Control Strategy to Regulate Voltage and Share Reactive Power Using Variable Virtual Impedance for a Microgrid




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Control Method
3. Small-Signal Stability Analysis
4. Results
4.1. Distribution Network Case Test
4.2. Single Electric Vehicle Connection
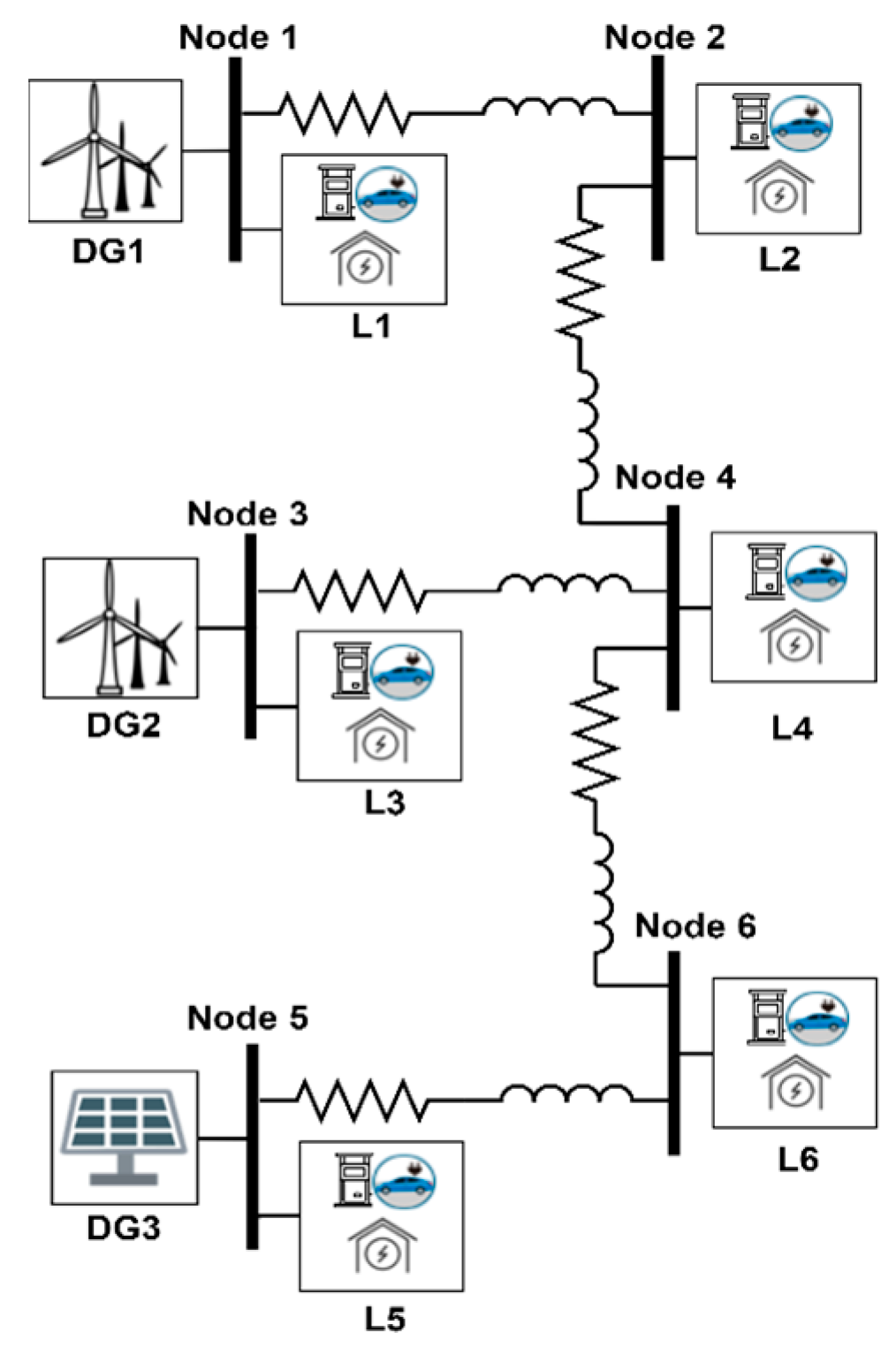
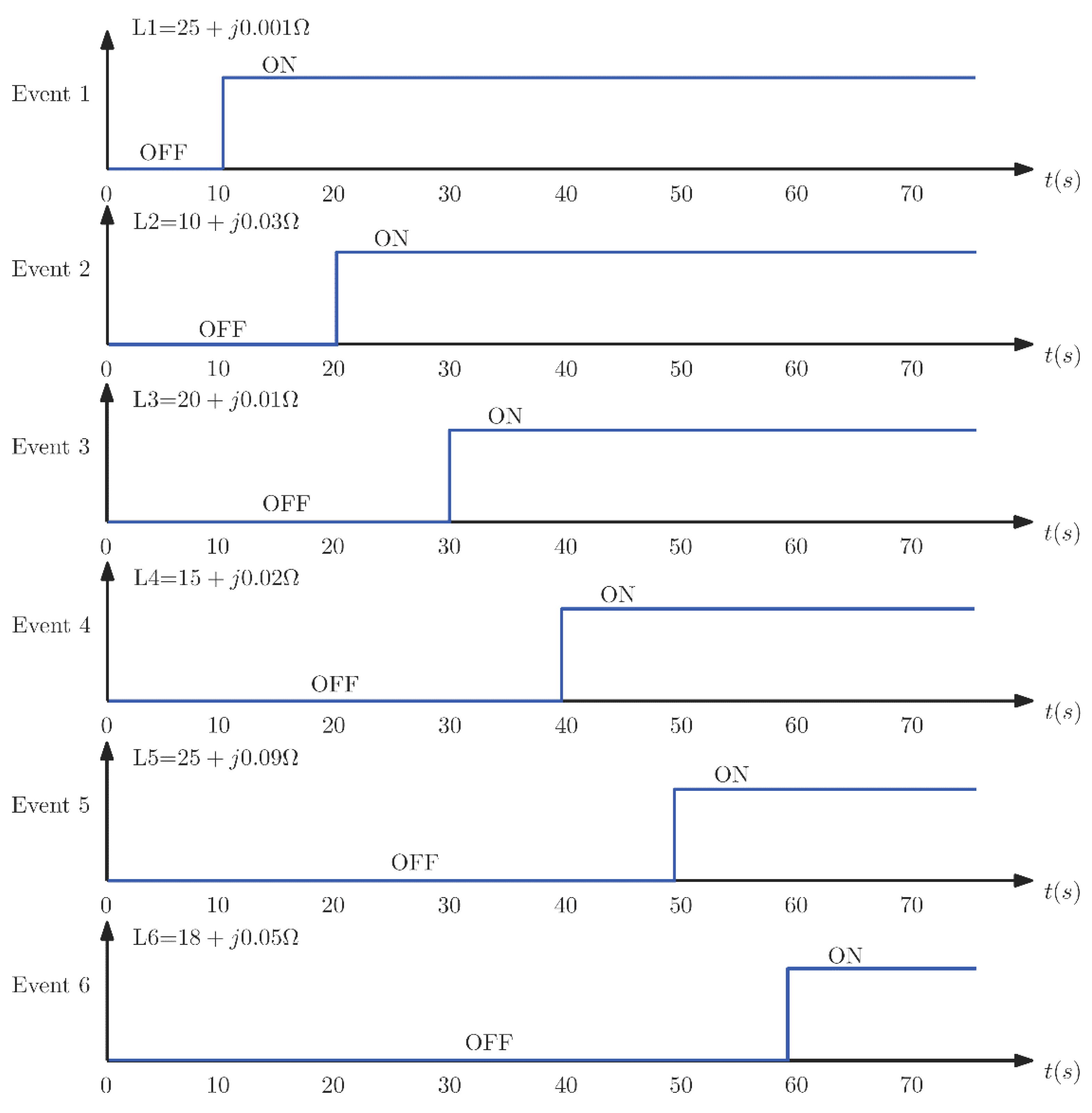
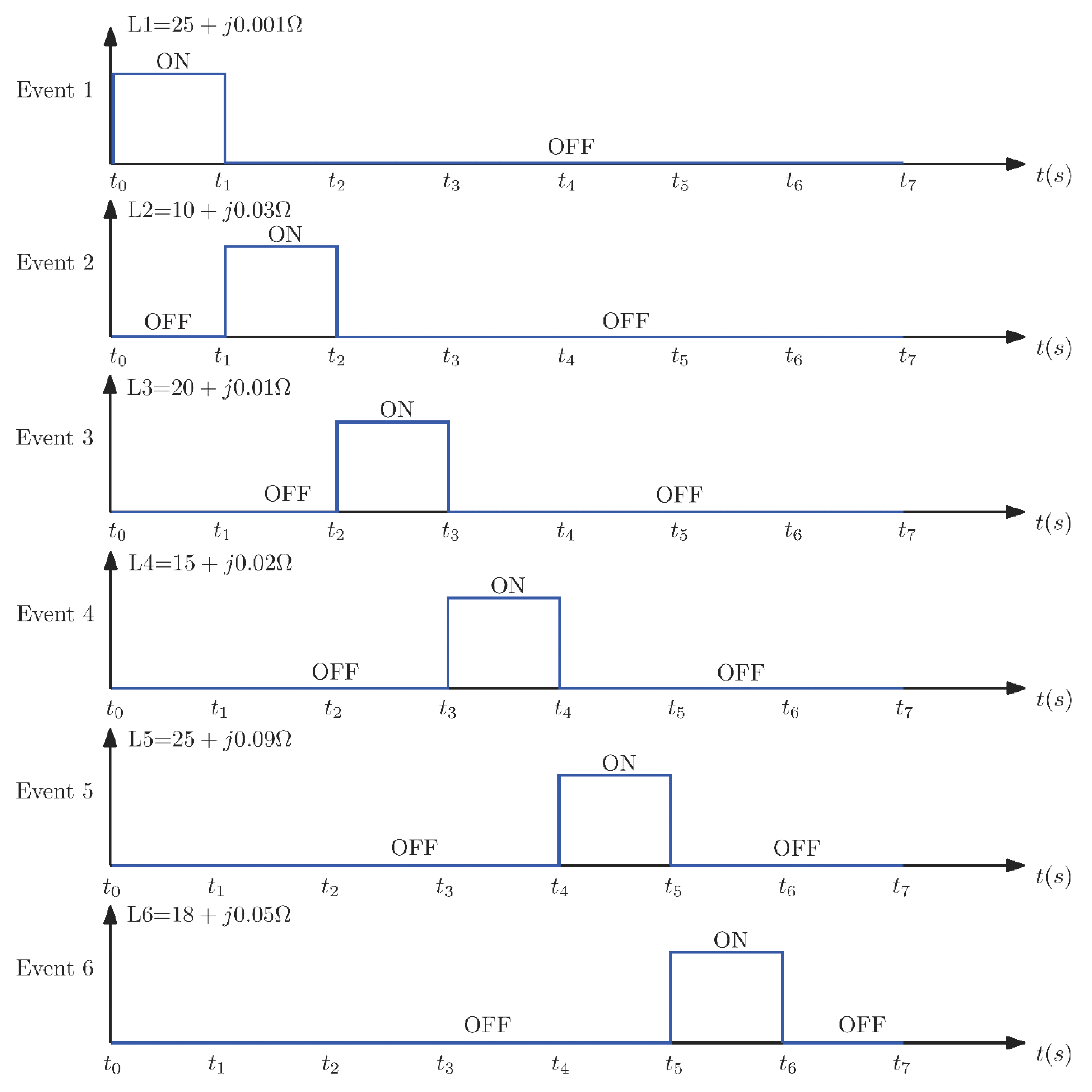
- Event 1: an EV is connected to Node 1 at 10 s, increasing the power consumption of L1 by three times the value of the fixed load (25 + j0.001 Ω).
