Autonomous Operation Method of Multi-DOF Robotic Arm Based on Binocular Vision

 and
and
Abstract
Featured Application
Abstract
1. Introduction
- (1)
- The traditional method of object extraction based on image segmentation is simple to implement, but it has the disadvantages of low robustness and poor universality. The target extraction method based on machine learning ideas is robust and versatile. However, its implementation is complicated and it is difficult to apply it to actual engineering.
- (2)
- The trajectory planning method based on Cartesian space is the common method of motion trajectory planning currently applied to the robotic arm. This method has a large amount of mathematical operations because it is necessary to solve the inverse kinematics equation of the robotic arm to obtain the optimal amount of motion of each joint, so it is difficult to implement in practical engineering.
2. Materials and Methods
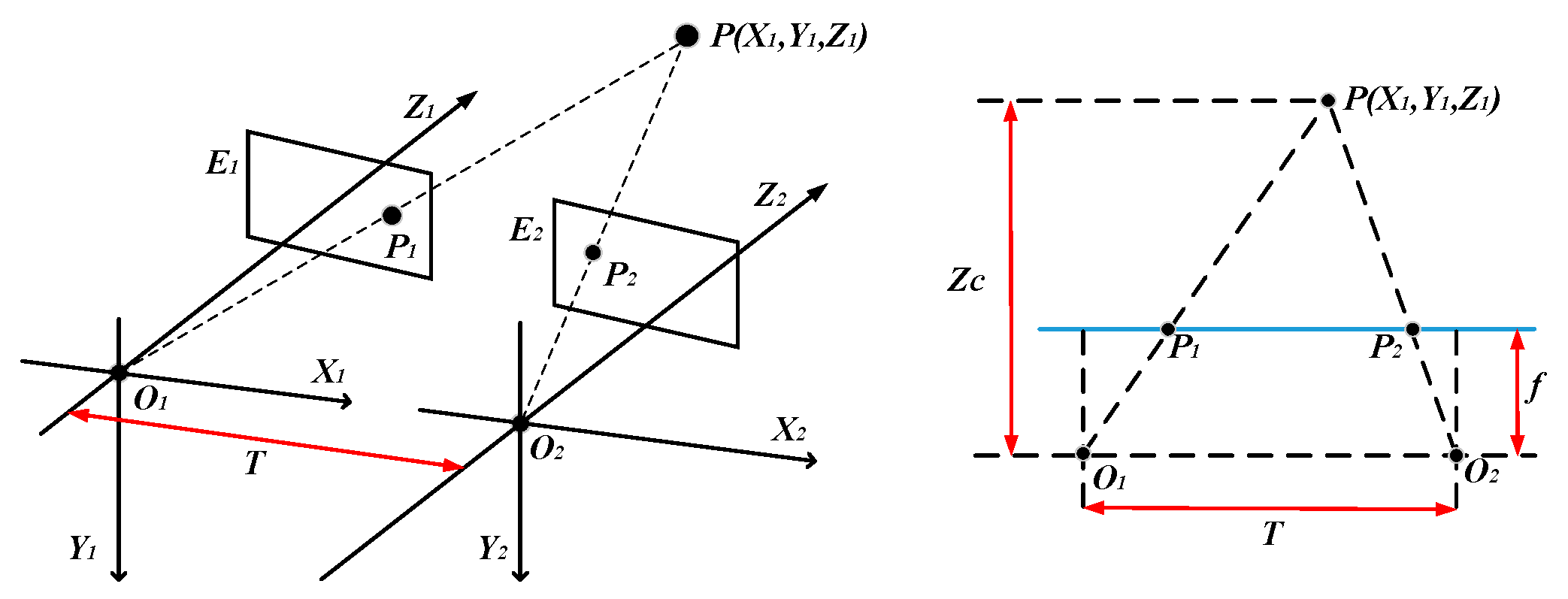
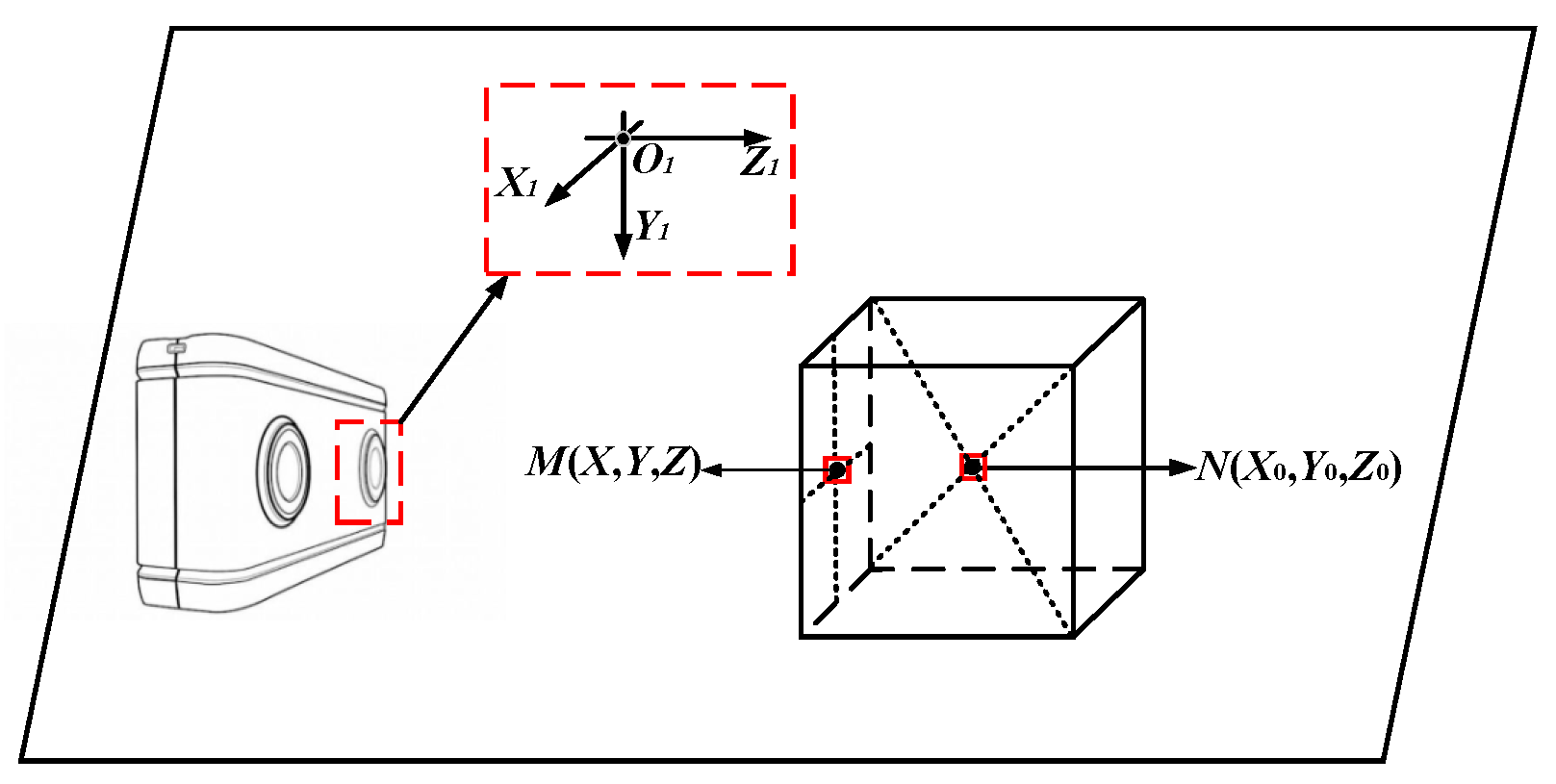
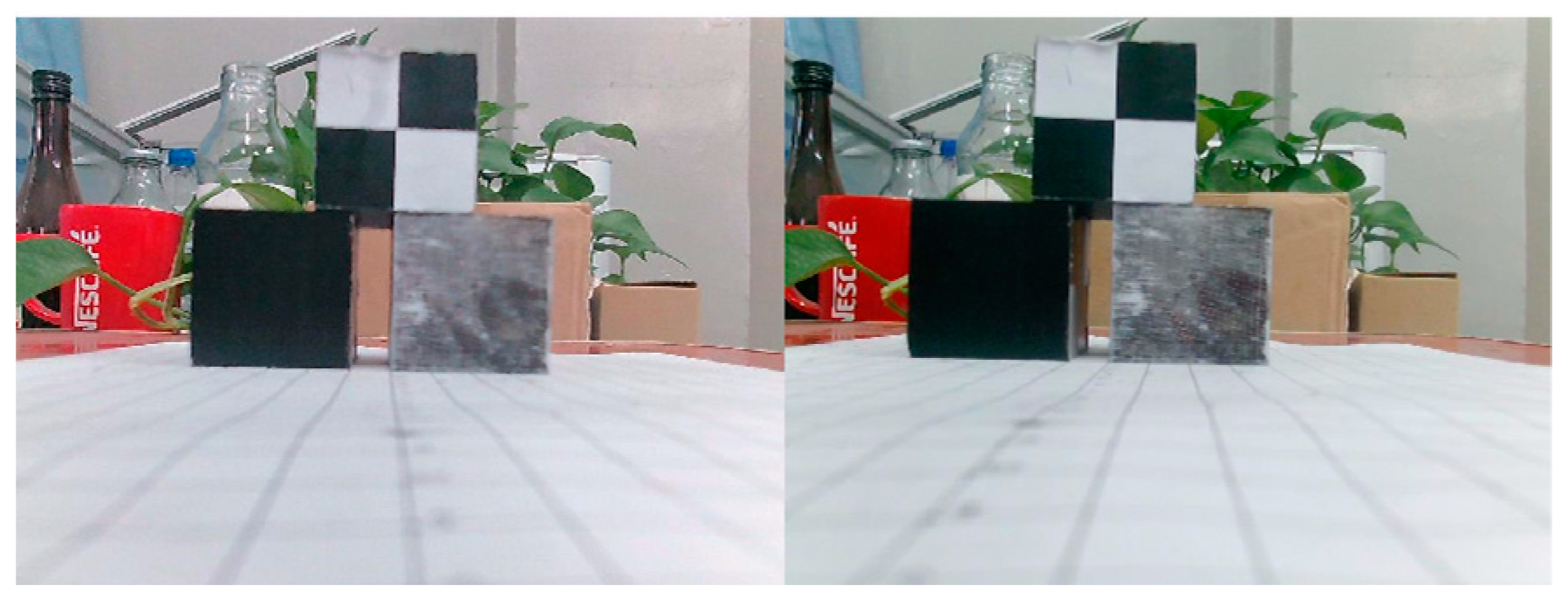
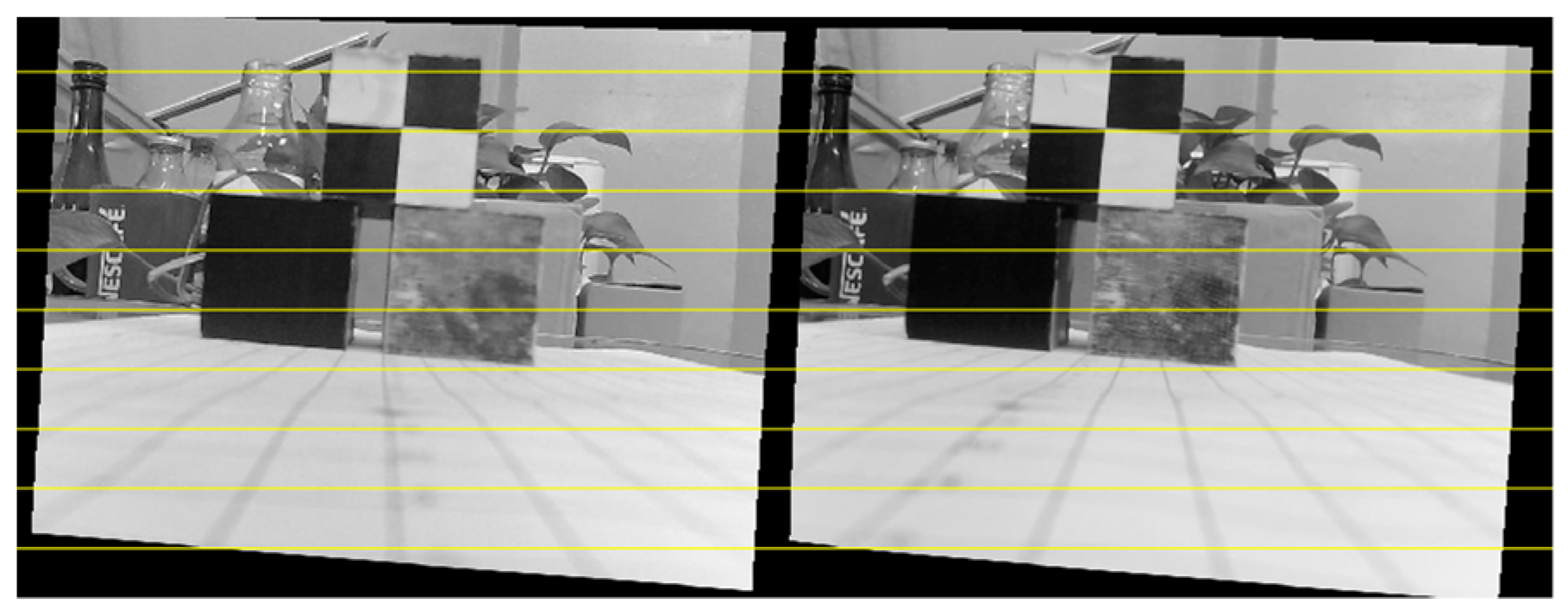
2.1. Binocular Vision Positioning Principle
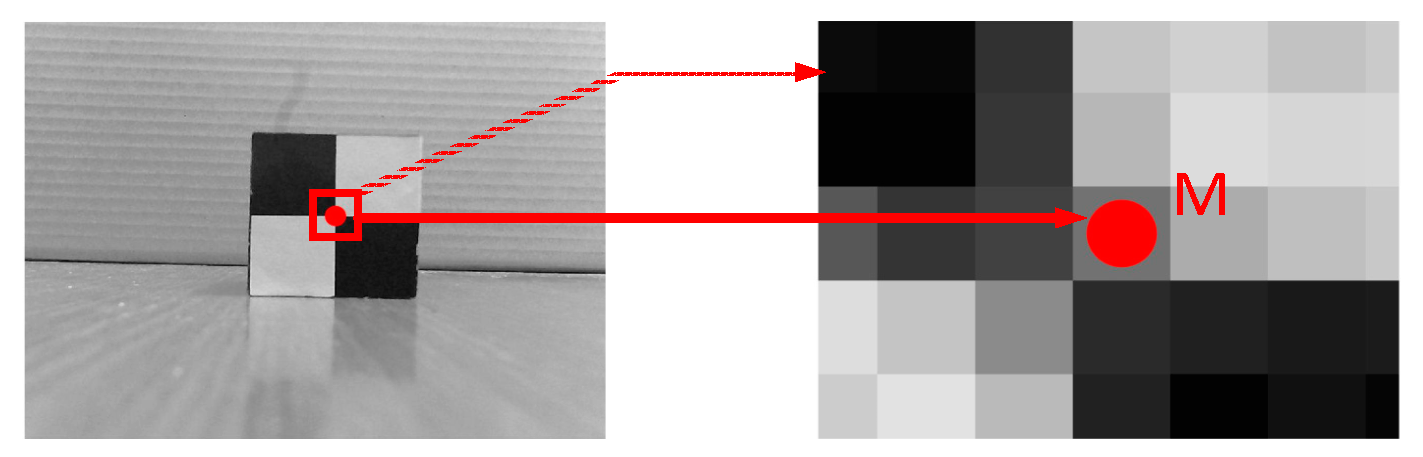
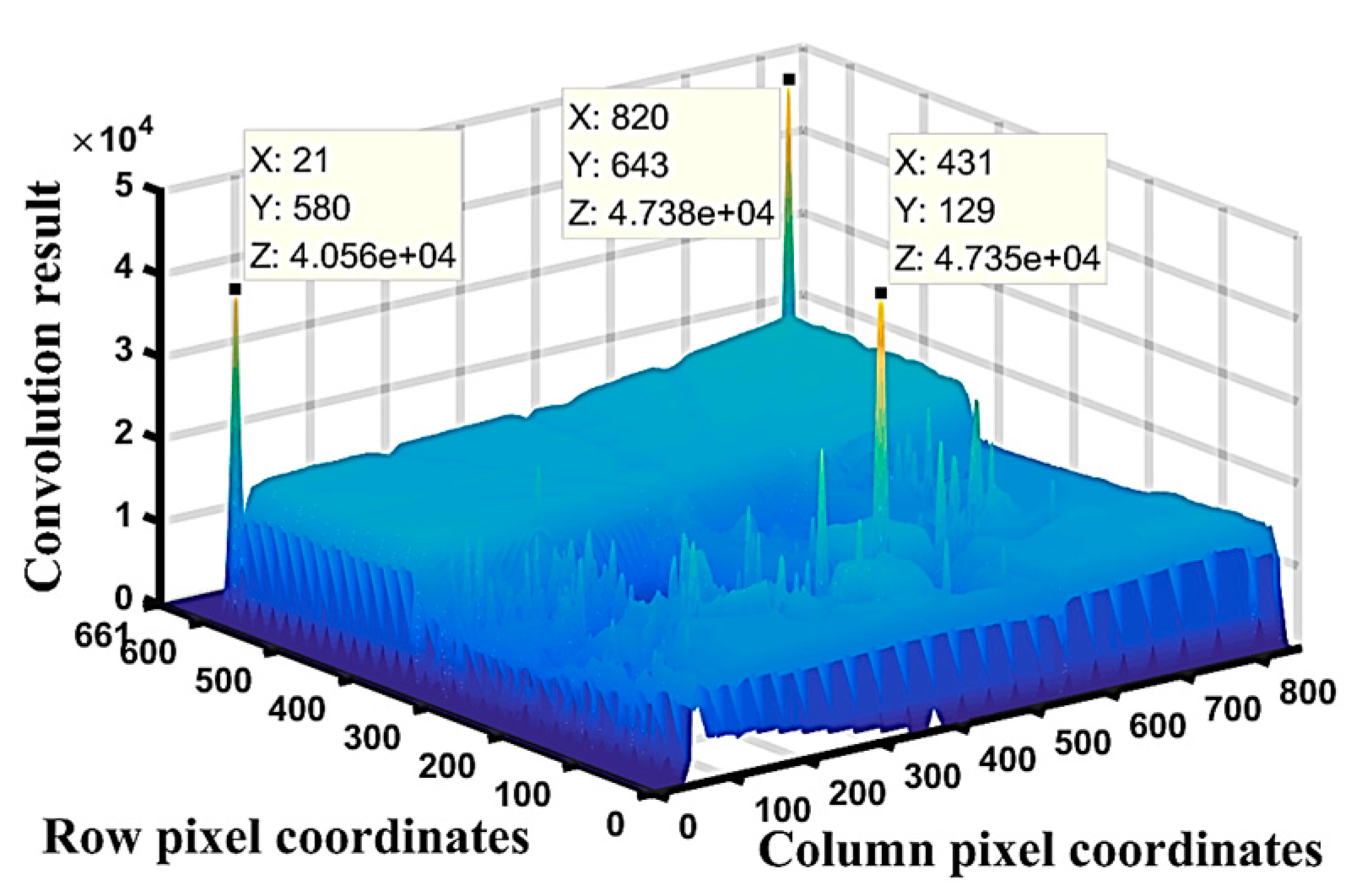
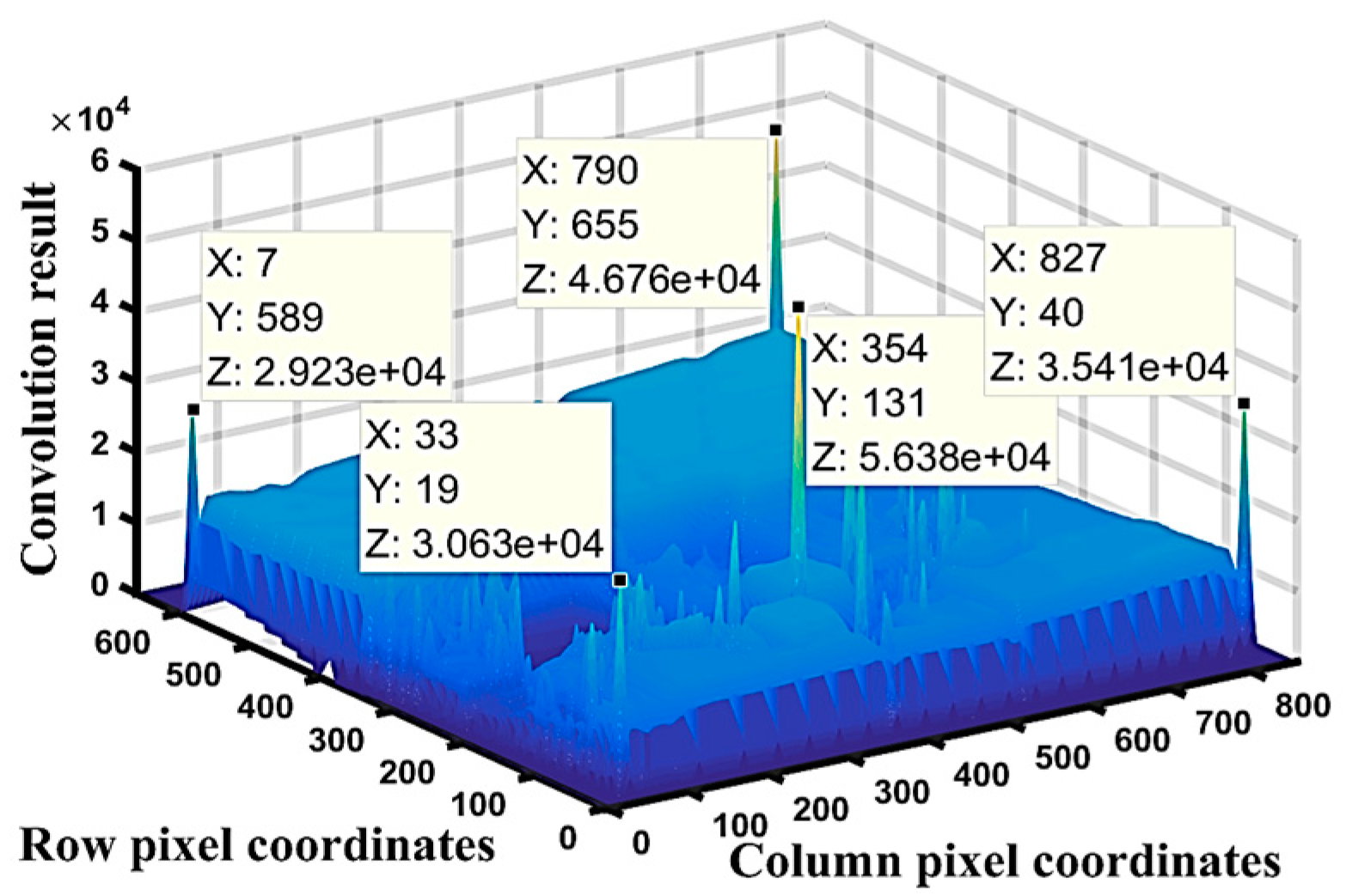
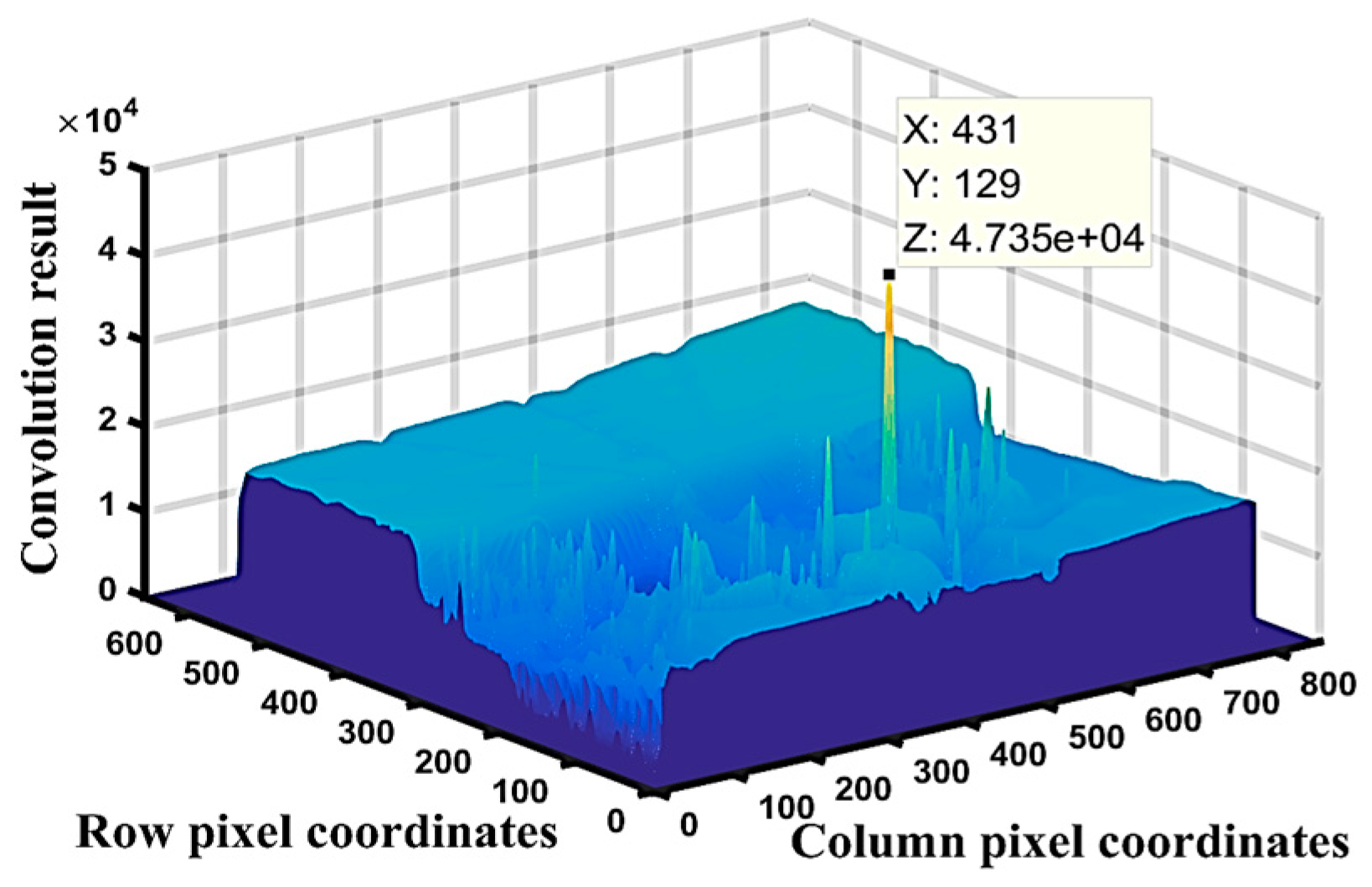
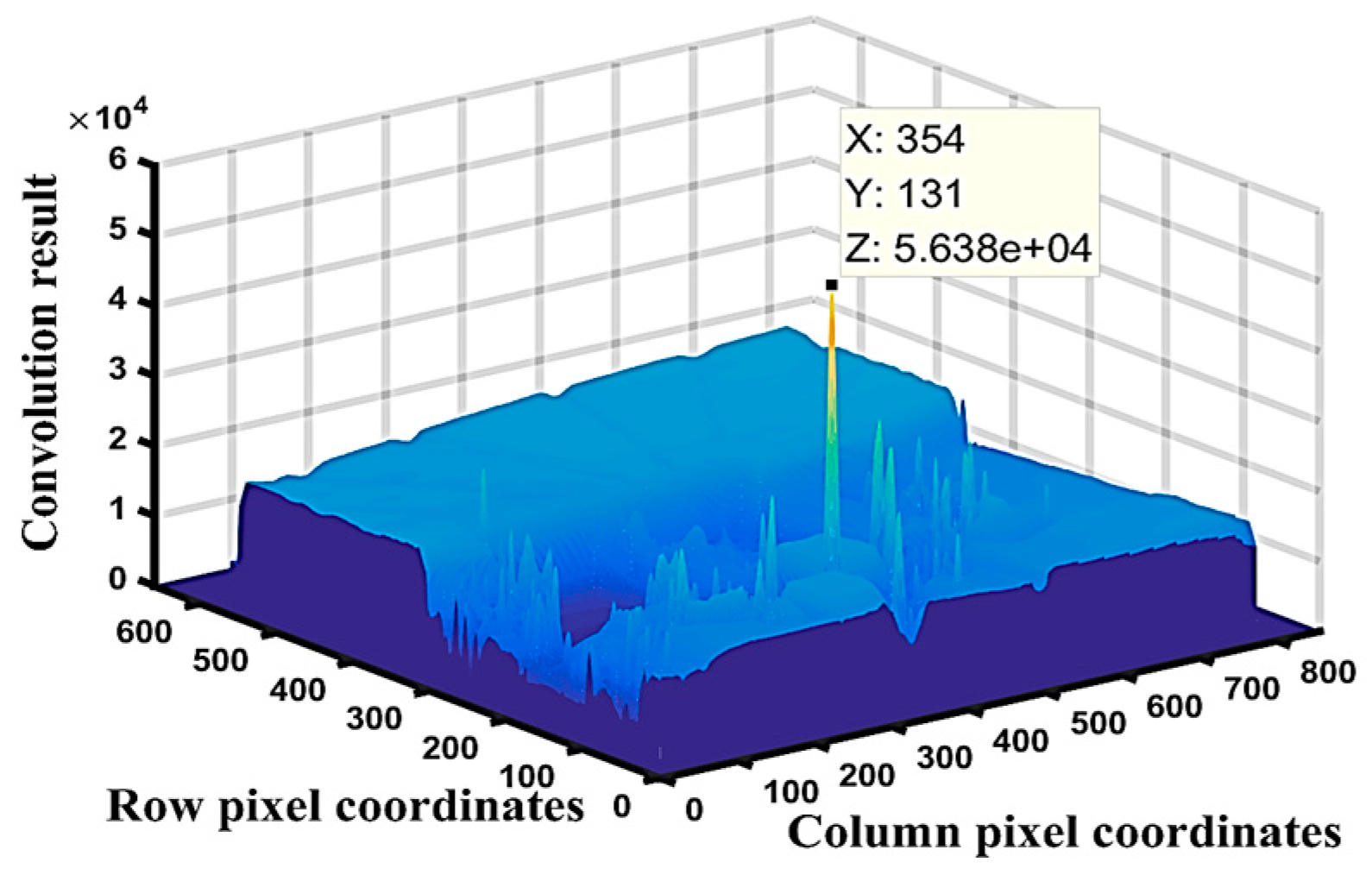
