Experimental Study on Vertical Shear Behaviors of an Immersion Joint with Steel Shear Keys




Abstract
:1. Introduction
2. Experimental Design
2.1. Immersion Joint Model
2.1.1. Element Model
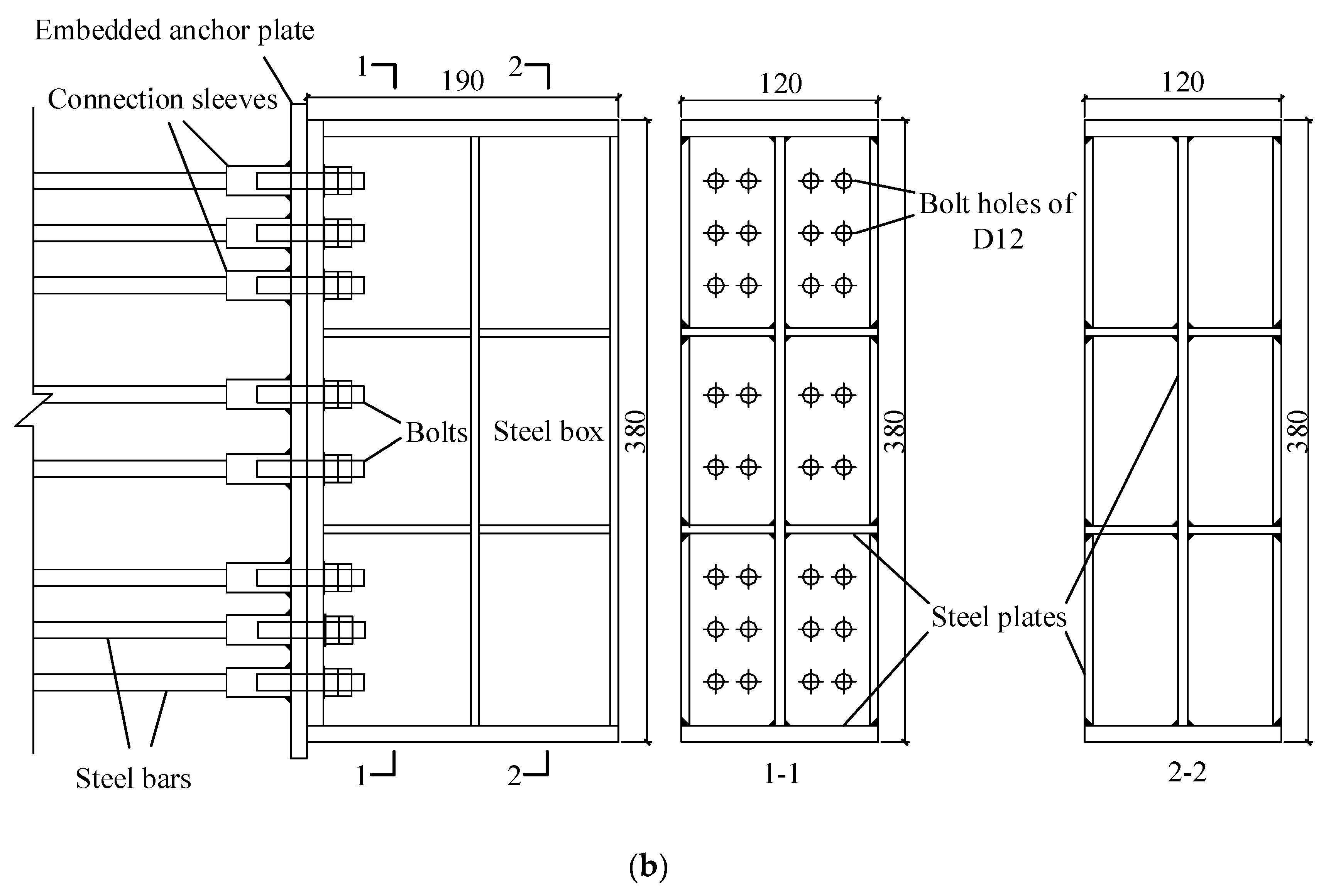
2.1.2. Vertical Steel Shear Keys
2.1.3. Transverse Concrete Shear Keys
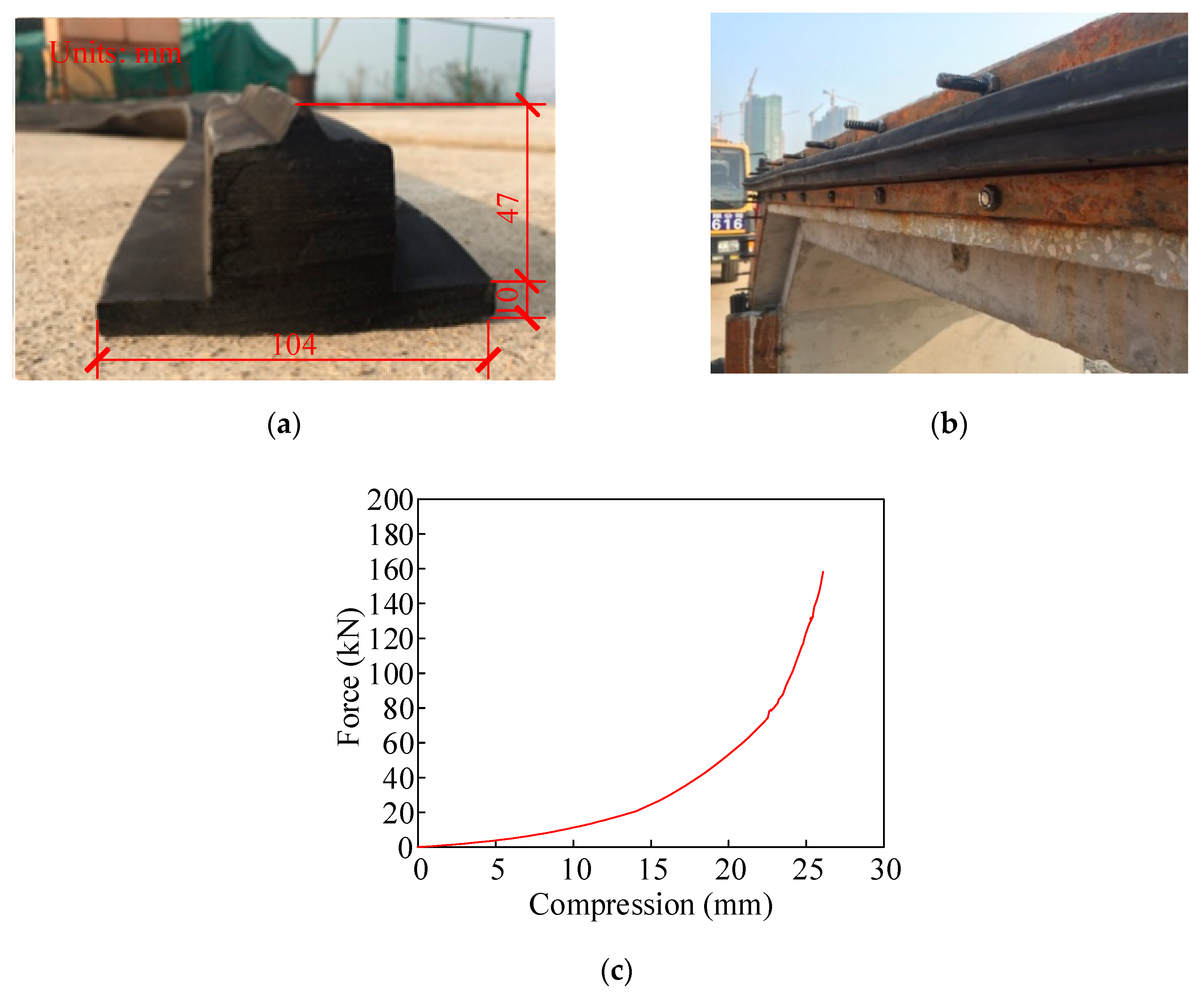
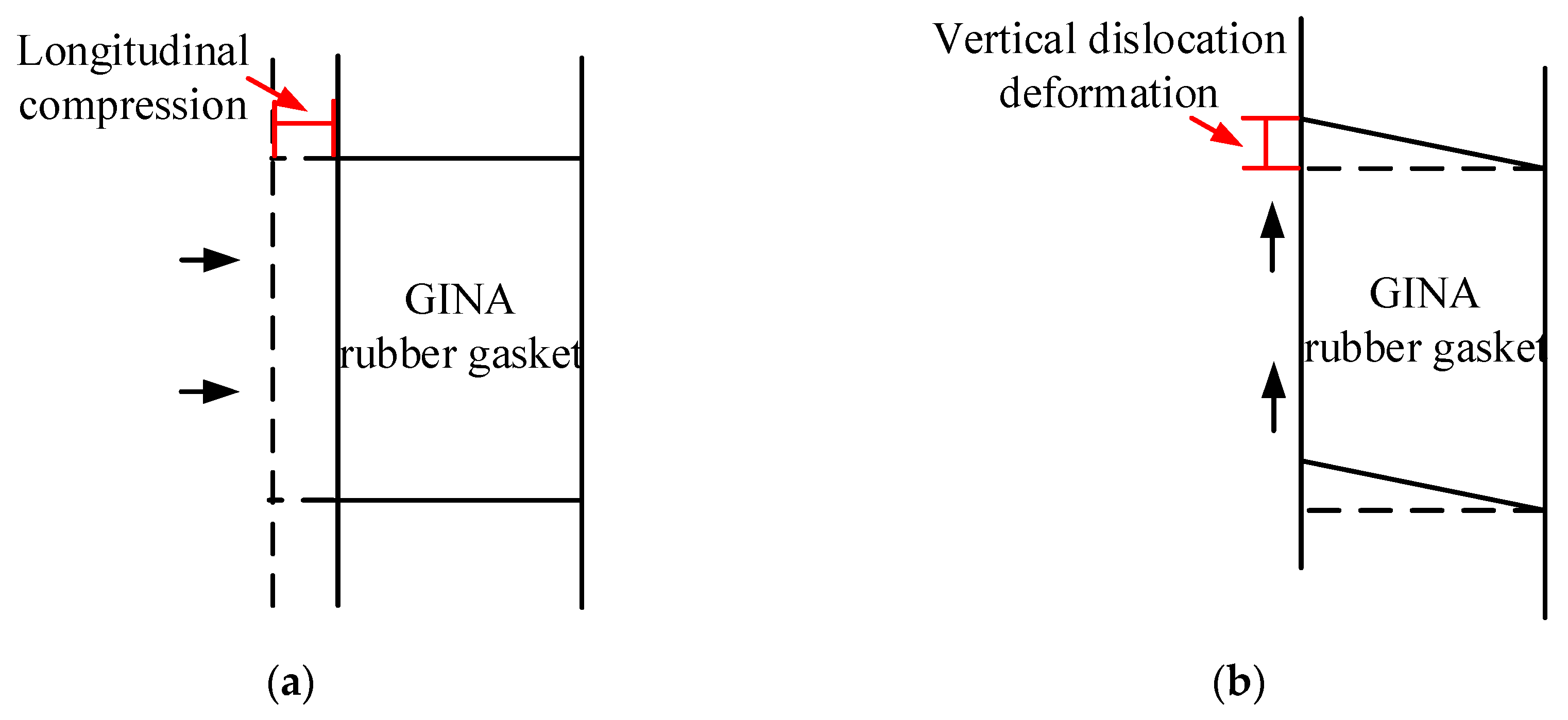
2.1.4. GINA Rubber Gasket
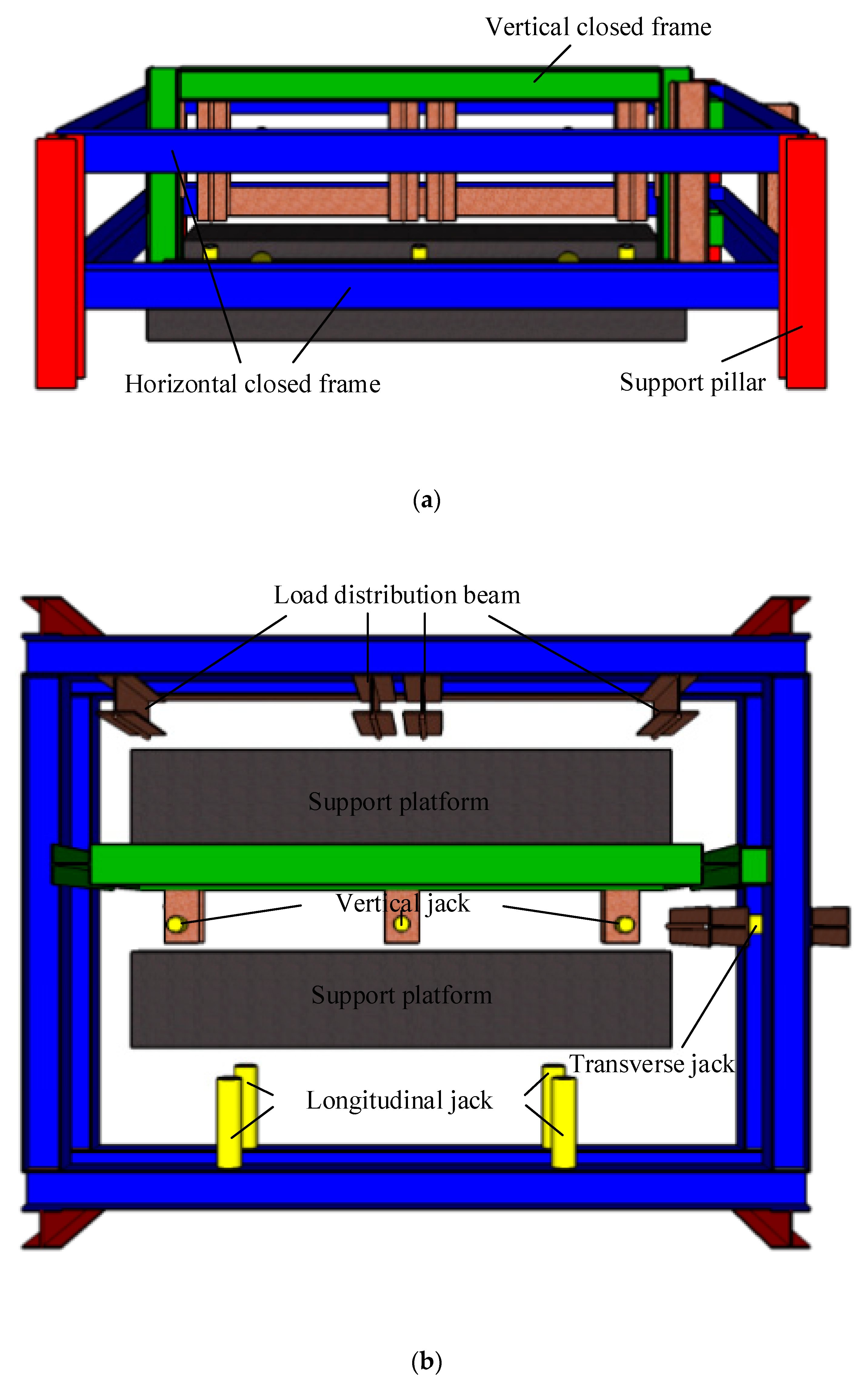
2.2. Loading System
2.3. Arrangement of Displacement Measuring Points
3. Loading Cases
3.1. Loading Protocol
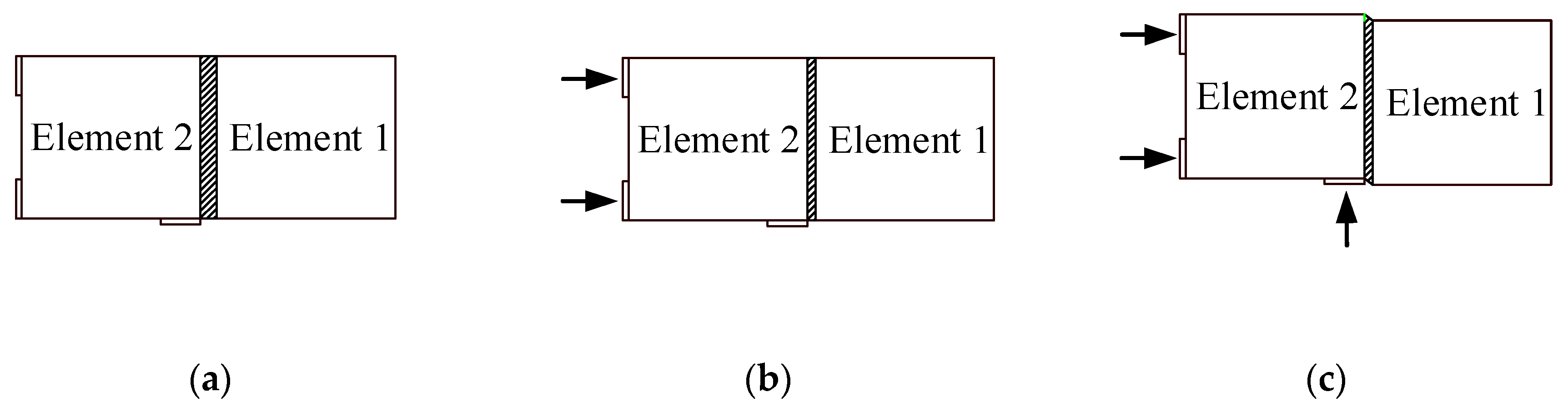
3.2. Compression–Vertical Shear Test
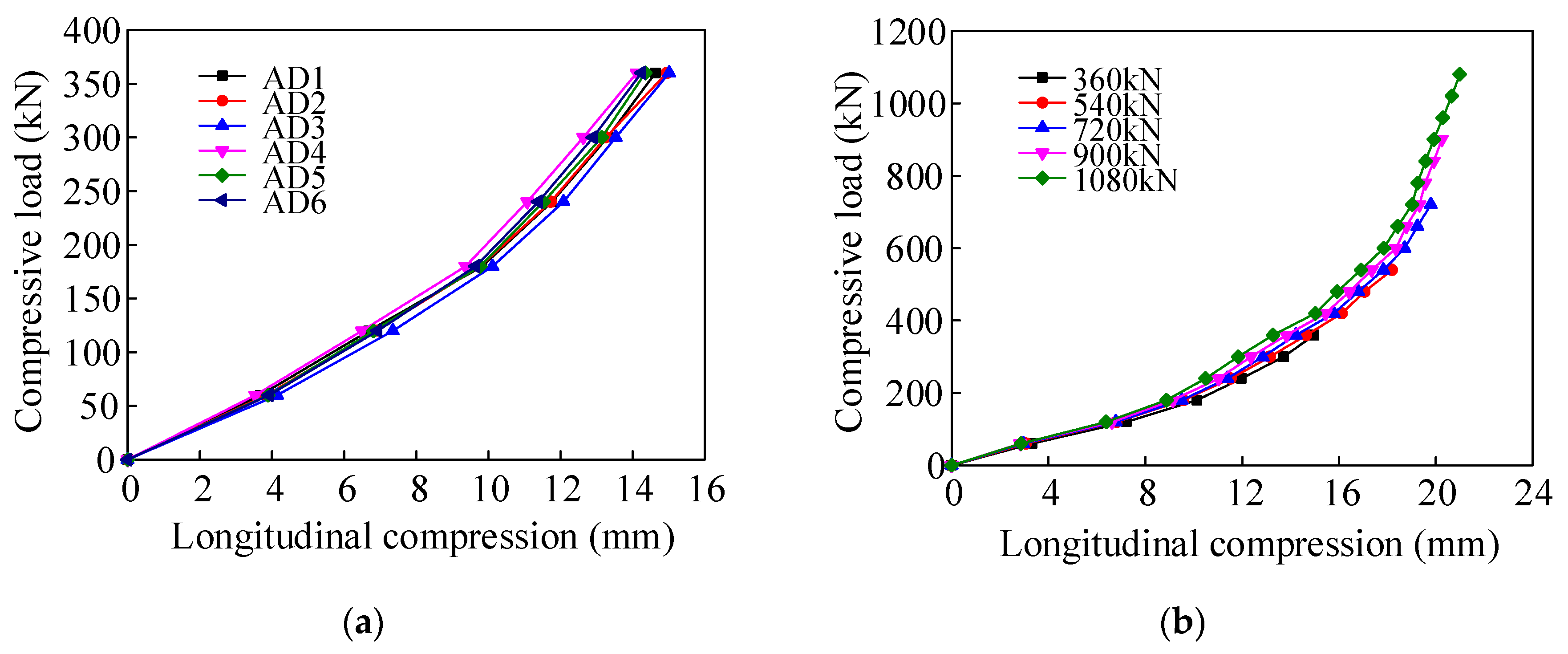
3.2.1. Compression–Vertical Shear Test Subjected to Incremental Longitudinal Compressive Loads
3.2.2. Compression–Vertical Shear Destruction Test
3.3. Compression–Bidirectional Shear Test
4. Results and Analysis
4.1. Vertical Shear Behaviors in Compression–Vertical Shear Test
4.1.1. Longitudinal Compression