- Event 2: an EV is connected to Node 2 from 20 s, increasing the power consumption of L2 about three times the value of the fixed load (10 + j0.03 Ω).
- Event 3: from 30 s, an EV is connected to Node 3, increasing the power consumption of L3 by two times the value of the fixed load (20 + j0.01 Ω).
- Event 4: another EV is connected from 40 s to Node 4, increasing the power consumption of L4 by two times the value of the fixed load (15 + j0.02 Ω).
- Event 5: the connection of an EV is presented in Node 5 from 50 to 60 s, increasing the power consumption of L5 by 12 times the value of the fixed load (25 + j0.09 Ω).
- Event 6: this final event considers that an EV is connected from 60 s to Node 6, which generates an additional power consumption of L6 of almost five times the value of the fixed load (18 + j0.05 Ω).
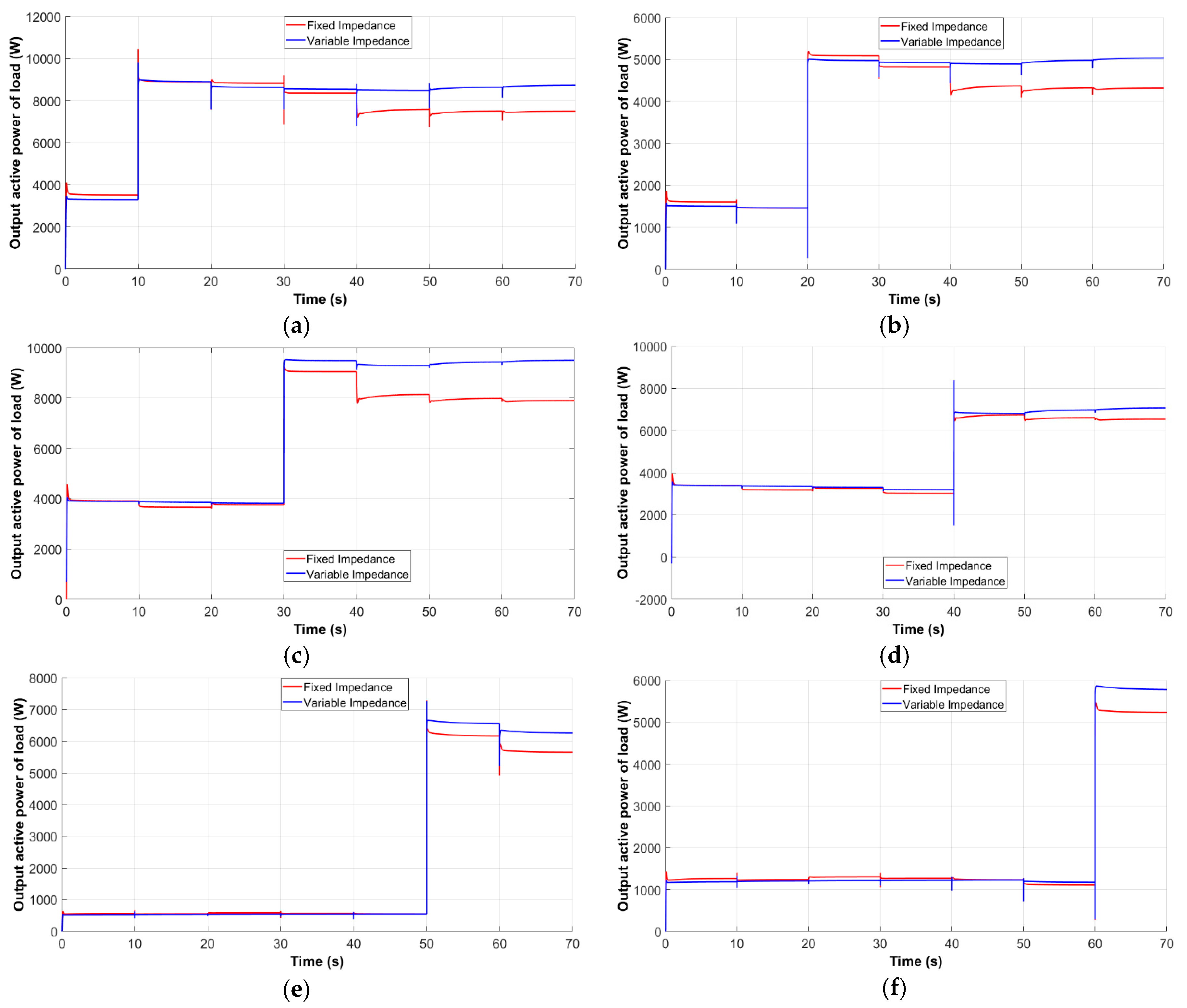
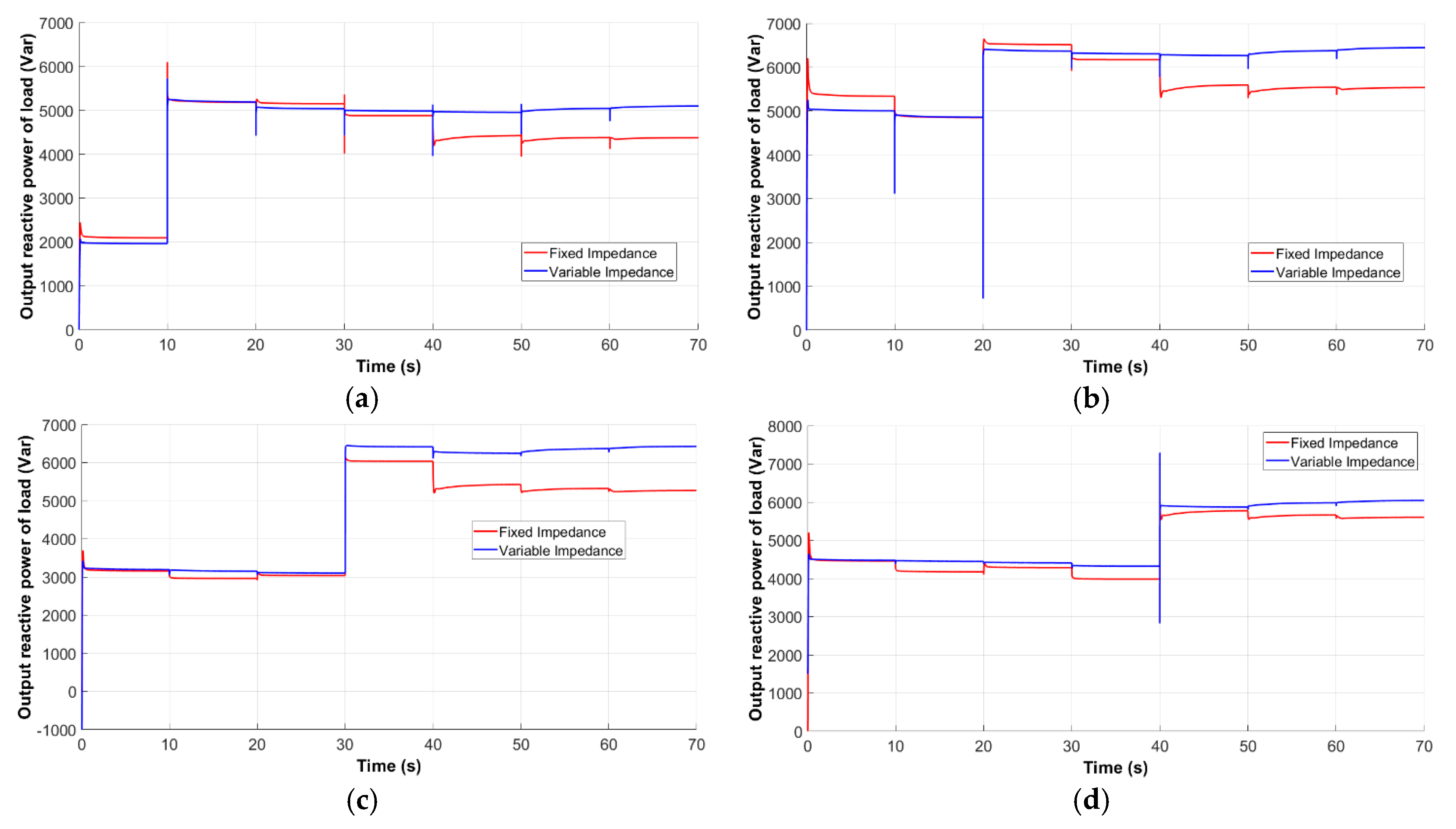
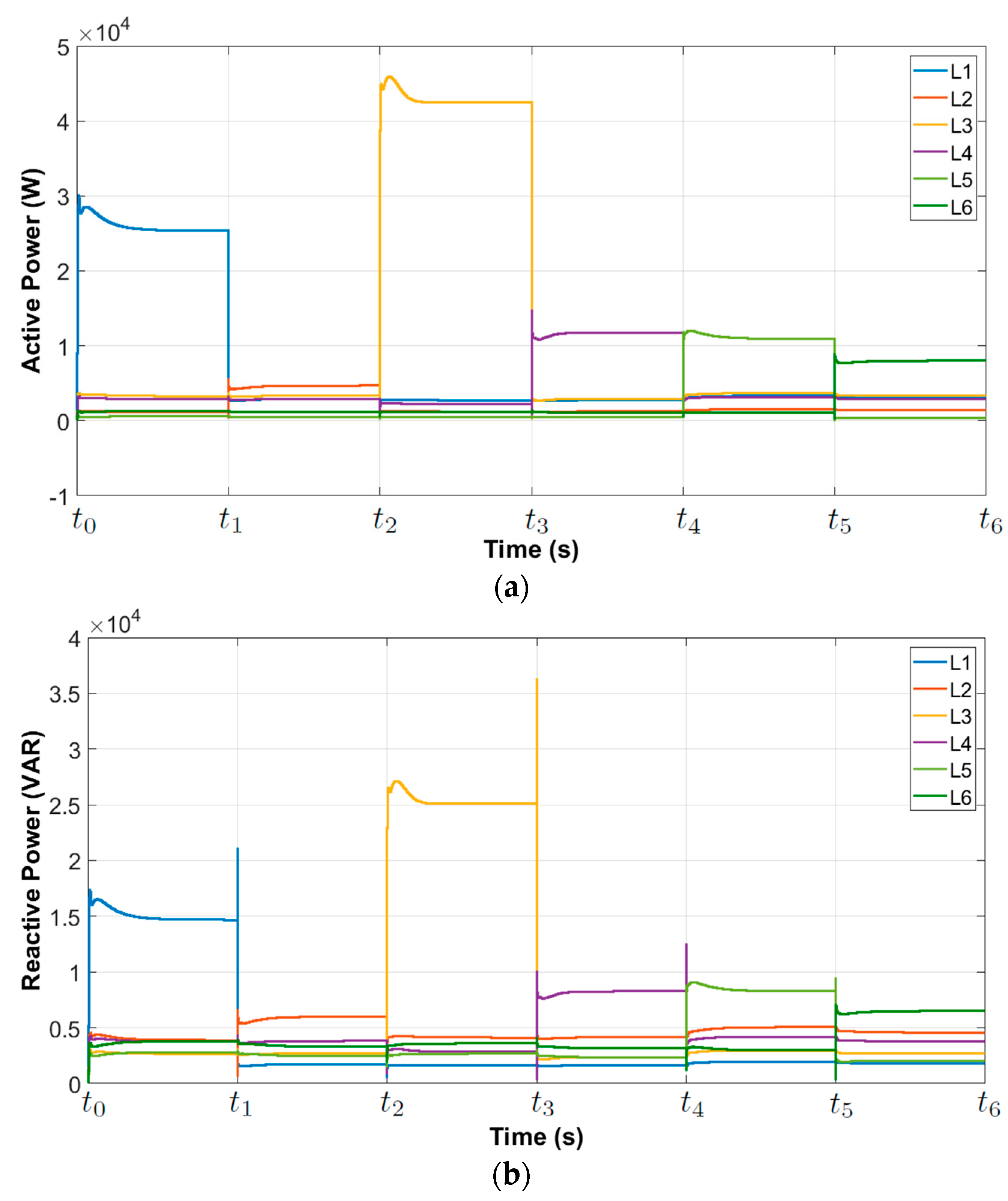
