A Novel Sensing Strategy Based on Energy Detector for Spectrum Sensing



Abstract
:1. Introduction
- We analyze the advantages and disadvantages of three classical sensing strategies and demonstrate the superiority of the proposed strategy.
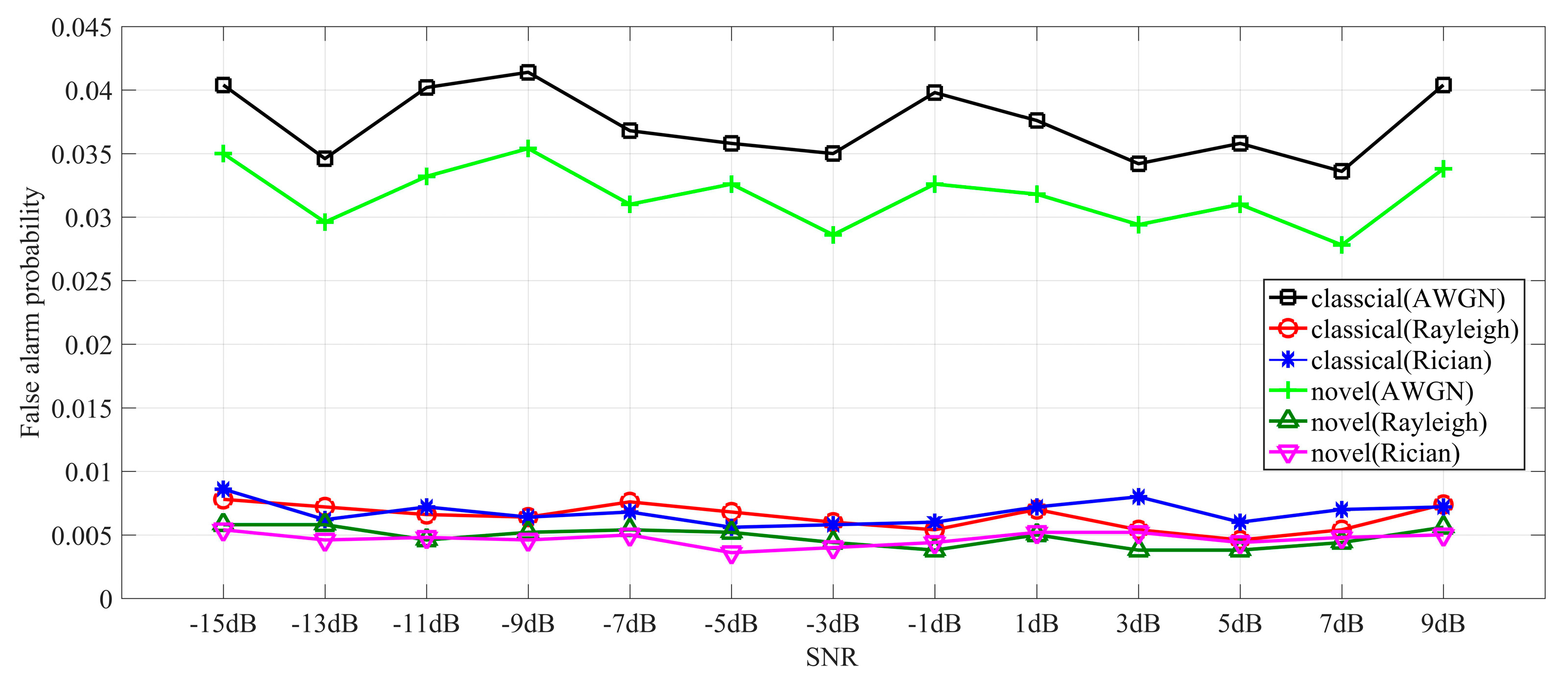
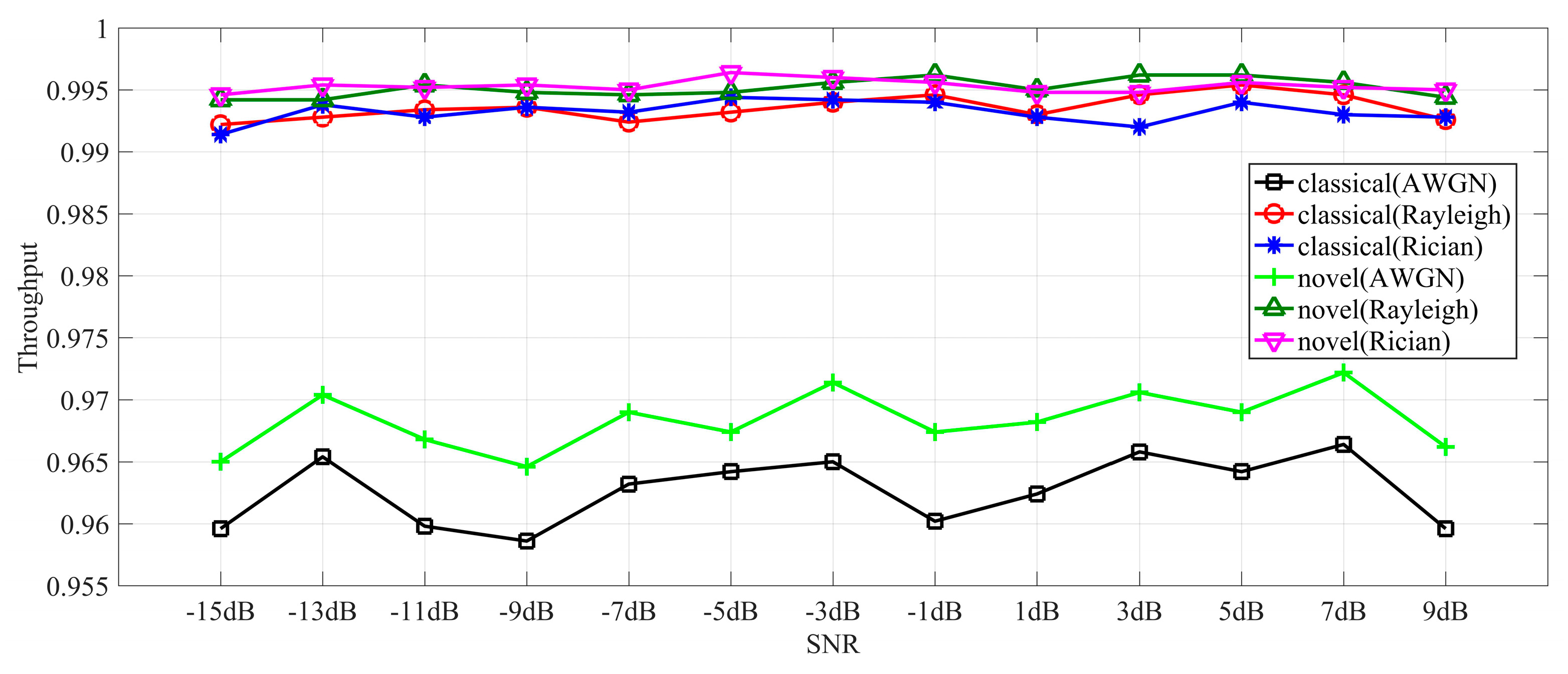
- We conduct simulation experiments respectively in the AWGN, Rayleigh and Rician channel to validate our conclusion proposed in this paper.
2. System Model
- (1)
- and are assumed as independent and identically distributed stationary random process with mean zero and , ;
- (2)
- and are independent mutually;
- (3)
- is a complex Gaussian random variable with mean zero.