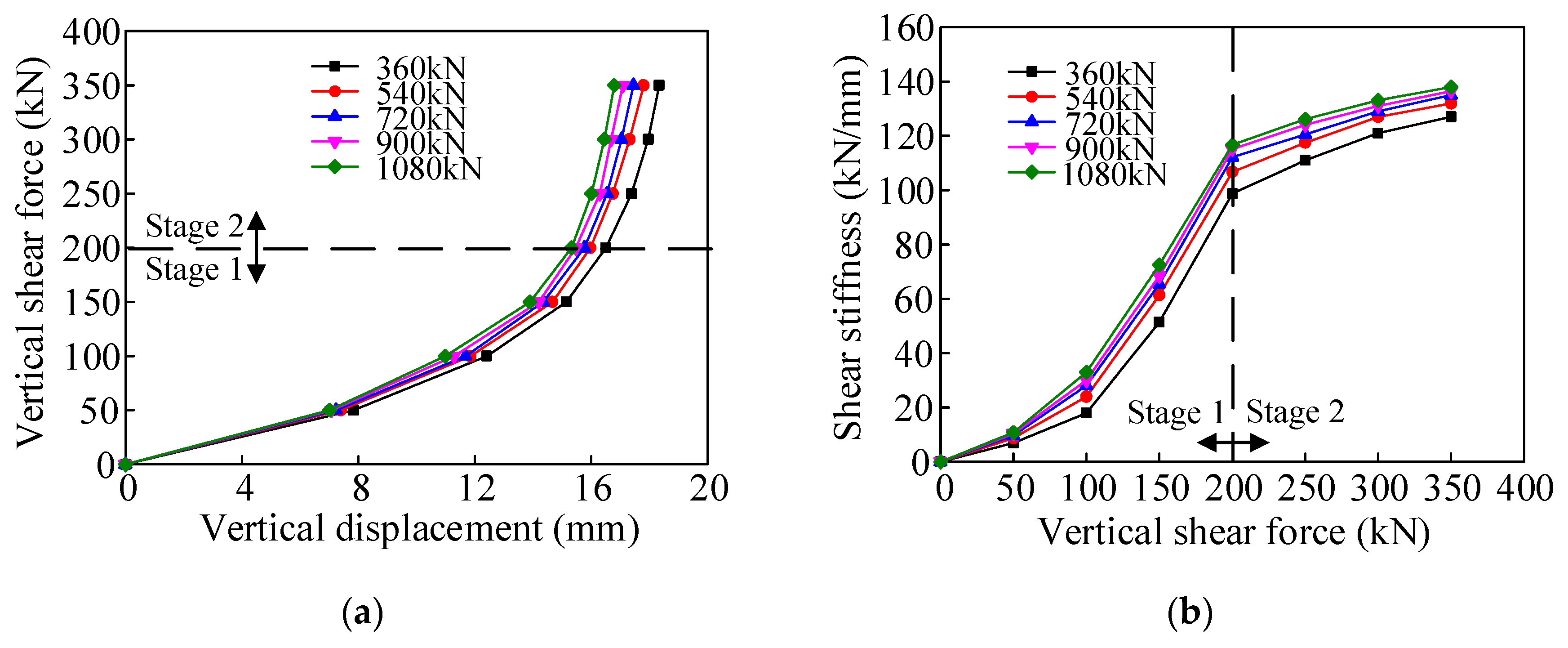
4.1.2. Shear Force–Displacement Curves
4.1.3. Vertical Shear Stiffness
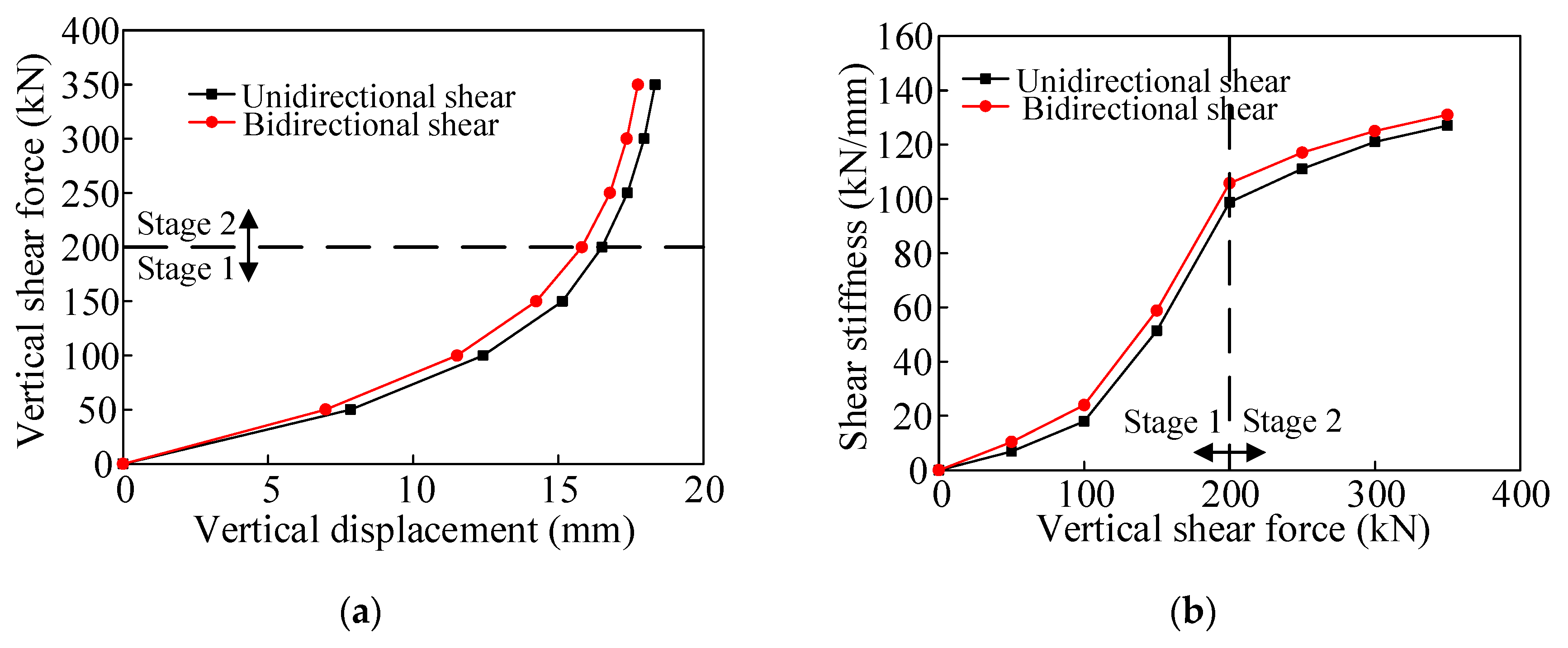
4.2. Vertical Shear Behaviors in Compression–Bidirectional Shear Test
4.2.1. Shear Force–Displacement Curves
4.2.2. Vertical Shear Stiffness
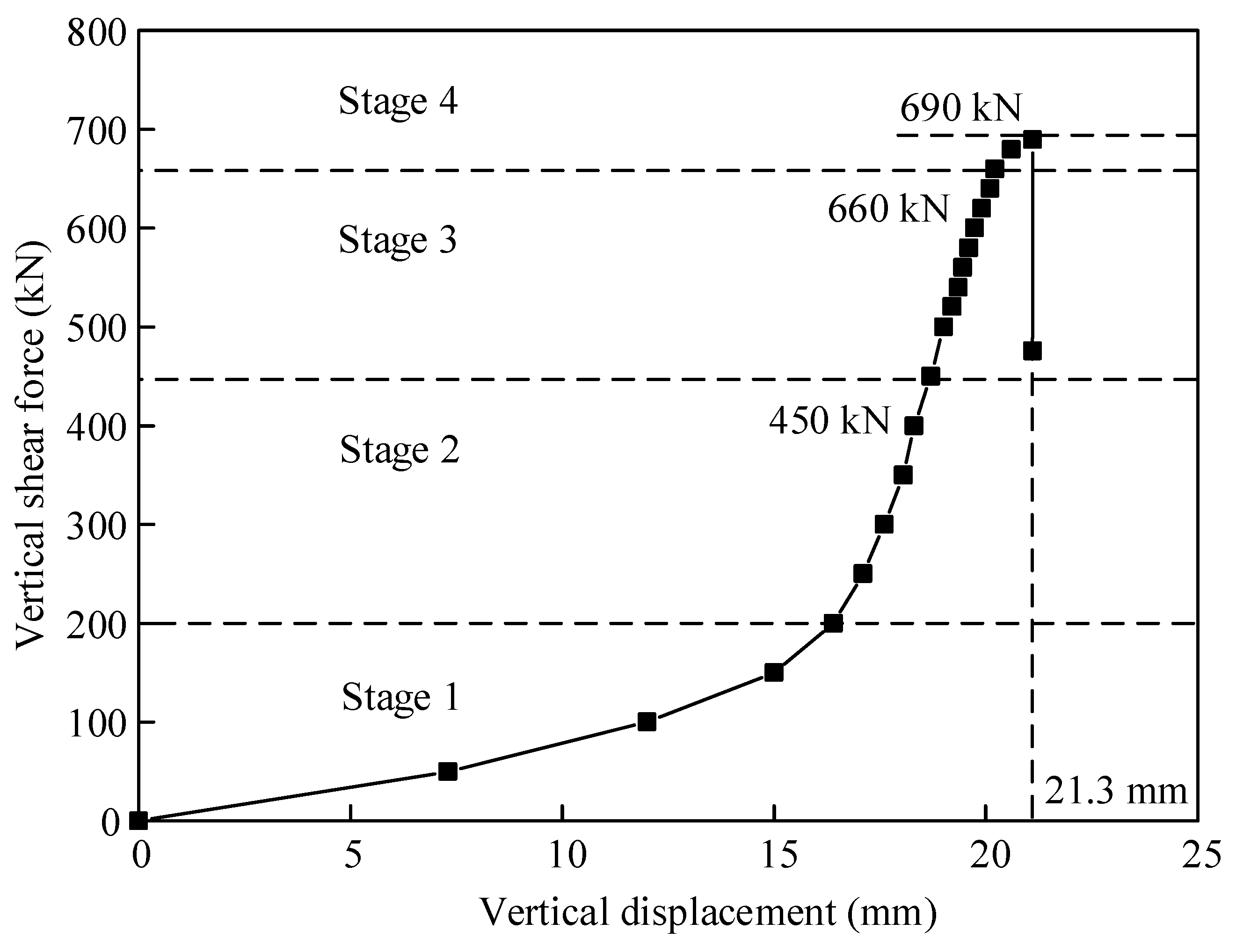
5. Vertical Shear Failure of the Joint
5.1. Ultimate Shear Capacity
5.2. Damage and Failure of the Joint
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lunniss, R.; Baber, J. Immersed Tunnels, 1st ed.; CRC Press: London UK, 2013. [Google Scholar]
- Ai, Q.; Yuan, Y.; Mahadevan, S.; Jiang, X. Probabilistic degradation modelling of circular tunnels assembled from segmental linings. Struct. Concr. 2016, 17, 257–273. [Google Scholar] [CrossRef]
- Ai, Q.; Yuan, Y. State-oriented maintenance strategy for deteriorating segmental Lining of tunnel. J. Civ. Eng. Manage. 2018, 24, 469–480. [Google Scholar] [CrossRef]