4.2.1. Active and Reactive Power of Loads
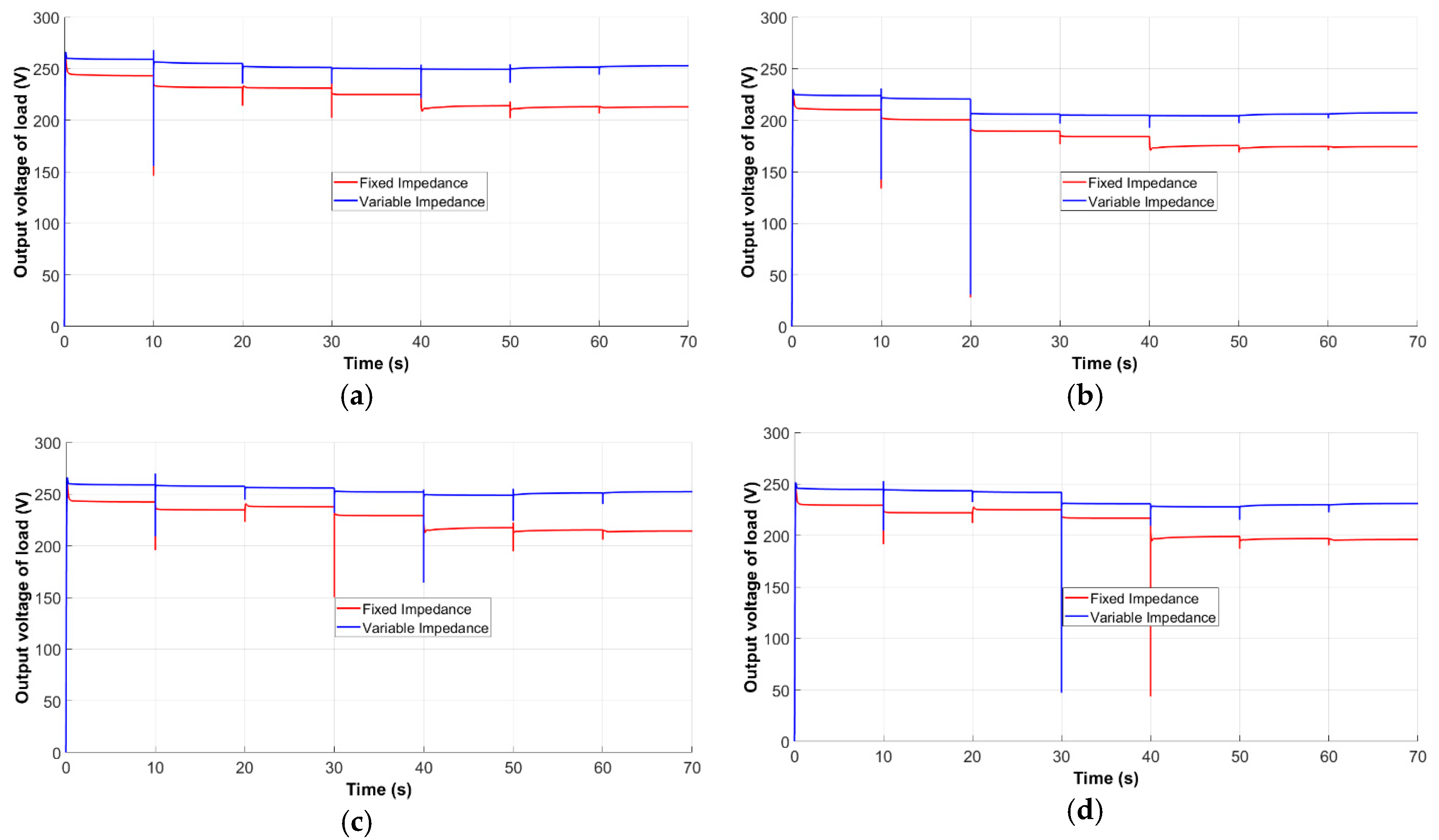
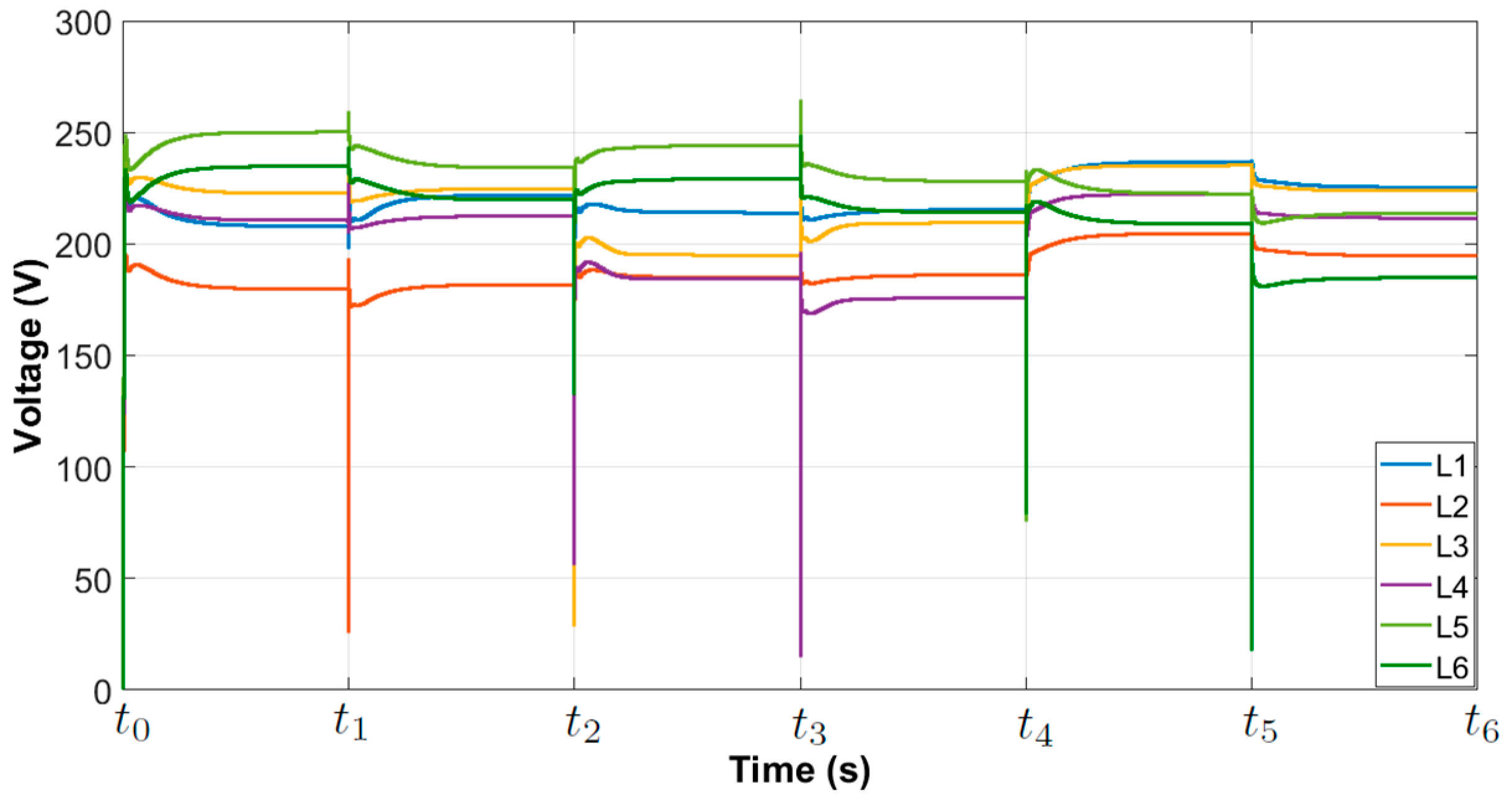
4.2.2. Voltage in Loads
4.2.3. Responses of DGs
4.3. Multiple Electric Vehicle Connection and Disconnection
- Event 1: at the beginning of the first period (from to ), L1 increases the active power consumption after connecting five EVs to Node 1, changing the power by nine times the fixed load of 25 + j0.001 Ω; at the end of the period, this load is disconnected.