2.2. Target Object Extraction
2.3. Multi-DOF Robotic Arm Trajectory Planning Method
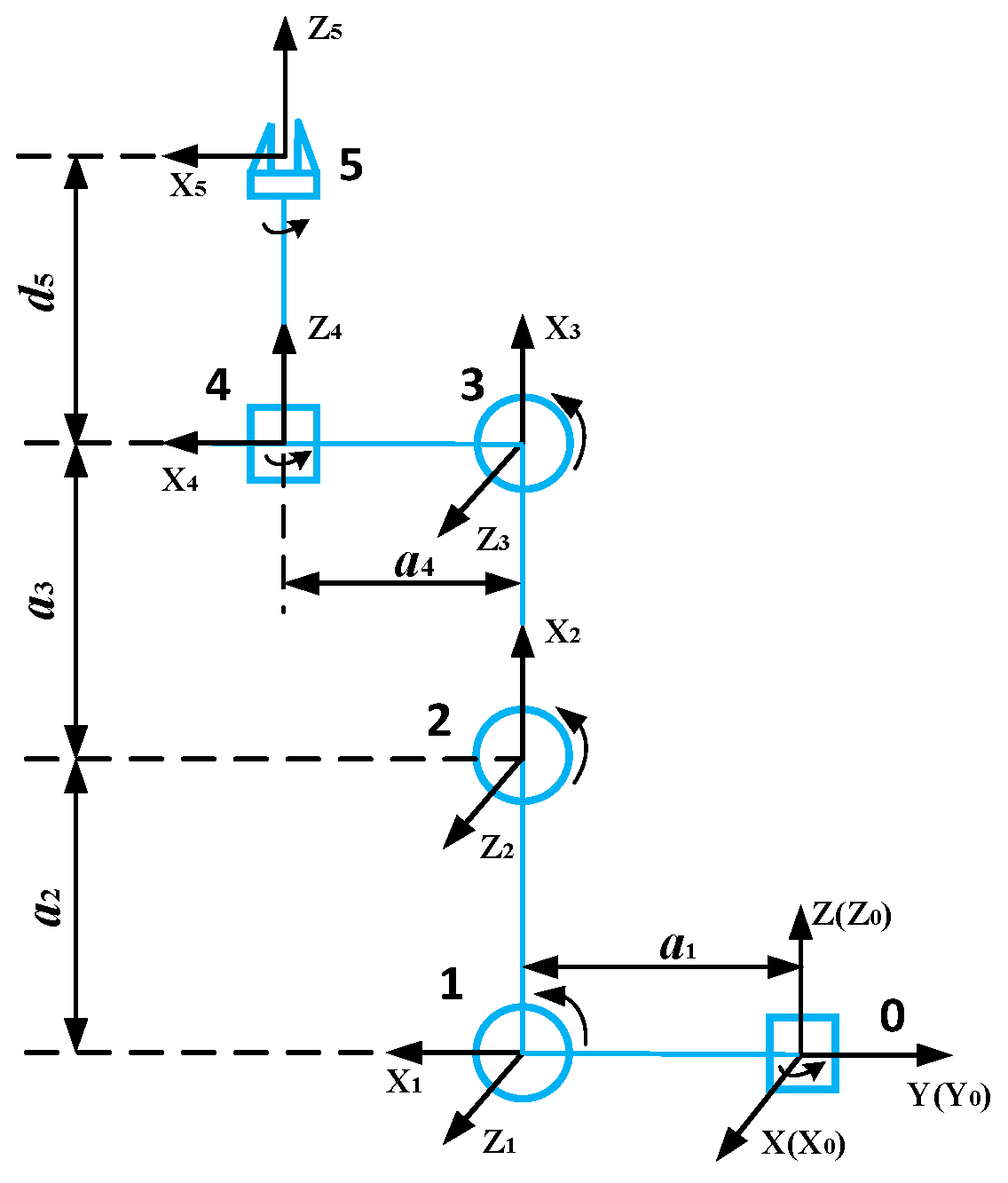
2.3.1. Multi-DOF Robotic Arm Kinematics Modeling
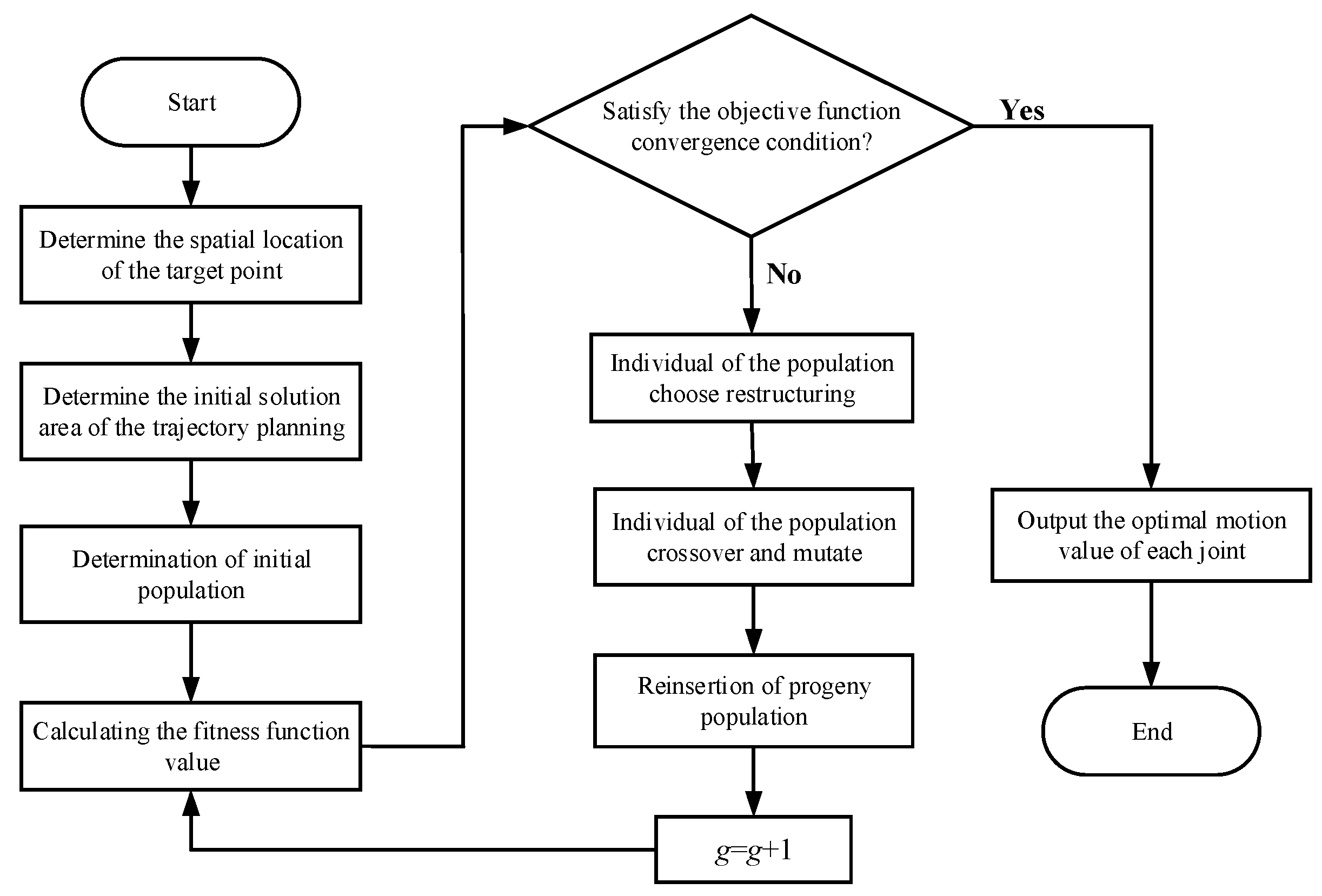
2.3.2. Robotic Arm Motion Trajectory Planning Method Based on Genetic Algorithm
- (1)
- Joint constraint
- (2)
- Connecting rod constraint
3. Results
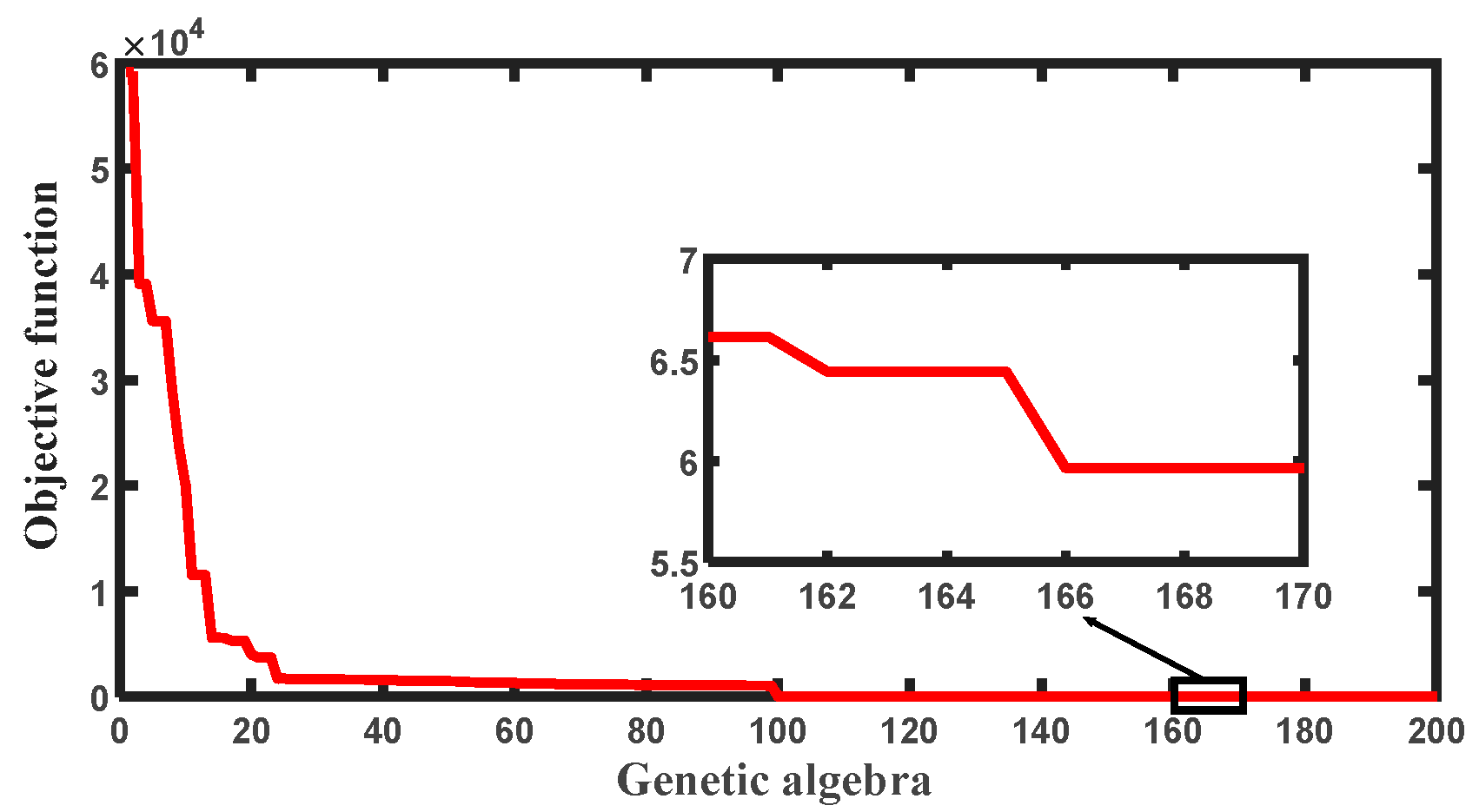
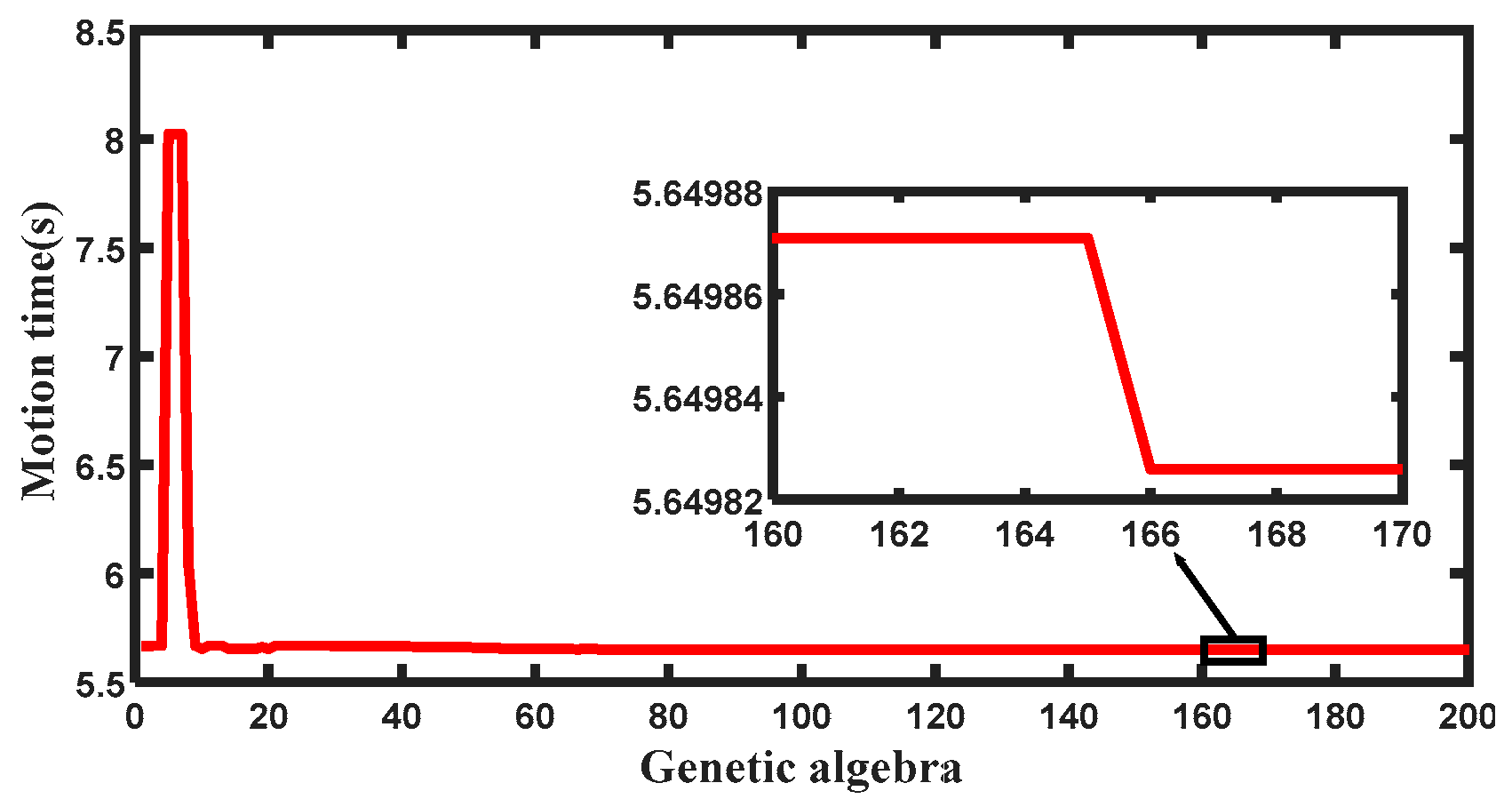