- Ingerslev, C. Immersed and floating tunnels. Procedia Eng. 2010, 4, 51–59. [Google Scholar] [CrossRef]
- Grantz, W.C. Immersed tunnel settlements Part 1: Nature of settlements. Tunn. Undergr. Space Technol. 2001, 16, 195–201. [Google Scholar] [CrossRef]
- Grantz, W.C. Immersed tunnel settlements part 2: Case histories. Tunn. Undergr. Space Technol. Inc. Trenchless Technol. Res. 2001, 16, 203–210. [Google Scholar] [CrossRef]
- Aart, A.J.C.V.; Wet, J.V. The second Benelux tunnel. Tunn. Undergr. Space Technol. 1999, 14, 171–182. [Google Scholar] [CrossRef]
- Kiyomiya, O. Earthquake-resistant design features of immersed tunnels in Japan. Tunn. Undergr. Space Technol. 1995, 10, 463–475. [Google Scholar] [CrossRef]
- Odgaard, S.S.; Jensen, O.P.; Kasper, T.; Yoon, Y.-H.; Chang, Y.; Park, R.-Y. Design of long immersed tunnel for highway in offshore conditions Busan–Geoje Fixed Link. Tunn. Undergr. Space Technol. Inc. Trenchless Technol. Res. 2006, 21, 334. [Google Scholar] [CrossRef]