- Event 2: at the beginning of the second period (from to ), the active power increases in L2 when one EV is connected to Node 2, and the power increases by four times its normal value of 10 + j0.03 Ω; at the end of the period, this load is disconnected.
- Event 3: at the beginning of the third period (from to ), the greatest change of active power is presented in Node 3 (L3) with the connection of 10 EVs, and the consumption in that node is almost 13 times the fixed load of 20 + j0.01 Ω; at the end of the period, this load is disconnected.
- Event 4: at the beginning of the fourth period (from to ), three EVs are connected to Node 4 (L4), which provides a power consumption of almost five times the average consumption of 15 + j0.02 Ω; at the end of the period, this load is disconnected.
- Event 5: at the beginning of the fifth period (from to ), the connection of two EVs is presented at Node 5 (L5), resulting in an increase in the load of 22 times the normal active power consumption with respect to the fixed load of 25 + j0.09 Ω; at the end of the period, this load is disconnected.
- Event 6: at the beginning of the sixth period (from to ), two EVs are connected to Node 6 (L6), which generates an additional power consumption at the node of almost eight times the normal consumption of 18 + j0.05 Ω; at the end of the period, this load is disconnected.
4.3.1. Active and Reactive Power
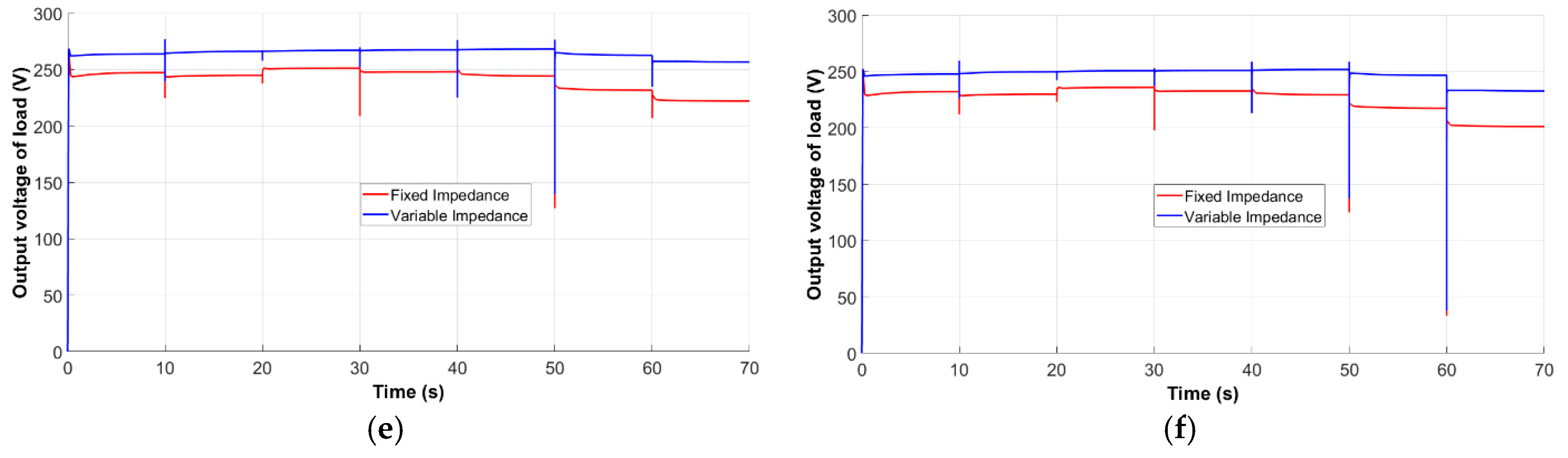
4.3.2. Voltage Variations
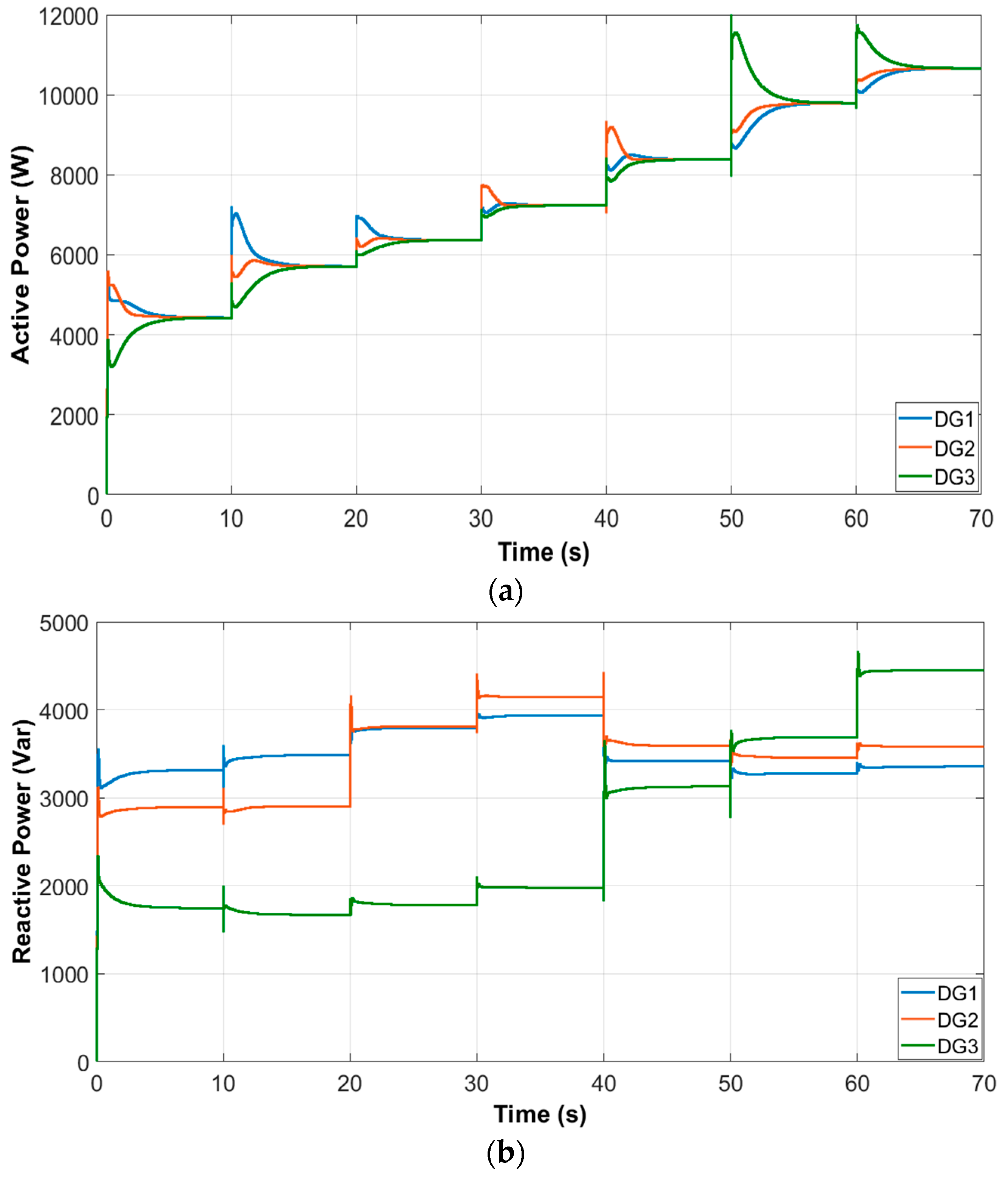
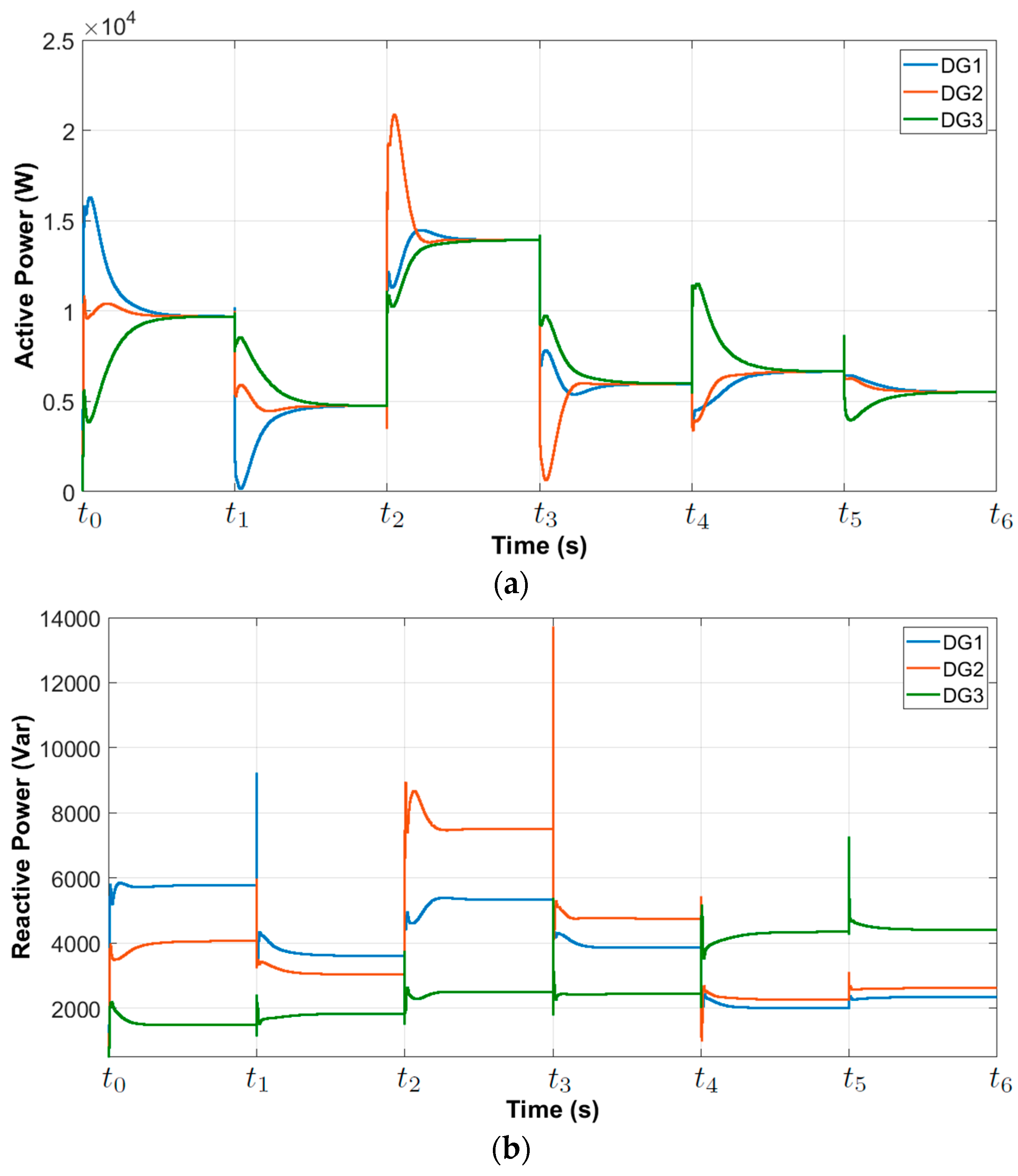
4.3.3. Generation Behavior
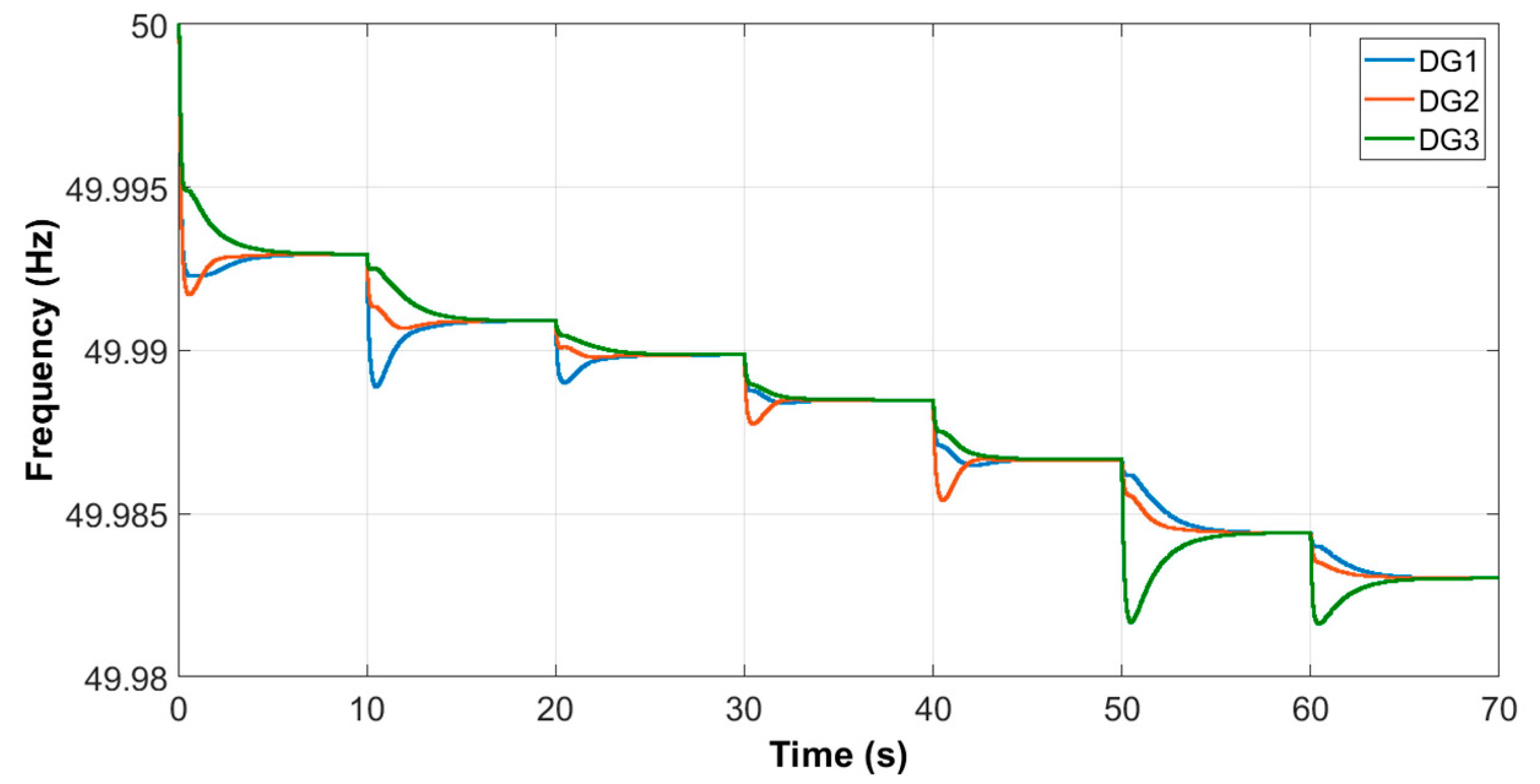
- During the first two periods of simulation (Event 1 and Event 2), the microgrid is subjected to the connection and disconnection of five EVs in Node 1 and followed by one EV connected to Node 2. During these two periods, DGs 1 and 3 are the ones that present the most changes in active power and after some seconds, they finish sharing similar values.
- Then, in the third period (Event 3), 10 EVs are connected to Node 3 at the beginning of the period and disconnected at the end of the period. During this period, DG 2 responds more abruptly to the load change, because this generator is closer than the others to the variable load.
- Later, in the fourth period (Event 4), three EVs are connected to Node 4. In this case, DGs 2 and 3 are the ones that respond most to this load change because they are closest to the load, while the control stabilizes the three generators at the same value of active output power.
- In the fifth period (Event 5), two EVs are connected to Node 5. When analyzing the simulation, the DG that responds more to this change is the DG 3, because it is closest to the variations. However, with the help of the control strategy, the output power is stabilized to the same value as the other two DGs.