3. Proposed Sensing Strategy
3.1. Three Classical Sensing Strategies
3.2. Classical Sensing Strategy 3
3.3. Proposed Sensing Strategy
4. Simulation and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


References
- Federal Communications Commission. Spectrum Policy Task Force Report; FCC Document ET Docket No. 02-155; Federal Communications Commission: Washington, DC, USA, 2002. [Google Scholar]
- Rawat, P.; Singh, K.D.; Bonnin, J.M. Cognitive Radio for M2M and Internet of Things: A survey. Comput. Commun. 2016, 94, 1–29. [Google Scholar] [CrossRef]
- Stevenson, C.R.; Chouinard, G.; Lei, Z.; Hu, W.; Shellhammer, S.J.; Caldwell, W. IEEE 802.22: The First Cognitive Radio Wireless Regional Area Network Standard. IEEE Commun. Mag. 2009, 47, 130–138. [Google Scholar] [CrossRef]
- Lee, W.Y.; Akyildiz, I.F. Optimal spectrum sensing framework for cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 3845–3857. [Google Scholar]
- Ghasemi, A.; Sousa, E.S. Spectrum sensing in cognitive radio networks: Requirements, challenges and design trade-offs. IEEE Commun. Mag. 2008, 46, 32–39. [Google Scholar] [CrossRef]
- Wang, X.; Ekin, S.; Serpedin, E. Joint Spectrum Sensing and Resource Allocation in Multi-Band-Multi-User Cognitive Radio Networks. IEEE Trans. Commun. 2018, 66, 3281–3293. [Google Scholar] [CrossRef]
- Ren, J.; Hu, J.; Zhang, D.; Guo, H.; Zhang, Y.; Shen, X. RF Energy Harvesting and Transfer in Cognitive Radio Sensor Networks: Opportunities and Challenges. IEEE Commun. Mag. 2018, 56, 104–110. [Google Scholar] [CrossRef]
- Chen, Y.; Xiong, Y.; Wang, Q.; Yin, X.; Li, B. Ensuring Minimum Spectrum Requirement in Matching-based Spectrum Allocation. IEEE Trans. Mob. Comput. 2018, 17, 2028–2040. [Google Scholar] [CrossRef]
- Leaves, P.; Moessner, K.; Tafazolli, R.; Grandblaise, D.; Bourse, D.; Tonjes, R.; Breveglieri, M. Dynamic spectrum allocation in composite reconfigurable wireless networks. IEEE Commun. Mag. 2004, 42, 72–81. [Google Scholar] [CrossRef]
- Etkin, R.; Parekh, A.; Tse, D. Spectrum Sharing for unlicensed bands. In Proceedings of the 2nd IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, Dublin, Ireland, 17–20 April 2007. [Google Scholar]
- Ranjan, A.; Singh, B. Design and analysis of spectrum sensing in cognitive radio based on energy detection. In Proceedings of the International Conference on Signal and Information Processing, Vishnupuri, India, 6–8 October 2016; pp. 1–5. [Google Scholar]
- Ilyas, I.; Paul, S.; Rahman, A.; Kundu, R.K. Comparative evaluation of cyclostationary detection based cognitive spectrum sensing. In Proceedings of the Ubiquitous Computing, Electronics, and Mobile Communication Conference, New York, NY, USA, 20–22 October 2016; pp. 1–7. [Google Scholar]
- Zeng, Y.; Liang, Y.C. Spectrum-sensing algorithms for cognitive radio based on statistical covariances. IEEE Trans. Veh. Technol. 2009, 58, 1804–1815. [Google Scholar] [CrossRef]
- Ganesan, G.; Li, Y. Cooperative spectrum sensing in cognitive radio networks. In Proceedings of the IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, Baltimore, MD, USA, 8–11 November 2005. [Google Scholar]
- Digham, F.F.; Alouini, M.-S.; Simon, M.K. On the Energy Detection of Unknown Signals Over Fading Channels. IEEE Trans. Commun. 2007, 55, 21–24. [Google Scholar] [CrossRef]
- Kozłowski, S. Implementation and verification of cyclostationary feature detector for DVB-T signals. IET Signal Process. 2016, 10, 162–167. [Google Scholar] [CrossRef]
- Jin, M.; Guo, Q.; Xi, J.; Li, Y.; Yu, Y.; Huang, D. Spectrum Sensing Using Weighted Covariance Matrix in Rayleigh Fading Channels. IEEE Trans. Veh. Technol. 2015, 64, 5137–5148. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, J.; Li, G.Y.; Kwon, Y.H.; Soong, A.C. Probability-based combination for cooperative spectrum sensing. IEEE Trans. Commun. 2010, 58, 463–466. [Google Scholar] [CrossRef]
- Letaief, K.B.; Wei, Z. Cooperative Spectrum Sensing. In Cognitive Wireless Communication Networks; Springer: Berlin, Germany, 1970. [Google Scholar]