- Kasper, T.; Steenfelt, J.S.; Pedersen, L.M.; Jackson, P.G.; Heijmans, R.W.M.G. Stability of an immersed tunnel in offshore conditions under deep water wave impact. Coast. Eng. 2008, 55, 753–760. [Google Scholar] [CrossRef]
- Saveur, J.; Grantz, W.C. Chapter 3 structural design of immersed tunnels. Tunn. Undergr. Space Technol. 1997, 12, 93–109. [Google Scholar] [CrossRef]
- Akimoto, K.; Hashidate, Y.; Kitayama, H.; Kumagai, K. Immersed tunnels in Japan: Recent technological trends. In Proceedings of the 2002 Interntional Symposium on Underwater Technology (Cat. No.02EX556), Tokyo, Japan, 19 April 2002; pp. 81–86. [Google Scholar]
- Yu, H.T.; Xiao, W.H.; Yuan, Y.; Taerwe, L. Seismic mitigation for immersion joints: Design and validation. Tunn. Undergr. Space Technol. 2017, 67, 39–51. [Google Scholar] [CrossRef]
- Anastasopoulos, I.; Gerolymos, N.; Drosos, V.; Kourkoulis, R. Nonlinear response of deep immersed tunnel to strong seismic shaking. J. Geotech. Geoenviron. Eng. 2007, 133, 1067–1090. [Google Scholar] [CrossRef]