- Finally, in the sixth period (Event 6), two EVs are connected to Node 6. In this case, DG 3 undergoes the most abrupt change in power generation, because it is the closest generator to the load.
- DG 1 undergoes the most abrupt change in reactive power during the first period (Event 1), because the connection of EVs is closest to this generator.
- Next, during the second period (Event 2), the same generator undergoes the greatest change in reactive power; however, this time with a negative change because it delivers less reactive power because the load decreases 80% at Node 1 (disconnection of five EVs) and Node 2 increases only to one connected EV.
- In the third period (Event 3), DG 3 increases the reactive power because of the load changes from one EV to 10 EVs. Then, the load increases 90%, and DG 2 delivers more reactive power because the EVs are connected to the same node as the generator. Thus, the proposed control strategy performs regulation according to the closest generator.
- In the fourth period (Event 4), the power reduces in DGs 1 and 2 because of the load change from 10 EVs at Node 3 to only three EVs connected at Node 4.
- In the fifth period (Event 5), the powers of DGs 1 and 2 are reduced because three EVs are disconnected from Node 4 and two EVs are connected to Node 5. If the connection of EVs occurs at a greater distance from these two DGs and much closer to DG 3, then the reactive power in DG 3 increases considerably.
- Finally, in the sixth period (Event 6), it is possible to see a slight increase in reactive power delivered by DGs 1, 2, and 3. Although the connection of two EVs at Node 6 is equal to those disconnected from Node 5, the power requirement changes, and they are separated by a line impedance R = 0.321 Ω and L = 6.23 mH; hence, the reactive power delivered from the DGs in the microgrid is increased.
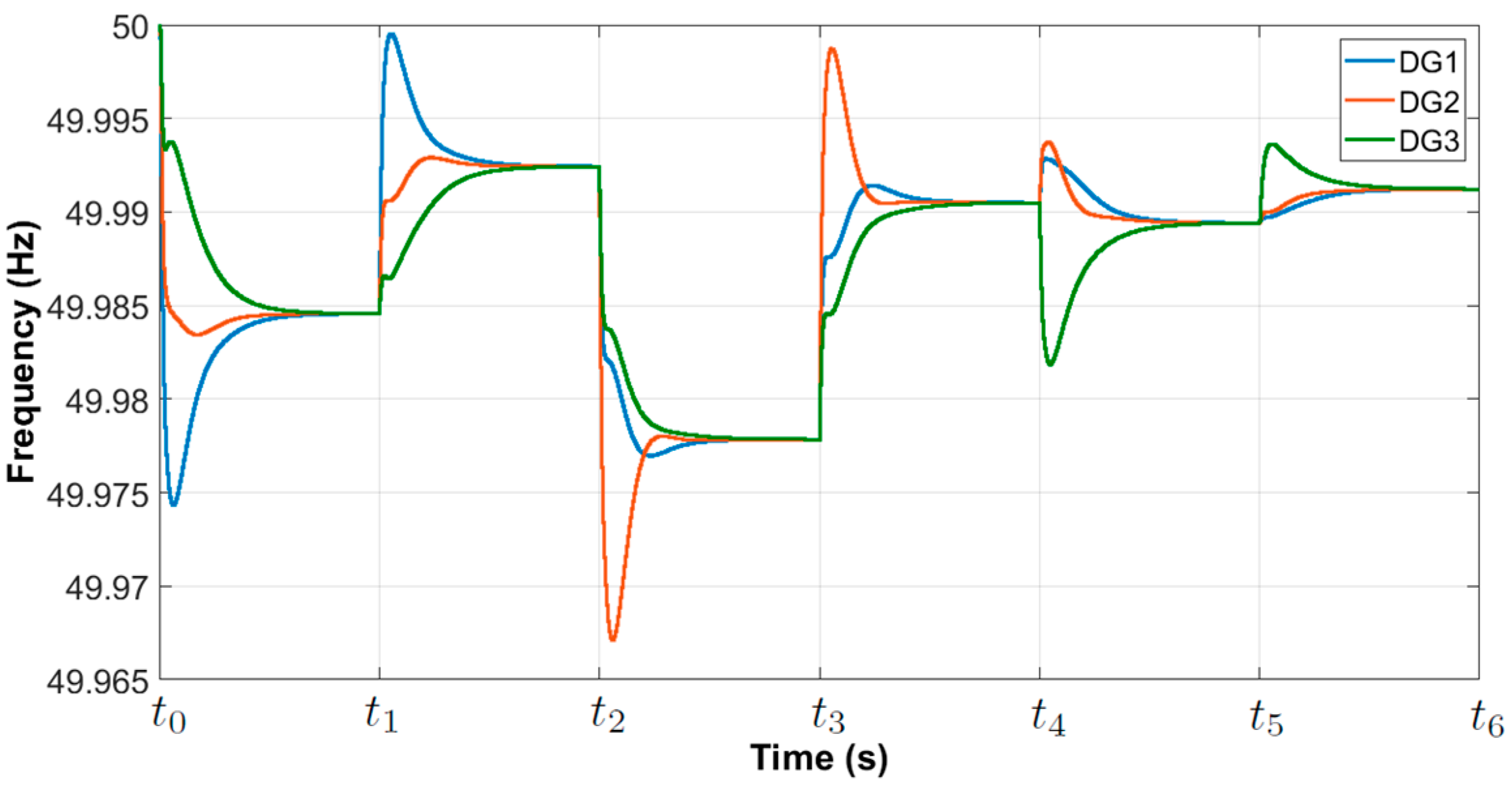
4.3.4. Frequency Regulation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Neves, S.A.; Marques, A.C.; Fuinhas, J.A. Is energy consumption in the transport sector hampering both economic growth and the reduction of CO2 emissions? A disaggregated energy consumption analysis. Transp. Policy 2017, 59, 64–70. [Google Scholar] [CrossRef]
- Lirola, J.M.; Castã Neda, E.; Lauret, B.; Khayet, M. A review on experimental research using scale models for buildings: Application and methodologies. Energy Build. 2017, 142, 72–110. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, M.R. Power Management Strategies for a Microgrid With Multiple Distributed Generation Units. IEEE Trans. Power Syst. 2006, 21, 1821–1831. [Google Scholar] [CrossRef]
