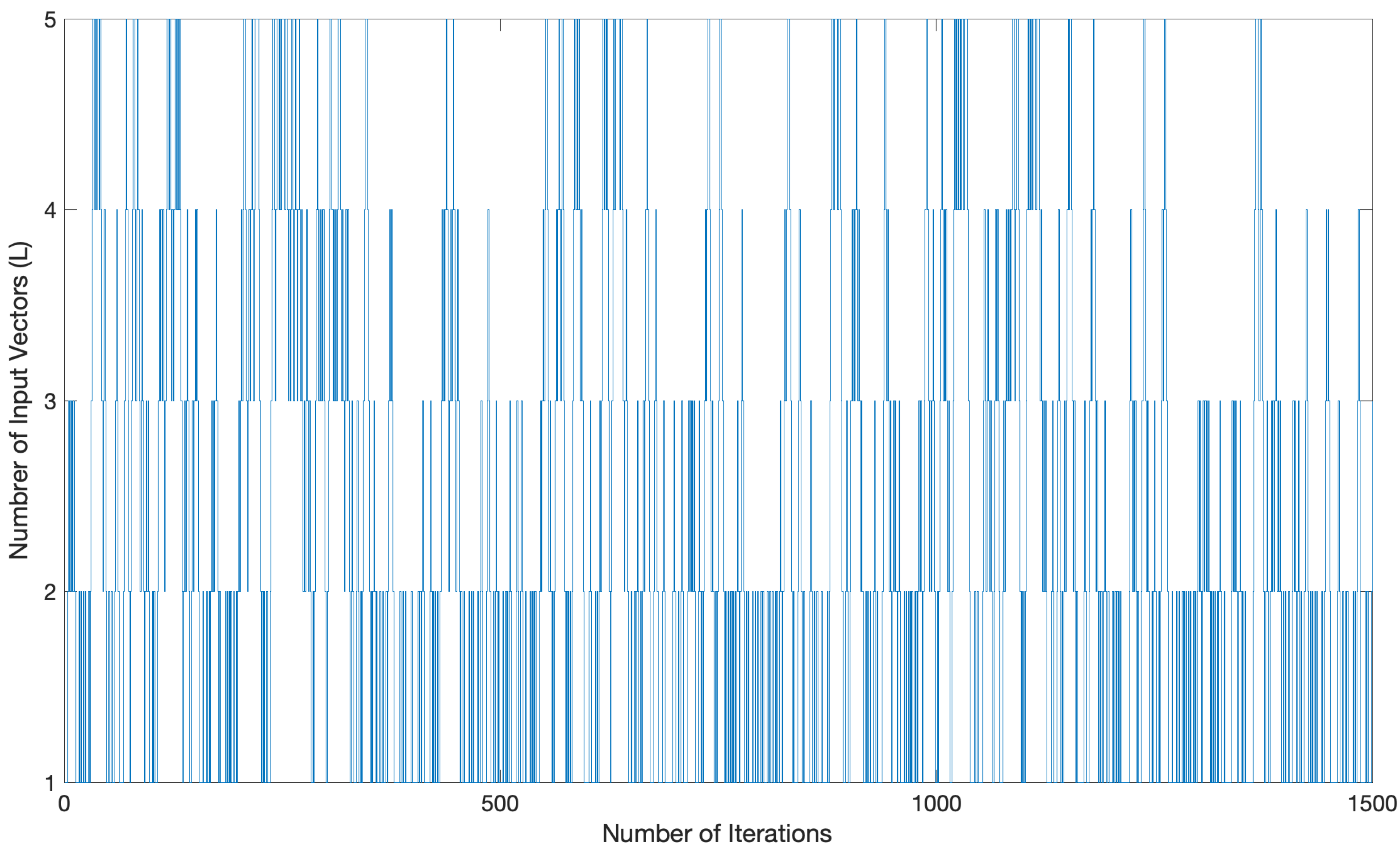
Figure 8 shows only how the projection order changes over time to reduce the computational complexity of the proposed algorithm. Here, the proposed algorithm and the conventional FXECAP-L algorithm exhibit similar behavior.