- Xiao, W.H.; Yuan, Y.; Yu, H.T.; Jing, L.; Chen, Y. Numerical Analysis of Mechanical Behaviours of Immersion Joint. In Proceedings of the 11th World Congress on Computational Mechanics (WCCM XI), Barcelona, Spain, 20–25 July 2014. [Google Scholar]
- Li, Z.X.; Li, C.H.; Yan, J.B. Seismic behaviour of hybrid-fibre reinforced concrete shear keys in immersed tunnels. Tunn. Undergr. Space Technol. 2019, 88, 16–28. [Google Scholar] [CrossRef]
- Xiao, W.H.; Yu, H.T.; Yuan, Y.; Taerwe, C.; Xu, G.P. Compression-shear behavior of a scaled immersion joint with steel shear keys. Tunn. Undergr. Space Technol. 2017, 70, 76–88. [Google Scholar] [CrossRef]
- Ding, W.Q.; Liu, P. Research on the Three Dimensional Nonlinear Stiffness Mechanical Model of Immersed Tube Tunnel Joints. In Proceedings of the Geo Shanghai, Shanghai, China, 26–28 May 2014. [Google Scholar]
- Anastasopoulos, I.; Gerolymos, N.; Drosos, V.; Georgarakos, T.; Kourkoulis, R.; Gazetas, G. Behaviour of deep immersed tunnel under combined normal fault rupture deformation and subsequent seismic shaking. Bull. Earthq. Eng. 2008, 6, 213–239. [Google Scholar] [CrossRef]
- Van Oorsouw, R.S. Behavior of Segment Joints in Immersed Tunnels Under seismic Loading. Master’s Thesis, Delft University of Technology, Delft, Netherlands, June 2010. [Google Scholar]
- Hu, Z.N.; Xie, Y.L.; Xu, G.P.; Bin, S.L.; Zhang, H.G.; Lai, H.P.; Liu, H.Z.; Yan, C.G. Segmental joint model tests of immersed tunnel on a settlement platform: A case study of the Hongkong-Zhuhai-Macao Bridge. Tunn. Undergr. Space Technol. 2018, 78, 188–200. [Google Scholar] [CrossRef]
- Bergsma, J.G.; Bakker, K.J.; Hart, C.M.P. Immersed tunnel design in subarctic rivers. Tunn. Undergr. Space Technol. 2017, 67, 158–166. [Google Scholar] [CrossRef]
- Cheng, X.J.; Jing, L.P.; Cui, J.; Li, Y.Q.; Dong, R. Shaking-table tests for immersed tunnels at different sites. Shock Vibr. 2017, 2017, 2546318. [Google Scholar] [CrossRef]