- Lasseter, R.H. MicroGrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting. Conference Proceedings (Cat. No.02CH37309), New York, NY, USA, 27–31 January 2002; Volume 1, pp. 305–308. [Google Scholar]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Shaukat, N.; Khan, B.; Ali, S.M.; Mehmood, C.A.; Khan, J.; Farid, U.; Majid, M.; Anwar, S.M.; Jawad, M.; Ullah, Z. A survey on electric vehicle transportation within smart grid system. Renew. Sustain. Energy Rev. 2018, 81, 1329–1349. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef]
- Pode, R. Battery charging stations for home lighting in Mekong region countries. Renew. Sustain. Energy Rev. 2015, 44, 543–560. [Google Scholar] [CrossRef]
- Diyun, W.; Chau, K.T.; Gao, S. Multilayer framework for vehicle-to-grid operation. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Romo, R.; Micheloud, O. Power quality of actual grids with plug-in electric vehicles in presence of renewables and micro-grids. Renew. Sustain. Energy Rev. 2015, 46, 189–200. [Google Scholar] [CrossRef]
- Guille, C.; Gross, G. A conceptual framework for the vehicle-to-grid (V2G) implementation. Energy Policy 2009, 37, 4379–4390. [Google Scholar] [CrossRef]
- Frieske, B.; Kloetzke, M.; Mauser, F. Trends in vehicle concept and key technology development for hybrid and battery electric vehicles. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–12. [Google Scholar]
- Sovacool, B.K.; Kester, J.; Noel, L.; de Rubens, G.Z. Contested visions and sociotechnical expectations of electric mobility and vehicle-to-grid innovation in five Nordic countries. Environ. Innov. Soc. Transit. 2019, 31, 170–183. [Google Scholar] [CrossRef]
- Ilo, A. “Link”—The smart grid paradigm for a secure decentralized operation architecture. Electr. Power Syst. Res. 2016, 131, 116–125. [Google Scholar] [CrossRef]
- Green, J.; Newman, P. Citizen utilities: The emerging power paradigm. Energy Policy 2017, 105, 283–293. [Google Scholar] [CrossRef]
- Matko, V.; Brezovec, B. Improved Data Center Energy Efficiency and Availability with Multilayer Node Event Processing. Energies 2018, 11, 2478. [Google Scholar] [CrossRef]
- De Ridder, F.; D’Hulst, R.; Knapen, L.; Janssens, D. Applying an Activity based Model to Explore the Potential of Electrical Vehicles in the Smart Grid. Procedia Comput. Sci. 2013, 19, 847–853. [Google Scholar] [CrossRef]
- Lei, S.; Xu, H.; Li, D.; Zhang, Z.; Han, Y. The photovoltaic charging station for electric vehicle to grid application in Smart Grids. In Proceedings of the 2012 IEEE 6th International Conference on Information and Automation for Sustainability, Beijing, China, 27–29 September 2012; pp. 279–284. [Google Scholar]