- Li, Z.; Yu, F.R.; Huang, M. A Distributed Consensus-Based Cooperative Spectrum-Sensing Scheme in Cognitive Radios. IEEE Trans. Veh. Technol. 2010, 59, 383–393. [Google Scholar]
- Tong, J.; Jin, M.; Guo, Q.; Li, Y. Cooperative Spectrum Sensing: A Blind and Soft Fusion Detector. IEEE Trans. Wirel. Commun. 2018, 17, 2726–2737. [Google Scholar] [CrossRef]
- Maleki, S.; Leus, G.; Chatzinotas, S.; Ottersten, B. To AND or To OR: On Energy-Efficient Distributed Spectrum Sensing with Combined Censoring and Sleeping. IEEE Trans. Wirel. Commun. 2015, 14, 4508–4521. [Google Scholar] [CrossRef]
- Umebayashi, K.; Lehtomaki, J.J.; Yazawa, T.; Suzuki, Y. Efficient Decision Fusion for Cooperative Spectrum Sensing Based on OR-rule. IEEE Trans. Wirel. Commun. 2012, 11, 2585–2595. [Google Scholar] [CrossRef]
- Nallagonda, S.; Bandari, S.K.; Roy, S.D.; Kundu, S. Cooperative spectrum sensing with censoring of cognitive radios in presence of log-normal shadowing under majority logic fusion. In Proceedings of the International Conference on Communications, Kolkata, India, 28–29 December 2012. [Google Scholar]
- Yang, G.; Wang, J.; Luo, J.; Wen, O.Y.; Li, H.; Li, Q.; Li, S. Cooperative Spectrum Sensing in Heterogeneous Cognitive Radio Networks Based on Normalized Energy Detection. IEEE Trans. Veh. Technol. 2016, 65, 1452–1463. [Google Scholar] [CrossRef]
- Mamidi, R.; Sundru, A. Throughput Analysis in Proposed Cooperative Spectrum Sensing Network with an Improved Energy Detector scheme over Rayleigh Fading Channel. AEU Int. J. Electron. Commun. 2017, 83, 416–426. [Google Scholar] [CrossRef]
- Al Hammadi, A.; Alhussein, O.; Sofotasios, P.C.; Muhaidat, S.; Al-Qutayri, M.; Al-Araji, S.; Karagiannidis, G.K.; Liang, J. Unified Analysis of Cooperative Spectrum Sensing over Composite and Generalized Fading Channels. IEEE Trans. Veh. Technol. 2015, 65, 6949–6961. [Google Scholar] [CrossRef]
- Pandit, S.; Singh, G. Spectrum Sensing in Cognitive Radio Networks: Potential Challenges and Future Perspective. In Spectrum Sharing in Cognitive Radio Networks; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Peh EC, Y.; Liang, Y.C.; Guan, Y.L. Optimization of Cooperative Sensing in Cognitive Radio Networks: A Sensing-Throughput Tradeoff View. IEEE Trans. Veh. Technol. 2009, 58, 5294–5299. [Google Scholar] [CrossRef]
- Zhang, W.; Mallik, R.K.; Letaief, K. Cooperative Spectrum Sensing Optimization in Cognitive Radio Networks. In Proceedings of the IEEE International Conference on Communications, Berjing, China, 19–23 May 2008; pp. 3411–3415. [Google Scholar]
- Zhang, D.; Chen, Z.; Ren, J.; Zhang, N.; Awad, M.K.; Zhou, H.; Shen, X.S. Energy Harvesting-Aided Spectrum Sensing and Data Transmission in Heterogeneous Cognitive Radio Sensor Network. IEEE Trans. Veh. Technol. 2016, 66, 831–843. [Google Scholar] [CrossRef]
- Liang, Y.C.; Zeng, Y.; Peh, E.C.; Hoang, A.T. Sensing-Throughput Tradeoff for Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Formulation | Reference | Advantages | Disadvantages |
|---|---|---|---|---|
| Strategy 1 | [28] | PU protection | communication capacity of secondary network | |
| Strategy 2 | [29] | communication capacity of secondary network | PU protection | |
| Strategy 3 | [30] | a tradeoff between PU protection and communication capacity of secondary network | suboptimality on respective aspect |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Zhu, J.; Mu, J. A Novel Sensing Strategy Based on Energy Detector for Spectrum Sensing. Appl. Sci. 2019, 9, 4634. https://doi.org/10.3390/app9214634
Huang H, Zhu J, Mu J. A Novel Sensing Strategy Based on Energy Detector for Spectrum Sensing. Applied Sciences. 2019; 9(21):4634. https://doi.org/10.3390/app9214634
Chicago/Turabian StyleHuang, Hai, Jia Zhu, and Junsheng Mu. 2019. "A Novel Sensing Strategy Based on Energy Detector for Spectrum Sensing" Applied Sciences 9, no. 21: 4634. https://doi.org/10.3390/app9214634
APA StyleHuang, H., Zhu, J., & Mu, J. (2019). A Novel Sensing Strategy Based on Energy Detector for Spectrum Sensing. Applied Sciences, 9(21), 4634. https://doi.org/10.3390/app9214634