- Kiyomiya, O.; Higashiyama, Y.; Ohgoshi, Y.; Yokota, H. New type flexible joint for the Yumeshima Immersed Tunnel. Tunn. Undergr. Space Technol. 2006, 21, 331. [Google Scholar] [CrossRef]
- Kiyomiya, O.; Fujisawa, T.; Yamada, M.; Honda, M. Mechanical Properties of Flexible Joint Between Submerged Tunnel Elements; Report for Port and Harbour Research Institute: Yokosuka, Japan, 1992. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Longitudinal Compressive Load (kN) | Vertical Shear Load (kN) |
|---|---|---|
| 1 | 360 | 420 |
| 2 | 540 | 420 |
| 3 | 720 | 420 |
| 4 | 900 | 420 |
| 5 | 1080 | 420 |
| Step | Longitudinal Compressive Load (kN) | Vertical Shear Load (kN) |
|---|---|---|
| 1 | 360 | 0 |
| 2 | 360 | 70 |
| 3 | 360 | 120 |
| 4 | 360 | 170 |
| … | 360 | … |
| 10 | 360 | 570 |
| 11 | 360 | 590 |
| 12 | 360 | 610 |
| … | 360 | … |
| Step | Longitudinal Compressive Load (kN) | Transverse Shear Load (kN) | Vertical Shear Load (kN) |
|---|---|---|---|