- Aliasghari, P.; Mohammadi-Ivatloo, B.; Alipour, M.; Abapour, M.; Zare, K. Optimal scheduling of plug-in electric vehicles and renewable micro-grid in energy and reserve markets considering demand response program. J. Clean. Prod. 2018, 186, 293–303. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Stanev, R. A control strategy and operation paradigm for electrical power systems with electric vehicles and distributed energy ressources. In Proceedings of the 2016 19th International Symposium on Electrical Apparatus and Technologies (SIELA), Bourgas, Bulgaria, 29 May–1 June 2016; pp. 1–4. [Google Scholar]
- Hapsari, A.P.N.; Kato, T.; Takahashi, H.; Sasai, K.; Kitagata, G.; Kinoshita, T. Multiagent-based microgrid with electric vehicle allocation planning. In Proceedings of the 2013 IEEE 2nd Global Conference on Consumer Electronics—GCCE 2013, Tokyo, Japan, 1–4 October 2013; pp. 436–437. [Google Scholar]
- Haes Alhelou, H.S.; Golshan, M.E.H.; Fini, M.H. Multi agent electric vehicle control based primary frequency support for future smart micro-grid. In Proceedings of the 2015 Smart Grid Conference (SGC), Tehran, Iran, 22–23 December 2015; pp. 22–27. [Google Scholar]
- Yang, Z.; Duan, B.; Chen, M.; Zhu, Z. A proactive operation strategy of electric vehicle charging-discharging in Photovoltaic micro-grid. In Proceedings of the 2016 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Minneapolis, MN, USA, 6–9 September 2016; pp. 1–5. [Google Scholar]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Coelho, E.A.A.; Cortizo, P.C.; Garcia, P.F.D. Small signal stability for single phase inverter connected to stiff AC system. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference, Phoenix, AZ, USA, 3–7 October 1999; pp. 2180–2187. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina, E.; Candelo-Becerra, J.E.; Hoyos, F.E. Control Strategy to Regulate Voltage and Share Reactive Power Using Variable Virtual Impedance for a Microgrid. Appl. Sci. 2019, 9, 4876. https://doi.org/10.3390/app9224876
Molina E, Candelo-Becerra JE, Hoyos FE. Control Strategy to Regulate Voltage and Share Reactive Power Using Variable Virtual Impedance for a Microgrid. Applied Sciences. 2019; 9(22):4876. https://doi.org/10.3390/app9224876
Chicago/Turabian StyleMolina, Eder, John E. Candelo-Becerra, and Fredy E. Hoyos. 2019. "Control Strategy to Regulate Voltage and Share Reactive Power Using Variable Virtual Impedance for a Microgrid" Applied Sciences 9, no. 22: 4876. https://doi.org/10.3390/app9224876
APA StyleMolina, E., Candelo-Becerra, J. E., & Hoyos, F. E. (2019). Control Strategy to Regulate Voltage and Share Reactive Power Using Variable Virtual Impedance for a Microgrid. Applied Sciences, 9(22), 4876. https://doi.org/10.3390/app9224876