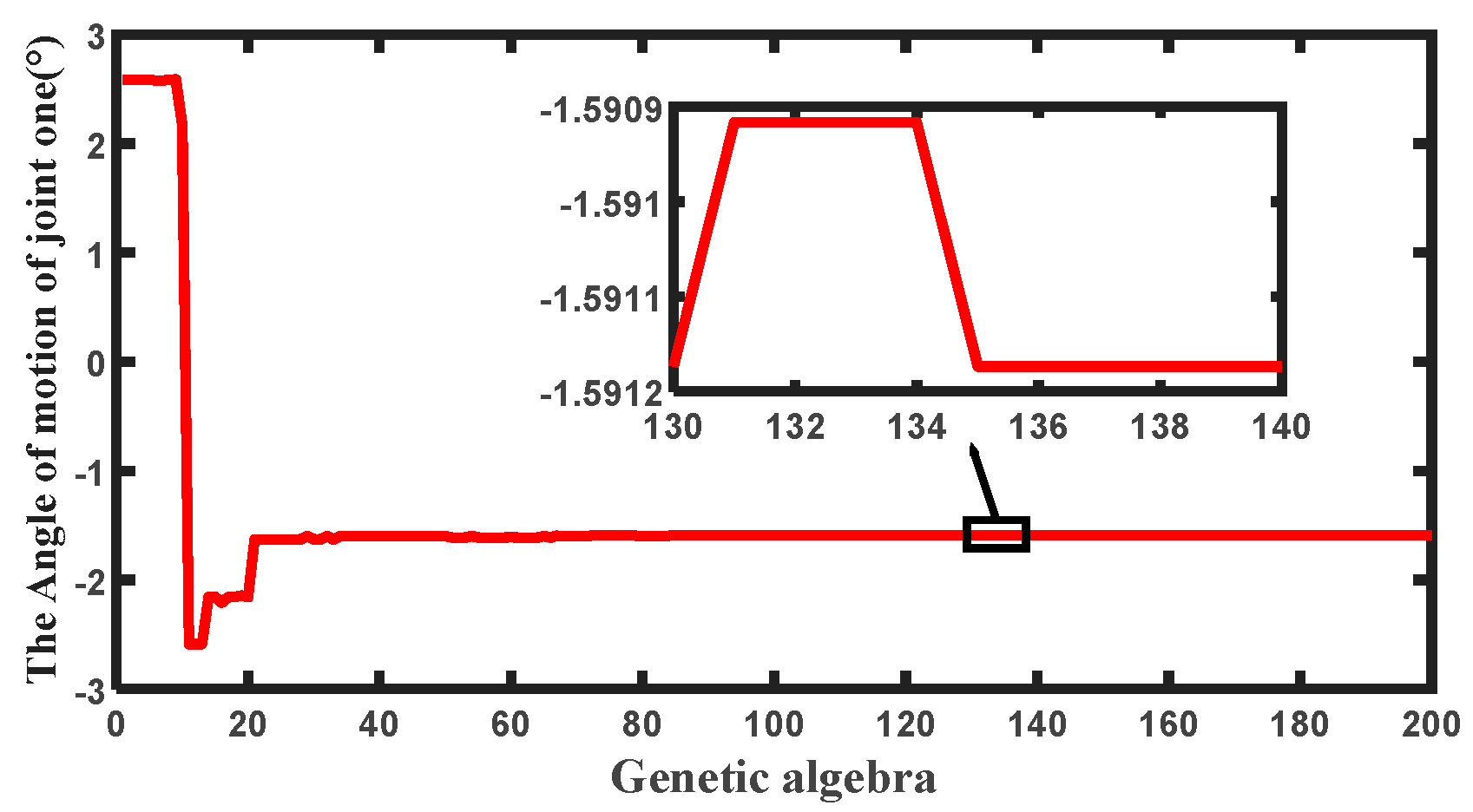
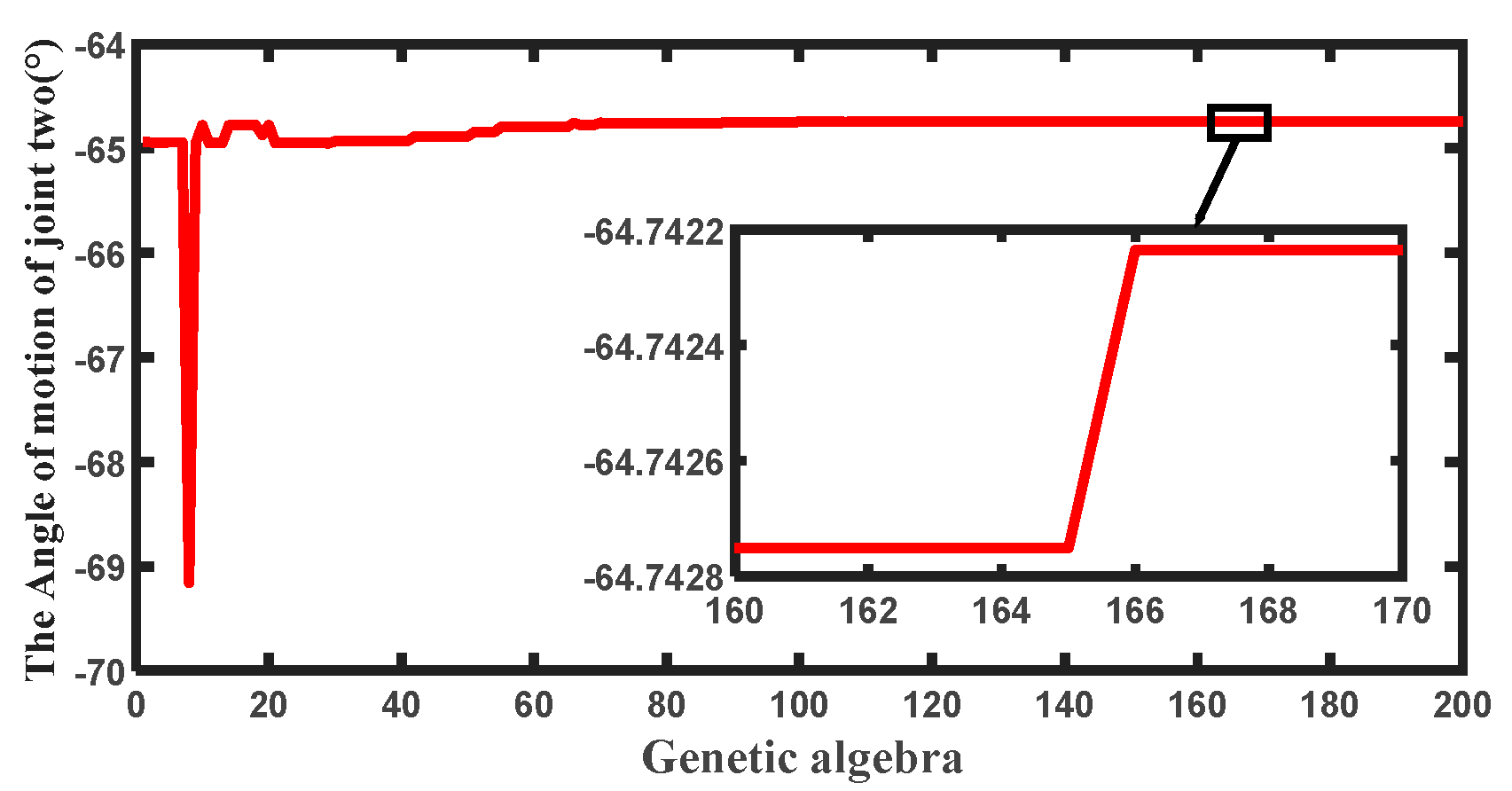
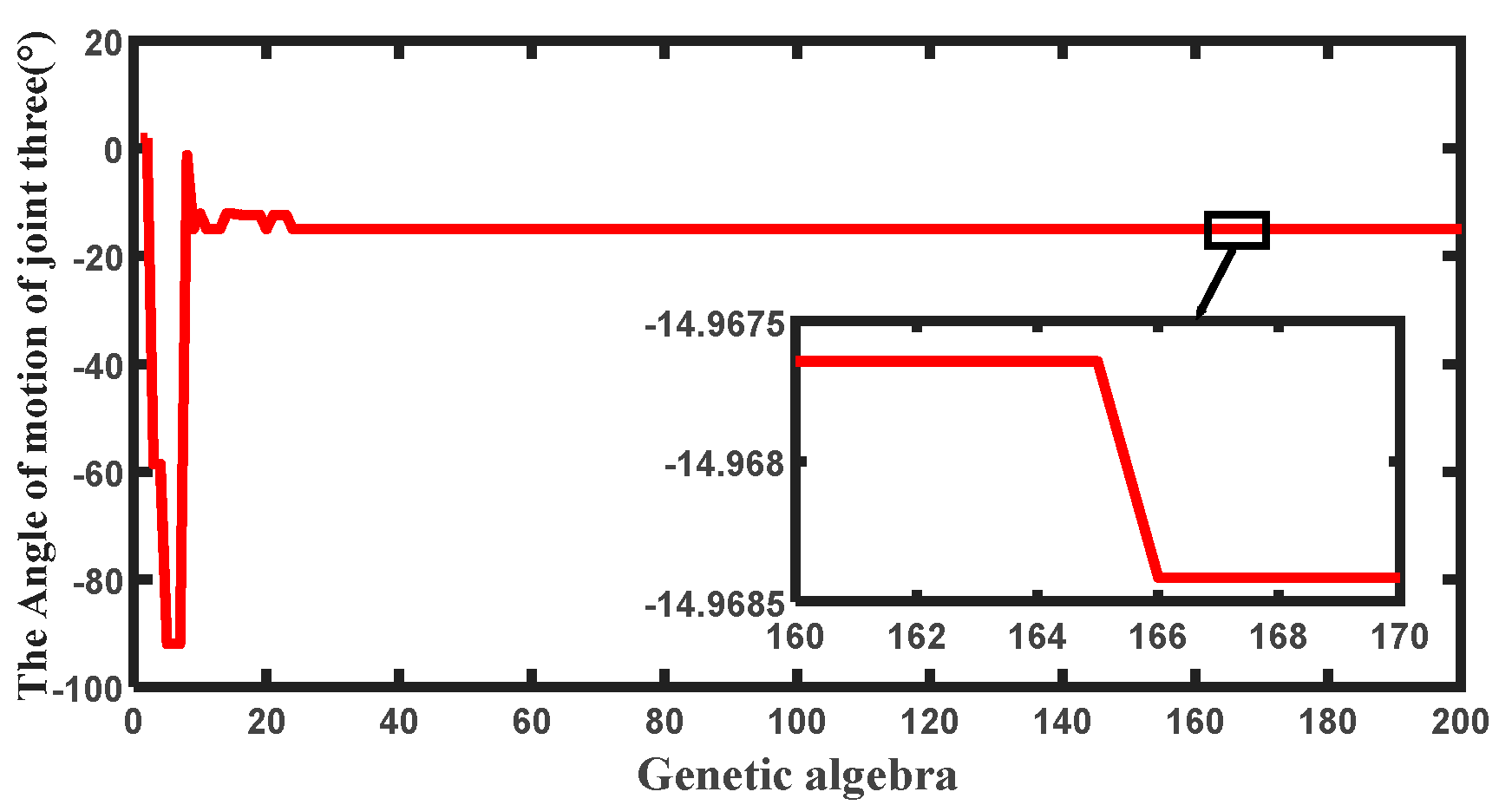
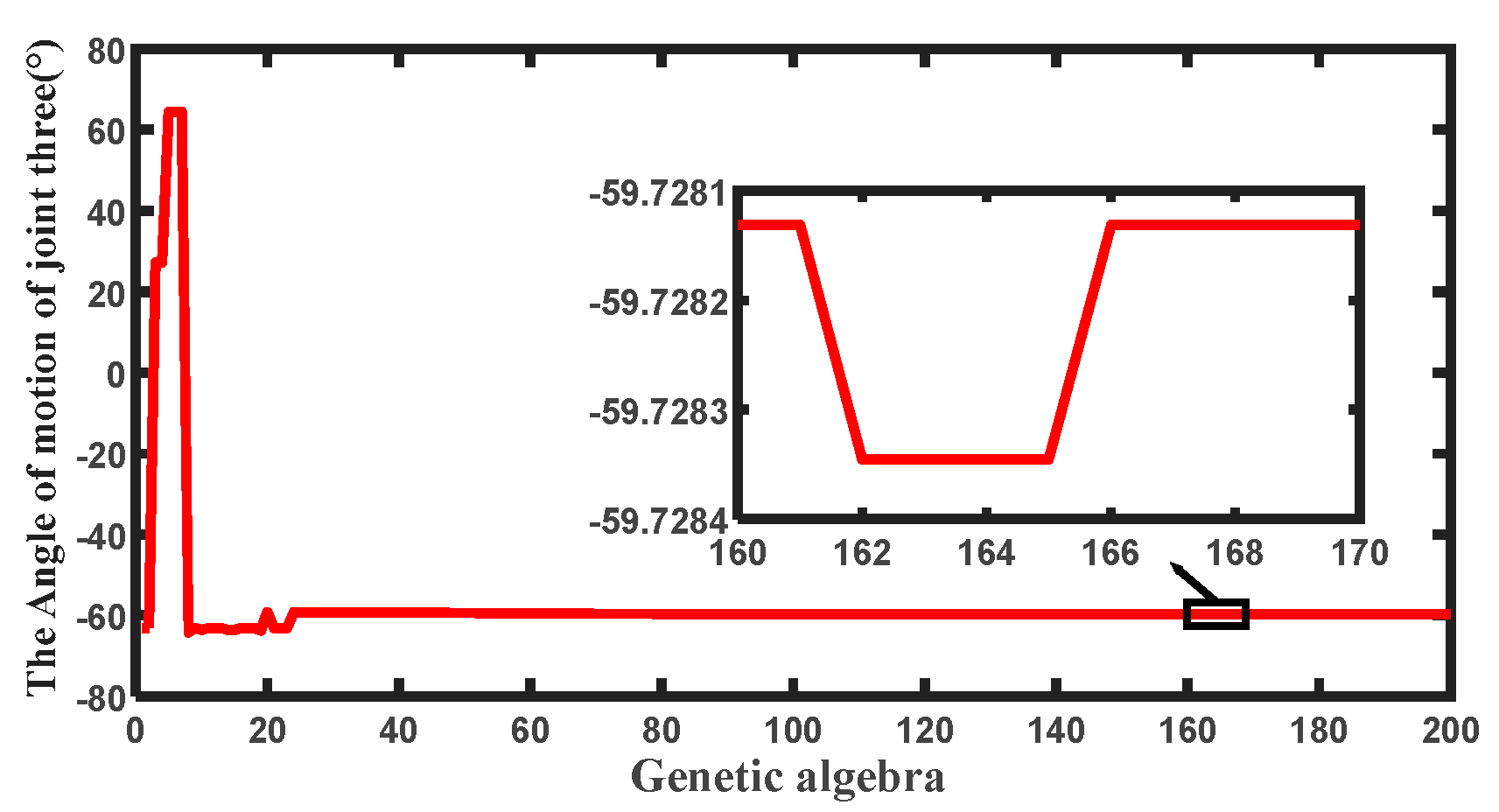
3.1. Simulation Verification of Multi-DOF Robotic Arm Trajectory Planning Method
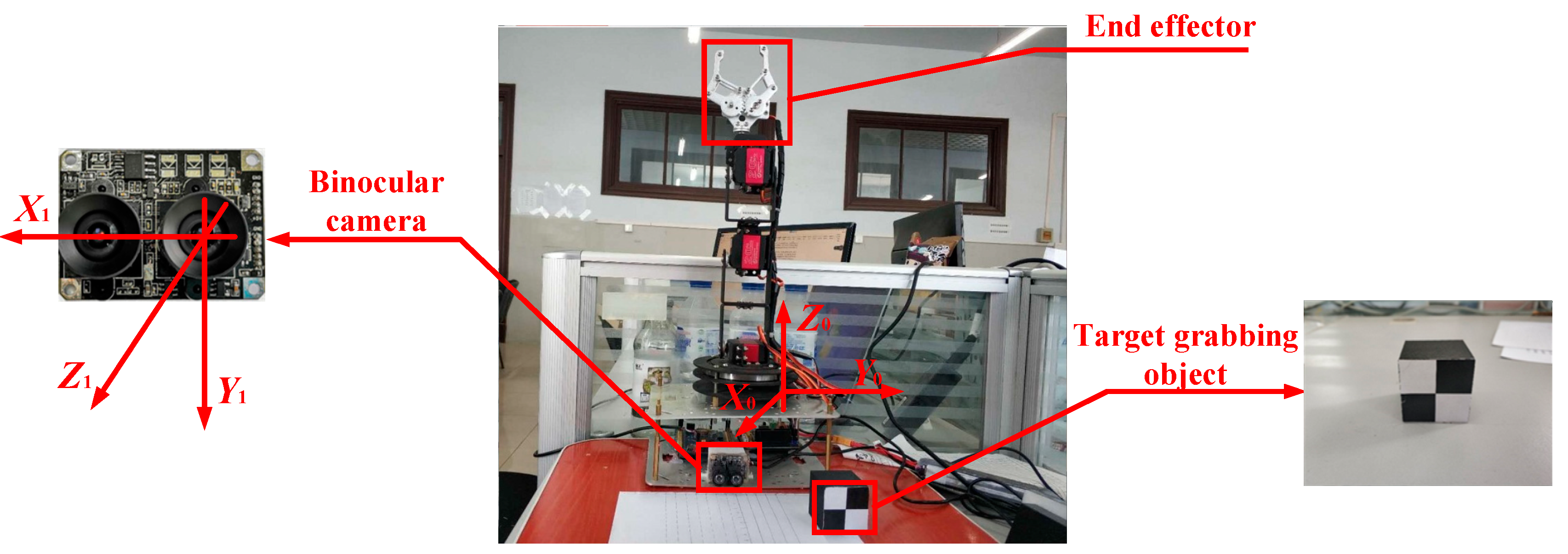
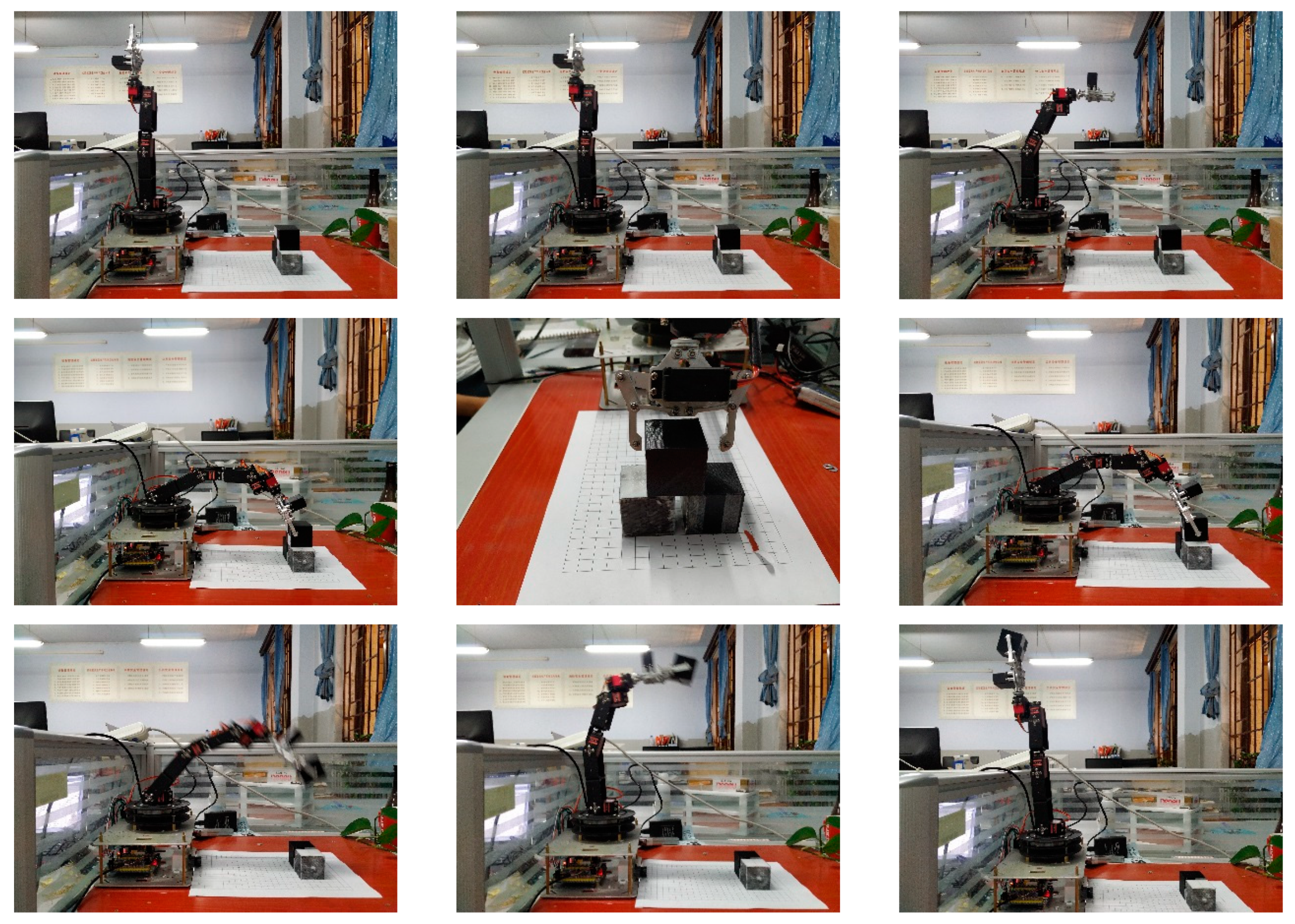
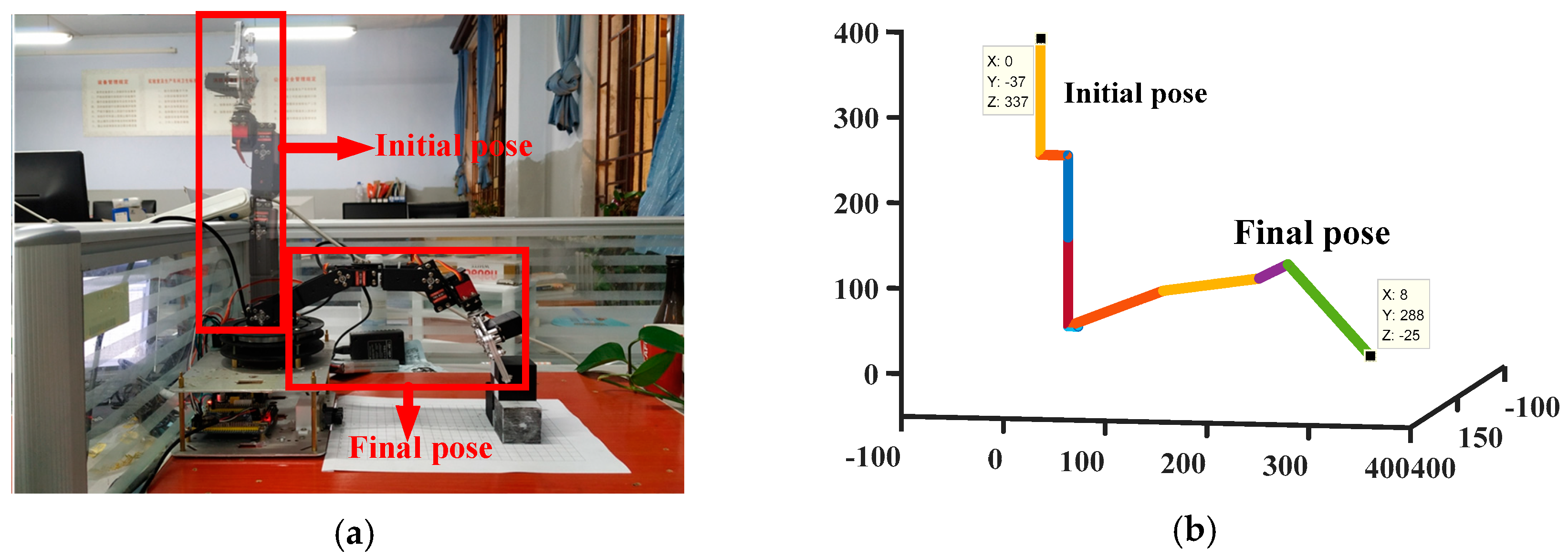
3.2. Experimental Verification of Autonomous Operation Method for Multi-DOF Robotic Arm
4. Discussions
- (1)
- An error occurs in the positioning result of the binocular camera for the centroid point of the target object. This error causes the motion planning trajectory of the robot arm to deviate from the theoretical trajectory, thereby affecting the grabbing of the target object;
- (2)
- The movement of each joint of the robot arm used in the experiment is realized by the steering gear controlled by PWM (Pulse Width Modulation) wave. A deviation occurs between the actual rotation angle of each joint of the robotic arm and the theoretical angle during the motion owing to the insufficient rotation accuracy of the steering gear, which is also the primary reason for failing to grab the target object;
- (3)
- A measurement error is present in the determination of relevant parameters during the experiment, and this error affects the grabbing of the target object.