| 1 | 360 | 0 | 0 |
| 2 | 360 | 80 | 0 |
| 3 | 360 | 80 | 70 |
| 4 | 360 | 80 | 120 |
| 5 | 360 | 80 | 170 |
| … | 360 | 80 | … |
| 10 | 360 | 80 | 420 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Luo, J.; Yu, H. Experimental Study on Vertical Shear Behaviors of an Immersion Joint with Steel Shear Keys. Appl. Sci. 2019, 9, 5056. https://doi.org/10.3390/app9235056
Yuan Y, Luo J, Yu H. Experimental Study on Vertical Shear Behaviors of an Immersion Joint with Steel Shear Keys. Applied Sciences. 2019; 9(23):5056. https://doi.org/10.3390/app9235056
Chicago/Turabian StyleYuan, Yong, Jianhui Luo, and Haitao Yu. 2019. "Experimental Study on Vertical Shear Behaviors of an Immersion Joint with Steel Shear Keys" Applied Sciences 9, no. 23: 5056. https://doi.org/10.3390/app9235056
APA StyleYuan, Y., Luo, J., & Yu, H. (2019). Experimental Study on Vertical Shear Behaviors of an Immersion Joint with Steel Shear Keys. Applied Sciences, 9(23), 5056. https://doi.org/10.3390/app9235056