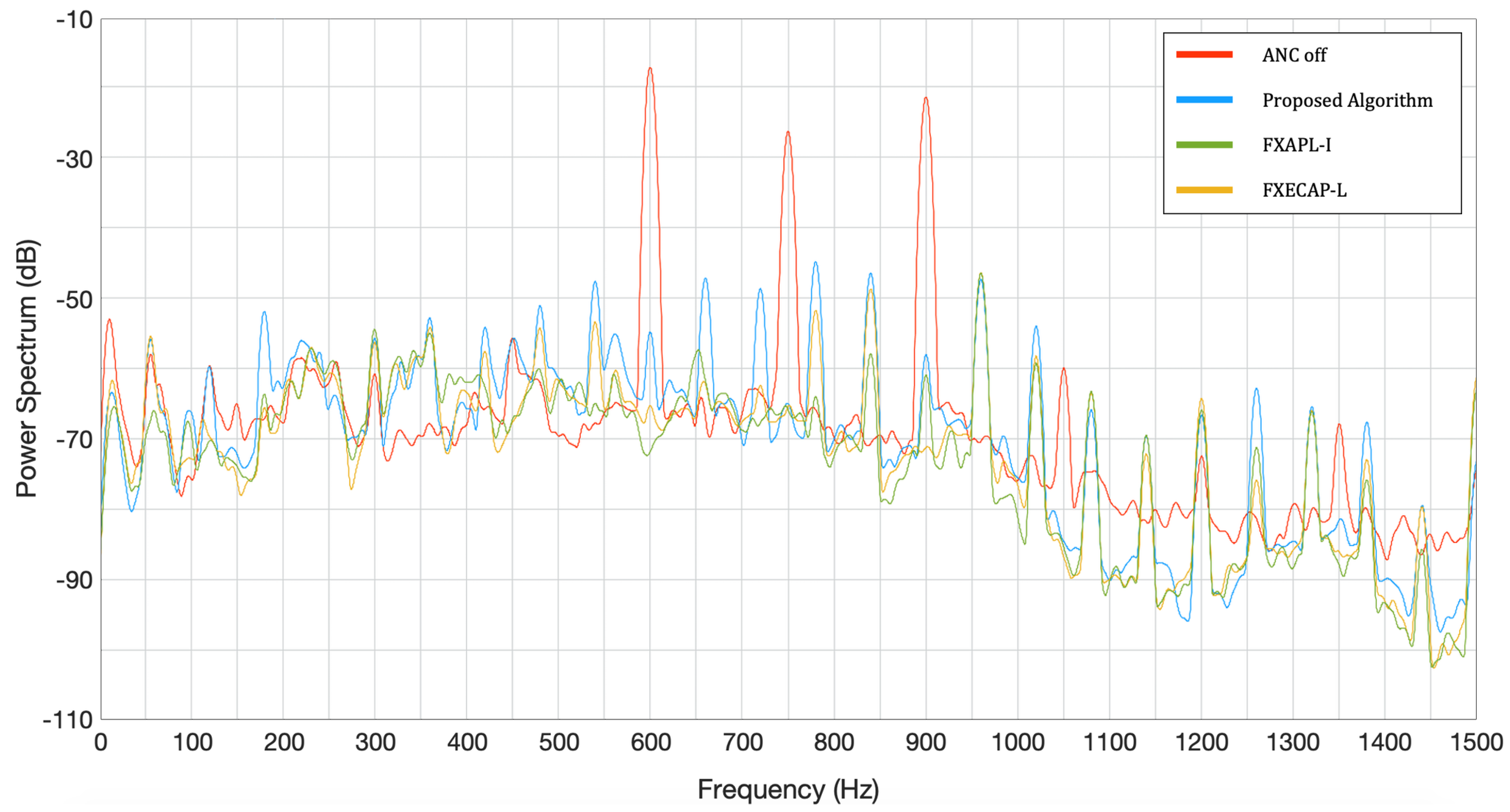
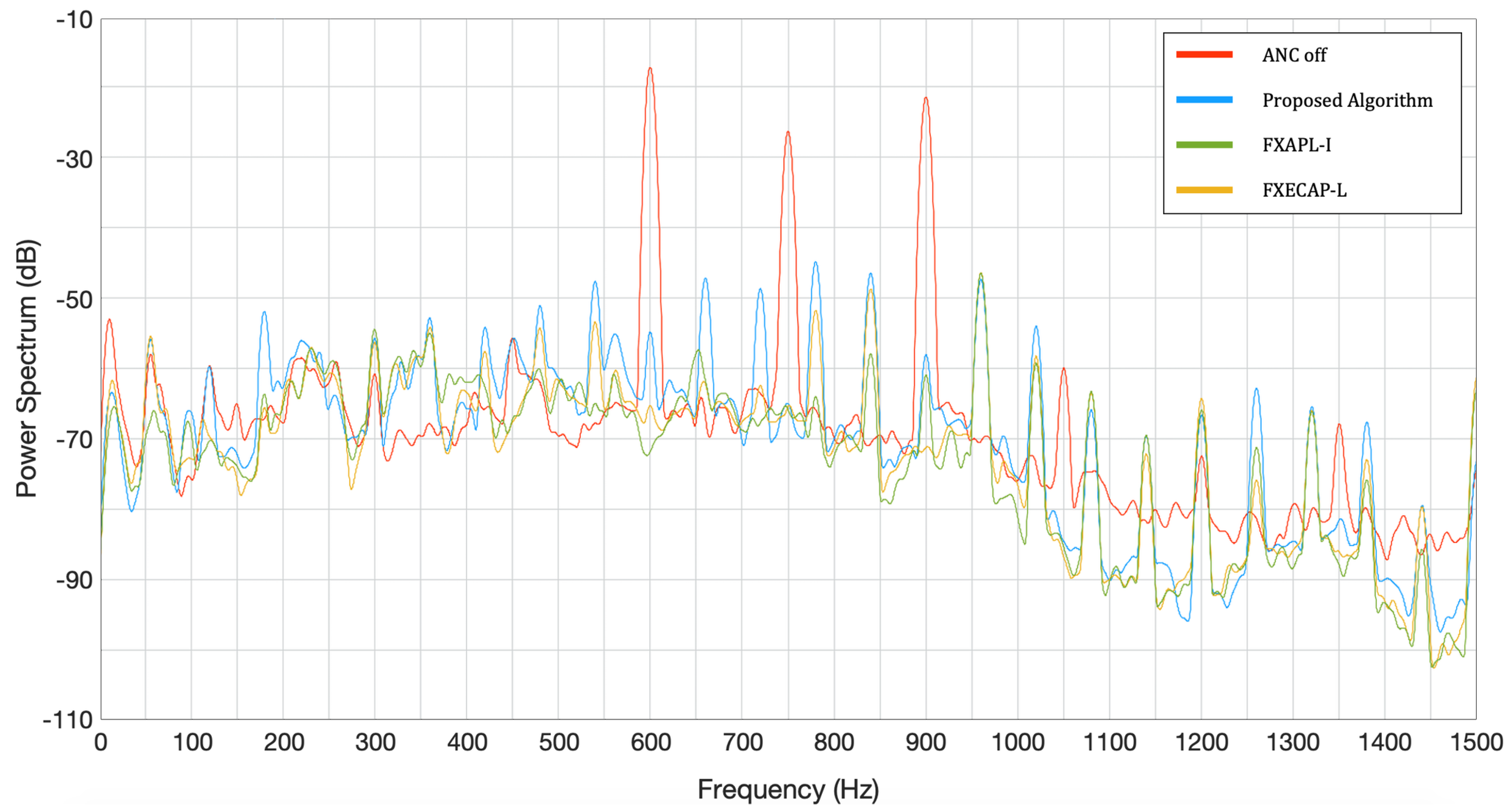
Case 2: Multi-tone as a reference signal
In this case, we compared the FXECAP-L algorithm, the FXAPL-I algorithm and the proposed algorithm.
Figure 9 shows how the proposed algorithm performs the noise cancellation of a multi-tone signal. All of the algorithms effectively cancel multi-tone signals. However, the proposed algorithm and the conventional FXECAP-L algorithm require 51.18% (95,302) and 81% (150,829) fewer updates when compared with the FXAPL-I algorithm. As in the previous case,
Figure 10 shows only the dynamic adjustment of the projection order of the proposed algorithm.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}