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y.; Liu, C. A review of key techniques of vision-based control for harvesting robot. Comput. Electron. Agric. 2016, 127, 311–323. [Google Scholar] [CrossRef]
- Ling, X.; Zhao, Y.; Gong, L.; Liu, C.; Wang, T. Dual-arm cooperation and implementing for robotic harvesting tomato using binocular vision. Robot. Auton. Syst. 2019, 114, 134–143. [Google Scholar] [CrossRef]
- Williams, H.A.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Xiong, J.; He, Z.; Lin, R.; Liu, Z.; Bu, R.; Yang, Z.; Peng, H.; Zou, X. Visual positioning technology of picking robots for dynamic litchi clusters with disturbance. Comput. Electron. Agric. 2018, 151, 226–237. [Google Scholar] [CrossRef]
- Wu, Q.; Li, M.; Qi, X.; Hu, Y.; Li, B.; Zhang, J. Coordinated control of a dual-arm robot for surgical instrument sorting tasks. Robot. Auton. Syst. 2019, 112, 1–12. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H.; Zhang, X. Construction waste recycling robot for nails and screws: Computer vision technology and neural network approach. Autom. Constr. 2019, 97, 220–228. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Y.; Zhu, Z.; Li, Z.; Du, Y.; Mao, E. Tractor path tracking control based on binocular vision. Inf. Process. Agric. 2018, 5, 422–432. [Google Scholar] [CrossRef]
- Zhao, S.; Kang, F.; Li, J. Displacement monitoring for slope stability evaluation based on binocular vision systems. Optik 2018, 171, 658–671. [Google Scholar] [CrossRef]
- Tang, Y.C.; Li, L.J.; Feng, W.X.; Liu, F.; Zou, X.J.; Chen, M.Y. Binocular vision measurement and its application in full-field convex deformation of concrete-filled steel tubular columns. Measurement 2018, 130, 372–383. [Google Scholar] [CrossRef]
- Liu, W.; Li, X.; Jia, Z.; Li, H.; Ma, X.; Yan, H.; Ma, J. Binocular-vision-based error detection system and identification method for PIGEs of rotary axis in five-axis machine tool. Precis. Eng. 2018, 51, 208–222. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, Y.; Zhu, Y.; Xu, H.; Wen, L.; Meng, Q. Blind assessment for stereo images considering binocular characteristics and deep perception map based on deep belief network. Inf. Sci. 2019, 474, 1–17. [Google Scholar] [CrossRef]
- Zhai, Z.; Zhu, Z.; Du, Y.; Song, Z.; Mao, E. Multi-crop-row detection algorithm based on binocular vision. Biosyst. Eng. 2016, 150, 89–103. [Google Scholar] [CrossRef]
- Rebouças Filho, P.P.; da Silva, S.P.P.; Praxedes, V.N.; Hemanth, J.; de Albuquerque, V.H.C. Control of singularity trajectory tracking for robotic manipulator by genetic algorithms. J. Comput. Sci. 2019, 30, 55–64. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Yuan, J.; Walter, U. Coordinated trajectory planning of dual-arm space robot using constrained particle swarm optimization. Acta Astronaut. 2018, 146, 259–272. [Google Scholar] [CrossRef]
- FarzanehKaloorazi, M.H.; Bonev, I.A.; Birglen, L. Simultaneous path placement and trajectory planning optimization for a redundant coordinated robotic workcell. Mech. Mach. Theory 2018, 130, 346–362. [Google Scholar] [CrossRef]
- Xie, Y.; Wu, X.; Inamori, T.; Shi, Z.; Sun, X.; Cui, H. Compensation of base disturbance using optimal trajectory planning of dual-manipulators in a space robot. Adv. Space Res. 2019, 63, 1147–1160. [Google Scholar] [CrossRef]
- Xuan, G.; Shao, Y. Reverse-driving Trajectory Planning and Simulation of Joint Robot. IFAC-PapersOnLine 2018, 51, 384–388. [Google Scholar] [CrossRef]
- Huang, J.; Hu, P.; Wu, K.; Min, Z. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Elkasem, A.H.A.; Kamel, S.; Rashad, A.; Jurado, F. Optimal Performance of Doubly Fed Induction Generator Wind Farm Using Multi-Objective Genetic Algorithm. Int. J. Interact. Multimed. Artif. Intell. 2019, 5, 48–53. [Google Scholar] [CrossRef]
- Kasihmuddi, M.S.; Mansor, M.A.; Sathasivam, S. Genetic Algorithm for Restricted Maximum k-Satisfiability in the Hopfield Network. Int. J. Interact. Multimed. Artif. Intell. 2016, 4, 52–60. [Google Scholar]
- Lv, X.; Yu, Z.; Liu, M.; Zhang, G.; Zhang, L. Direct trajectory planning method based on iepso and fuzzy rewards and punishment theory for multi-degree-of freedom manipulators. IEEE Access 2019, 7, 20452–20461. [Google Scholar] [CrossRef]
- Salvador, C.G.; Verdú, E.; Herrera-Viedma, E.; Crespo, R.G. Fuzzy logic expert system for selecting robotic hands using kinematic parameters. J. Ambient Intell. Humaniz. Comput. 2019, 1–12. [Google Scholar] [CrossRef]
- García, C.G.; Núñez-Valdez, E.R.N.; García-Díaz, V.; Pelayo G-Bustelo, C.; Cueva-Lovelle, J.M. A Review of Artificial Intelligence in the Internet of Things. Int. J. Interact. Multimed. Artif. Intell. 2019, 5, 9–20. [Google Scholar]
- Sudin, M.N.; Abdullah, S.S.; Nasudin, M.F. Humanoid Localization on Robocup Field using Corner Intersection and Geometric Distance Estimation. Int. J. Interact. Multimed. Artif. Intell. 2019, 5, 50–56. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint Number | Initial Angle of θi (°) | Range of θi (°) | di (mm) | ai (mm) | αi (°) |
|---|---|---|---|---|---|
| 1 | −90 | −135~135 | 0 | 10 | −90 |
| 2 | −90 | −90~90 | 0 | 104 | 0 |
| 3 | 0 | −135~135 | 0 | 96 | 0 |
| 4 | 90 | −135~135 | 0 | 27 | 90 |
| 5 | 0 | −180~180 | 137 | 0 | 0 |
| Parameter | Numerical Value |
|---|---|
| Population size (N) | 100 |
| Maximum genetic algebra (gmax) | 200 |
| Recombination crossover probability (Pc) | 0.7 |
| Mutation probability (Pm) | 0.5 |
| Optimization weight coefficient (α) | 1 |
| Optimization weight coefficient (β) | 100 |
| Penalty parameter (γ) | 1000 |
| Objective function convergence accuracy | 10−5 |
| Joint Number | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Ci (°) | −1.59117 | −64.7422 | −14.9684 | −59.7281 |
| Error | Maximum (mm) | Minimum (mm) |
|---|---|---|
| X1 | 8.02 | 0.004 |
| Y1 | 5.5 | 0.002 |
| Z1 | 6.03 | 0.003 |
| Positioning relative error | 6.60% | 1.19% |
| List | Y0 | Z0 |
|---|---|---|
| Maximum error (mm) | 30 | 21 |
| Minimum error (mm) | 1 | 2 |
| Error mean (mm) | 14.0 | |
| Error variance (mm) | 6.5 | |
| Grab success rate | 83% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Lv, X.; Lin, J.; Ma, J.; Zhang, G.; Zhang, L. Autonomous Operation Method of Multi-DOF Robotic Arm Based on Binocular Vision. Appl. Sci. 2019, 9, 5294. https://doi.org/10.3390/app9245294
Fan Y, Lv X, Lin J, Ma J, Zhang G, Zhang L. Autonomous Operation Method of Multi-DOF Robotic Arm Based on Binocular Vision. Applied Sciences. 2019; 9(24):5294. https://doi.org/10.3390/app9245294
Chicago/Turabian StyleFan, Yiyao, Xueying Lv, Jun Lin, Jianhang Ma, Guanyu Zhang, and Liu Zhang. 2019. "Autonomous Operation Method of Multi-DOF Robotic Arm Based on Binocular Vision" Applied Sciences 9, no. 24: 5294. https://doi.org/10.3390/app9245294
APA StyleFan, Y., Lv, X., Lin, J., Ma, J., Zhang, G., & Zhang, L. (2019). Autonomous Operation Method of Multi-DOF Robotic Arm Based on Binocular Vision. Applied Sciences, 9(24), 5294. https://doi.org/10.3390/app9245294